1. Introduction
With the vigorous development of the automotive manufacturing industry, automotive transmission gears are moving toward high-efficiency, high-reliability, low-noise, and lightweight capabilities. Compared with the standard spur gear pairs, the high-tooth gear pairs improve the contact ratio by reducing the module, increasing the addendum height coefficient, and reducing the pressure angle. In the transmission process of the high-tooth gear pair, two pairs of teeth, three pairs of teeth mesh alternately (please note that the number of teeth in the mesh is more than the standard spur gear pair), and the load borne by a single pair of teeth are smaller. High-tooth gear pairs have the characteristics of stable transmission, high bearing capacity, low transmission noise, and high accuracy. At present, the application of high-tooth gear pairs in various types of vehicle transmissions and fluid machinery [
1,
2] is becoming increasingly widespread.
Dudley [
3] compared the calculation methods for the load-bearing capacity of involute cylindrical gears in terms of the ISO and AGMA standards, and proposed that there were significant differences between the two standards when calculating the bending load-bearing capacity of gear teeth. Wu [
4] further discussed, in detail, the differences between the two standards in the strength calculation methods for involute cylindrical gears, as well as compared and analyzed the differences in the meaning and values of the correction coefficients between the two standards via examples. Zhou [
5,
6] compared the differences between the two standards in calculating the strength of spiral bevel gears and involute cylindrical gears, as well as analyzed the characteristics of the two formulas and the meaning of the correlation coefficients. As such, Zhou found that the conclusions obtained from the two standards tended to be conservative. Zhu et al. [
7] derived the contact stress calculation equation for the nodes and other characteristic contact points, and analyzed the trend of the contact stress with the modulus ratio. Their study revealed that the maximum contact stress is at the upper boundary point of the single tooth meshing zone, and the contact stress in this zone decreases with the increase in the modulus ratio. Zorko [
8] conducted a study on the influence of gear parameters on the tooth bending strength of spur gears with progressive bending contact paths via a gear meshing simulation. They concluded the following key influencing factors: the tooth profile shape, the combination of gear pair materials, and the transmitted load. However, no in-depth research was conducted on the relationship between the identification effect and the corresponding tooth root stress. Sun [
9] studied the stress equation of the gear pairs with several teeth to address issues such as insufficient load-bearing capacity. Based on the bending fatigue life of active gears, a new parameter optimization method was proposed with the goal of reducing contact stress, as well as for promoting the development and application of several tooth gears. Müller [
10] studied the effect of precision punching manufacturing on the residual stress and bending strength of involute gears. By investigating the influence of process parameters on the cutting amount, surface roughness, residual stress, and hardness distribution, the precision of gear manufactured by fine blanking can be comparable to gear hobbing, and the bending strength of tooth root can be improved.
Liang [
11] discussed the advantages of using the boundary element method to calculate the bending strength of gears, and compared the tooth profile coefficient calculated by the boundary element method with those that were calculated by the ISO and AGMA standards, thus verifying the rationality of the standard calculation. Filizi [
12] researched FEA on a two-dimensional single-tooth model and derived a new formula for calculating tooth root strength by simulating three different loading scenarios: contact force, distributed force, and concentrated force. Chen [
13] and others studied the effect of tooth profile modification on the bending strength of tooth roots through experiments and finite element methods. The results showed that tooth profile modification can significantly reduce the bending stress during the transmission process of gear pairs. Mo et al. [
14] studied a pair of asymmetric involute spur gears and established an asymmetric gear model that considers the effects of friction and shear stress on tooth root bending stress. The calculation formula for the bending stress of the tooth root of an asymmetric gear under friction was derived. Using MATLAB software, the stress law of the tooth root bending was obtained without neglecting friction and shear stress. Tu et al. [
15] used FEA to analyze the bending stress distribution of involute cylindrical gears at different meshing positions and obtained the variation law of tooth root bending stress during the meshing process. Provided a certain theoretical basis for the optimization design of gears, Xue et al. [
16] proposed an algorithm for gear bending strength analysis based on the equal geometry method, which realized the equal geometry analysis of the gear plane structural mechanics performance. By creating up a new and effective method for calculating the strength of gears, Cui [
17] solved the meshing line, curvature, and sliding rate of the conjugate tooth profile of the gear by designing the tooth profile of the gear cutter as a sine curve; in addition, the bending strength of the tooth root via finite element analysis was analyzed. The results showed that its curvature and sliding rate were smaller than those of involute tooth profiles, and the bending strength of the tooth root was smaller than that of the involute gears, thus providing a way through which to improve the bending strength of gears. Li [
18] took a certain type of external meshing high-pressure aviation fuel gear pump as the research object, derived the theoretical strength verification calculation formula and verification process of the gear, and used the finite element method to simulate the dynamic meshing process, static contact stress, and static bending stress of the gear. When comparing the three simulation results with the theoretical verification results, it is shown that this simulation technology can effectively achieve stress simulation analysis of this type of pump, and has certain engineering practical significance for the design and simulation research of the new generation aviation engine main supply pump.
Xianbo [
19] systematically summarized the design methods and experimental results of high-tooth gears. Fang [
20] conducted extensive comparative analyses and experiments on high-tooth gears and standard gears (discovering the advantages of high-tooth gears in reducing dynamic load and improving load-bearing capacity), and proposed a design method for high-tooth gears. Zhuang [
21] studied the design and application of high-tooth gears and proposed that the main feature of high-tooth gears is that they have a larger contact ratio, which is mainly achieved by selecting a higher addendum coefficient and a smaller pressure angle than the standard gear. Li [
22] used mathematical programming and finite element methods to study the strength of high-tooth gear transmission through extensive theoretical and experimental analyses. However, there has not been much research on the strength calculation of high-coincidence gears. Pedersen [
23] minimized the bending stress at the root of involute gears by directly optimizing the shape of the gear, and then used the optimized shape to find cutting tools that can achieve this optimized shape. A simple and flexible root parameterization method was adopted, and the importance of separating tooth profile parameterization from stress finite element analysis was emphasized, which greatly improved the stress state of the gears. Bai et al. [
24] analyzed the high-tooth transmission in a certain transmission through ROMAX and conducted optimization and simulation analysis on the gear tooth profile, which played a certain role in the design and application of high-tooth transmission. However, the study did not discuss the strength of high-tooth gears. Li et al. [
25] conducted strength calculations and dynamic research on a high-fit planetary gear transmission system, providing a theoretical basis for the selection of transmission system operating conditions and gear parameters. Raut [
26] analyzed the experimental research on the effects of tooth tip, backlash, and convex tooth profile modifications regarding the vibration characteristics of spur cylindrical gear pairs. Experiments have shown that geometric parameters and their optimized combinations play an important role in the dynamic response of spur gear pairs. Linear-tooth crown convex tooth profile modification is the parameter that has the greatest impact on the vibration characteristics of gear pairs, and an increase in the backlash level will reduce the vibration response.
Concli [
27,
28] used numerical statistical methods to study the influence of gear parameters such as pressure angle, normal modulus, and the profile shift coefficient on the constant correction coefficient
. By changing 3 parameters, 27 gear shapes were designed and calculated via FEA. Research has shown that the only design parameter that affects
is the profile shift coefficient. Wang [
29] proposed a basic step and method for designing a high-coincidence internal spur gear pair with an arc contact trajectory. Based on experiments and FEA, the influence of design and modification parameters on gear transmission was investigated, and the advantages of high-coincidence gears in terms of load-bearing capacity were verified. Research has found that increasing the deformation angle and tooth tip coefficient appropriately is beneficial for reducing bending stress and contact stress. Concli [
30] evaluated the accuracy of different criteria that are used for actual mechanical components. Based on five different standards, experimental methods and FEA were used to measure and calculate the STBF structures of two gear shapes, and the numerical results were compared with the experimental results. Flek [
31] proposed a method of using analytical calculations to approximate gear stiffness modeling. To validate the analytical model used, five different gears were created, and their stiffness curves were determined based on their geometric shapes. Finally, FEA was conducted in Abaqus CAE to determine the applicability of using analytical models to determine the meshing stiffness of gear transmissions. Fontanari [
32] studied the effects of porosity and microstructure on the root bending fatigue of small modulus spur gears created by powder metallurgy. Analysis found that fatigue strength is mainly determined by the hardness of the largest near-surface defects and the softest microstructure components. Due to the complex shape of the critical hole, it was found that its maximum aperture was the geometric parameter that best reflects its harmful impact on fatigue.
At present, there is relatively little research, both domestically and internationally, on high-tooth gears, and the existing strength calculation standards are also concentrated in the category of low-coincidence gear pairs, without covering the calculation of high-coincidence straight cylindrical gear pairs. At the same time, due to the non-standard parameters of high-tooth gears, most domestic designers estimate and design based on experience or on foreign models of high-tooth gears. As the influence of high-tooth gear shape on strength cannot be ignored, many institutions believe that the load is evenly distributed in the double-tooth meshing area when calculating the strength of a high-tooth gear, which results in imprecise calculation results. Therefore, it is essential to study the accurate calculation method for determining the bending stress at the root of the high-tooth gear pair and to understand how gear parameters affect its strength. This finding plays a critical role in extending the gear’s service life and providing guidance for designing the profile of high-tooth gears. With the continuous deepening of research, high-tooth gears will play a greater role in the field of engineering in the future.
2. Calculation of Root Bending Strength of High-Tooth Gear Pair
For low-coincidence gear pairs, GB3480-1997 and ISO6336 use two methods to calculate the bending strength of the tooth root based on the load acting on the external point and the tooth top of the meshing area of a single pair of teeth. At the same time, the calculation of the tooth shape coefficient and stress correction coefficient is also based on this. However, neither the ISO standard nor the national standard provide a detailed description of the calculation method for the tooth root strength and tooth shape coefficient of high-coincidence gear pairs. By comparing the low-coincidence gear pair, the load is applied to the external points in the meshing area of a single pair of teeth to calculate the tooth root strength. In this paper, the load is applied to the external points in the meshing area of two pairs of teeth in order to calculate the tooth root strength of high-tooth gears.
2.1. Formula for Calculating the Bending Strength of the Tooth Root of a High-Tooth Gear Pair
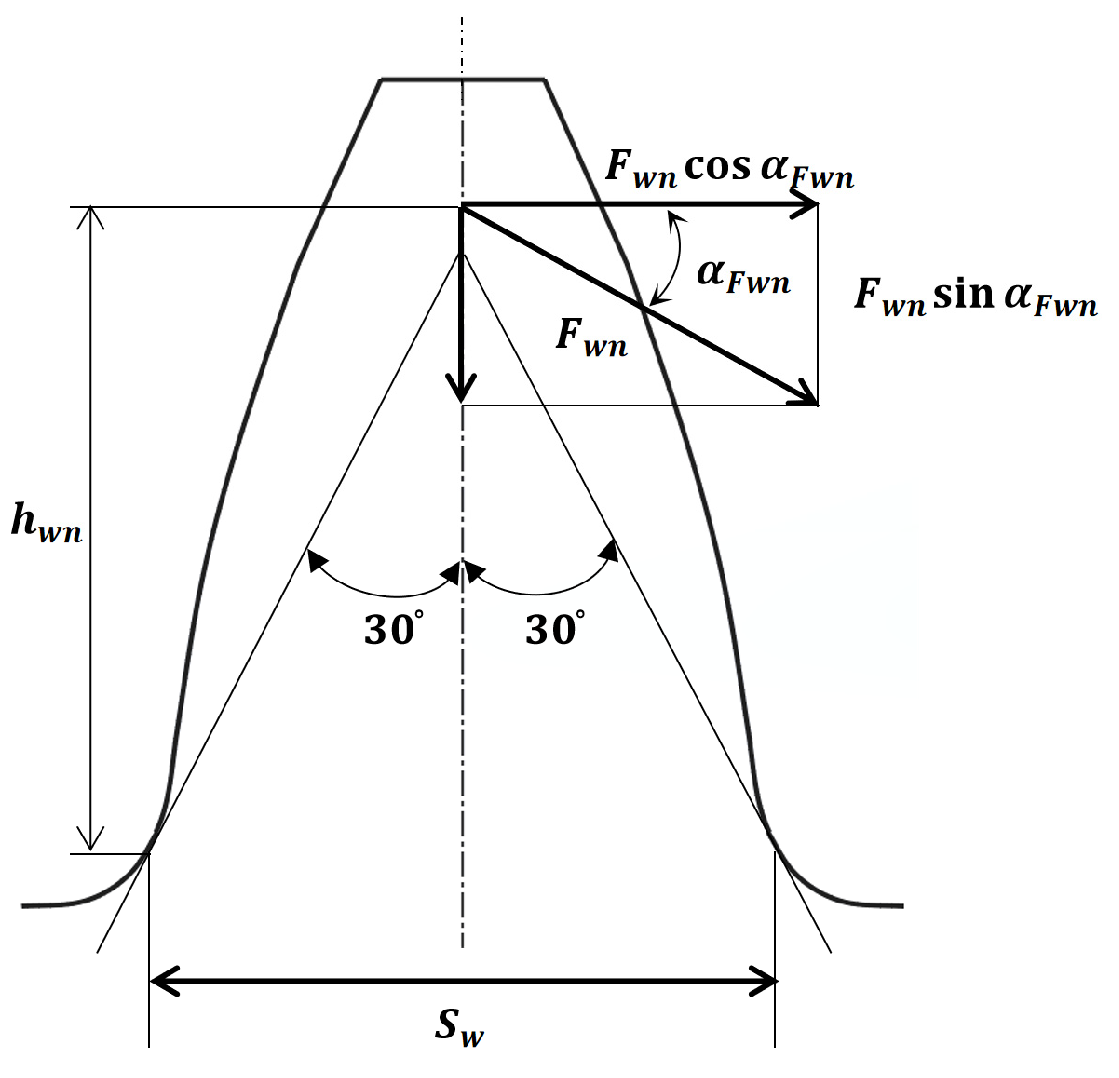
The situation regarding when the normal load
acts on a certain boundary point of the double-tooth meshing area is shown in
Figure 1 (the subscript
n represents various points of the double-tooth meshing area of the high-tooth gear pair, and the same also applies below). In the figure,
is the pressure angle when the load acts on the boundary point position, and this normal load
can be decomposed into two components:
and
. The former generates bending tensile stress
and shear stress
at the dangerous section of the tooth root [
33], while the latter generates compressive stress
at the dangerous section. Therefore, the dangerous section of the tooth root will be subjected to a combination of bending tensile stress, shear stress, and compressive stress.
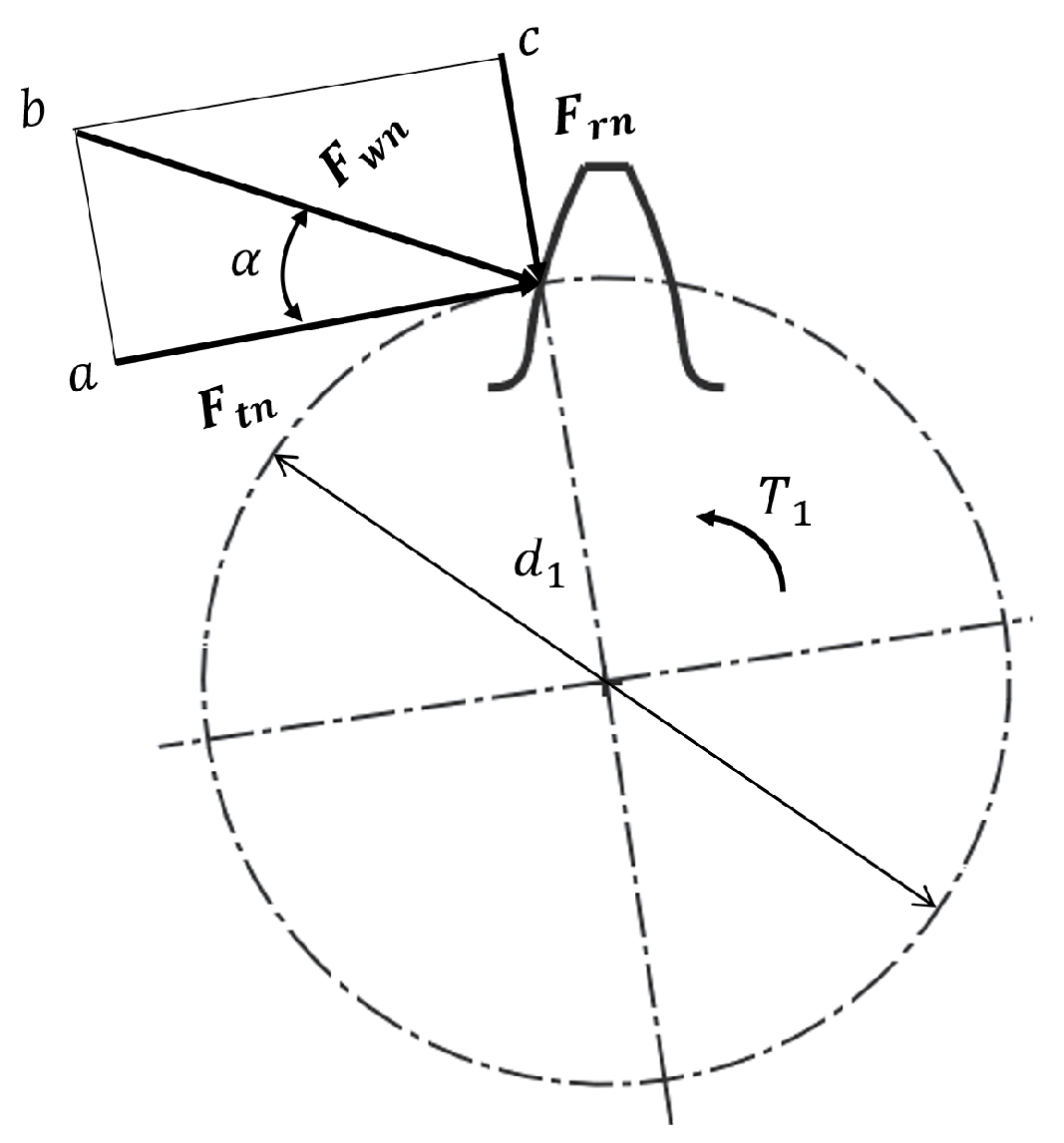
According to
Figure 1 and
Figure 2, the bending tensile stress at the dangerous section of the tooth root can be determined as follows:
where
is the bending force arm at a certain loading boundary point of the high-tooth gear;
is the tooth thickness at the dangerous section of the root of the high-tooth gear; and
is the indexing circle pressure angle of the high-tooth gear.
In
Figure 2,
is the diameter of the indexing circle.
is the torque applied to the gear.
is the radial force, and
is the tangential force.
Transform Equation (1) to obtain:
In the formula,
is the modulus. Define the tooth shape coefficient
at the boundary point of the high-tooth gear; then, obtain the effect of the tooth shape on the nominal bending stress when the load acts on the meshing boundary point of the double-tooth meshing zone.
Therefore, Equation (2) can be simplified as follows:
At present, various existing standards consider different types of stress when calculating the bending strength of tooth roots, resulting in different calculation formulas. According to GB and ISO, shear stress and compressive stress are relatively small, and they mainly consider the root bending stress of the gear teeth under the horizontal force of
; this is then used as the basic stress for calculating the root bending strength. By introducing a stress correction coefficient
, errors caused by ignoring shear stress and compressive stress can be adjusted. For gears with a tooth shape angle not equal to
,
can be approximately calculated according to Formula (5):
where
, the root fillet coefficient is
; and
is the curvature radius at the
tangent point. The calculation formula will be introduced later.
Finally, the calculation formula for the bending strength of various points in the double-tooth meshing area of the high-tooth gear is obtained as follows:
From Equation (6), it can be seen that the bending strength of the tooth root of the high-tooth gear is closely related to the load borne by each pair of teeth in the double-tooth meshing area and the tooth shape coefficient at each meshing boundary point position. The load is borne by each pair of teeth in the double-tooth meshing area being equal to the product of the total load and the load distribution rate , which is between the teeth in the meshing area. Next, we studied the load distribution in the double-tooth meshing area and the three-tooth meshing area of high-tooth gears.
2.2. Calculation of Load Distribution between the Teeth of a High-Tooth Gear Pair
Due to the high degree of contact ratios, double-tooth meshing and triple-tooth meshing were alternated between during the transmission process, and each tooth was affected by multiple parameters. At present, various standards have only studied the load distribution between the teeth of low-coincidence gears, and there is little discussion on the load distribution of high-coincidence gears.
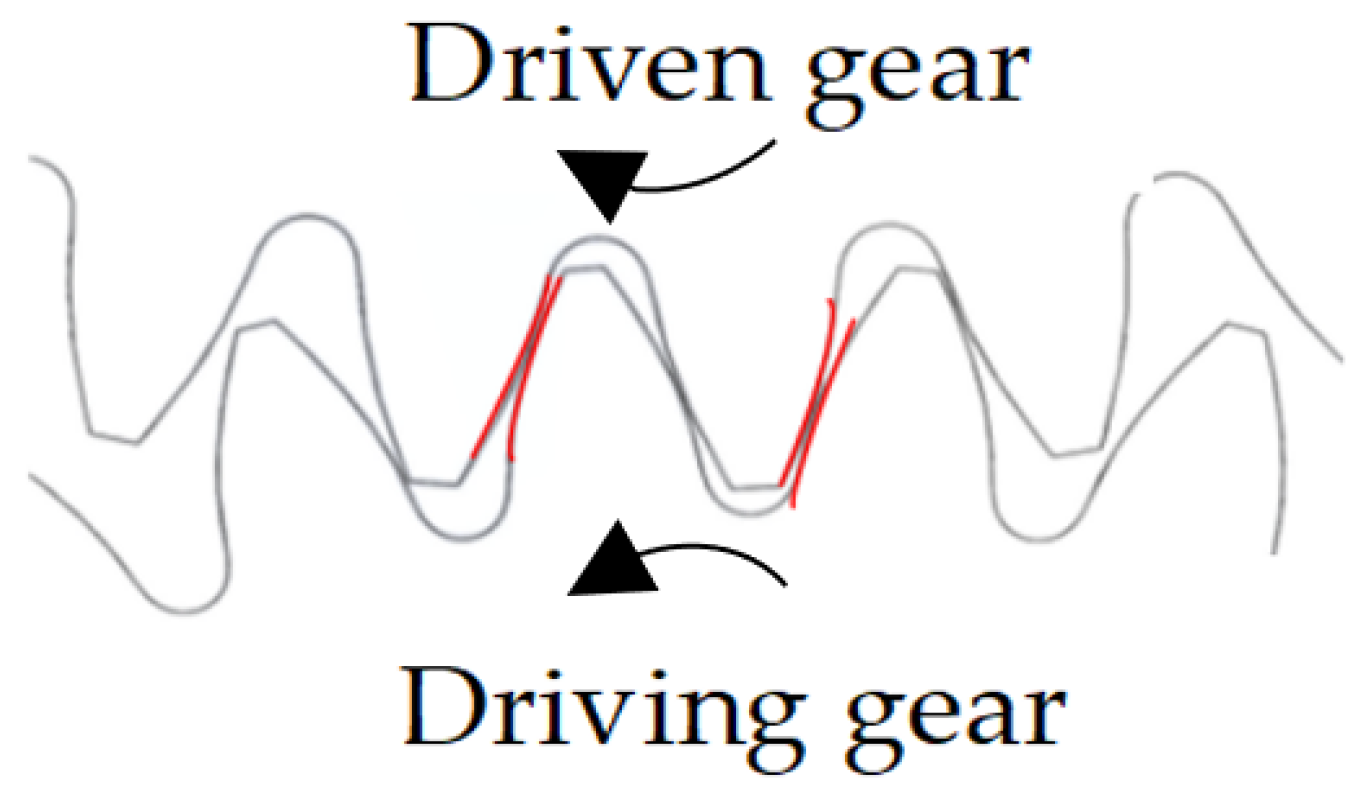
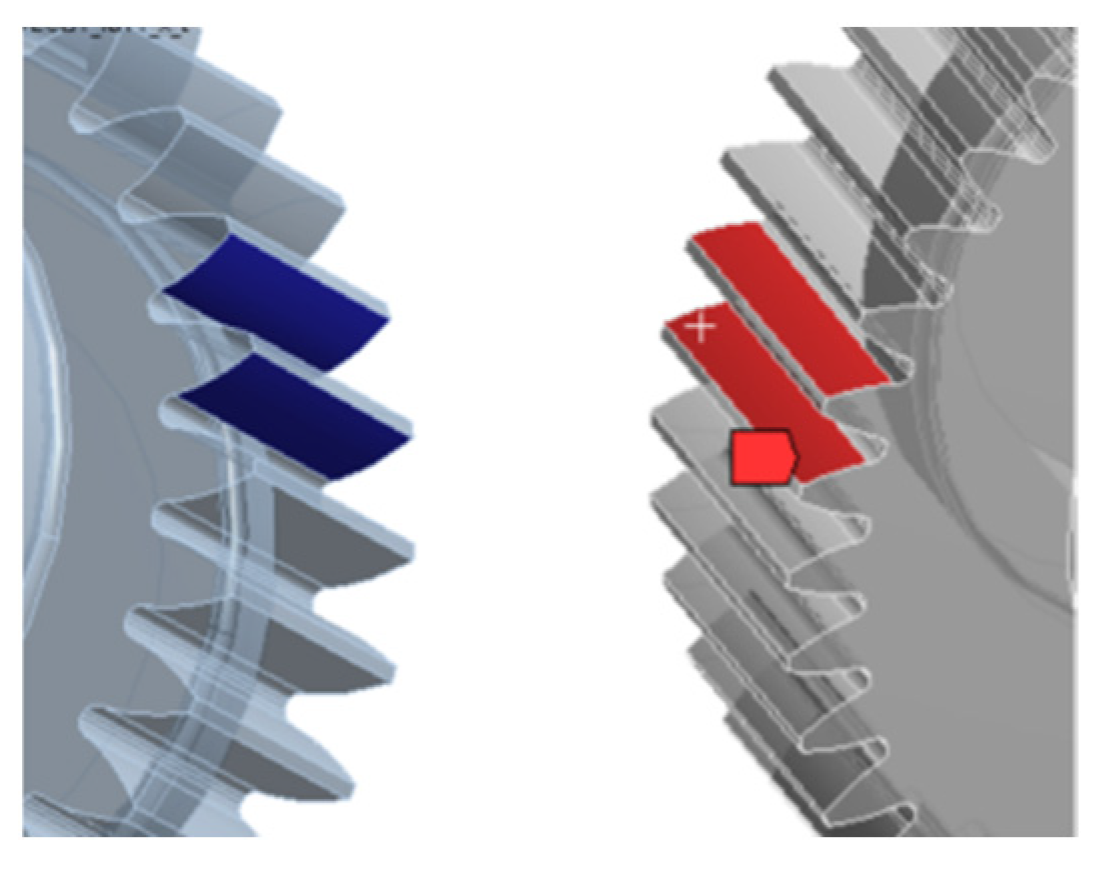
From
Figure 3, it can be seen that the total load
of the high-tooth gear in the double-tooth meshing area is borne by two pairs of high-tooth gear teeth simultaneously. Assuming that these two pairs of gear teeth share the load
and
, respectively, then
In
Figure 3, the teeth marked with red lines represent the double-tooth meshing state.
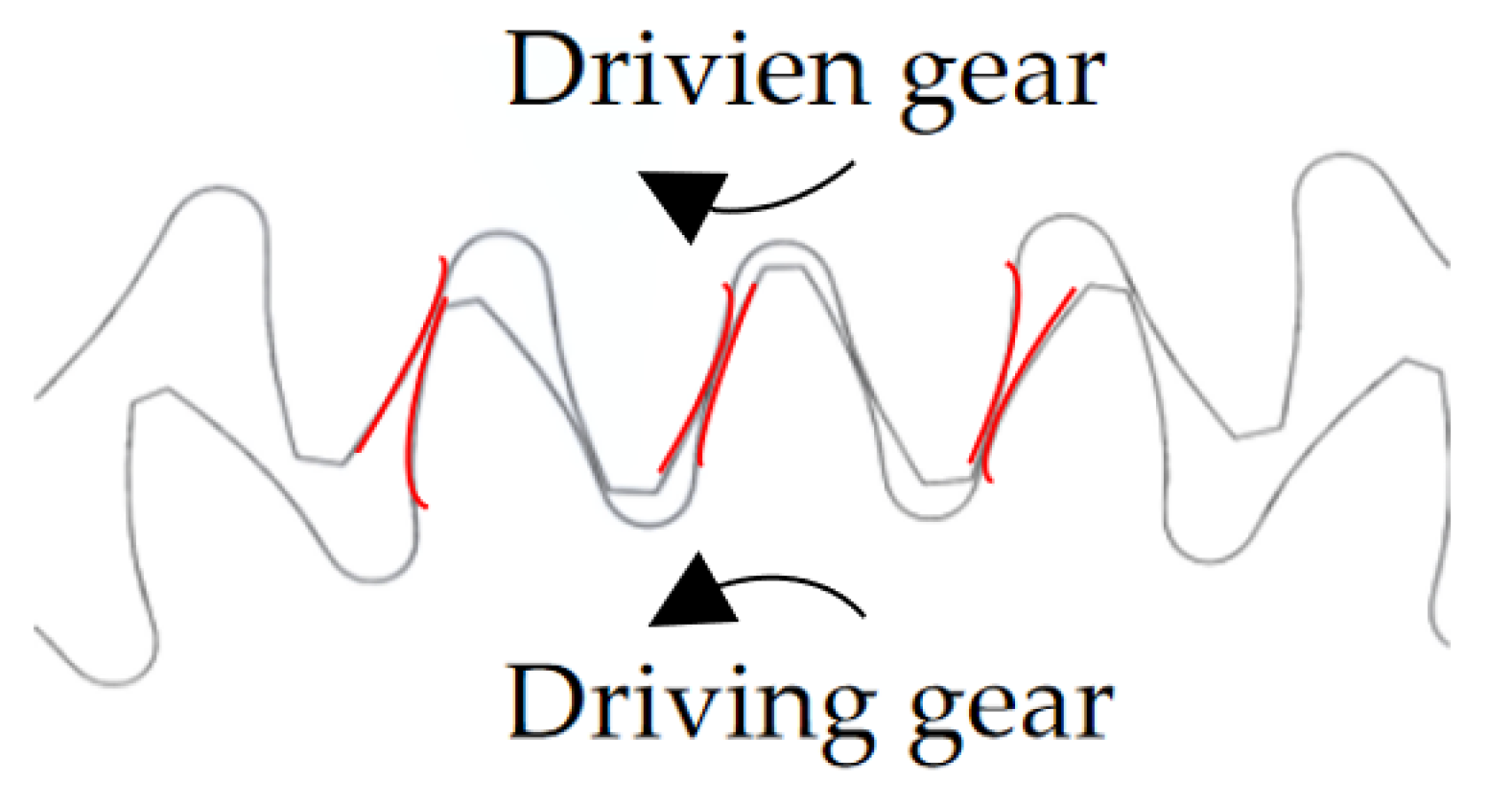
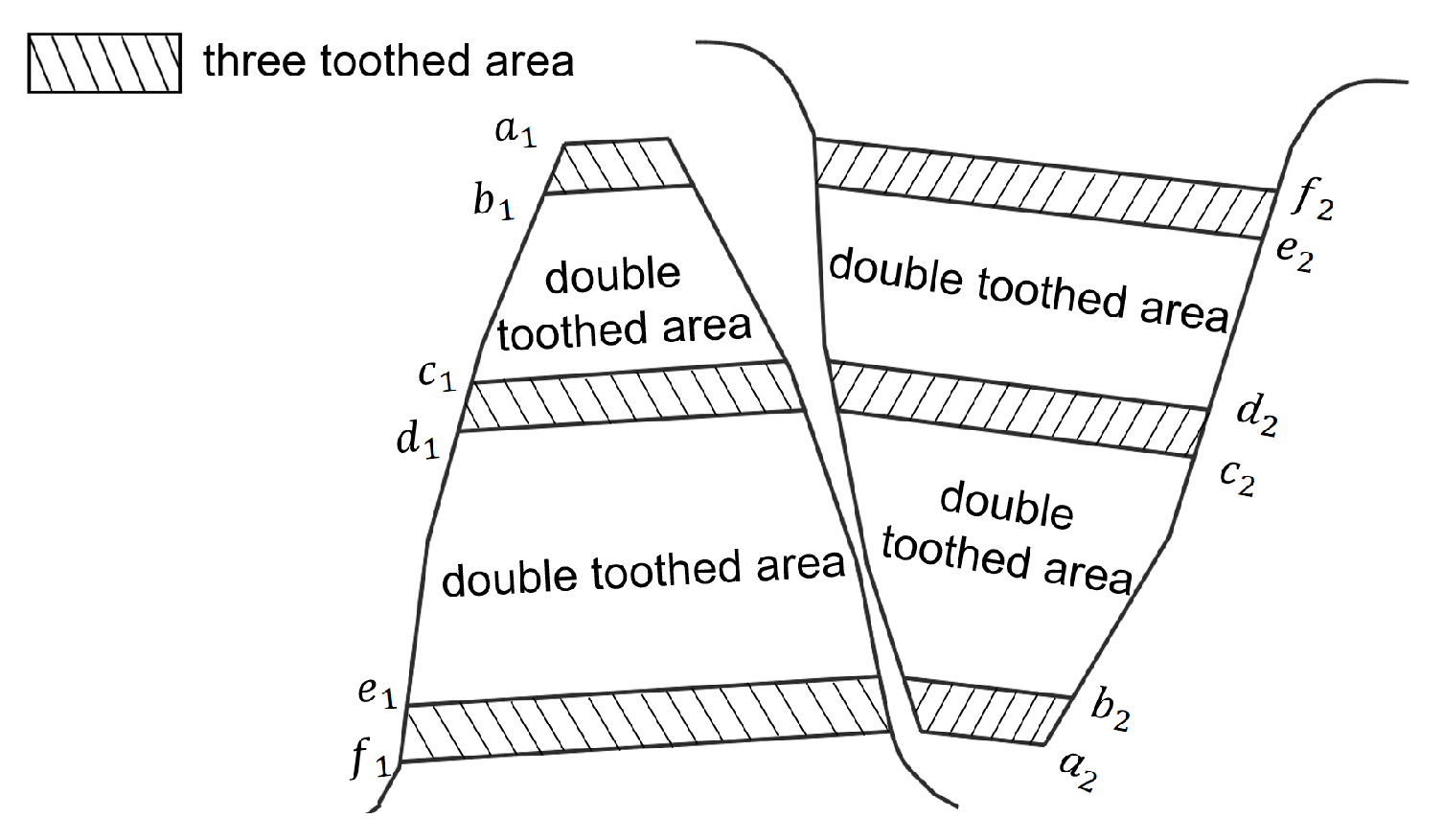
From
Figure 4, it can be seen that the total load
of a high-tooth gear in the triple-tooth meshing area is shared by three pairs of high-tooth gears. Assuming that these three pairs of gear teeth share the load
, and
then
In
Figure 4, the teeth marked with red lines represent the three-tooth meshing state.
Based on ISO standards, the load distribution rate between the teeth in the different meshing areas of high-tooth gears is defined as the percentage of the total load borne by a single-gear tooth in different meshing areas.
Based on ISO standards, the transmission error
in the transmission process of high-tooth gears is defined as the deviation of the actual transmission position of the high-tooth gears from the theoretical transmission position. The expression is as follows:
where
is the load borne by the -th pair of teeth;
is the stiffness of the -th pair of teeth;
is the modification amount of each meshing gear tooth;
is the equivalent meshing error of the base pitch deviation, tooth orientation error, and tooth shape error of the gear.
The total deformation of each pair of gear teeth in different meshing regions should be equal, thus obtaining the gear deformation coordination formula. The deformation coordination formula for high-tooth gears in the double-tooth meshing area is as follows:
Similarly, the deformation coordination formula for high-tooth gears in the triple-tooth meshing area is
The simultaneous use of Equations (7), (8), (10) and (11) can help with calculating the load borne by each pair of teeth in a high-tooth gear in the double-tooth meshing area and the triple-tooth meshing area. According to the definition of the load distribution rate between teeth, the load distribution rate of high-tooth gears in different meshing regions can be obtained.
Based on the above calculation, it can be inferred that the load borne by each pair of teeth in the double-tooth meshing zone is greater than that borne by each pair of teeth in the triple-tooth meshing area. According to the calculation of the bending strength of the low-coincidence gear root, the bending stress of the driving gear (pinion) root is greater than that of the driven gear root. Therefore, by only comparing the driving gears in different meshing regions, the final result is that the tooth root bending stress of the driving gear in the double-tooth meshing region is greater than that in the triple-tooth meshing region.
2.3. Calculation of the Tooth Profile Coefficients at Meshing Boundary Points of a High-Tooth Gear Pair
The processing methods for external meshing gear pairs currently include, in the main, rack tool processing and gear shaping processing. High-tooth gears are processed using rack and pinion cutting tools. This section mainly studies the tooth shape coefficients of various points in the double-tooth meshing area of high-tooth gears, as well as provides the calculation formulas for the tooth shape coefficients at each meshing boundary point.
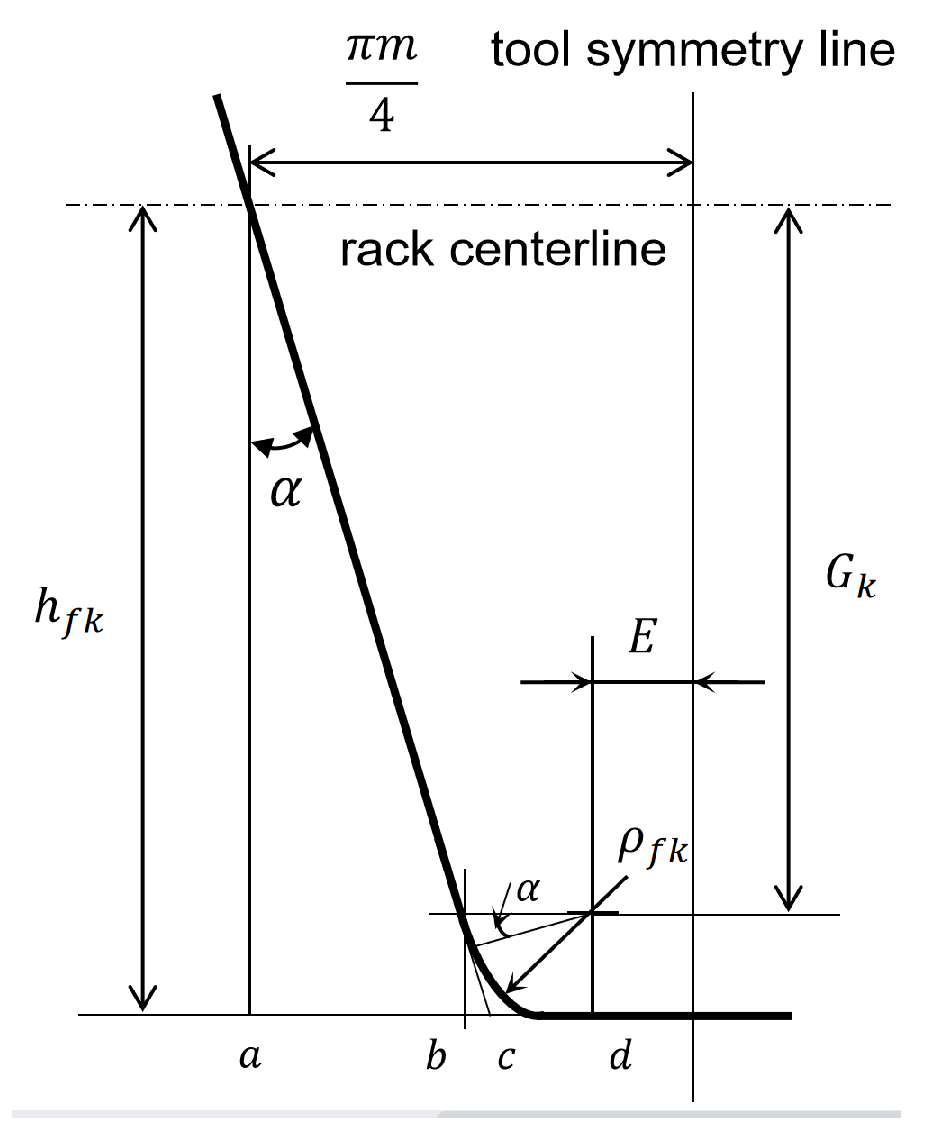
Figure 5 shows the basic tooth profile of the rack tool, where the distance
E from the center of the tool tip to the symmetrical line of the tool is as follows:
By calculating the geometric relationships in
Figure 5, it can be concluded that
where
is the tooth top height of the rack tool (corresponding to the tooth root height before gear modification) and is the radius of the tooth tip fillet of the rack tool.
When introducing the hypothesis coefficient
and auxiliary calculation coefficient
, we can obtain the following:
where
is the radial displacement coefficient and
is the radial displacement.
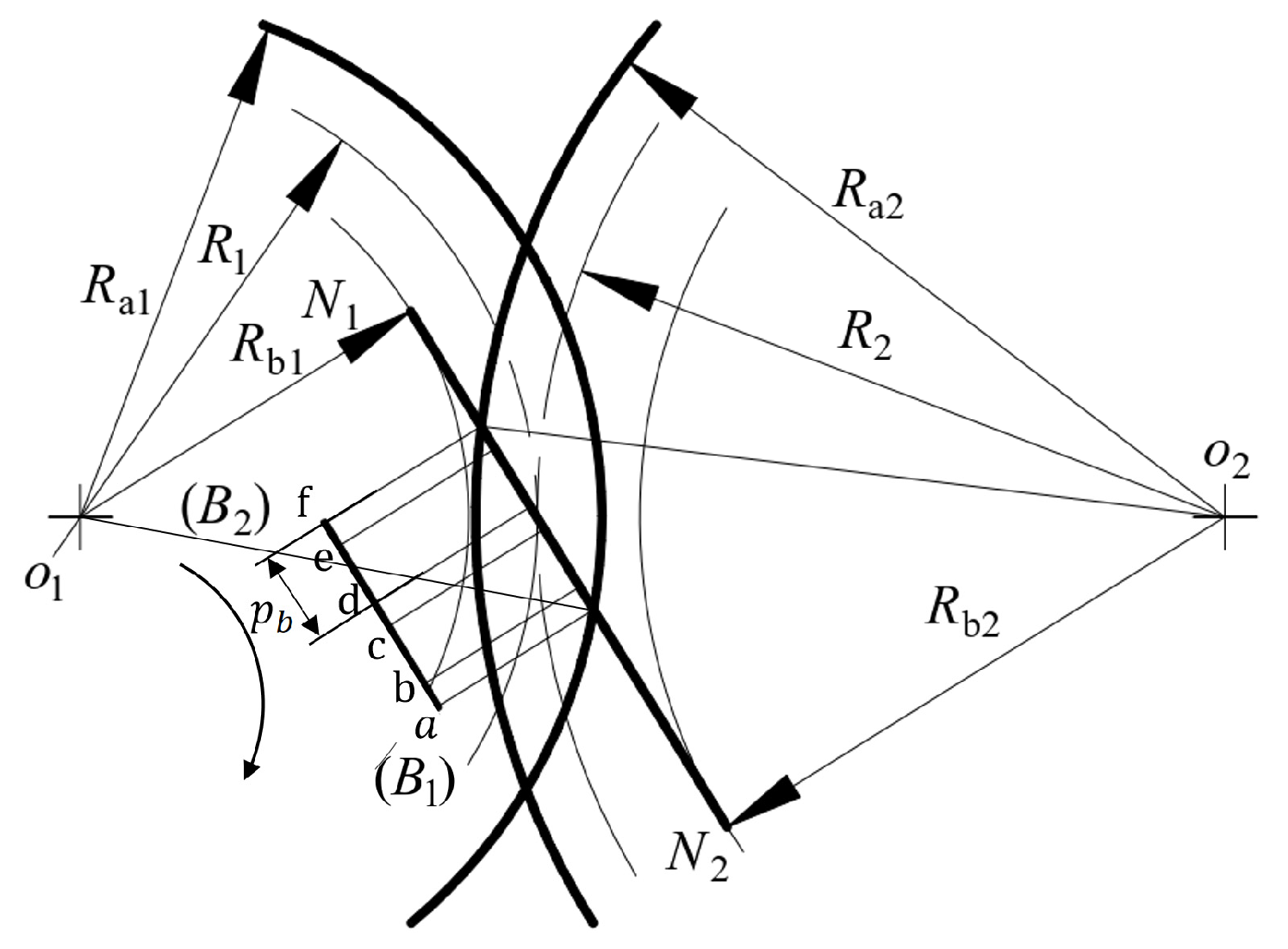
During the transmission process, the high-tooth gear pair will go through a double-tooth meshing zone and a triple-tooth meshing zone, as shown in
Figure 6. The positions of various boundary points in different meshing zones are shown in
Figure 6 and
Figure 7.
In
Figure 6, the high-tooth gear pair enters meshing from
and disengages from meshing from
.
,
,
, and
, which are the boundary points of the double-tooth meshing area, respectively. In
Figure 7,
is the theoretical meshing line length of the high-tooth gear pair;
is the actual meshing line length of the high-tooth gear pair, according to the following definition:
where
is the base circle tooth pitch and
is the contact ratio of the high-tooth gear transmission.
According to geometric relationships, the length of the meshing line at each meshing boundary point is as follows:
The theoretical meshing line length of the driving gear (pinion) is
In
, the diameter of each boundary point of the driving gear in the double-tooth meshing area can be obtained as follows:
The pressure angle corresponding to each boundary point of the driving gear in the double-tooth meshing area of the high-tooth gear pair is
The central angle corresponding to half of the tooth thickness at each boundary point of the driving gear in the double-tooth meshing area of the high-tooth gear pair (approximately calculated by using the arc length formula) is
where
is the half tooth thickness corresponding to the meshing boundary point
.
The end face load angle at each boundary point of the driving gear in the double-tooth meshing area of the high-tooth gear pair is as follows:
According to ISO standards, the auxiliary angle
is introduced to obtain the bending force arm at various points of the driving gear of the high-tooth gear pair as follows:
where the subscript
represents the boundary points
of the double-tooth meshing zone of the high-tooth gear pair. The auxiliary angle
is as follows:
Then, solve
according to Newton’s method and take its initial value as
The formula for calculating the curvature radius
at the tangent point
of the driving gear root of a high-tooth gear pair is
The position of the dangerous section at the tooth root is determined by the
tangent method, which is the plane where the two tangent points connect the symmetrical line of the tooth and form a
and tangent line to the transition fillet of the tooth root, which forms a straight line. This plane is independent of the position of the load application point. Therefore, according to ISO standards, the tooth thickness
of the dangerous section of the tooth root of the high-tooth gear pair can be obtained as follows:
By substituting the parameters of each boundary point in the double-tooth meshing area of the high-tooth gear pair into Equation (3), the tooth shape coefficient of the driving gear can be obtained. Similarly, the tooth shape coefficient of the driven gear can also be obtained.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}