
A Bearing Fault Diagnosis Method Based on Spectrum Map Information Fusion and Convolutional Neural Network



Abstract
:1. Introduction
2. Methods
2.1. VGG Convolutional Neural Network (CNN)
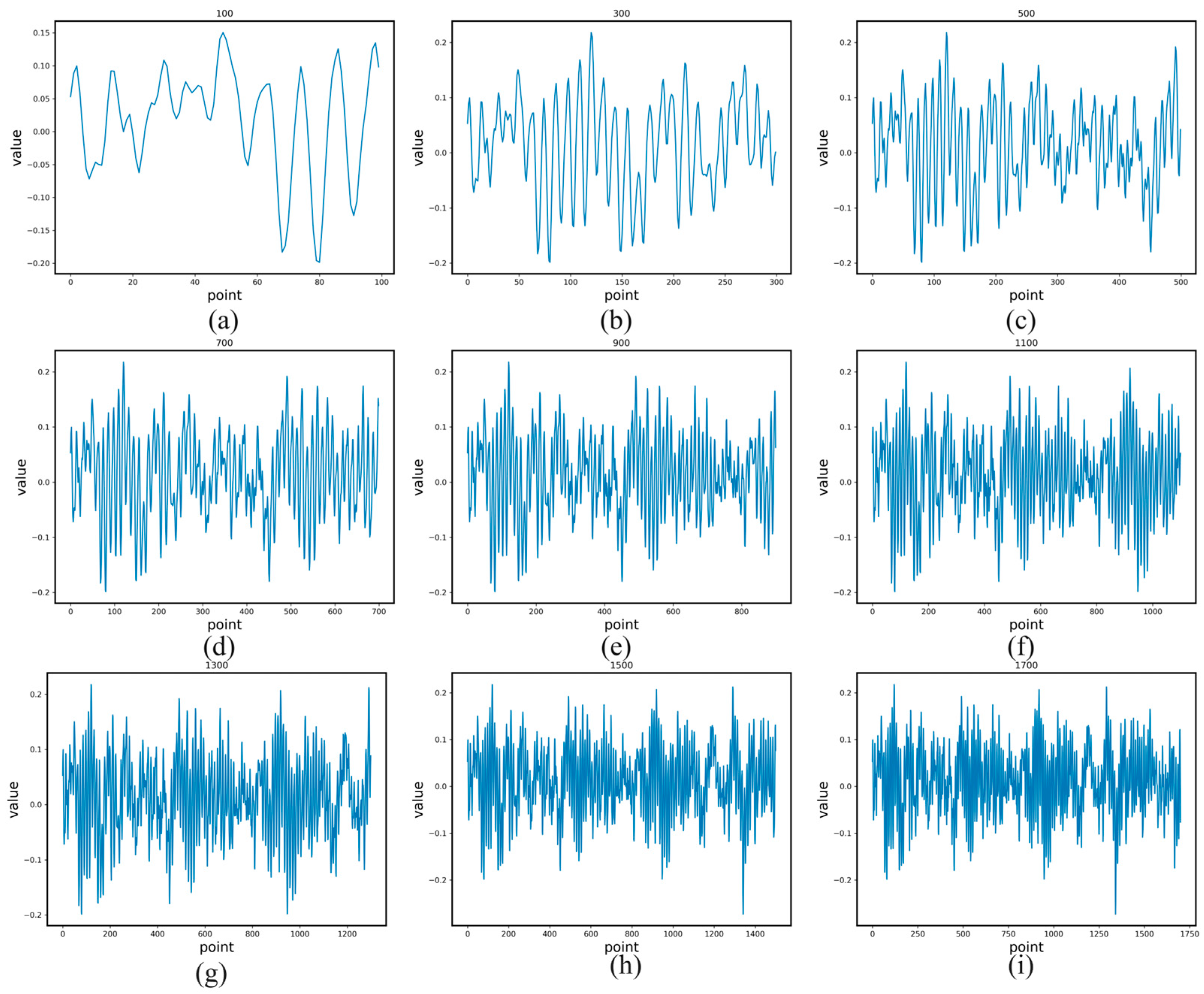
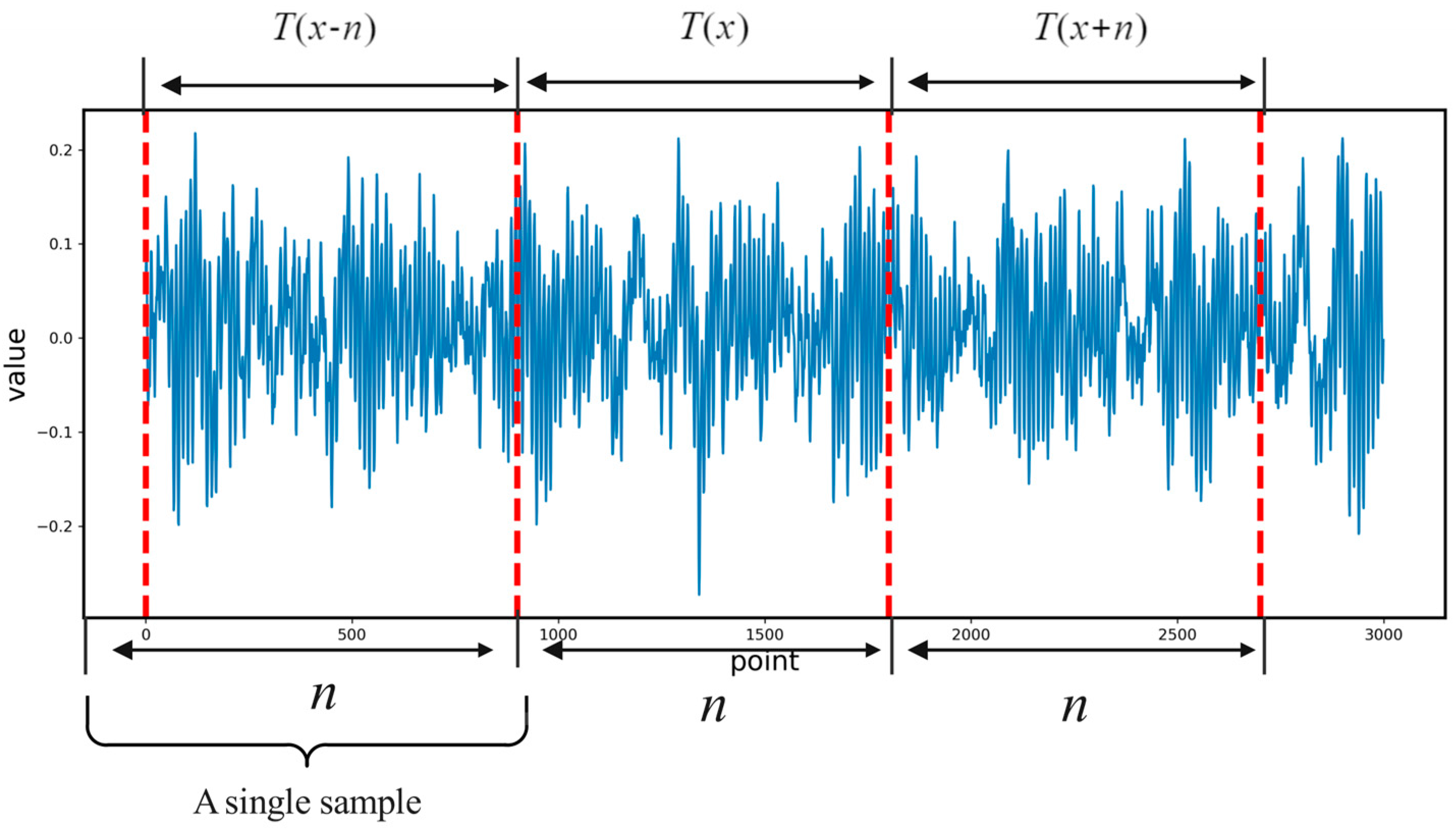
2.2. Data Segmentation
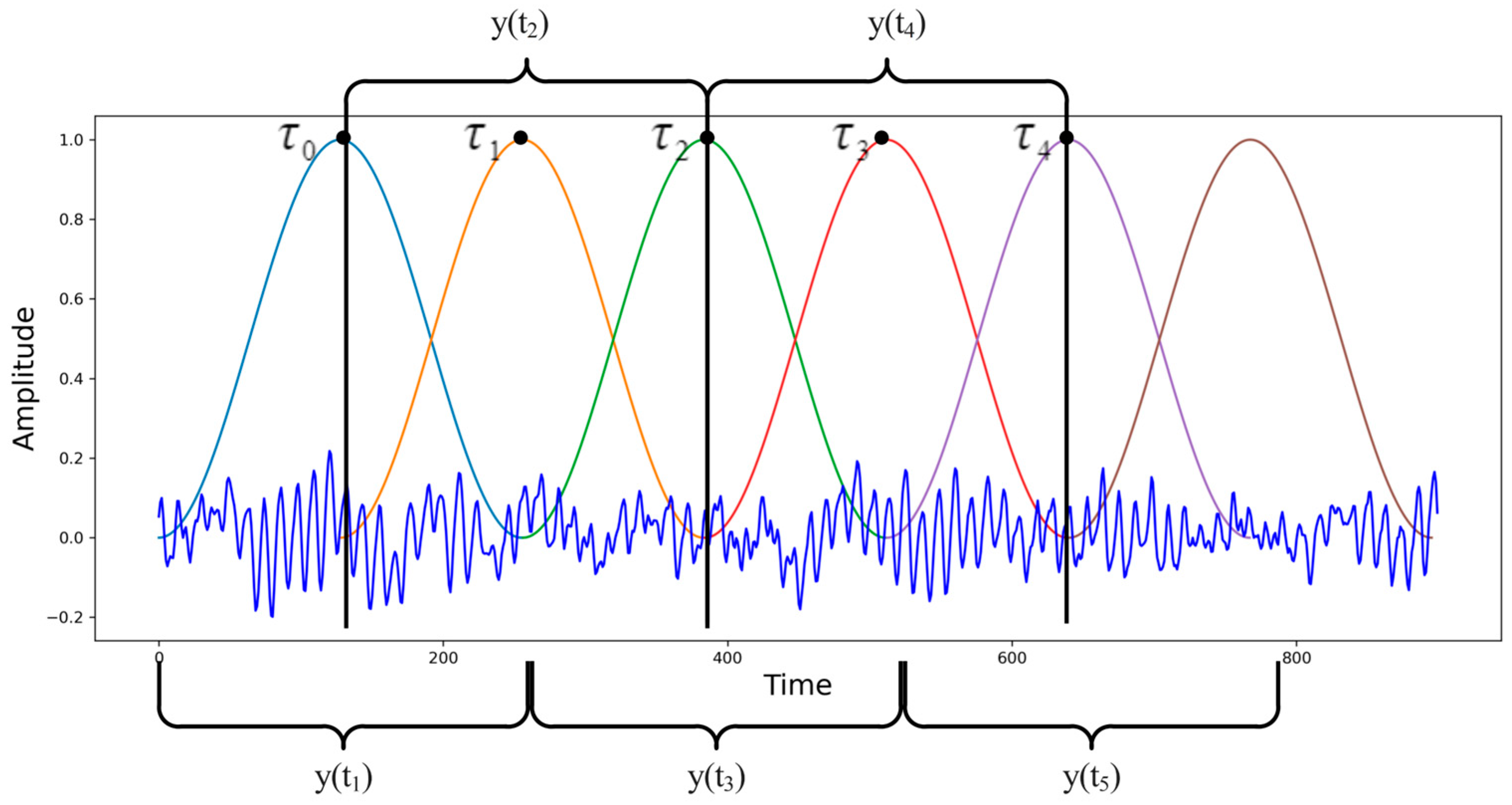
2.3. Spectral Analysis of Short-Time Fourier Transform (STFT)
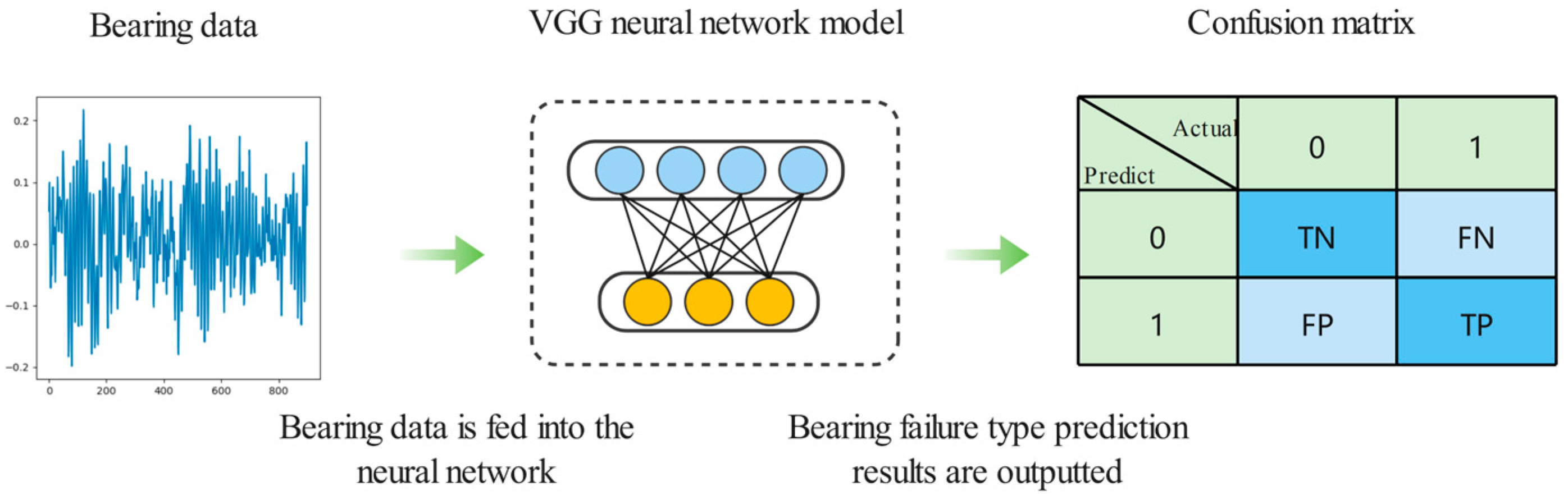
2.4. Diagnostic Methods
- Sensors installed in different locations of the equipment collect vibration signals. In this study, we used collected vibration datasets rather than real-time vibration signals.
- The collected vibration signals are processed, the appropriate length is selected as a sample and 1D data are processed by the STFT method. The processed 1D data are stored as 2D images by Matplotlib. When the dataset is multidimensional, a multichannel dataset is generated by data fusion to improve the recognition accuracy.
- The spectrum map dataset is divided into a training set and a validation set according to a certain proportion.
- Appropriate neural networks are selected for training. Finally, a VGG convolutional neural network is used to train the model on the training set to obtain the neural network prediction model of bearing faults.
- The trained model is deployed to mechanical equipment for fault detection.
3. Dataset
3.1. Dataset 1: Case Western Reserve University (CWRU) Dataset
3.2. Dataset 2: Society for Machinery Failure Prevention Technology (MFPT) Dataset
4. Experiment and Analysis
4.1. Evaluation Index and Method
4.1.1. Loss Function and Accuracy
4.1.2. Confusion Matrix
4.1.3. Clustering Analysis
4.2. CWRU Experiment Results
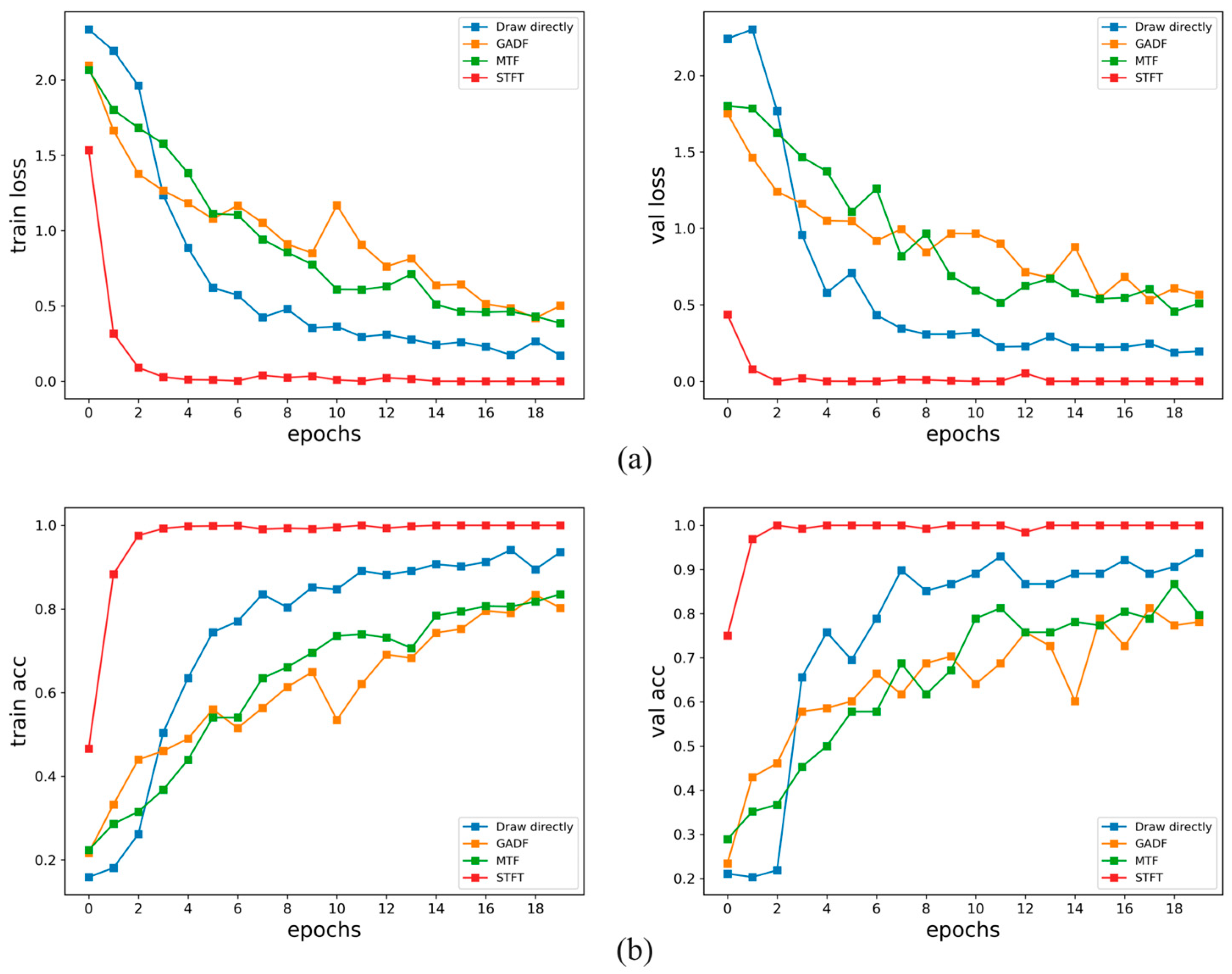
4.2.1. DE Single-Channel Data
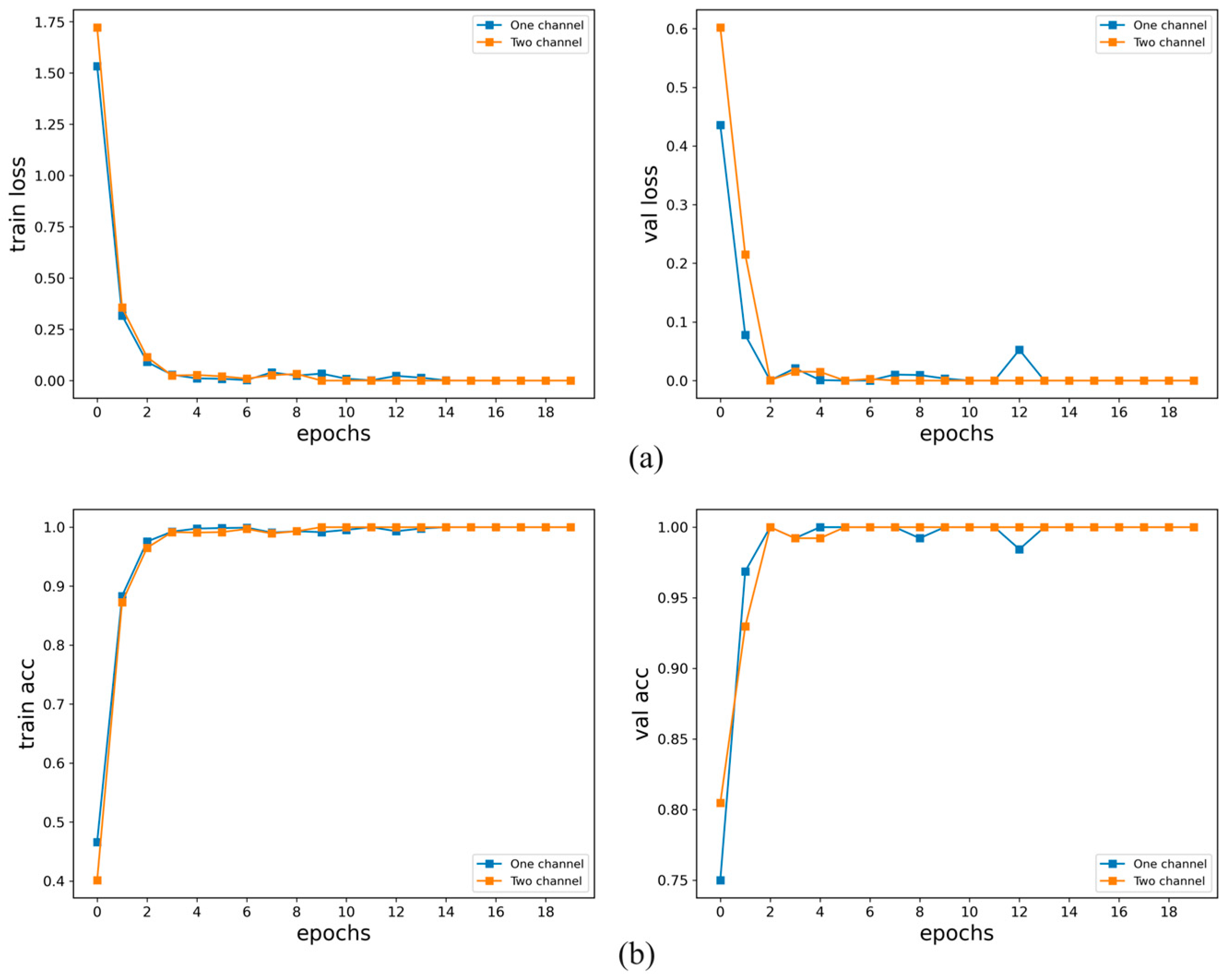
4.2.2. Dual-Channel Data of DE and FE
4.2.3. Evaluation under Different Load Conditions
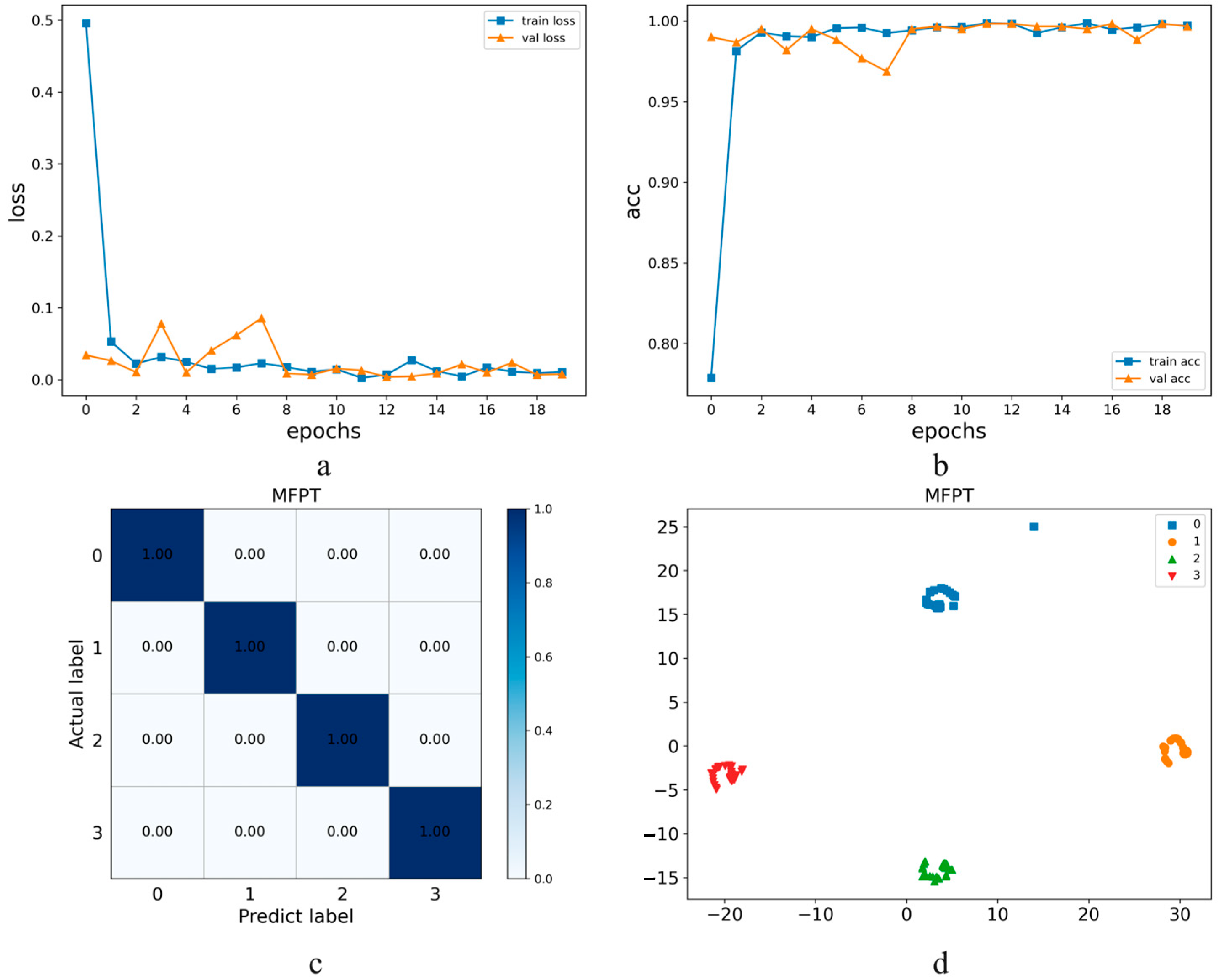
4.3. MFPT Experiment Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shahriar, M.R.; Borghesani, P.; Tan, A. Electrical Signature Analysis-Based Detection of External Bearing Faults in Electrome-chanical Drivetrains. IEEE Trans. Ind. Electron. 2017, 65, 5941–5950. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W. Deep Learning-Based Partial Domain Adaptation Method on Intelligent Machinery Fault Diagnostics. IEEE Trans. Ind. Electron. 2021, 68, 4351–4361. [Google Scholar] [CrossRef]
- Ma, M.; Mao, Z. Deep-Convolution-Based LSTM Network for Remaining Useful Life Prediction. IEEE Trans. Ind. Inform. 2021, 17, 1658–1667. [Google Scholar] [CrossRef]
- Mao, W.; Feng, W.; Liu, Y.; Zhang, D.; Liang, X. A new deep auto-encoder method with fusing discriminant information for bearing fault diagnosis. Mech. Syst. Signal Process. 2020, 150, 107233. [Google Scholar] [CrossRef]
- Cerrada, M.; Sánchez, R.-V.; Li, C.; Pacheco, F.; Cabrera, D.; de Oliveira, J.V.; Vásquez, R.E. A review on data-driven fault severity assessment in rolling bearings. Mech. Syst. Signal Process. 2018, 99, 169–196. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase induction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Liang, X.; Zuo, M.J.; Feng, Z. Dynamic modeling of gearbox faults: A review. Mech. Syst. Signal Process. 2018, 98, 852–876. [Google Scholar] [CrossRef]
- Jin, Y.; Qin, C.; Huang, Y.; Liu, C. Actual bearing compound fault diagnosis based on active learning and decoupling attentional residual network. Measurement 2020, 173, 108500. [Google Scholar] [CrossRef]
- Deng, W.; Yao, R.; Zhao, H.; Yang, X.; Li, G. A novel intelligent diagnosis method using optimal LS-SVM with improved PSO algorithm. Soft Comput. 2019, 23, 2445–2462. [Google Scholar] [CrossRef]
- Deng, W.; Zhang, S.; Zhao, H.; Yang, X. A Novel Fault Diagnosis Method Based on Integrating Empirical Wavelet Transform and Fuzzy Entropy for Motor Bearing. IEEE Access 2018, 6, 35042–35056. [Google Scholar] [CrossRef]
- Glowacz, A. Fault diagnosis of single-phase induction motor based on acoustic signals. Mech. Syst. Signal Process. 2018, 117, 65–80. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, J.; Zheng, Y.; Jiang, W.; Zhang, Y. Fault diagnosis of rolling bearings with recurrent neural network-based autoencoders. ISA Trans. 2018, 77, 167–178. [Google Scholar] [CrossRef] [PubMed]
- Shao, H.D.; Jiang, H.K.; Li, X.Q.; Wu, S.P. Intelligent fault diagnosis of rolling bearing using deep wavelet auto-encoder with extreme learning machine. Knowl.-Based Syst. 2018, 140, 1–14. [Google Scholar]
- Cheng, Y.; Lin, M.; Wu, J.; Zhu, H.; Shao, X. Intelligent fault diagnosis of rotating machinery based on continuous wavelet transform-local binary convolutional neural network. Knowl.-Based Syst. 2021, 216, 106796. [Google Scholar] [CrossRef]
- Deng, W.; Liu, H.; Xu, J.; Zhao, H.; Song, Y. An Improved Quantum-Inspired Differential Evolution Algorithm for Deep Belief Network. IEEE Trans. Instrum. Meas. 2020, 69, 7319–7327. [Google Scholar] [CrossRef]
- Moshrefzadeh, A.; Fasana, A. The Autogram: An effective approach for selecting the optimal demodulation band in rolling element bearings diagnosis. Mech. Syst. Signal Process. 2018, 105, 294–318. [Google Scholar] [CrossRef]
- Qin, Y. A New Family of Model-Based Impulsive Wavelets and Their Sparse Representation for Rolling Bearing Fault Diagnosis. IEEE Trans. Ind. Electron. 2018, 65, 2716–2726. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Lin, Y.; Li, X. A novel method for intelligent fault diagnosis of rolling bearings using ensemble deep auto-encoders. Mech. Syst. Signal Process. 2018, 102, 278–297. [Google Scholar] [CrossRef]
- Hoang, D.-T.; Kang, H.-J. A survey on Deep Learning based bearing fault diagnosis. Neurocomputing 2019, 335, 327–335. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.G.; Guo, L.; Lin, J.; Xing, S.B. A neural network constructed by deep learning technique and its application to intel-ligent fault diagnosis of machines. Neurocomputing 2018, 272, 619–628. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lu, N.; Xing, S. Deep normalized convolutional neural network for imbalanced fault classification of machinery and its understanding via visualization. Mech. Syst. Signal Process. 2018, 110, 349–367. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L. A review of failure modes, condition monitoring and fault diagnosis methods for large-scale wind turbine bearings. Measurement 2020, 149, 107002. [Google Scholar] [CrossRef]
- Kumar, A.; Vashishtha, G.; Gandhi, C.P.; Zhou, Y.; Glowacz, A.; Xiang, J. Novel Convolutional Neural Network (NCNN) for the Diagnosis of Bearing Defects in Rotary Machinery. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Eren, L.; Ince, T.; Kiranyaz, S. A Generic Intelligent Bearing Fault Diagnosis System Using Compact Adaptive 1D CNN Classifier. J. Signal Process. Syst. 2019, 91, 179–189. [Google Scholar] [CrossRef]
- Hoang, D.-T.; Kang, H.-J. Rolling element bearing fault diagnosis using convolutional neural network and vibration image. Cogn. Syst. Res. 2019, 53, 42–50. [Google Scholar] [CrossRef]
- Guo, L.; Lei, Y.; Xing, S.; Yan, T.; Li, N. Deep Convolutional Transfer Learning Network: A New Method for Intelligent Fault Diagnosis of Machines with Unlabeled Data. IEEE Trans. Ind. Electron. 2019, 66, 7316–7325. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ding, Q. Deep learning-based remaining useful life estimation of bearings using multi-scale feature extraction. Reliab. Eng. Syst. Saf. 2019, 182, 208–218. [Google Scholar] [CrossRef]
- Pan, J.; Zi, Y.; Chen, J.; Zhou, Z.; Wang, B. LiftingNet: A Novel Deep Learning Network with Layerwise Feature Learning from Noisy Mechanical Data for Fault Classification. IEEE Trans. Ind. Electron. 2018, 65, 4973–4982. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, H.; Duan, W.; Liang, T.; Wu, S. Rolling bearing fault feature learning using improved convolutional deep belief network with compressed sensing. Mech. Syst. Signal Process. 2018, 100, 743–765. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, H.; Liang, T. Electric Locomotive Bearing Fault Diagnosis Using a Novel Convolutional Deep Belief Network. IEEE Trans. Ind. Electron. 2018, 65, 2727–2736. [Google Scholar] [CrossRef]
- Zhu, Z.Y.; Peng, G.L.; Chen, Y.H.; Gao, H.J. Aconvolutional neural network based on a capsule network with strong general-ization for bearing fault diagnosis. Neurocomputing 2019, 323, 62–75. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014. [Google Scholar] [CrossRef]
- Shao, H.; Xia, M.; Han, G.; Zhang, Y.; Wan, J. Intelligent Fault Diagnosis of Rotor-Bearing System Under Varying Working Conditions with Modified Transfer Convolutional Neural Network and Thermal Images. IEEE Trans. Ind. Inform. 2021, 17, 3488–3496. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, W.; Du, W.; Li, N.; Wang, J. Data-driven fault diagnosis method based on the conversion of erosion operation signals into images and convolutional neural network. Process Saf. Environ. Prot. 2021, 149, 591–601. [Google Scholar] [CrossRef]
- Stéphane, M. CHAPTER 4—Time Meets Frequency. In A Wavelet Tour of Signal Processing, 3rd ed.; Stéphane, M., Ed.; Academic Press: Boston, MA, USA, 2009; pp. 89–153. [Google Scholar]
- Munteanu, M.; Rusu, C.; Vladareanu, L.; Petreus, D.; Rusu, V.; Dobra, M. EKG Analysis Using STFT Phase. In Proceedings of the International Conference on Advancements of Medicine and Health Care Through Technology, Cluj Napoca, Romania, 23–26 September 2009; p. 231. [Google Scholar]
- Wang, X.B.; Ying, T.; Tian, W. Spectrum Representation Based on STFT. In Proceedings of the 13th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Electr Network, Chengdu, China, 17–19 October 2020; pp. 435–438. [Google Scholar]
- Loparo, K. Case Western Reserve University Bearing Data Center, Bearings Vibration Data Sets; Case Western Reserve University: Cleveland, OH, USA, 2012; pp. 22–28. [Google Scholar]
- Machinery Fault Prevention Technology Bearing Data [Online]. Available online: https://mfpt.org/fault-data-sets/ (accessed on 29 May 2022).
- Li, M.; Zhao, Z.; Scheidegger, C. Visualizing Neural Networks with the Grand Tour. Distill 2020, 5, e25. [Google Scholar] [CrossRef]
- Xiao, F.; Chen, Y.; Zhu, Y. GADF/GASF-HOG:feature extraction methods for hand movement classification from surface electromyography. J. Neural Eng. 2020, 17, 046016. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Nor | IR0.007 | B0.007 | OR0.007 | IR0.014 | B0.014 | OR0.014 | IR0.021 | B0.021 | OR0.021 |
|---|---|---|---|---|---|---|---|---|---|---|
| Train | 2196 | 1091 | 1102 | 1097 | 1096 | 1096 | 1095 | 1098 | 1098 | 1102 |
| Val | 243 | 121 | 122 | 121 | 121 | 121 | 121 | 121 | 121 | 122 |
| Label | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|---|
| Normal | IR0.007 | B0.007 | OR0.007 | IR0.014 | B0.014 | OR0.014 | IR0.021 | B0.021 | OR0.021 | |
| Draw directly | 244 | 121 | 123 | 122 | 122 | 122 | 122 | 122 | 122 | 123 |
| 27 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | |
| GADF | 244 | 121 | 123 | 122 | 122 | 122 | 122 | 122 | 122 | 123 |
| 27 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | |
| MTF | 244 | 121 | 123 | 122 | 122 | 122 | 122 | 122 | 122 | 123 |
| 27 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | |
| STFT | 244 | 121 | 123 | 122 | 122 | 122 | 122 | 122 | 122 | 123 |
| 27 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 |
| Method | Train Loss | Val Loss | Train Acc | Val Acc |
|---|---|---|---|---|
| Draw directly | 0.171 | 0.195 | 0.936 | 0.938 |
| GADF | 0.501 | 0.566 | 0.802 | 0.781 |
| MTF | 0.385 | 0.51 | 0.835 | 0.797 |
| STFT | 0.0 | 0.0 | 1.0 | 1.0 |
| Label | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|---|
| Normal | IR0.007 | B0.007 | OR0.007 | IR0.014 | B0.014 | OR0.014 | IR0.021 | B0.021 | OR0.021 | |
| HP 0 | 244 | 121 | 123 | 122 | 122 | 122 | 122 | 122 | 122 | 123 |
| 27 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | |
| HP 1 | 484 | 122 | 121 | 123 | 122 | 122 | 122 | 122 | 122 | 122 |
| 53 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | |
| HP 2 | 484 | 122 | 122 | 121 | 122 | 122 | 122 | 122 | 122 | 122 |
| 53 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | |
| HP 3 | 485 | 123 | 122 | 123 | 122 | 122 | 122 | 122 | 122 | 122 |
| 53 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 |
| HP | Train Loss | Val Loss | Train Acc | Val Acc |
|---|---|---|---|---|
| HP 0 | 0.0 | 0.0 | 1.0 | 1.0 |
| HP 1 | 0.002 | 0.057 | 0.999 | 0.994 |
| HP 2 | 0.0 | 0.0 | 1.0 | 1.0 |
| HP 3 | 0.0 | 0.0 | 1.0 | 1.0 |
| Label | 0 | 1 | 2 | 3 |
|---|---|---|---|---|
| Baseline | Outer-Race Fault | More Outer-Race Faults | Inner-Race Fault | |
| MFPT | 1756 | 1757 | 1021 | 1021 |
| 195 | 195 | 113 | 113 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Feng, G.; Huo, D.; Kang, Y. A Bearing Fault Diagnosis Method Based on Spectrum Map Information Fusion and Convolutional Neural Network. Processes 2022, 10, 1426. https://doi.org/10.3390/pr10071426
Wang B, Feng G, Huo D, Kang Y. A Bearing Fault Diagnosis Method Based on Spectrum Map Information Fusion and Convolutional Neural Network. Processes. 2022; 10(7):1426. https://doi.org/10.3390/pr10071426
Chicago/Turabian StyleWang, Baiyang, Guifang Feng, Dongyue Huo, and Yuyun Kang. 2022. "A Bearing Fault Diagnosis Method Based on Spectrum Map Information Fusion and Convolutional Neural Network" Processes 10, no. 7: 1426. https://doi.org/10.3390/pr10071426