
Multi−Objective Collaborative Optimization Design of Key Structural Parameters for Coal Breaking and Punching Nozzle

Abstract
:1. Introduction
2. Numerical Simulation and Analysis
2.1. Structure and Key Parameters of the Nozzle
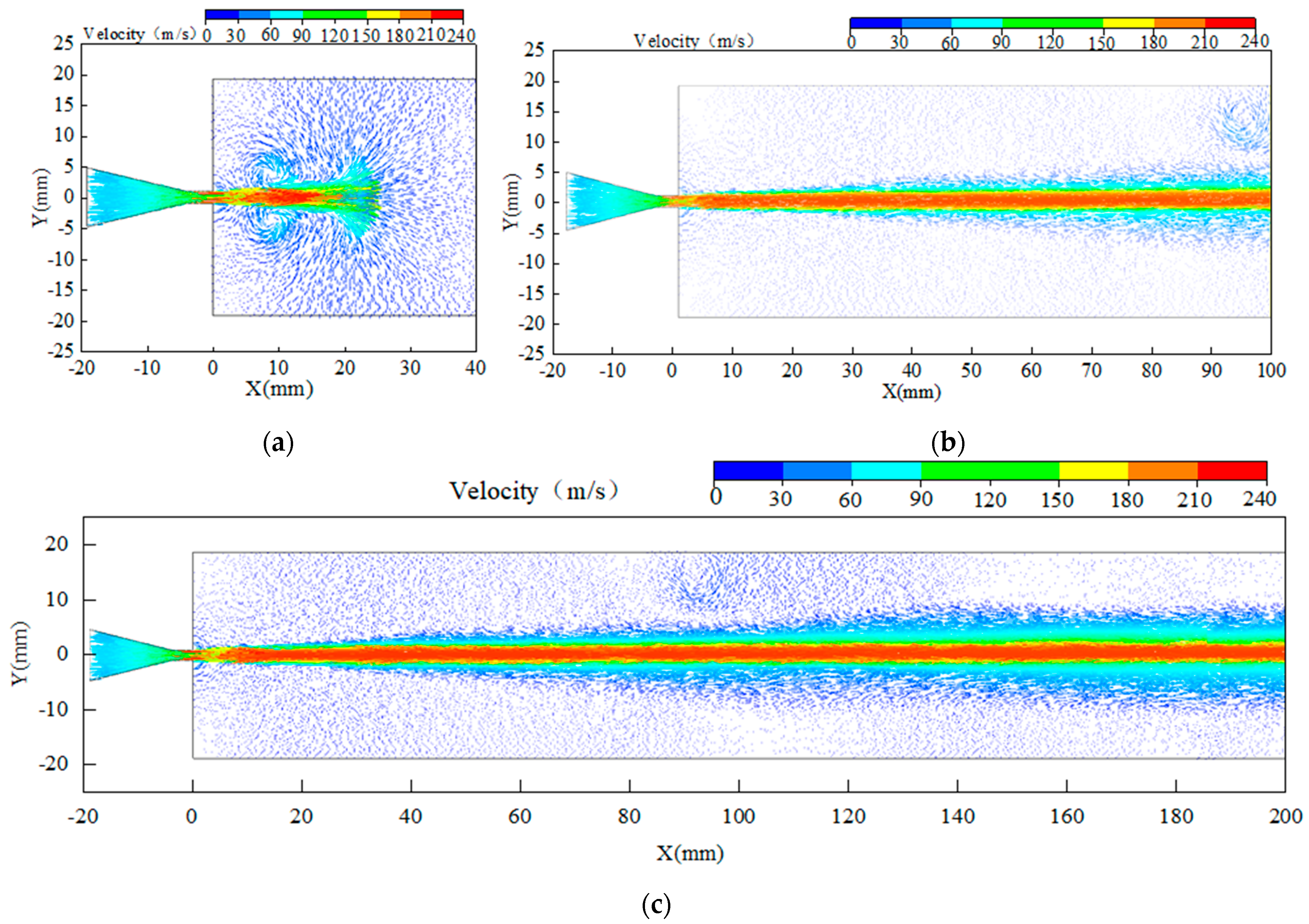
2.2. Numerical Simulation and Boundary Condition
2.3. Model Meshing and Independence Verification
3. Multi-Objective Collaborative Optimization Design and Analysis
3.1. Collaborative Optimization Scheme Design
3.1.1. Multi−Objective Orthogonal Test Matrix
3.1.2. Analysis of Multi−Objective Orthogonal Test Matrix
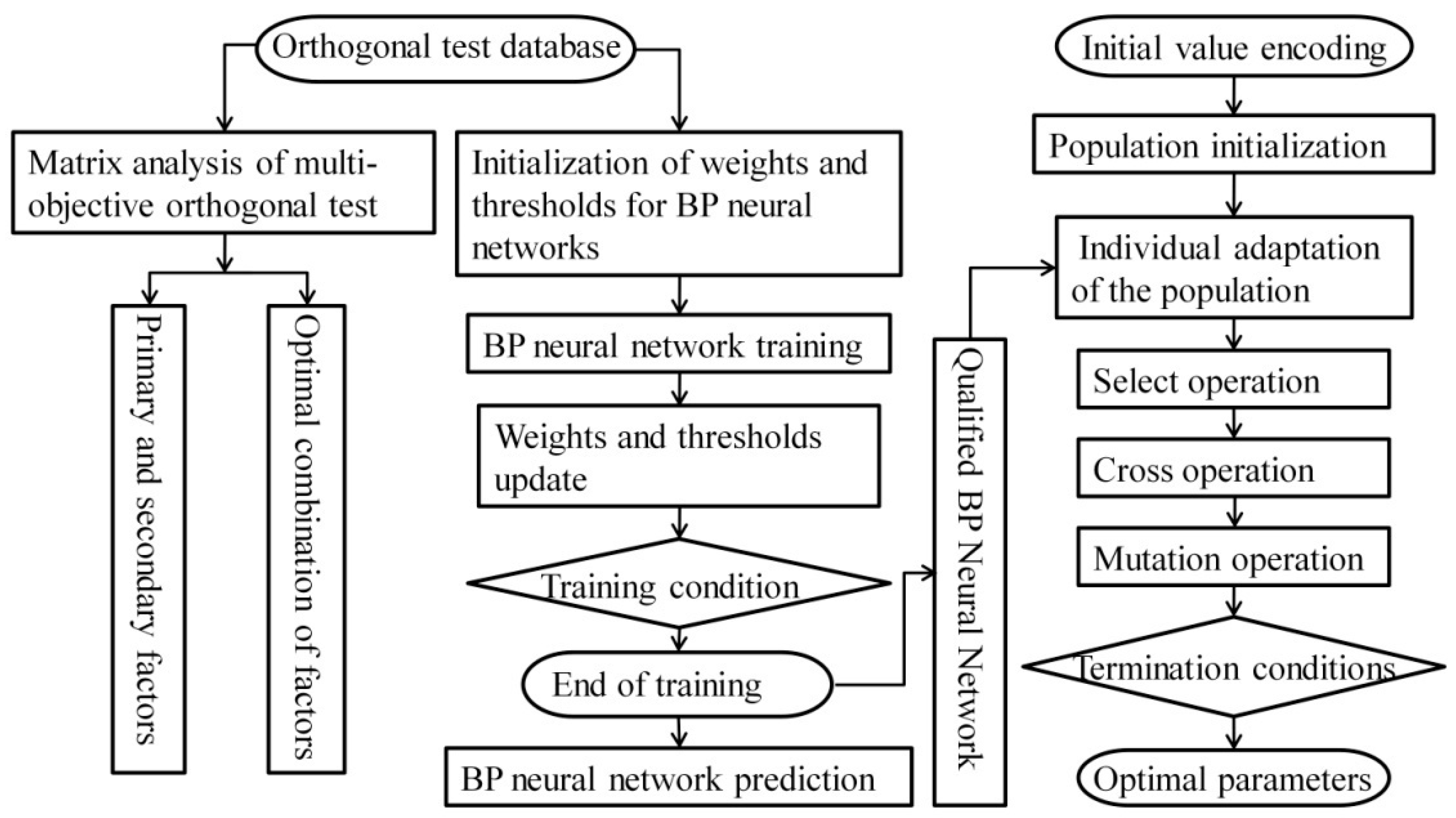
3.2. Multi-Objective Collaborative Optimization
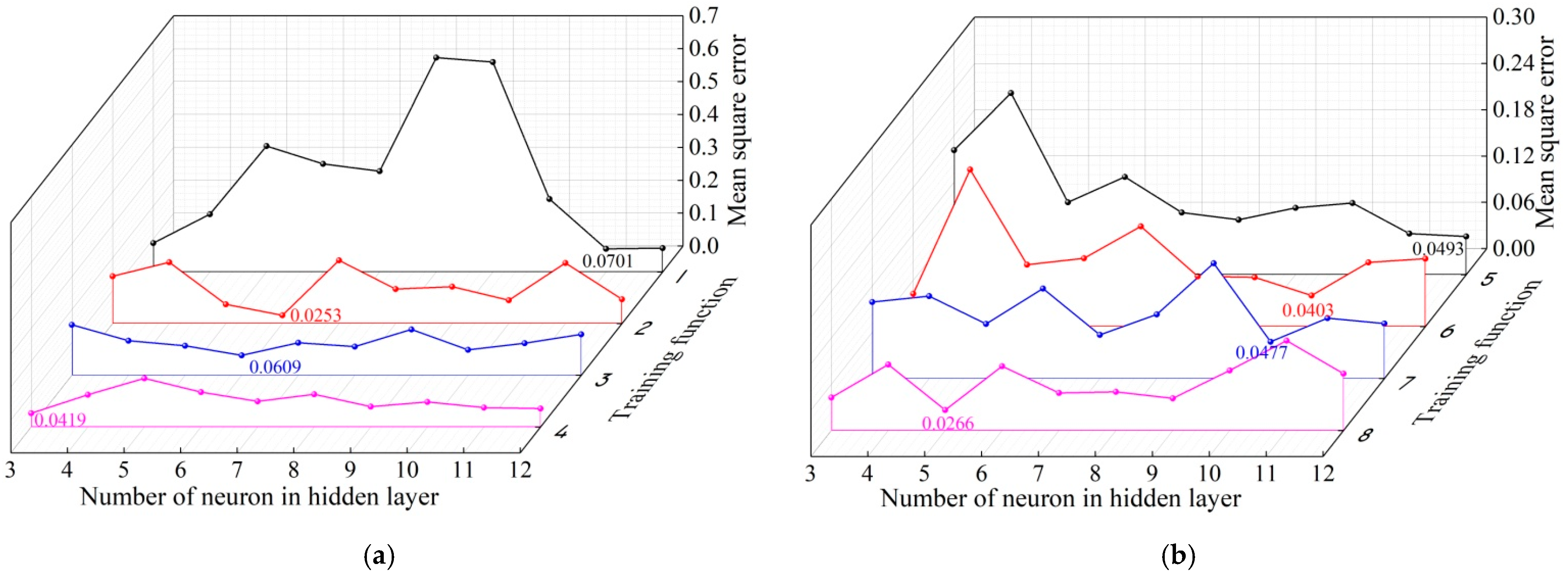
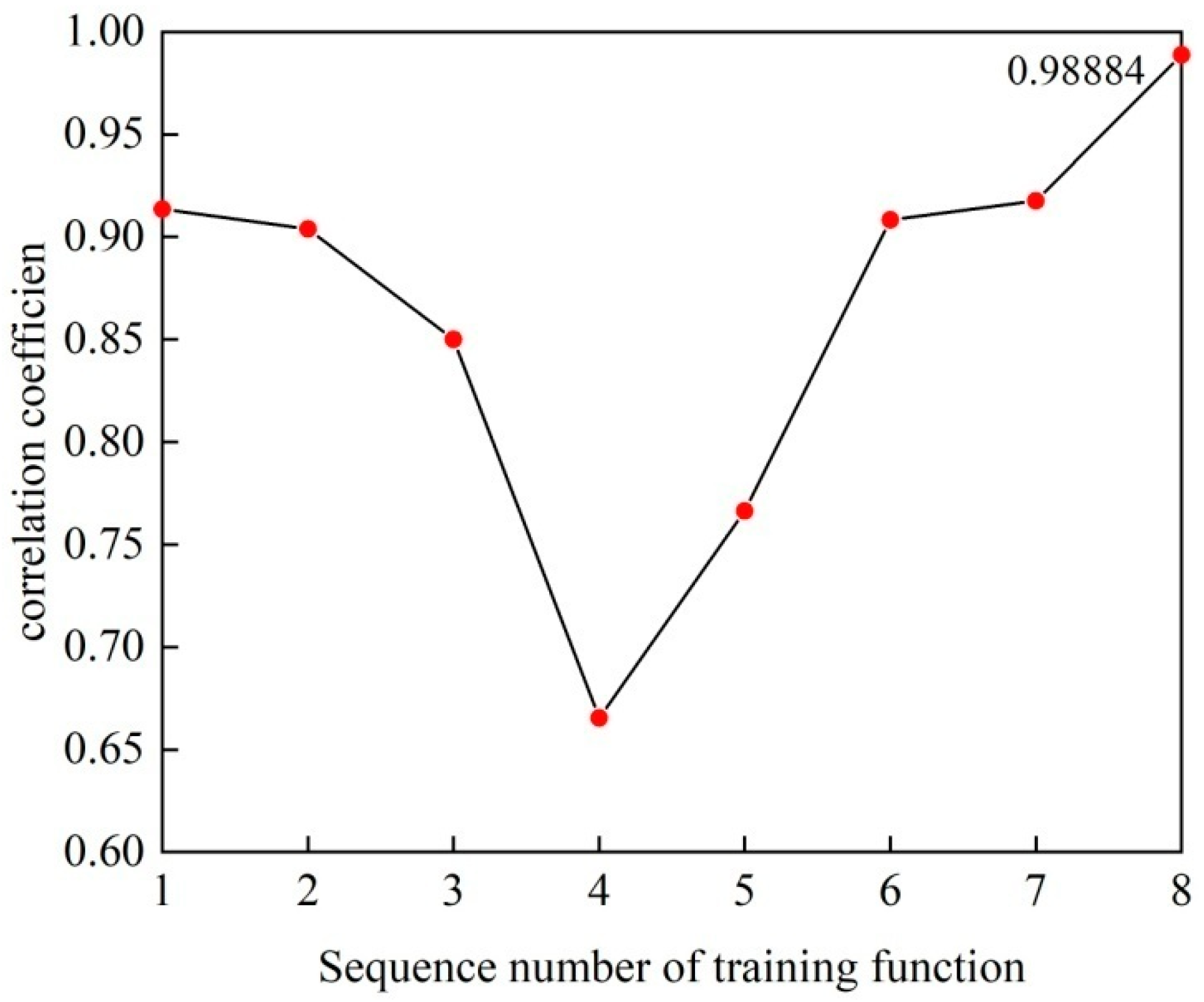
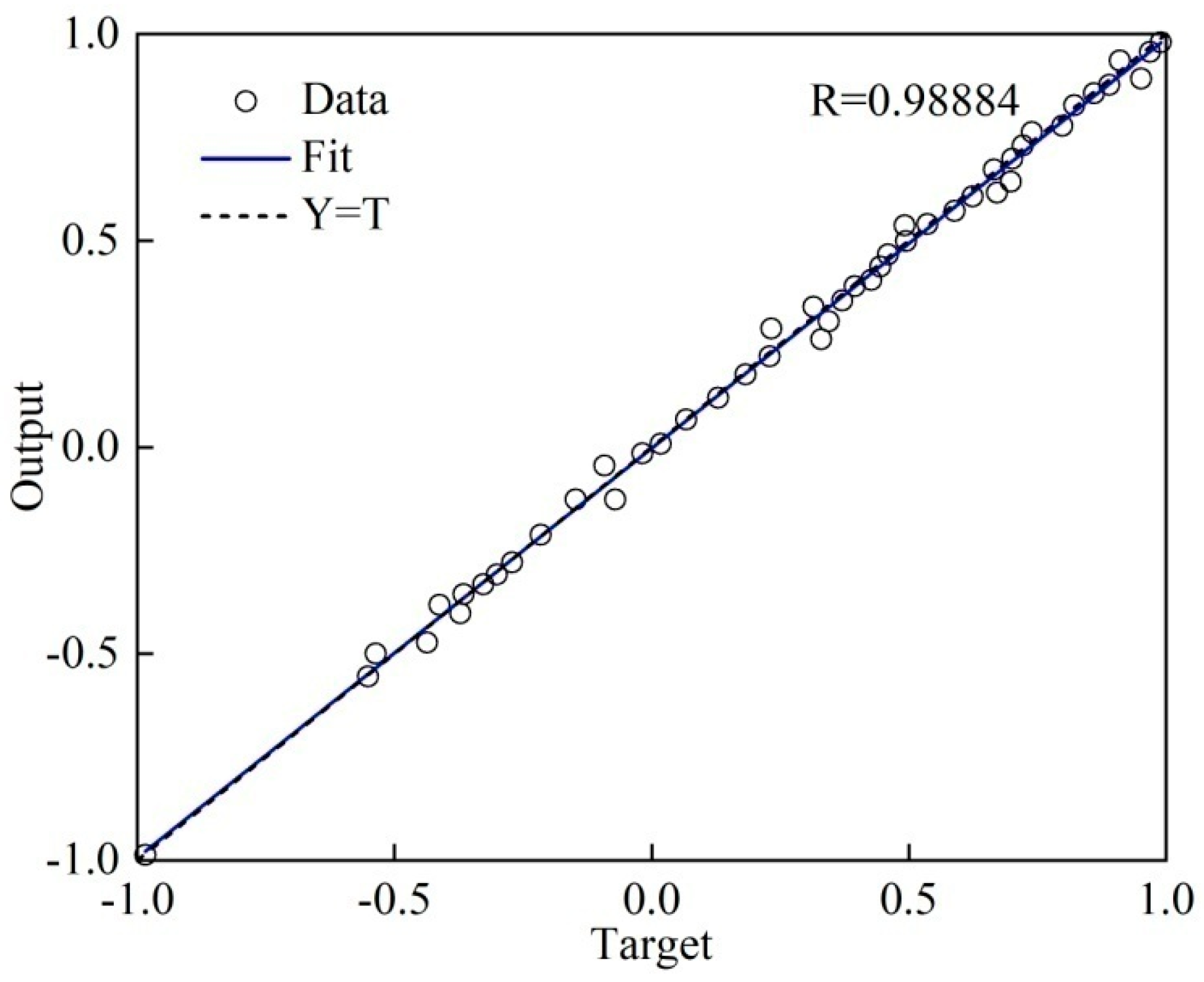
3.2.1. Network Training
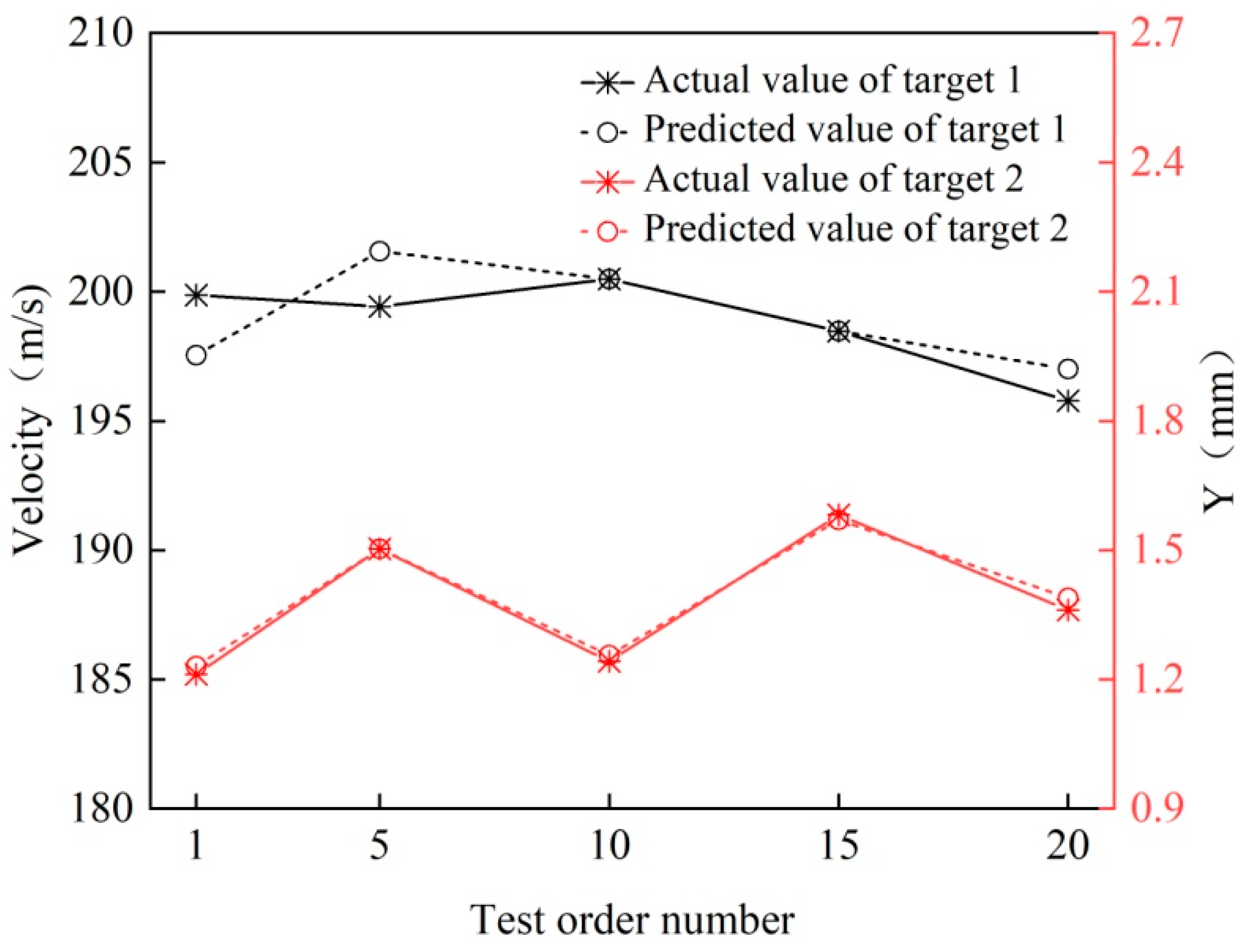
3.2.2. Training Network Analysis and Verification
3.2.3. Optimal Parameter Determination
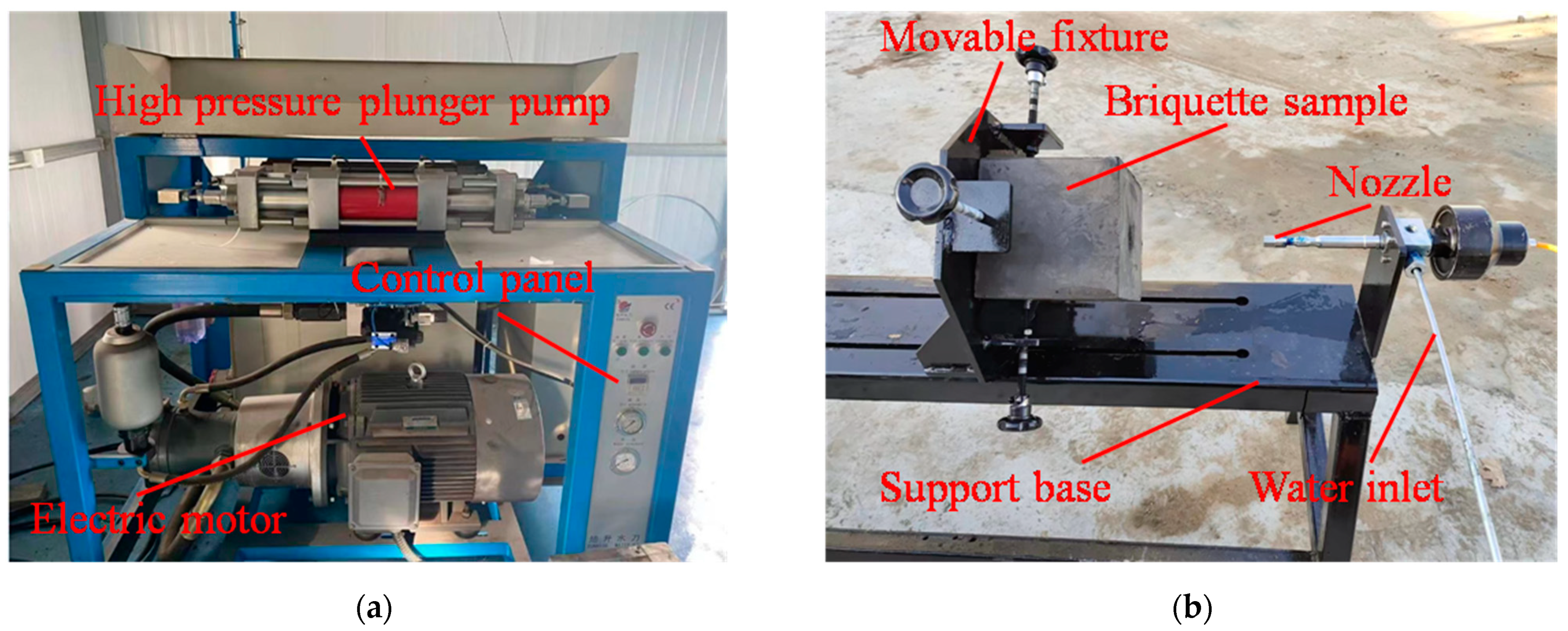
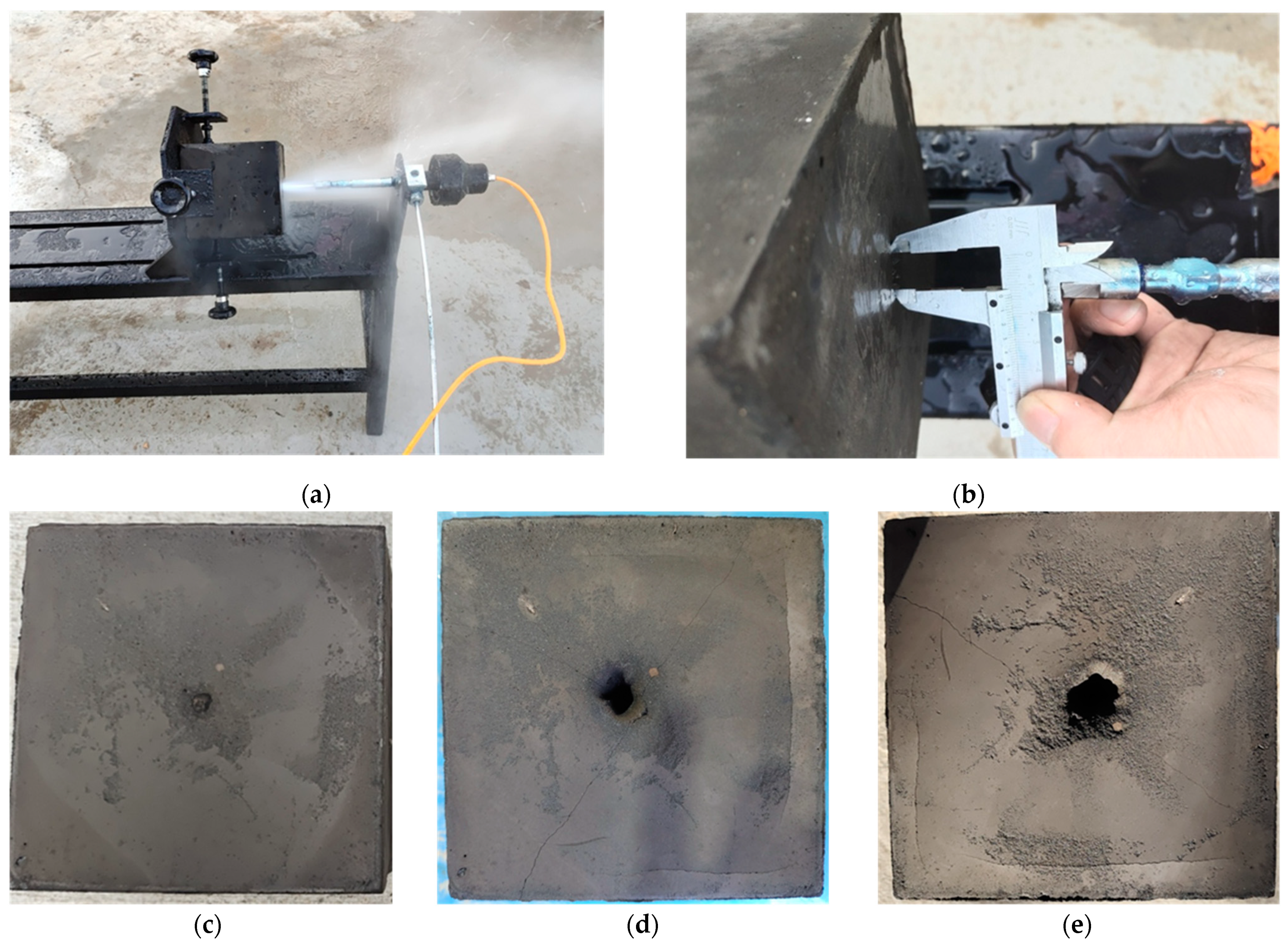
4. Coal Breaking and Punching Experiment
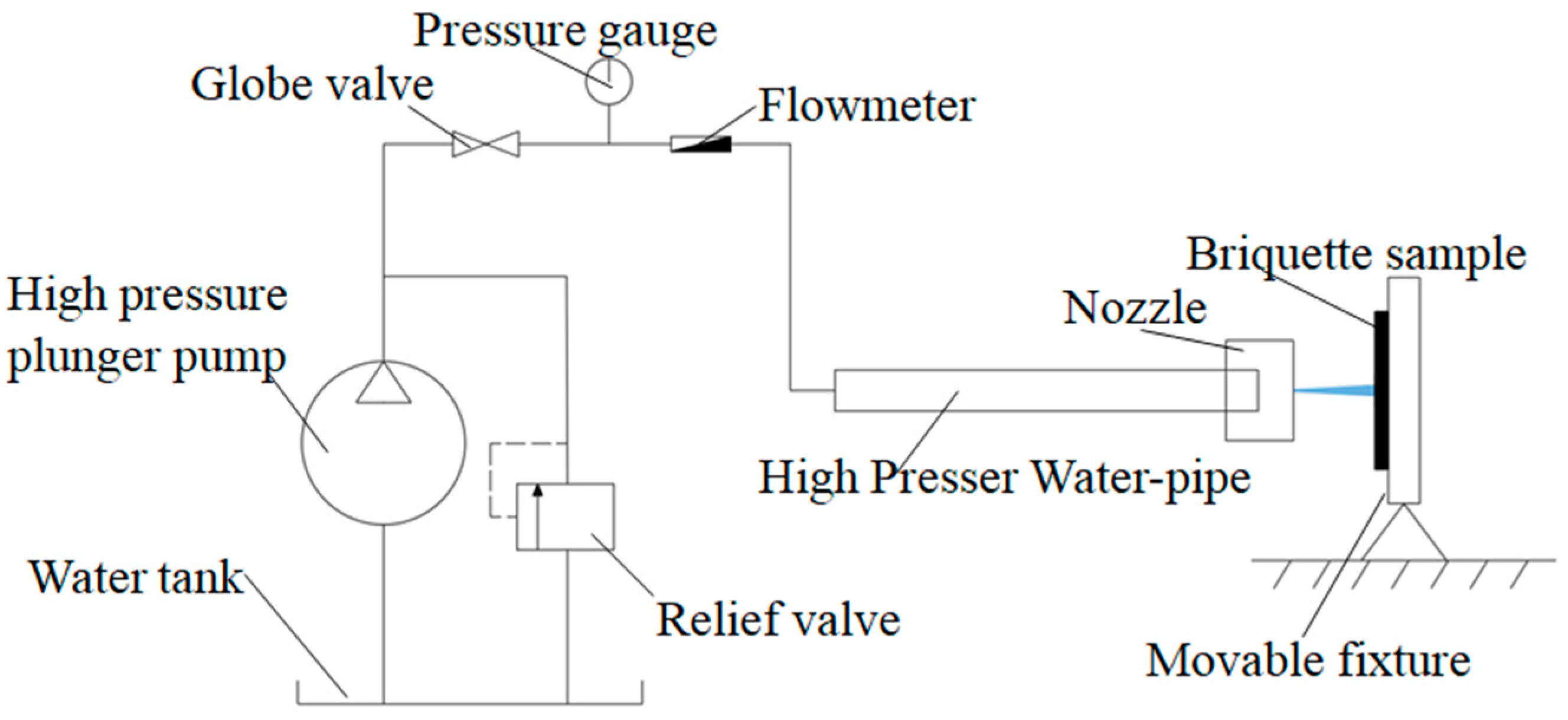
4.1. Experiment Scheme
4.2. Preparation of Briquette
4.3. Experiment Analysis
5. Conclusions
- (1)
- The multi−objective weight analysis method is used to optimize the parameters of the high−pressure water jet coal breaking and punching nozzle. It is concluded that the primary and secondary order affecting the maximum velocity in X-axis and effective extension distance in Y-axis of the water jet is as follows: divergence angle, contraction angle and length-to-diameter ratio. For the multi-index model, the weight analysis method can efficiently and accurately analyze the influence of parameters on multiple indexes.
- (2)
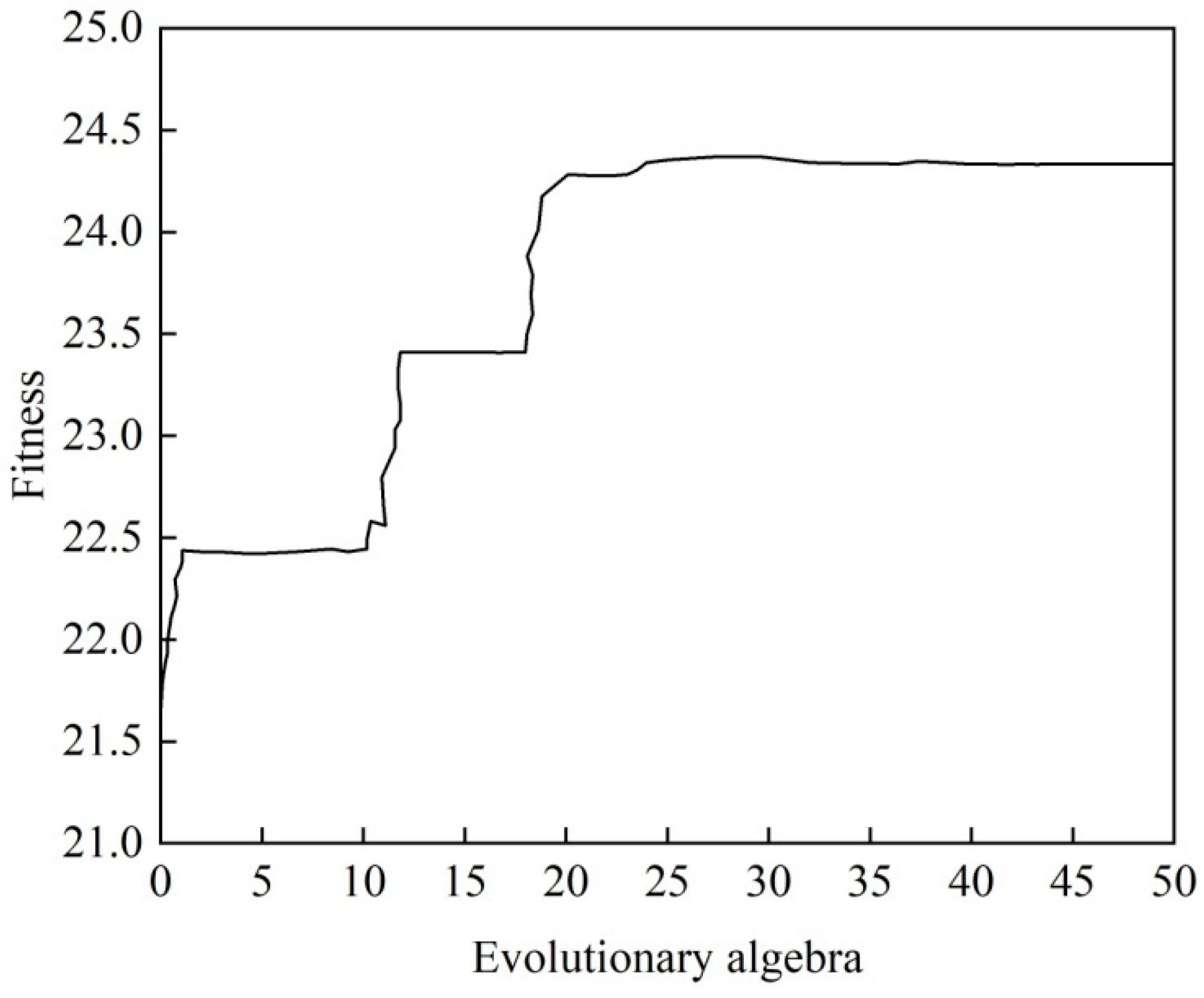
- The multi−objective collaborative optimization of the nozzle is carried out by using the collaborative optimization scheme of the BP neural network and GA. It is concluded that the optimal combination of its structure is as follows: the contraction angle is , the length-to-diameter ratio is , and the divergence angle is . Compared with the nozzle before optimization, the punching depth is increased by 72.71% and the punching diameter is increased by 106.72%. The combination of BP neural network and GA not only improves the global search efficiency, but also avoids falling into the local optimal solution.
- (3)
- The water jet punching experiment shows that the punching depth and punching diameter affect each other. When multiple objectives are considered synergistically, the performance of the water jet is significantly improved compared with considering each optimization objective separately, which not only provides a new idea for the optimization of the nozzle structure, but also can be used in other multi−objective and multi-parameter models.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shen, Z.H. Water Jet Theory and Technology; China University of Petroleum Press: Dongying, China, 1998. [Google Scholar]
- Liu, X.; Liu, S.; Ji, H. Mechanism of rock breaking by pick assisted with water jet of different modes. J. Mech. Sci. Technol. 2015, 29, 5359–5368. [Google Scholar] [CrossRef]
- Fuse, K.; Chaudhari, R.; Vora, J.; Patel, V.K.; de Lacalle, L.N.L. Multi-Response Optimization of Abrasive Waterjet Machining of Ti6Al4V Using Integrated Approach of Utilized Heat Transfer Search Algorithm and RSM. Materials 2021, 14, 7746. [Google Scholar] [CrossRef] [PubMed]
- Han, W.; Zhou, G.; Gao, D.; Zhang, Z.; Wei, Z.; Wang, H.; Yang, H. Experimental analysis of the pore structure and fractal characteristics of different metamorphic coal based on mercury intrusion-nitrogen adsorption porosimetry. Powder Technol. 2020, 362, 386–398. [Google Scholar] [CrossRef]
- Sharma, V.; Chattopadhyaya, S.; Hloch, S. Multi response optimization of process parameters based on Taguchi—fuzzy model for coal cutting by water jet technology. Int. J. Adv. Manuf. Technol. 2011, 56, 1019–1025. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, T.; Liu, X. Analysis of the stress wave effect during coal breakage by a high-pressure abrasive air jet. Adv. Mech. Eng. 2018, 10, 1687814018782302. [Google Scholar] [CrossRef]
- Liu, C.; Xia, B.; Lu, Y. Coal bed methane extraction using the self-oscillating water jet slotting method. Energies 2018, 11, 897. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.Z.; Wiśniewski, P.; Dykas, S.; Zhang, G. Permeability Enhancement Properties of High-Pressure Abrasive Water Jet Flushing and Its Application in a Soft Coal Seam. Front. Energy Res. 2021, 9, 679623. [Google Scholar] [CrossRef]
- Wen, J.W.; Chen, C. Optimizing the Structure of the Straight Cone Nozzle and the Parameters of Borehole Hydraulic Mining for Huadian Oil Shale Based on Experimental Research. Energies 2017, 10, 2021. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Guo, L.W.; Hu, Y.W.; Chen, Y. Internal structure of a jet nozzle for coal bed methane mining based on airfoil curves. Shock Vib. 2018, 2018 Pt 11, 3840834. [Google Scholar] [CrossRef]
- Li, H.S.; Liu, S.Y.; Jia, J.G.; Wang, F.C.; Guo, C.W. Numerical simulation of rock-breaking under the impact load of self-excited oscillating pulsed water jet. Tunn. Undergr. Sp. Technol. 2020, 96, 179–192. [Google Scholar] [CrossRef]
- Liu, Y.; Cui, J.W.; Jian, P.; Liu, X.T. Effect of the nozzle structure on coal breakage of SC-CO2 used for well drilling. Geomech. Geophys. Geo-Energy Geo-Resour. 2020, 6, 46–67. [Google Scholar] [CrossRef]
- Hong, C.Y.; Yang, R.Y.; Huang, Z.W.; Liu, W.; Chen, J.X.; Cong, R.C. Experimental investigation on coal-breakage performances by abrasive nitrogen-gas jet with a conical nozzle. Int. J. Rock Mech. Min. 2021, 142, 104781. [Google Scholar] [CrossRef]
- Wen, J.W.; Chen, C.; Qi, Z.W.; Campos, U.; Pei, X.J. Bionic optimum design of straight cone nozzle and the effectiveness evaluation of reducing fluid resistance. J. Braz. Soc. Mech. Sci. 2019, 41, 358–369. [Google Scholar] [CrossRef]
- Wen, J.W.; Qi, Z.W.; Behbahani, S.S.; Pei, X.J.; Iseley, T. Research on the structures and hydraulic performances of the typical direct jet nozzles for water jet technology. J. Braz. Soc. Mech. Sci. 2019, 41, 570–585. [Google Scholar] [CrossRef]
- Zhang, C.; Wen, P.; Yuan, Y.; Fan, X.J. Evaluation and optimal design of supersonic nozzle for laser-assisted oxygen cutting of thick steel sections. Int. J. Adv. Manuf. Technol. 2016, 86, 1243–1251. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.H.; Cheng, M.Z.; Cai, Y.; Guo, L.W.; Gao, D.R. Design and Optimization of High-Pressure Water Jet for Coal Breaking and Punching Nozzle Considering Structural Parameter Interaction. Machines 2022, 10, 60. [Google Scholar] [CrossRef]
- Juraeva, M.; Song, D.J.; Kang, D.J. Computational optimization approach to design a water-jet nozzle for a water-jet loom using the design of experiment method. J. Mech. Sci. Technol. 2019, 33, 631–637. [Google Scholar] [CrossRef]
- Hıra, O.; Yücedağ, S.; Samankan, S. Numerical and experimental analysis of optimal nozzle dimensions for FDM printers. Prog. Addit. Manuf. 2022, 1, 1–14. [Google Scholar] [CrossRef]
- Wang, A.; Sun, P.F.; Zhang, Z.W.; He, B.M.; Meng, G.Y.; Yang, J.; Cheng, X.H. Numerical Simulation and Experimental Study on High-Pressure Water Jet Descaling in Coal Mine Drainage Pipeline. Iran. J. Sci. Technol. Trans. Mech. Eng. 2022, 46, 113–130. [Google Scholar] [CrossRef]
- Tang, S.N.; Zhu, Y.; Yuan, S.Q. Intelligent Fault Diagnosis of Hydraulic Piston Pump Based on Deep Learning and Bayesian Optimization. ISA Trans. 2022, 1, 1–16. [Google Scholar] [CrossRef]
- Tang, S.N.; Zhu, Y.; Yuan, S.Q. A Novel Adaptive Convolutional Neural Network for Fault Diagnosis of Hydraulic Piston Pump with Acoustic Images. Adv. Eng. Inform. 2022, 52, 101554. [Google Scholar] [CrossRef]
- Tang, S.N.; Zhu, Y.; Yuan, S.Q. An adaptive deep learning model towards fault diagnosis of hydraulic piston pump using pressure signal. Eng. Fail. Anal. 2022, 138, 106300. [Google Scholar] [CrossRef]
- Tang, S.N.; Zhu, Y.; Yuan, S.Q. Intelligent Fault Identification of Hydraulic Pump Using Deep Adaptive Normalized CNN and Synchrosqueezed Wavelet Transform. Reliab. Eng. Syst. Saf. 2022, 224, 108560. [Google Scholar] [CrossRef]
- Ding, Y.; Wang, J.; Jiang, B.; Li, Z.; Xiao, Q.; Wu, L.; Xie, B. Multi-Objective Optimization for the Radial Bending and Twisting Law of Axial Fan Blades. Processes 2022, 10, 753. [Google Scholar] [CrossRef]
- Cain, E.; Konstantinos, P.; Fatos, X. Utilizing artificial neural networks and genetic algorithms to build an algo-trading model for intra-day foreign exchange speculation. Math. Comput. Model. 2013, 58, 1249–1266. [Google Scholar] [CrossRef]
- Maa, A.; Oab, B.; Az, C. Parametric analysis and minimization of entropy generation in bioinspired magnetized non-newtonian nanofluid pumping using artificial neural networks and particle swarm optimization—Science Direct. Therm. Sci. Eng. Prog. 2021, 24, 100930. [Google Scholar] [CrossRef]
- Chen, B.; Gao, D.R.; Li, Y.B. Experimental analysis of spray behavior and lubrication performance under twin-fluid atomization—Science Direct. J. Manuf. Process. 2021, 61, 561–573. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, H.; Liu, J.; Wang, C.; Ge, J.; Zhu, Y.; Chen, X.; Hu, B. Flow Characteristics of Oblique Submerged Impinging Jet at Various Impinging Heights. J. Mar. Sci. Eng. 2022, 10, 399. [Google Scholar] [CrossRef]
- Faha, B.; Kai, S.A.; Zc, A. Internal two-phase flow and spray characteristics of outside-in-liquid twin-fluid atomizers. Appl. Therm. Eng. 2021, 187, 116688. [Google Scholar] [CrossRef]
- Hu, B.; Wang, H.; Liu, J.; Zhu, Y.; Wang, C.; Ge, J.; Zhang, Y. A Numerical Study of a Submerged Water Jet Impinging on a Stationary Wall. J. Mar. Sci. Eng. 2022, 10, 228. [Google Scholar] [CrossRef]
- Xi, B.; Wang, C.; Xi, W. Experimental investigation on the water hammer characteristic of stalling fluid in eccentric casing-tubing annulus. Energy. 2022, 1, 124113. [Google Scholar] [CrossRef]
- Ge, Z.; Zhong, J.; Zhang, J. Structural Optimization of Slotting Nozzle Used to Improve Coal-Seam Permeability. Appl. Sci. 2020, 10, 699. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.Y.; Fei, H.; Liu, X.; Ao, X. On the failure pattern of sandstone impacted by high-velocity water jet. Int. J. Impact Eng. 2015, 76, 67–74. [Google Scholar] [CrossRef]
- Chen, B.; Lu, Y.J.; Li, W.Y. DPM-LES investigation on flow field dynamic and acoustic characteristics of a twin-fluid nozzle by multi-field coupling method. Int. J. Heat Mass Transf. 2022, 192, 122927. [Google Scholar] [CrossRef]
- Li, W.; Qian, L.; Song, S. Numerical Study on the Influence of Shaping Air Holes on Atomization Performance in Pneumatic Atomizers. Coatings 2019, 9, 410. [Google Scholar] [CrossRef] [Green Version]
- Azad, M.; Quinn, W.R.; Groulx, D. Mixing in Turbulent Free Jets Issuing from Isosceles Triangular Orifices with Different Apex Angles. Exp. Therm. Fluid Sci. 2012, 39, 237–251. [Google Scholar] [CrossRef]
- Tian, W.; Liao, Z.; Zhang, J. An optimization of artificial neural network model for predicting chlorophyll dynamics. Ecol. Model. 2017, 364, 42–52. [Google Scholar] [CrossRef]
- Chen, L.L.; Chen, J.; Wang, C. Modeling of Moisture Content of Subgrade Materials in High-Speed Railway Using a Deep Learning Method. Adv. Mater. Sci. Eng. 2021, 2021, 6166489. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, G.P.; Tang, S.N.; Wang, R.; Su, H.; Wang, C. Acoustic Signal-based Fault Detection of Hydraulic Piston Pump using a Particle Swarm Optimization Enhancement CNN. Appl. Acoust. 2022, 192, 108718. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, G.P.; Wang, R.; Tang, S.N.; Su, H.; Cao, K. Intelligent Fault Diagnosis of Hydraulic Piston Pump Combining Improved LeNet-5 and PSO Hyperparameter Optimization. Appl. Acoust. 2021, 183, 108336. [Google Scholar] [CrossRef]
- Gao, Q.; Zhu, Y.; Liu, J. Dynamics modelling and control of a novel fuel metering valve actuated by two binary-coded digital valve arrays. Machines 2022, 10, 55. [Google Scholar] [CrossRef]
- Yuan, X.M.; Wang, W.Q.; Zhu, X. Theory Model of Dynamic Bulk Modulus of Aerated Hydraulic Fluid. Chin. J. Mech. Eng.-En. 2022, 4, 735. [Google Scholar] [CrossRef]
- Wang, S.; Xiao, B.; Ge, Y. Optimization design of slotted fins based on exergy destruction minimization coupled with optimization algorithm. Int. J. Therm. Sci. 2020, 147, 106133. [Google Scholar] [CrossRef]
- Gao, Q. Nonlinear Adaptive Control with Asymmetric Pressure Difference Compensation of a Hydraulic Pressure Servo System Using Two High Speed On/Off Valves. Machines 2022, 10, 66. [Google Scholar] [CrossRef]
- Wu, J.; Cheng, Y.M.; Liu, C. A BP Neural Network Based on Improved PSO for Increasing Current Efficiency of Copper Electrowinning. J. Electr. Eng. Technol. 2021, 16, 1297–1304. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Number of Grid | Maximum Velocity of X-axis (m/s) | Deviation (%) |
|---|---|---|---|
| Nozzle | 643,765 | 199.241 | 0.212 |
| 1,257,283 | 199.865 | 0 | |
| 2,345,759 | 199.395 | 0.115 | |
| Externalflowfield | 4,165,783 | 199.383 | 0.241 |
| 4,987,351 | 199.865 | 0 | |
| 5,634,524 | 200.068 | 0.102 |
| Structure Parameter | Numerical Value |
|---|---|
| Contraction angle (°) | 30 |
| Length-to-diameter ratio | 2 |
| Divergence angle (°) | 0 |
| Parameter | Initial Value | Range of the Value |
|---|---|---|
| A () | 30° | 30–70° |
| B () | 2 | 2–3 |
| C () | 0° | 0–15° |
| Factors | A | B | C | Maximum Velocityin X-axis (m/s) | Effective Extension Distance in Y-axis (mm) |
|---|---|---|---|---|---|
| Test Number | 1(°) | 2 | 3(°) | ||
| 1 | 30 | 2 | 0 | 199.865 | 1.212 |
| 2 | 30 | 2 | 10 | 199.868 | 1.323 |
| 3 | 30 | 2 | 15 | 198.397 | 1.463 |
| 4 | 30 | 2.5 | 0 | 200.393 | 1.303 |
| 5 | 30 | 2.5 | 10 | 199.424 | 1.503 |
| 6 | 30 | 2.5 | 15 | 198.118 | 1.563 |
| 7 | 30 | 3 | 0 | 199.879 | 1.221 |
| 8 | 30 | 3 | 10 | 200.024 | 1.402 |
| 9 | 30 | 3 | 15 | 198.35 | 1.532 |
| 10 | 50 | 2 | 0 | 200.484 | 1.242 |
| 11 | 50 | 2 | 10 | 199.181 | 1.341 |
| 12 | 50 | 2 | 15 | 197.16 | 1.502 |
| 13 | 50 | 2.5 | 0 | 199.382 | 1.283 |
| 14 | 50 | 2.5 | 10 | 198.277 | 1.522 |
| 15 | 50 | 2.5 | 15 | 198.476 | 1.582 |
| 16 | 50 | 3 | 0 | 199.426 | 1.281 |
| 17 | 50 | 3 | 10 | 198.39 | 1.401 |
| 18 | 50 | 3 | 15 | 195.748 | 1.441 |
| 19 | 70 | 2 | 0 | 198.331 | 1.183 |
| 20 | 70 | 2 | 10 | 195.775 | 1.361 |
| 21 | 70 | 2 | 15 | 188.234 | 1.421 |
| 22 | 70 | 2.5 | 0 | 198.936 | 1.191 |
| 23 | 70 | 2.5 | 10 | 195.603 | 1.381 |
| 24 | 70 | 2.5 | 15 | 193.189 | 1.602 |
| 25 | 70 | 3 | 0 | 199.225 | 1.101 |
| 26 | 70 | 3 | 10 | 195.284 | 1.321 |
| 27 | 70 | 3 | 15 | 191.606 | 1.522 |
| Hierarchical Structure | Model |
|---|---|
| Target layer | The two indexes |
| Factor layer | A, B, C |
| Horizontal layer | A1–A3, B1–B3, C1–C3 |
| Weight Matrix | Numerical Value | Weight Matrix | Numerical Value | Weight Matrix | Numerical Value |
|---|---|---|---|---|---|
| WA1 | 0.093052 | WB1 | 0.062866 | WC1 | 0.165514 |
| WA2 | 0.093238 | WB2 | 0.065545 | WC2 | 0.17845 |
| WA3 | 0.090959 | WB3 | 0.063391 | WC3 | 0.186986 |
| Category | Result | ||
|---|---|---|---|
| Sensitivity of each factor | A | B | C |
| 0.2772 | 0.1918 | 0.5310 | |
| Primary and secondary order of factors | C > A > B | ||
| Optimal combination | A2B2C3 | ||
| Serial Number of the Function | Training Function | Training Times | Serial Number of the Function | Training Function | Training Times |
|---|---|---|---|---|---|
| 1 | Traingda | 115 times to reach the target | 5 | Traincgf | 22 times to reach the target |
| 2 | Trainbfg | 29 times to reach the target | 6 | Trainscg | 26 times to reach the target |
| 3 | Trainoss | 20 times to reach the target | 7 | Trainrp | 76 times to reach the target |
| 4 | Traincgb | 17 times to reach the target | 8 | Trainlm | 19 times to reach the target |
| Evaluation Index | Category | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 |
|---|---|---|---|---|---|---|
| Target 1 | Actual value (m/s) | 199.865 | 199.424 | 200.484 | 198.476 | 195.775 |
| Predicted value (m/s) | 197.541 | 201.56 | 200.484 | 198.476 | 197.003 | |
| Relative error (m/s) | 1.16 | 1.07 | 0 | 0 | 0.63 | |
| Target 2 | Actual value (m/s) | 1.212 | 1.503 | 1.242 | 1.582 | 1.361 |
| Predicted value (m/s) | 1.231 | 1.503 | 1.256 | 1.57 | 1.389 | |
| Relative error (%) | 1.57 | 0 | 1.13 | 0.76 | 2.05 |
| Category | Optimization Parameter | Category | Optimization Parameter | ||||||
| Contraction Angle θ (°) | Length-to-Diameter Ratio l/d | Divergence Angle γ (°) | Contraction Angle θ (°) | Length-to-Diameter Ratio l/d | Divergence Angle γ (°) | ||||
| Initial value | 30 | 2 | 0 | Optimal value of orthogonal test | 50 | 2.5 | 15 | ||
| Collaborative optimization value | 42.512 | 2.5608 | 12.431 | Collaborative optimization value | 42.512 | 2.5608 | 12.431 | ||
| Change rate | 41.71% | 28.04% | ∞ | Change rate | 14.98% | 2.43% | −17.13% | ||
| Category | Optimization Target | Category | Optimization Target | ||||||
| Target 1 (m/s) | Target 2 (mm) | Target 1 (m/s) | Target 2 (mm) | ||||||
| Initial value | 199.865 | 1.212 | Optimal value of orthogonal test | 198.476 | 1.582 | ||||
| Collaborative optimization value | 203.77 | 1.632 | Collaborative optimization value | 203.77 | 1.632 | ||||
| Optimization rate | 1.95% | 34.65% | Optimization rate | 2.67% | 3.16% | ||||
| Specimen Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Compressive strength/MPa | 14.9 | 15.1 | 15.0 | 15.0 | 14.8 |
| Absolute errorof compressive strength | 0.67% | 0.67% | 0 | 0 | 1.33% |
| Nozzle Model | Experiment Number | Arithmetic Mean | Standard Deviation | Improve Rate | ||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 1 | 43.3 mm | 44.5 mm | 44.3 mm | 44.03 mm | 0.5249 | 72.71% |
| 2 | 57.4 mm | 57.0 mm | 57.7 mm | 57.36 mm | 0.2867 | 31.88% |
| 3 | 75.2 mm | 76.4 mm | 75.6 mm | 75.73 mm | 0.4989 | optimal value |
| Nozzle Model | Experiment Number | Arithmetic Mean | Standard Deviation | Improve Rate | ||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 1 | 6.5 mm | 6.4 mm | 6.3 mm | 6.40 mm | 0.0816 | 106.72% |
| 2 | 10.4 mm | 10.7 mm | 10.6 mm | 10.56 mm | 0.1249 | 25.28% |
| 3 | 13.2 mm | 13.4 mm | 13.1 mm | 13.23 mm | 0.1248 | optimal value |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Cheng, M.; Cai, Y.; Guo, L.; Gao, D. Multi−Objective Collaborative Optimization Design of Key Structural Parameters for Coal Breaking and Punching Nozzle. Processes 2022, 10, 1036. https://doi.org/10.3390/pr10051036
Chen L, Cheng M, Cai Y, Guo L, Gao D. Multi−Objective Collaborative Optimization Design of Key Structural Parameters for Coal Breaking and Punching Nozzle. Processes. 2022; 10(5):1036. https://doi.org/10.3390/pr10051036
Chicago/Turabian StyleChen, Lihuan, Muzheng Cheng, Yi Cai, Liwen Guo, and Dianrong Gao. 2022. "Multi−Objective Collaborative Optimization Design of Key Structural Parameters for Coal Breaking and Punching Nozzle" Processes 10, no. 5: 1036. https://doi.org/10.3390/pr10051036