
Exploring the Essence of Servo Pump Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
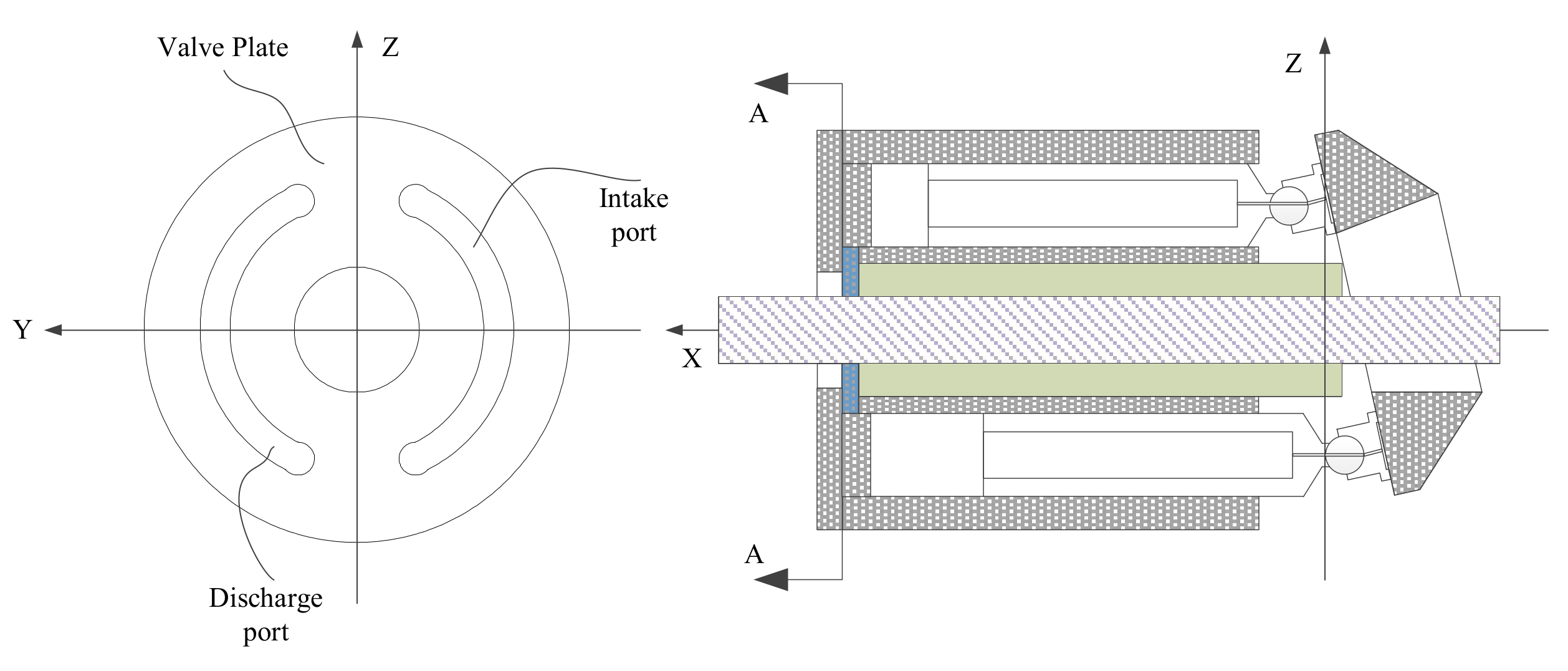
2. Introduction of ESPCS
3. Mechanism Prediction Mathematical Model Establishment
3.1. Servo Motor Load–Speed Characteristic Mathematical Model
3.2. Mathematical Model of Generalized Dead-Zone Characteristics of Fixed-Displacement Pump
3.2.1. Shoe Pair Leakage Model
3.2.2. Plunger Pair Leakage Model
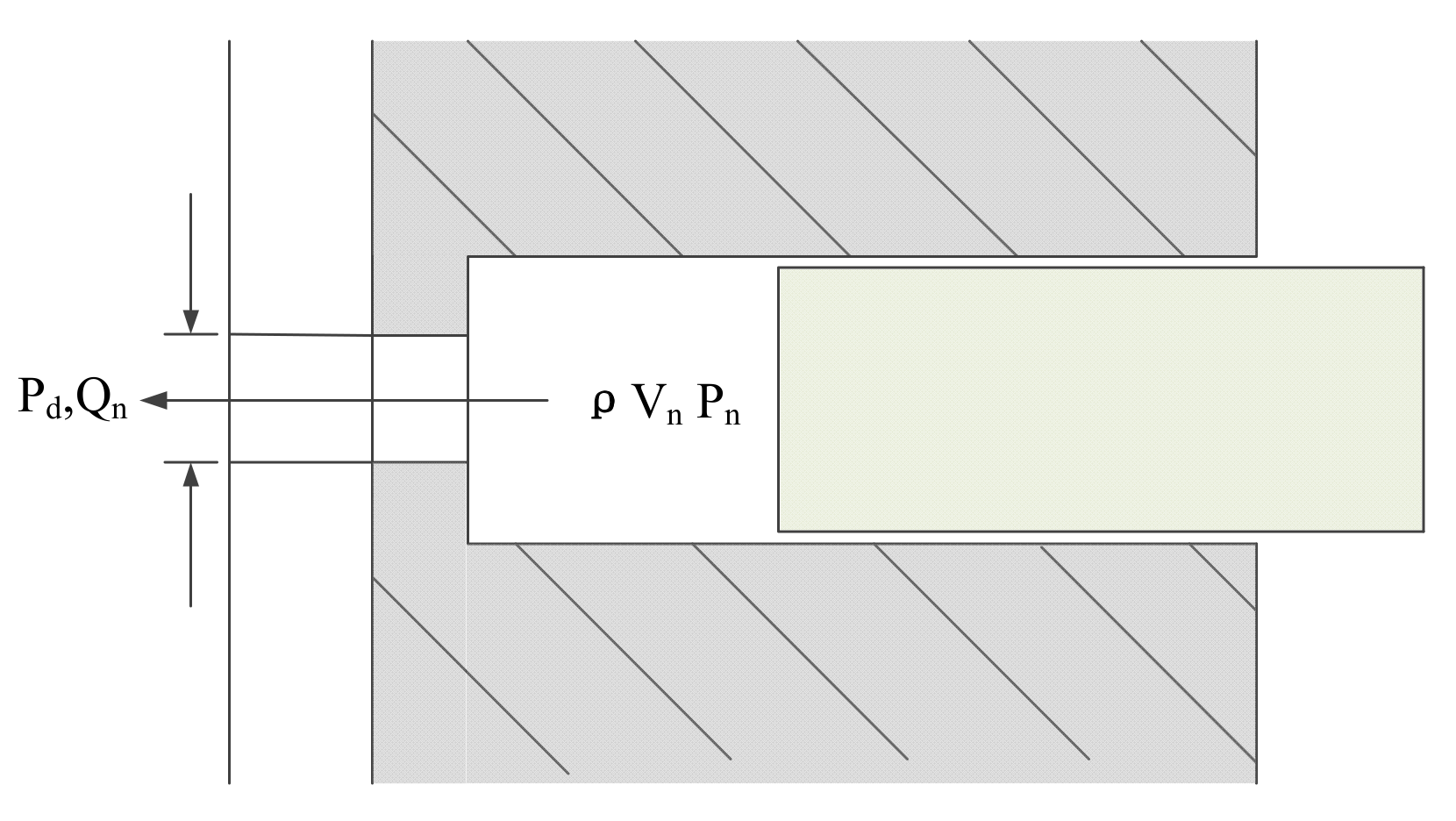
3.2.3. Port Flow Leakage Plate Model
3.3. Mathematical Model of Energy Storage Characteristics of Accumulator
3.4. Mathematical Model of Friction and Leakage Characteristics of Hydraulic Cylinder
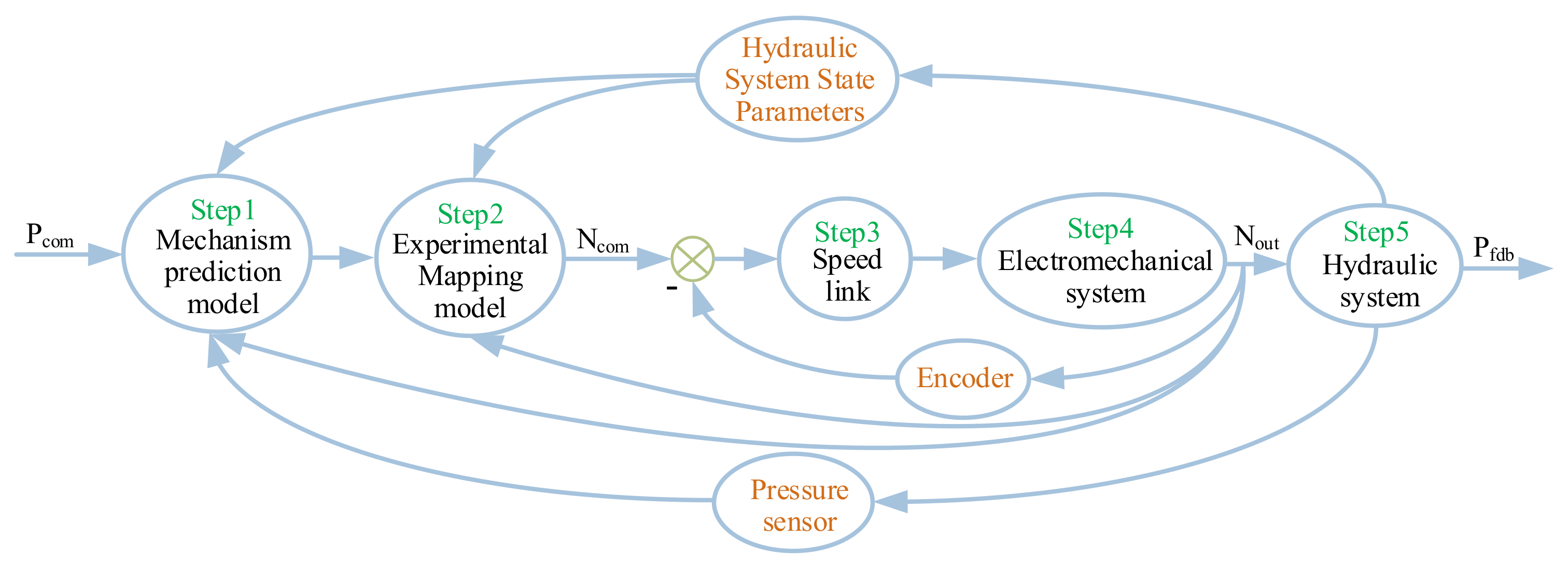
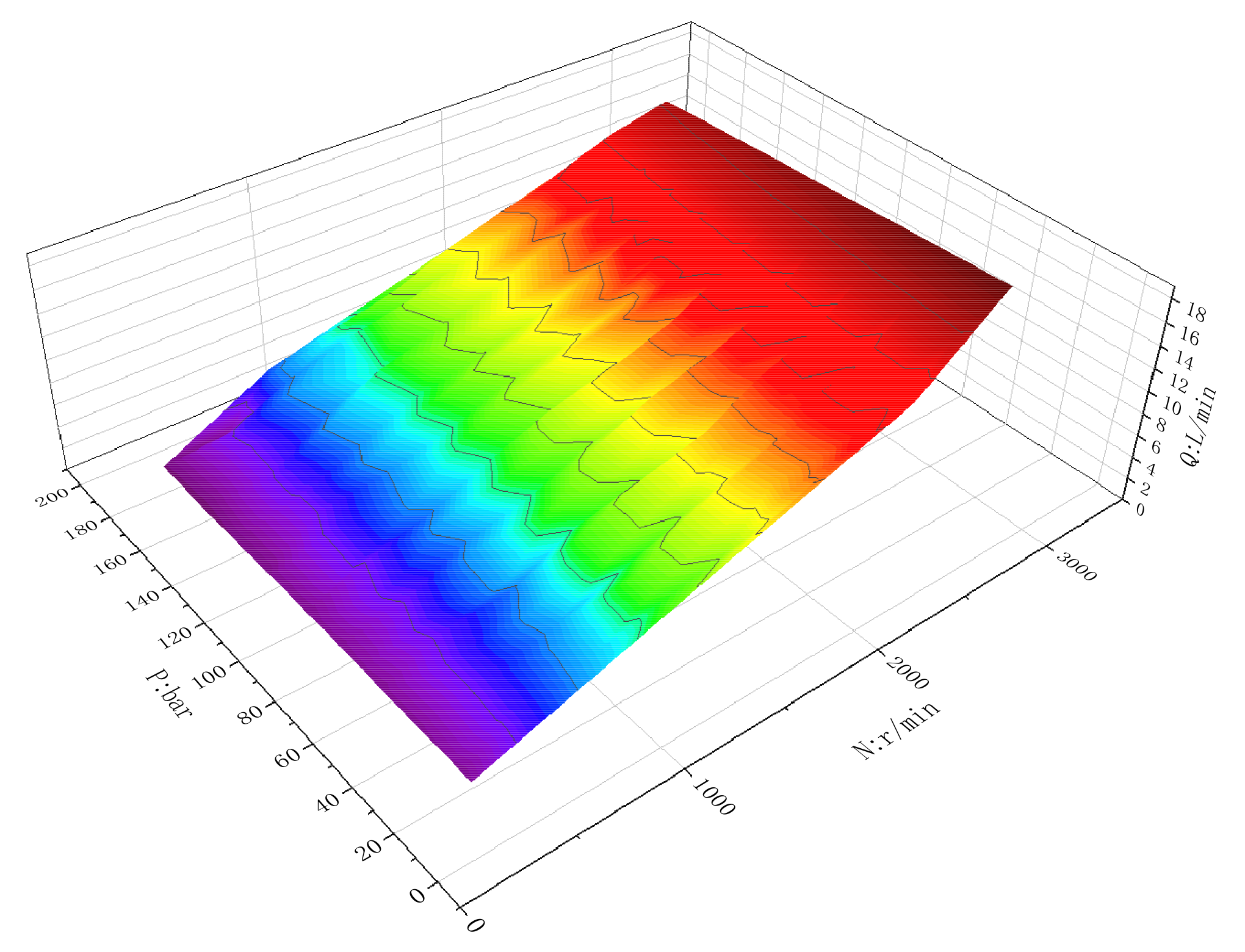
3.5. Flow Mechanism Prediction Model of Electrohydraulic Servo Pump-Control System
4. Experimental Study
4.1. Experimental Research Conditions
4.2. Experimental Curve Analysis and Research
4.2.1. Experimental Study on Load–Speed Characteristics of Servo Motor
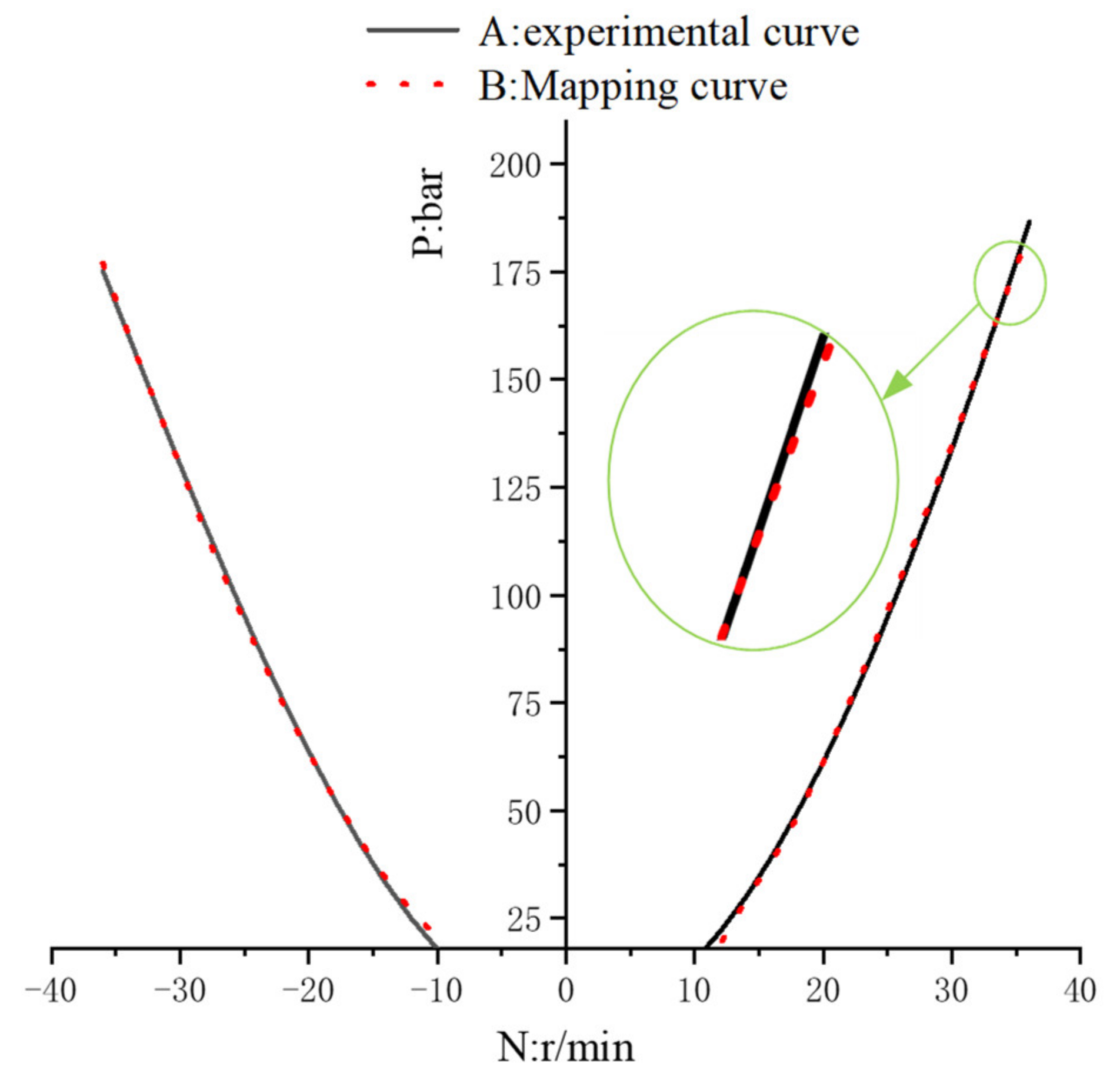
4.2.2. Experimental Study on Generalized Dead-Zone Characteristics of Fixed-Displacement Pump
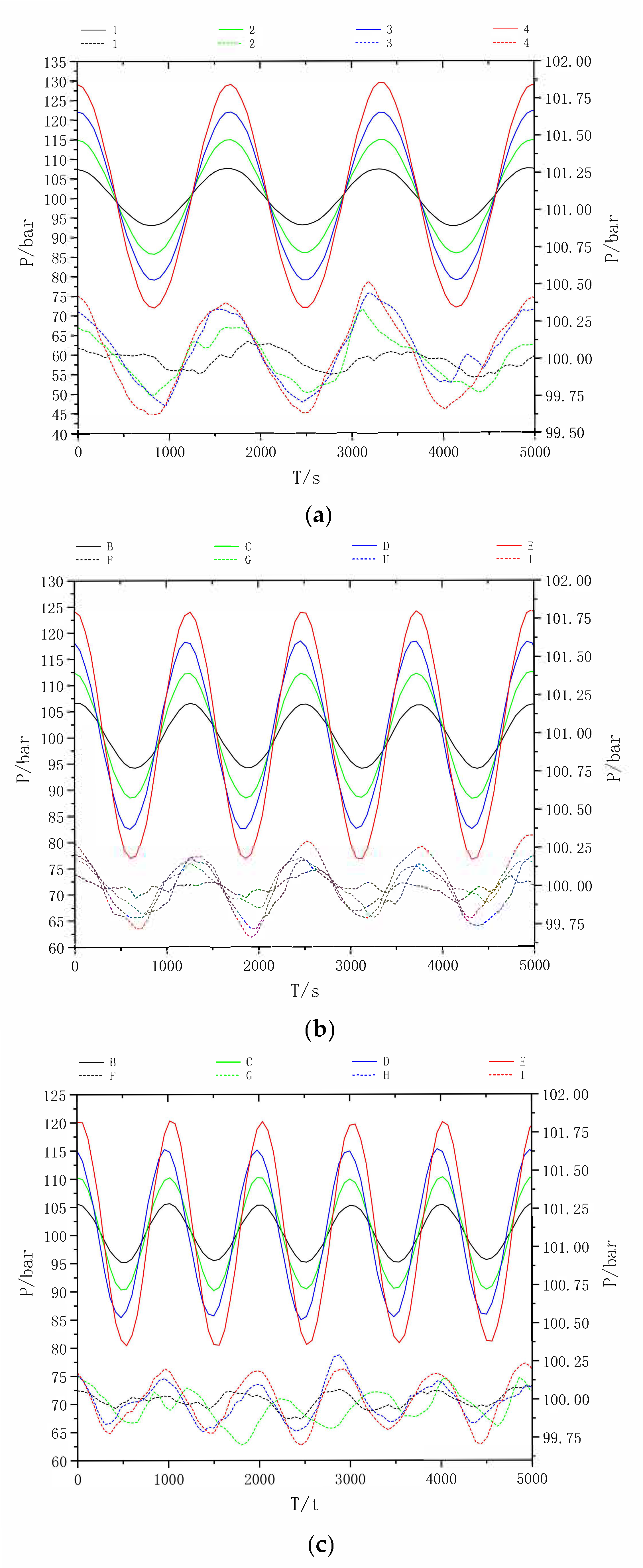
4.2.3. Experimental Study on Accumulator Energy Storage Characteristics
4.2.4. Experimental Study on the Friction Characteristics of Hydraulic Cylinder
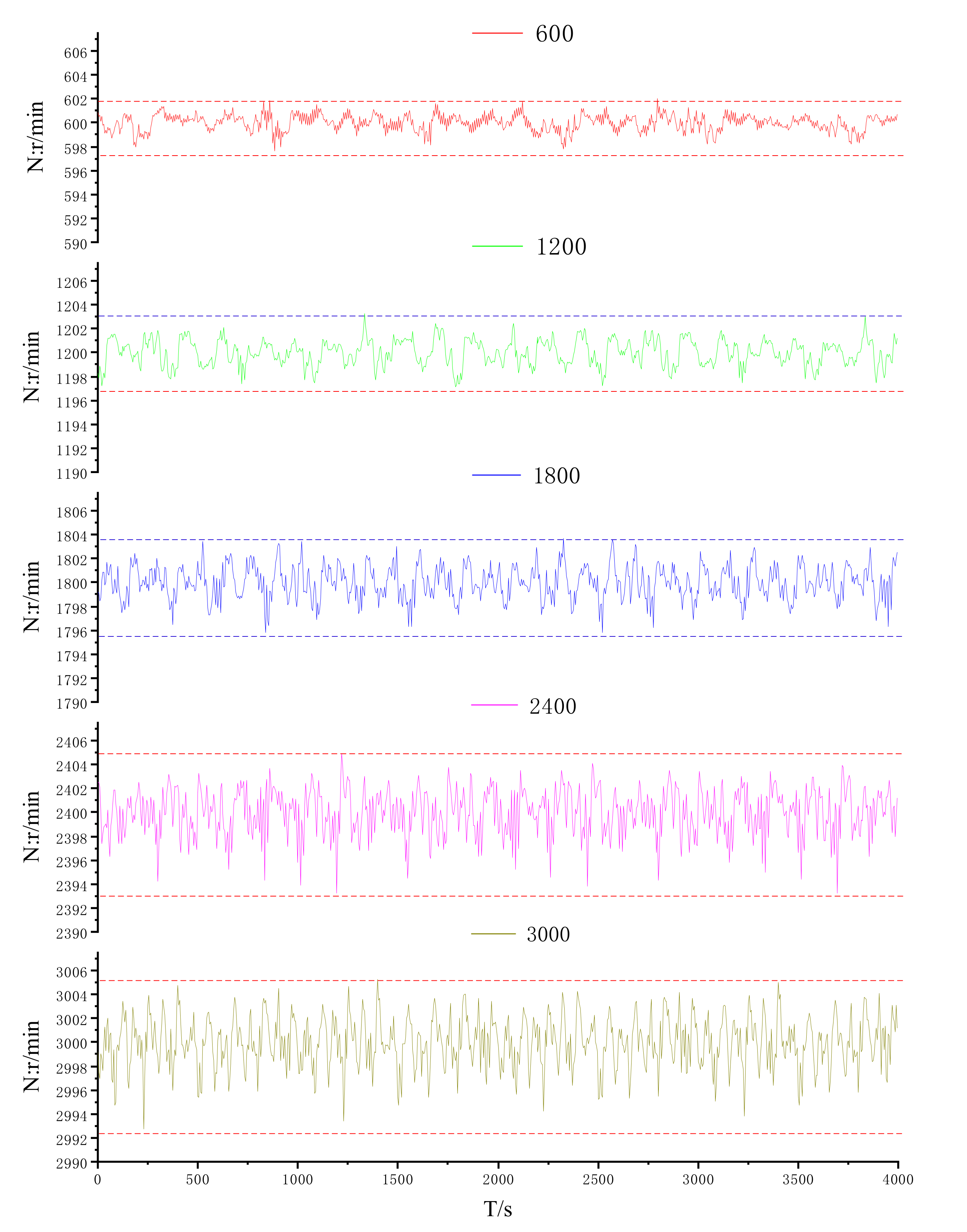
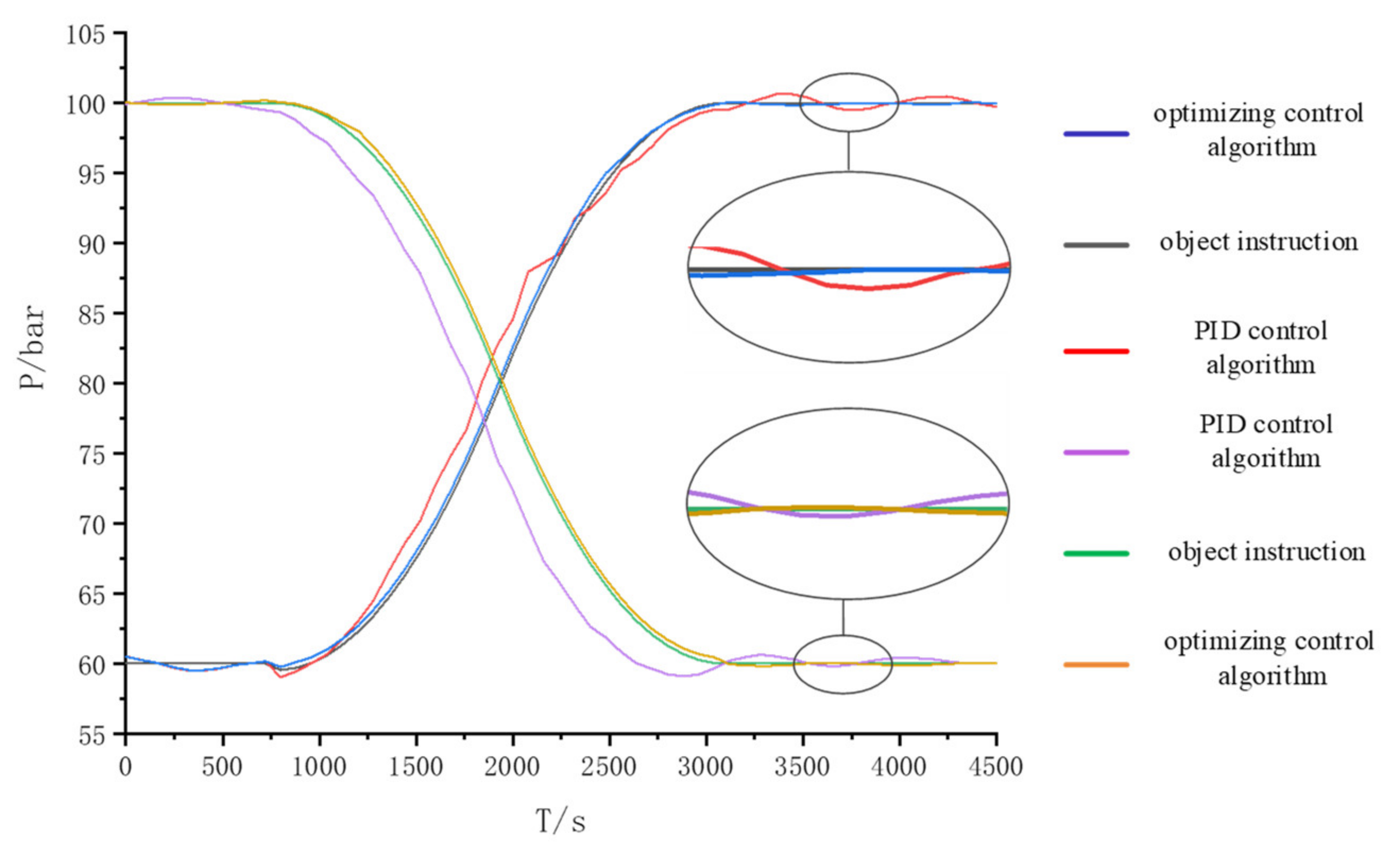
4.2.5. Experimental Verification of High-Precision Pressure Control Based on Flow Nonlinear Compensation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
| Parameter Definition Table | |||
| Variable Name | Parameter Values | Variable Name | Parameter Values |
| a11 | 250.7 | a00 | −664 |
| b11 | 47.38 | a21 | 2120 |
| c11 | 17.13 | b21 | −865.1 |
| a12 | 10.06 | a22 | −116.6 |
| b12 | −28.34 | b22 | 5.931 |
| c12 | 8.063 | a23 | −267.9 |
| a13 | 218.6 | b23 | 593.3 |
| b13 | −45.57 | a24 | 84.01 |
| c13 | 18.57 | b24 | −78.01 |
| a14 | 46.14 | a25 | −83.38 |
| b14 | 27.08 | b25 | −284.8 |
| c14 | 11.51 | w1 | 2.52 |
| a15 | 12.43 | a01 | 2.831 × 10−5 |
| b15 | 16.09 | a31 | −0.3626 |
| c15 | 9.141 | b31 | 0.482 |
| a16 | 27.45 | a32 | −0.0002265 |
| b16 | −20.04 | b32 | 5.446 × 10−5 |
| c16 | 11.17 | a33 | 0.07728 |
| p00 | 0.07542 | b33 | −0.005133 |
| p10 | −0.011 | a34 | 0.0001464 |
| p01 | 0.007577 | b34 | −0.0001172 |
| p20 | 0.0001085 | a35 | −0.008805 |
| p11 | −5.464 × 10−6 | b35 | 0.05138 |
| p02 | −5.951 × 10−7 | a36 | −0.0001165 |
| p30 | −3.689 × 10−7 | b36 | 3.717 × 10−5 |
| p21 | 2.583 × 10−9 | a37 | −0.03001 |
| p12 | 7.639 × 10−10 | b37 | −0.01099 |
| p03 | 1.645 × 10−10 | a38 | 0.000395 |
| w2 | 2.523 | b38 | 5.017 × 10−5 |
References
- Luo, G.; Görges, D. Modeling and Adaptive Robust Force Control of a Pump-Controlled Electro-Hydraulic Actuator for an Active Suspension System. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 592–597. [Google Scholar]
- Li, X.; Jiao, Z.; Yan, L.; Cao, Y. Modeling and Experimental Study on a Novel Linear Electromagnetic Collaborative Rectification Pump. Sens. Actuators A Phys. 2020, 309, 111883. [Google Scholar] [CrossRef]
- Lee, S.R.; Hong, Y.S. A Dual EHA System for the Improvement of Position Control Performance Via Active Load Compensation. Int. J. Precis. Eng. Manuf. 2017, 18, 937–944. [Google Scholar] [CrossRef]
- Yuan, H.B.; Na, H.C.; Kim, Y.B. Robust MPC–PIC force control for an electro-hydraulic servo system with pure compressive elastic load. Control Eng. Pract. 2018, 79, 170–184. [Google Scholar] [CrossRef]
- Zhu, Y.; Jiang, W.L.; Kong, X.D.; Zheng, Z. Study on nonlinear dynamics characteristics of electrohydraulic servo system. Nonlinear Dyn. 2015, 80, 723–737. [Google Scholar] [CrossRef]
- Hao, Y.; Xia, L.; Ge, L.; Wang, X.; Qvan, L. Research on Position Control Characteristics of Hybrid Linear Drive System. Trans. Chin. Soc. Agric. Mach. 2020, 51, 379–385. [Google Scholar]
- Jing, C.; Xu, H.; Jiang, J. Dynamic surface disturbance rejection control for electro-hydraulic load simulator. Mech. Syst. Signal Process. 2019, 134, 106293. [Google Scholar] [CrossRef]
- Zhang, L.; Guo, F.; Li, Y.; Lu, W. Global dynamic modeling of electro-hydraulic 3-UPS/S parallel stabilized platform by bond graph. Chin. J. Mech. Eng. 2016, 29, 1176–1185. [Google Scholar] [CrossRef]
- Yu, Z.; Leng, B.; Xiong, L.; Feng, Y.; Shi, F. Direct yaw moment control for distributed drive electric vehicle handling performance improvement. Chin. J. Mech. Eng. 2016, 29, 486–497. [Google Scholar] [CrossRef]
- Wang, C.; Quan, L. Characteristic of Pump Controlled Single Rod Cylinder with Combination of Variable Displacement and Speed. Trans. Chin. Soc. Agric. Mach. 2017, 48, 405–412. [Google Scholar]
- Yue, J.; Dai, B.; Xu, W.U.; Yang, L. The Impact of Flow Pulsation of Axial Piston Pump on Gun Pitching Accuracy of a Multiple Rocket Launcher. Acta Armamentarii 2019, 40, 1781. [Google Scholar]
- Wang, L.; Wang, D.; Qi, J.; Xue, Y. Internal leakage detection of hydraulic cylinder based on wavelet analysis and backpropagation neural network. In Proceedings of the 2020 Global Reliability and Prognostics and Health Management (PHM-Shanghai), Shanghai, China, 16–18 October 2020; pp. 1–6. [Google Scholar]
- Li, Y.; Shang, Y.; Jiao, Z. EHA position system simulation based on fuzzy sliding mode control. In Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems (AUS 2018), Guiyang, China, 19–22 June 2018; pp. 1012–1016. [Google Scholar] [CrossRef]
- Xia, H.; Yang, B.; Shang, Y.; Jiao, Z. Simulation and verification of pressure characteristics of aircraft hydraulic power system. In Proceedings of the 2019 IEEE 8th International Conference on Fluid Power and Mechatronics (FPM), Wuhan, China, 10–13 April 2019; pp. 1197–1202. [Google Scholar]
- Li, J.; Fu, Y.; Zhang, G.; Gao, B.; Ma, J. Research on fast response and high accuracy control of an airborne brushless DC motor. In Proceedings of the IEEE International Conference on Robotics & Biomimetics, Shenyang, China, 22–26 August 2004; pp. 807–810. [Google Scholar]
- Guo, J.; Ye, C.; Wu, G. Simulation and Research on Position Servo Control System of Opposite Vertex Hydraulic Cylinder based on Fuzzy Neural Network. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 1139–1143. [Google Scholar]
- Essa, M.E.S.M.; Aboelela, M.A.; Hassan, M.M.; Abdraboo, S.M. Fractional order fuzzy logic position and force control of experimental electro-hydraulic servo system. In Proceedings of the 2019 8th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2019; pp. 1–4. [Google Scholar]
- Essa ME, S.M.; Aboelela, M.A.; Hassan, M.M.; Abdrabbo, S.M. Control of hardware implementation of hydraulic servo application based on adaptive neuro fuzzy inference system. In Proceedings of the 2018 14th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 29–30 December 2018; pp. 168–173. [Google Scholar]
- Milić, V.; Šitum, Ž.; Essert, M. Robust position control synthesis of an electro-hydraulic servo system. ISA Trans. 2010, 49, 535–542. [Google Scholar] [CrossRef] [PubMed]
- Yin, X.; Zhang, W.; Jiang, Z.; Pan, L. Adaptive robust integral sliding mode pitch angle control of an electro-hydraulic servo pitch system for wind turbine. Mech. Syst. Signal Process. 2019, 133, 105704. [Google Scholar] [CrossRef]
- Xu, G.; Chen, M.; He, X.; Pang, H.; Miao, H.; Cui, P.; Wang, W.; Diao, P. Path following control of tractor with an electro-hydraulic coupling steering system: Layered multi-loop robust control architecture. Biosyst. Eng. 2021, 209, 282–299. [Google Scholar] [CrossRef]
- Lin, Y.; Shi, Y.; Burton, R. Modeling and robust discrete-time sliding-mode control design for a fluid power electrohydraulic actuator (EHA) system. IEEE/ASME Trans. Mechatron. 2011, 18, 1–10. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, X.; Wang, J.; Karimi, H.R. Robust H∞ sliding mode control with pole placement for a fluid power electrohydraulic actuator (EHA) system. Int. J. Adv. Manuf. Technol. 2014, 73, 1095–1104. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.M.; Park, S.H.; Song, J.H.; Kim, J.S. Robust position control of electro-hydraulic actuator systems using the adaptive back-stepping control scheme. Proc. Inst. Mech. Eng. 2010, 224, 737–746. [Google Scholar] [CrossRef]
- Ahn, K.K.; Nam, D.N.C.; Jin, M. Adaptive Backstepping Control of an Electrohydraulic Actuator. IEEE/ASME Trans. Mechatron. 2013, 19, 987–995. [Google Scholar] [CrossRef]
- Shen, Y.; Wang, X.; Wang, S.; Mattila, J. An Adaptive Control Method for Electro-hydrostatic Actuator Based on Virtual Decomposition Control. In Proceedings of the 2020 Asia-Pacific International Symposium on Advanced Reliability and Maintenance Modeling (APARM), Vancouver, BC, Canada, 20–23 August 2020; pp. 1–6. [Google Scholar]

























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, G.; Jin, Z.; Zhang, T.; Zhang, C.; Ai, C.; Chen, G. Exploring the Essence of Servo Pump Control. Processes 2022, 10, 786. https://doi.org/10.3390/pr10040786
Yan G, Jin Z, Zhang T, Zhang C, Ai C, Chen G. Exploring the Essence of Servo Pump Control. Processes. 2022; 10(4):786. https://doi.org/10.3390/pr10040786
Chicago/Turabian StyleYan, Guishan, Zhenlin Jin, Tiangui Zhang, Cheng Zhang, Chao Ai, and Gexin Chen. 2022. "Exploring the Essence of Servo Pump Control" Processes 10, no. 4: 786. https://doi.org/10.3390/pr10040786