
Event-Triggered Filtering for Delayed Markov Jump Nonlinear Systems with Unknown Probabilities


Abstract
:1. Introduction
2. Preliminaries
3. Main Results
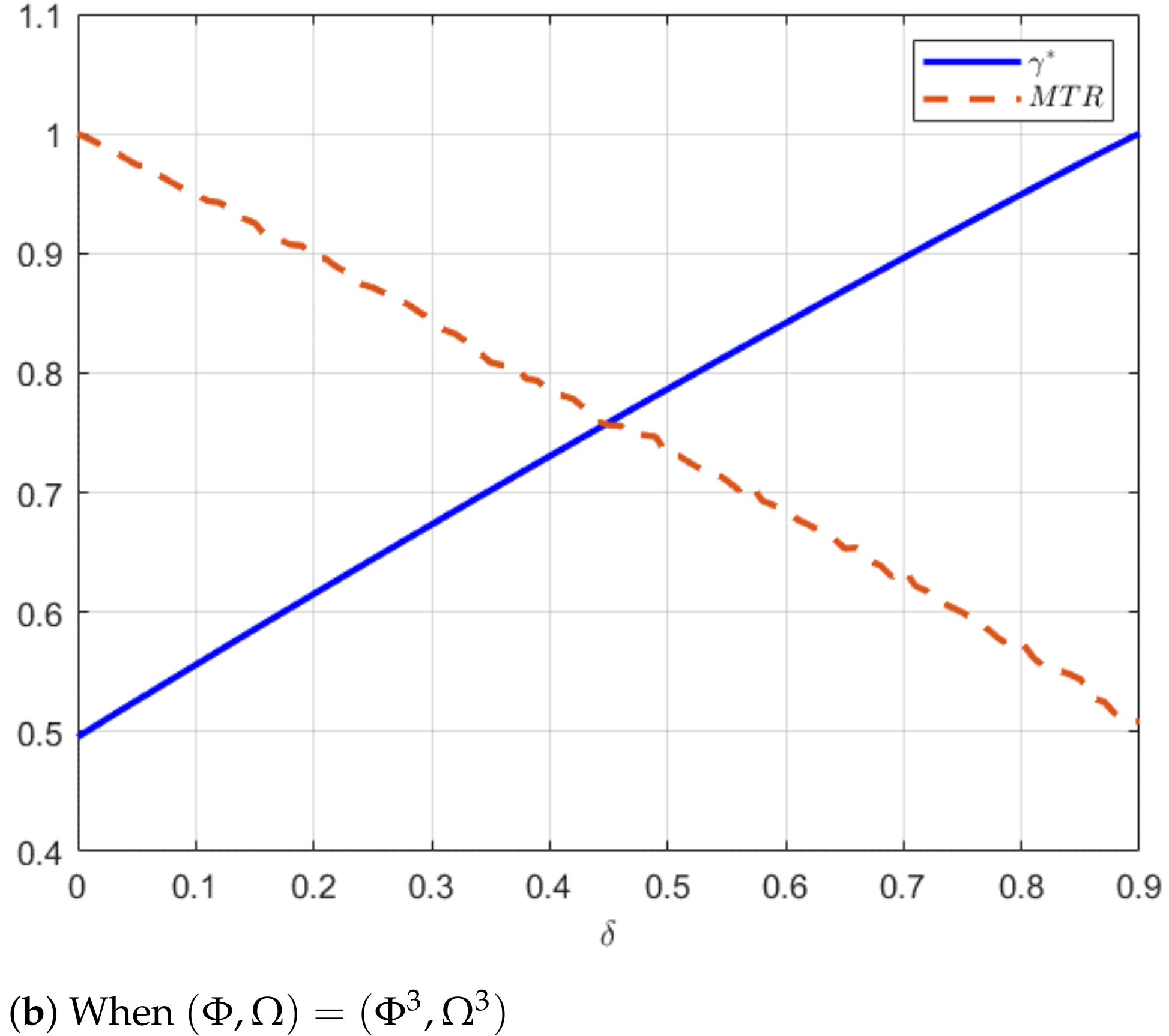
4. Numerical Example
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HMM | hidden Markov model |
| MJNSs | Markov jump nonlinear systems |
| MJSs | Markov jump systems |
| NN | neural network |
| MJNNs | Markov jump neural networks |
| NCSs | networked control systems |
| ET | event-triggered |
| CPM | conditional probability matrix |
| TPs | transition probabilities |
| TPM | transition probability matrix |
| LKF | Lyapunov–Krasovskii functional |
| ZOH | zero-order holder |
| CP | conditional probability |
| LMIs | linear matrix inequalities |
References
- He, H.F.; Qi, W.H.; Kao, Y.G. HMM-based adaptive attack-resilient control for Markov jump system and application to an aircraft model. Appl. Math. Comput. 2021, 392, 1–12. [Google Scholar] [CrossRef]
- Zhang, L.X.; Yang, T.; Shi, P.; Zhu, Y.Z. Analysis and Design of Markov Jump Systems with Complex Transition Probabilitie; Springer: Berlin/Heidelberg, Germany, 2016; ISBN 978-3-319-28846-8. [Google Scholar]
- Costa, O.L.V.; Araujo, M.V. A generalized multi-period mean-variance portfolio optimization with Markov switching parameters. Automatica 2008, 44, 2487–2497. [Google Scholar] [CrossRef]
- Zhang, L.; Prieur, C. Stochastic stability of Markov jump hyperbolic systems with application to traffic flow control. Automatica 2017, 86, 29–37. [Google Scholar] [CrossRef] [Green Version]
- Krasovskii, N.M.; Lidskii, E.A. Analytical design of controllers in systems with random attributes. Autom. Remote Control 1961, 22, 1021–2025. [Google Scholar]
- Bolzern, P.; Colaneri, P.; De Nicolao, G. Stochastic stability of positive Markov jump linear systems. Automatica 2014, 50, 1181–1187. [Google Scholar] [CrossRef]
- Hou, T.; Ma, H. Exponential stability for discrete-time infinite Markov jump systems. IEEE Trans. Autom. Control 2016, 61, 4241–4246. [Google Scholar] [CrossRef]
- Huang, H.; Long, F.; Li, C. Stabilization for a class of Markovian jump linear systems with linear fractional uncertainties. Int. J. Innov.Comput. Inf. Control 2015, 11, 295–307. [Google Scholar]
- Wang, B.; Zhu, Q.X. Stability analysis of discrete-time semi-Markov jump linear systems with partly unknown semi-Markov kernel. Syst. Control Lett. 2020, 140, 104688. [Google Scholar] [CrossRef]
- Shen, M.; Park, J.H.; Ye, D. A separated approach to control of Markov jump nonlinear systems with general transition probabilities. IEEE Trans. Cybern. 2016, 46, 2010–2018. [Google Scholar] [CrossRef]
- Oliveira, A.M.D.; Costa, O.L.V. Mixed H2/H∞ control of hidden Markov jump systems. Int. J. Robust Nonlinear Control 2018, 28, 1261–1280. [Google Scholar] [CrossRef]
- Aberkane, S.; Dragan, V. H∞ filtering of periodic Markovian jump systems: Application to filtering with communication constraints. Automatica 2012, 48, 3151–3156. [Google Scholar] [CrossRef]
- Shen, Y.; Wu, Z.G.; Shi, P.; Su, H.Y.; Lu, R. Dissipativity-based asynchronous filtering for periodic Markov jump systems. Inf. Sci. 2017, 420, 505–516. [Google Scholar] [CrossRef]
- Sun, Q.; Lim, C.; Shi, P.; Liu, F. Moving horizon estimation for Markov jump systems. Inf. Sci. 2016, 367, 143–158. [Google Scholar] [CrossRef]
- Tao, J.; Lu, R.; Shi, P.; Su, H.; Wu, Z.G. Dissipativity-based reliable control or fuzzy Markov jump systems with actuator faults. IEEE Trans. Cybern. 2017, 47, 2377–2388. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Q.; Chao, J. Exponential stability of stochastic neural networks with both Markovian jump parameters and mixed time delays. IIEEE Trans. Syst. Man Cybern. Part B 2011, 41, 341–353. [Google Scholar] [CrossRef]
- Cheng, J.; Park, J.H.; Karimi, H.R.; Shen, H. A flexible terminal approach to sampled-data exponentially synchronization of Markovian neural networks with time-varying delayed signals. IEEE Trans. Cybern. 2017, 48, 2232–2234. [Google Scholar] [CrossRef] [Green Version]
- Dai, M.C.; Xia, J.W.; Xia, H.; Shen, H. Event-triggered passive synchronization for Markov jump neural networks subject to randomly occurring gain variations. Neurocomputing 2018, 331, 403–411. [Google Scholar] [CrossRef]
- Li, Z.X.; Su, H.Y.; Gu, Y.; Wu, Z.G. H∞ filtering for discrete-time singular networked systems with communication delays and data missing. Int. J. Syst. Sci. 2013, 44, 604–614. [Google Scholar] [CrossRef]
- Zha, L.; Fang, J.; Liu, J.; Tian, E. Event-based finite-time state estimation for Markovian jump systems with quantizations and randomly occurring nonlinear perturbations. ISA Trans. 2017, 66, 77–85. [Google Scholar] [CrossRef]
- Chen, H.Y.; Li, Z.X.; Xia, W.F. Event-triggered dissipative filter design for semi-Markovian jump systems with time-varying delays. Math. Probl. Eng. 2020, 2020, 8983403. [Google Scholar] [CrossRef] [Green Version]
- Xia, W.F.; Xu, S.Y.; Lu, J.W.; Li, Y.M.; Chu, Y.M.; Zhang, Z.Q. Event-triggered filtering for discrete-time Markovian jump systems with additive time-varying delays. Appl. Math. Comput. 2021, 391, 125630. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, Y.; Shi, P.; Zhao, Y. Resilient asynchronous H∞ filtering for Markov jump neural networks with unideal measurements and multiplicative noises. IEEE Trans. Cybern. 2015, 45, 2840–2852. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Lu, R.; Peng, H.; Xie, K.; Xue, A. Asynchronous dissipative state estimation for stochastic complex networks with quantized jumping coupling and uncertain measurements. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 268–277. [Google Scholar] [CrossRef] [PubMed]
- Shen, Y.; Wu, Z.G.; Shi, P.; Huang, T.W. Asynchronous filtering for Markov jump neural networks with quantized outputs. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 433–443. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Hamdan, M.M. Fundamental issues in networked control systems. IEEE/CAA J. Autom. Sin. 2018, 5, 902–922. [Google Scholar] [CrossRef]
- Lunze, J.; Lehmann, D. A state-feedback approach to event-based control. Automatica 2010, 46, 211–215. [Google Scholar] [CrossRef]
- Guan, Y.; Han, Q.; Ge, X. On asynchronous event-triggered control of decentralized networked systems. Inf. Sci. 2018, 425, 127139. [Google Scholar] [CrossRef]
- Zhang, X.; Han, Q. Event-based H∞ filtering for sampled data systems. Automatica 2015, 51, 55–69. [Google Scholar] [CrossRef]
- Ding, D.; Wang, Z.; Han, Q. A set-membership approach to event-triggered filtering for general nonlinear systems over sensor networks. IEEE Trans. Autom. Control 2020, 65, 1792–1799. [Google Scholar] [CrossRef]
- Li, H.; Zuo, Z.; Wang, Y. Event triggered control for Markovian jump systems with partially unknown transition probabilities and actuator saturation. J. Frankl. Inst. 2016, 358, 1848–1861. [Google Scholar] [CrossRef]
- Ma, R.J.; Shao, X.G.; Liu, J.X.; Wu, L. Event-triggered sliding mode control of Markovian jump systems against input saturation. Syst. Control. Lett. 2019, 134, 104525. [Google Scholar] [CrossRef]
- Wang, H.J.; Shi, P.; Agarwal, R.K. Network-based event-triggered filtering for Markovian jump systems. Int. J. Control 2016, 89, 1096–1110. [Google Scholar] [CrossRef]
- Wu, H.N.; Cai, K.Y. Mode-independent robust stabilization for uncertain Markovian jump nonlinear systems via fuzzy control. IEEE Trans. Cybern. 2005, 36, 509–519. [Google Scholar] [CrossRef]
- Souza, C.E.d.; Trofino, A.; Barbosa, K.A. Mode-independent H∞ filters for Markovian jump linear systems. IEEE Trans. Autom. Control 2006, 51, 1837–1841. [Google Scholar] [CrossRef]
- Shi, P.; Yin, Y.; Liu, F.; Zhang, J. Robust control on saturated markov jump systems with missing information. Inf. Sci. 2014, 265, 123–138. [Google Scholar] [CrossRef]
- Shen, H.; Li, F.; Wu, Z.; Park, J. Finite-time L2-L∞ tracking control for Markov jump repeated scalar nonlinear systems with partly usable model information. Inf. Sci. 2016, 332, 153–166. [Google Scholar] [CrossRef]
- Wu, Z.G.; Shi, P.; Shu, Z.; Su, H.; Lu, R. Passivity-based asynchronous control for Markov jump systems. IEEE Trans. Autom. Control 2017, 62, 2020–2025. [Google Scholar] [CrossRef] [Green Version]
- Yao, D.Y.; Lu, R.Q.; Xu, Y.; Wang, L.J. Robust H∞ filtering for Markov jump systems with mode-dependent quantized output and partly unknown transition probabilities. Signal Processing 2017, 137, 328–338. [Google Scholar] [CrossRef]
- Wang, Y.Q.; An, Q.C.; Wang, R.H.; Zhang, S.Y. Reliable control for event-triggered singular Markov jump systems with partly unknown transition probabilities and actuator faults. J. Frankl. Inst. 2019, 356, 1828–1855. [Google Scholar] [CrossRef]
- Zhang, L.X.; Boukas, E.K. Mode-dependent H∞ filtering for filtering for discrete-time Markovian jump linear systems with partly unknown transition probabilities. Automatica 2009, 45, 1462–1467. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Liang, J.; Liu, X. Stability and synchronization of discrete-time Markovian jumping neural networks with mixed mode-dependent time delays. IEEE Trans. Neural Netw. 2009, 20, 1102–1116. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boyd, S.; Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory. Proc. IEEE 1994, 86, 2473–2474. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CPM | |||||
|---|---|---|---|---|---|
| TPM | 0.5437 | 0.5524 | 0.6300 | 0.6386 | |
| 0.5498 | 0.5588 | 0.6393 | 0.6489 | ||
| 0.5806 | 0.5884 | 0.6733 | 0.6784 | ||
| 0.6319 | 0.6379 | 0.7440 | 0.7441 | ||
| CPM | |||||
|---|---|---|---|---|---|
| TPM | 0.4791 | 0.4912 | 0.5249 | 0.5437 | |
| 0.5104 | 0.5219 | 0.5644 | 0.5806 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Liu, R.; Xia, W.; Li, Z. Event-Triggered Filtering for Delayed Markov Jump Nonlinear Systems with Unknown Probabilities. Processes 2022, 10, 769. https://doi.org/10.3390/pr10040769
Chen H, Liu R, Xia W, Li Z. Event-Triggered Filtering for Delayed Markov Jump Nonlinear Systems with Unknown Probabilities. Processes. 2022; 10(4):769. https://doi.org/10.3390/pr10040769
Chicago/Turabian StyleChen, Huiying, Renwei Liu, Weifeng Xia, and Zuxin Li. 2022. "Event-Triggered Filtering for Delayed Markov Jump Nonlinear Systems with Unknown Probabilities" Processes 10, no. 4: 769. https://doi.org/10.3390/pr10040769