1. Introduction
The environmental noise can greatly degrade the listening quality when enjoying music with headphones. Compared with increasing the music level to mask the annoying noise, designing noise-proof headphones generally offers a better way to overcome this problem. Although passive strategies are efficient to block noise at relatively high frequencies, residual low-frequency noise remains a problem with limited volumes and weights in real applications. Active noise control (ANC) [
1,
2] offers a solution to deal with such low-frequency residual noises, whose application in headphones has been investigated for decades. Both feedforward [
3,
4,
5] and feedback [
6,
7,
8] controllers can be considered to design an ANC headphone, whose effectiveness was confirmed. Compared with traditional adaptive algorithms, fixed controllers designed with cascade biquad filters [
5,
7,
8] have much lower computational complexities. This generally indicates a lowered cost together with a lengthened battery life, which is crucial for commercial products. Meanwhile, the sampling frequency can also be enhanced, leading to a lowered latency with which the limitation on the control performance could be alleviated. To the best of the authors’ knowledge, in recent years various commercial chips specially designed for headphones have integrated cascade biquad or IIR filters as the internal ANC controllers, which could lead to wide applications for ANC headphones.
Compared with a feedforward ANC controller [
3,
4,
5], more attention should be paid to the audio system when using a feedback controller [
6,
7,
8]. Since the error microphone can pick up the audio signal played by the speaker, the low-frequency components of the audio signal will also be attenuated together with the environmental noise [
1]. This problem can be overcome by the usage of an FIR model of the secondary path [
9,
10], with which the audio signal component picked up by the error microphone can be estimated and then subtracted from the error signal. With a secondary path model without modeling errors, the audio signal component of the error signal would be totally neutralized and thus the audio system would not be affected by the ANC system. An online secondary path identification scheme can further be considered in which the audio signal is used as a natural stimulus. This method can be extended to other ANC areas with feedback controllers, such as infant incubators [
11], hearing aids [
12], or even road noise control in vehicles [
13]. Moreover, it was reported that virtual bass enhancement could also be considered as another technique to enhance the audio quality of the ANC headphones [
14].
Although the audio compensation method with an FIR model of the secondary path was proven to be effective, it cannot be directly used in commercial ANC headphone chips where only biquad or IIR filters are available. Perkmann and Tiefenthaler [
15] proposed a similar scheme for audio compensation. In their patent, the FIR model is replaced with one or more lowpass filters, which can be realized with cascade biquad or IIR filters. However, no audio compensation results were given. Generally speaking, there is still a lack of audio compensation methods for feedback ANC headphones with the usage of cascade biquad filters, which is indispensable for commercial products. This is the main motivation for this work.
In this paper, an optimization process is proposed for the audio compensation of feedback ANC headphones, where the compensation filter is constructed with cascade biquad filters. Instead of identifying the secondary path with an IIR model, an objective function corresponding to the audio compensation performance is established, with which the optimal cascade biquad filters are searched. In the proposed optimization process, the biquad filter is parameterized into three prototypes, and both the prototypes and the corresponding parameters are automatically optimized. The differential evolution (DE) [
16,
17] algorithm is used to find the optimal solution, whose efficiency was confirmed by the optimization of feedforward ANC controllers [
5], as well as the feedback ones [
8]. Compared with the methods presented in [
5,
7,
8], where only two prototypes of biquad filters are used and the combinations of filter prototypes are just set by experiences, the proposed method could address more flexibility in the optimization process. In
Section 2, both a classical IIR identification method and the proposed method are described in detail. Simulations and experiments are further carried out in
Section 3, whose results show that the proposed method is more efficient than the existing methods.
3. Results
In this section, experiments are carried out to evaluate the presented methods.
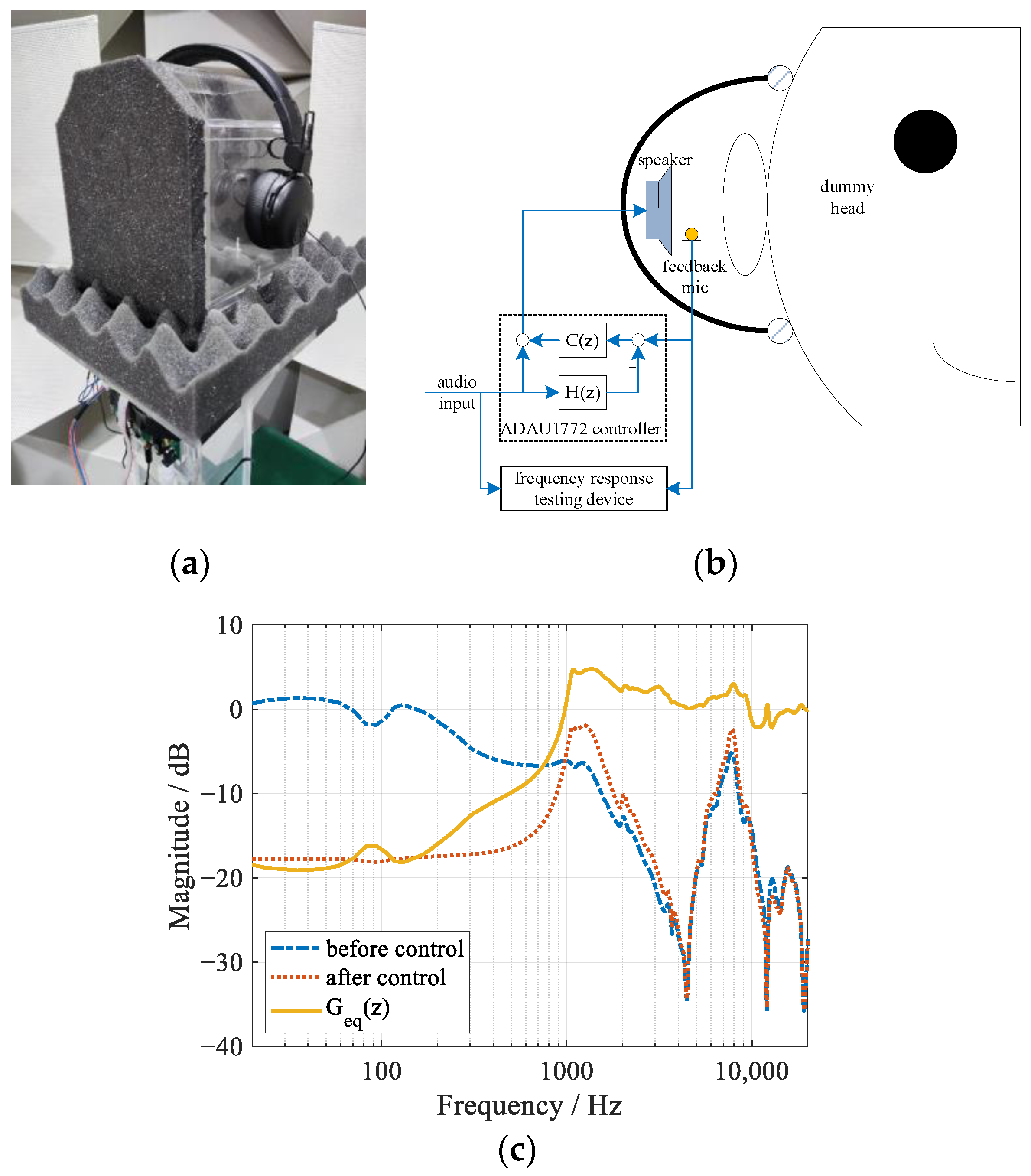
Figure 2a,b show the experimental setup, where a self-designed dummy head is used together with a commercial feedback ANC headphone. The feedback microphone and the speaker of the ANC headphone are wired to an outside controller with an ADAU1772 chip as its processor, as shown in
Figure 2b. Both the feedback controller C(z) and the compensation filter H(z) are implemented inside this processor, within which the sampling frequency is set to 192 kHz. For the feedback controller, a previous design result in [
8] is used here, with which the primary noise could be effectively attenuated. However, the response of the audio system, which is the system between the audio input signal and the output signal of the feedback microphone, will also be altered by this feedback controller. In the experimental system, an external device is used to test the frequency response of the audio system with white noise as the stimulus, as shown in
Figure 2b.
Figure 2c compares the magnitude responses of the audio system before and after the feedback controller is turned on. It can be seen that, without audio compensation (H(z) = 0), the low-frequency components of the audio signal are attenuated just as the primary noise, while some high-frequency components would be enhanced because of the waterbed effect [
1]. The difference between these two responses is given as the yellow line in
Figure 2c at the same time, which is also the magnitude response of G
eq(z) without audio compensation. Meanwhile, it is further noted that this curve is theoretically identical to the noise reduction performance of the feedback controller with respect to the primary noise.
In order to get rid of the influence caused by the feedback controller, the conventional method with an FIR model of the secondary path is first evaluated. Using the recorded input (white noise) and output of the secondary path, a full-length FIR model (filter order M = 1000) is obtained with the LMS algorithm, whose result is shown in
Figure 3a. Since the computational complexity is rather high, different truncations of this FIR model (i.e., just taking the first M coefficients of the full-length model) are used for the audio compensation, whose results are illustrated in
Figure 3b–e.
Figure 3b,c compare the magnitude and phase responses of the truncated FIR models with the original responses of the secondary path. It can be seen that the modeling accuracy increases as M becomes higher. The modeling errors mainly appear within the low-frequency band, which results from the relatively low-frequency resolution of the truncated FIR models. With these truncated FIR models, the audio compensation performance is further shown in
Figure 3d, where the magnitude responses of the audio system are illustrated. This compensated response should be close to the original secondary path S(z) as much as possible so that the audio system would not be affected by the feedback control system. In fact, the compensated audio response would be identical to the original S(z) if an accurate model is used as the compensation filter. However, there would still be some compensation errors because of the inevitable modeling errors. It can be seen that, although the audio system is less affected by the feedback control system compared with
Figure 2c, the audio responses still mismatch with the original one at low frequencies, which is a natural result of the relatively large modeling errors within this frequency range.
Figure 3e shows the magnitude response of G
eq(z), which can be regarded as compensation errors. It can be observed that large compensation errors mainly appear at low frequencies, which would decrease as the filter order M becomes higher. A good compensation performance can be obtained when M reaches 400.
Next, the secondary path is identified with IIR models using the method presented in
Section 2.1. In order to enhance the modeling accuracy within the low-frequency band where the degradation of the audio system is significant, pink noise is used as the stimulus for the identification process. With the recorded input and output signals of the secondary path, the auto-correlation and cross-correlation functions are estimated first. Then, IIR models with different orders M can be obtained by solving the Wiener–Hopf equation shown in (6). It is noted that this M-order IIR model could be realized by N = M/2 cascade biquad filters in applications.
Figure 4a,b show the magnitude and phase responses of the obtained IIR models, respectively, which are compared with the original response of the secondary path S(z). It can be found that the modeling accuracy increases when the filter order becomes higher. With these IIR models, the compensation performance for the audio system can be calculated, whose results are shown in
Figure 4c,d.
Figure 4c gives the compensated magnitude responses of the audio system with feedback control. Compared with
Figure 3c, it can be observed that the compensation performance at low frequencies is enhanced but relatively large mismatches still appear around 1 kHz.
Figure 4d illustrates the corresponding compensation errors. It can be observed that the compensation errors could be restricted within ±3.5 dB with a 4th-order IIR model. With more accurate models, however, the compensation errors show greater peak values at about 1 kHz. This indicates that the modeling errors have different influences on the compensation performance at different frequencies, which is not considered in the identification process. When the IIR filter order becomes relatively large, the compensation errors can be reduced to a low level, since an IIR model with enough accuracy could be obtained in this case.
The averaged absolute values of the compensation errors are further calculated for both FIR and IIR models, whose results are shown in
Figure 5. It can be observed from
Figure 5a that generally, the averaged error decreases as the order increases for both cases. For the truncated FIR models, a good performance could be expected with M greater than 300. For the IIR models, in order for a good compensation performance, more than 30 biquad filters (M > 60) should be used.
The compensation performance is further compared with respect to the computational complexity in
Figure 5b. The required number of multiplications is evaluated here since it is generally more time-consuming than additions. For an M-order FIR filter, M multiplications are needed. For an M-order IIR filter, which is realized with N = M/2 cascade biquad filters, the number of multiplications is 2.5 M since each biquad filter needs five multiplications. It can be observed from
Figure 5b that, with similar performance, the computational complexity is larger if truncated FIR models are used. Although the computational complexity is relatively low for IIR models, the required number of biquad filters still seems too large to be realized by a low-cost ANC processor such as ADAU1772, considering that an effective feedback controller can be constructed with only three to five biquad filters [
7,
8].
In order for a good compensation performance with fewer biquad filters, the optimization problem proposed in
Section 2.2 is solved using the DE algorithm with respect to different numbers of biquad filters. In the objective function, G
eq(z) is evaluated at 300 discrete frequencies f
k, which are chosen logarithmically from 20 Hz to 20 kHz. All the weighting coefficients w
k are set to 1, which addresses the same significance to the compensation performance over the whole audio frequency band. The searching intervals for tp
i, g
i, f
i, Q
i and Gain are bounded within [0, 3], [−40, 40] dB, [20, 20k] Hz, [0.1, 3.0] and [−40, 40] dB, respectively. The punishment intensity ξ is set to 10,000. In the DE algorithm, Cr, F, and NP are set to 1, 0.85, and 100, respectively. For each case of N, 100 times repeat of the DE algorithm is conducted to avoid local minimums. In every single run, the DE algorithm stops searching after 20,000 iterations. For each case of N, the learning curve of the DE algorithm corresponding to the optimal solution is shown in
Figure 6. It can be seen that the DE algorithm would converge to a lower value of the objective function if N becomes higher. Although the algorithm does not appear to be fully converged for the case of N = 6, a better solution could still be found. The obtained results are listed in
Table 1. It can be found that lowpass filters seem to be necessary for each case of N, while peak/notch or shelf filters are optional. The reason might lie in the non-minimum phase response of H
2(z), which is similar to the secondary path. It can also be seen that the combinations of filter types are different from case to case. It is for this reason that the filter types are designed to be variables in the proposed optimization method. Moreover, this optimization strategy with variable filter types could also be considered for the design of feedforward [
5] and feedback [
8] controllers.
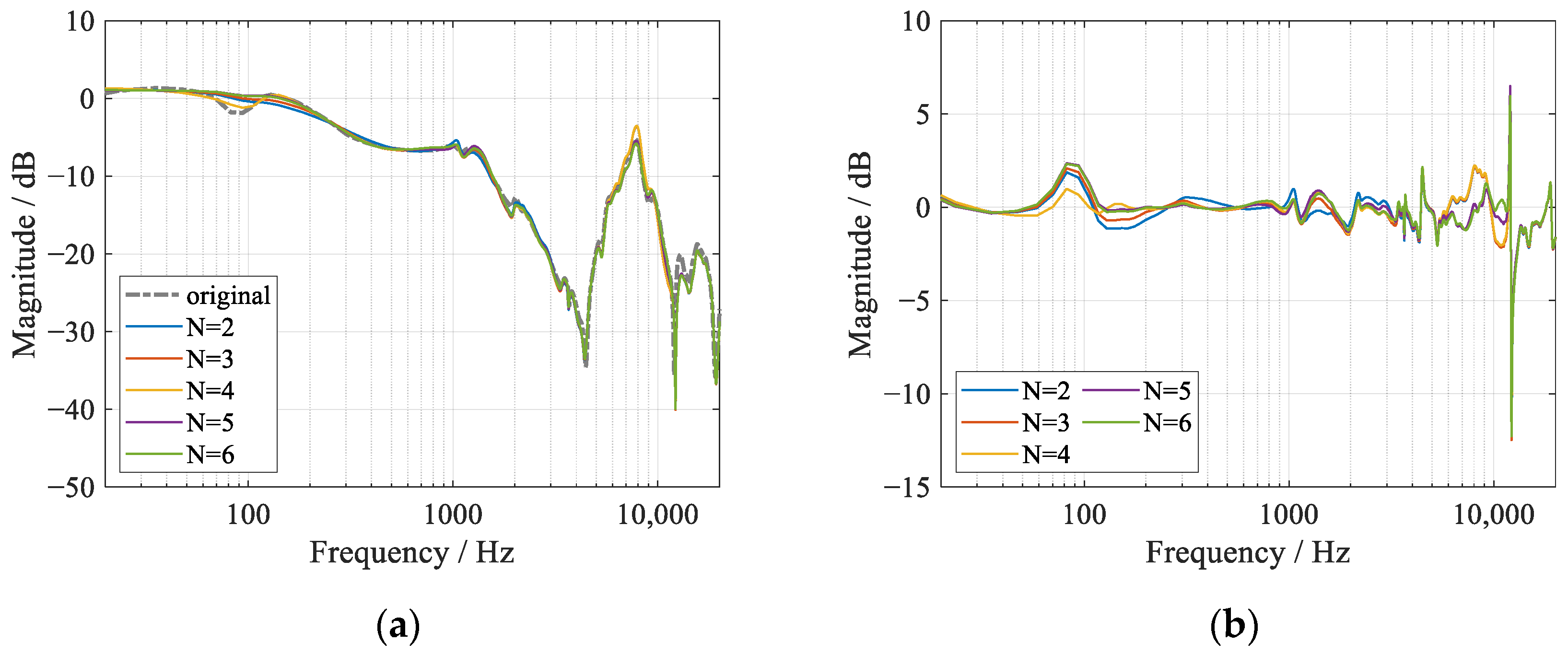
Figure 7a,b show the magnitude and phase responses of the compensation filter H(z) with N = 2, 3, 4, 5, 6, and
Figure 7c,d show the compensated audio responses, as well as the corresponding compensation errors. It can be observed that the compensation filter still tries to model the secondary path, especially within the frequency band below about 3 kHz. Within this frequency range, the control performance of the feedback controller could be considered to be obvious. Compared with
Figure 4, it can be observed that the modeling accuracy here is much higher within this frequency range, which results in better compensation performances, as shown in
Figure 7c,d. With fewer biquad filters (N = 2, 3, 4), H(z) is essentially a low-pass filter and the audio components are attenuated above 3 kHz. If N increases to 5 and 6, however, H(z) has extra abilities to model the peak response within (5, 10) kHz of the secondary path. As a result, a better compensation performance within this frequency range could be obtained. It can be seen from
Figure 7c that, with the optimized compensation biquad filters, the audio responses with feedback control are in high accordance with the original secondary path S(z), which indicates the influence of the feedback controller on the audio system was successfully depressed.
Similar to the case with FIR and IIR models, the averaged compensation errors are calculated and compared in
Figure 5. It can be found that with the same number of biquad filters, the proposed optimization method behaves much better than using an identified IIR model. Meanwhile, an averaged error of about 0.5 dB can be obtained with only two to five biquad filters. The corresponding computational complexity is the lowest compared with the other two methods if a similar performance is assumed to be achieved, which is beneficial for real applications. Although using more biquad filters can lead to better performance, the DE algorithm might have more difficulties in finding the global minimum when N is greater than 6, as indicated in
Figure 6. On the other hand, by comparing the performance with the 1000-order FIR model in
Figure 5, it can be expected that, when N > 6, the performance would not be enhanced obviously even if the global optimum solutions were found. Consequently, two to five biquad filters are suggested based on the results obtained in this paper, which are proven to be adequate to achieve good performance for the audio compensation.
Finally, the coefficients of the designed compensation filters are downloaded into ADAU1772, and the responses of the audio system after compensation are tested as illustrated in
Figure 2b, whose results are shown in
Figure 8a.
Figure 8b shows the corresponding compensation errors with respect to the original response of the secondary path. It can be found that the experiment results match the simulation results very well, although relatively large errors appear at about 12 kHz, which mainly result from the drift of the corresponding notch frequency of the secondary path response.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}