
Close-Enough Facility Location


Abstract
:1. Introduction
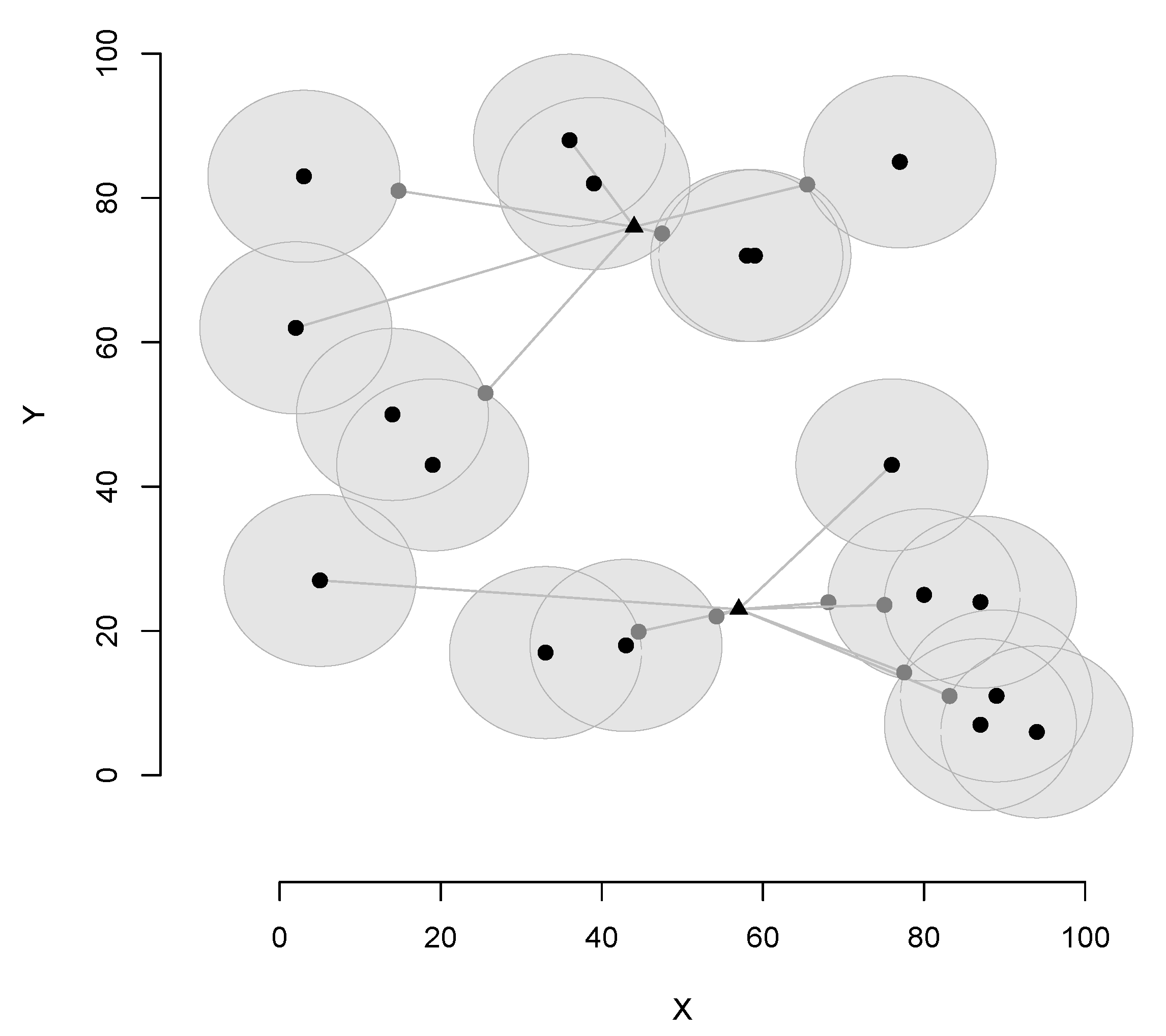
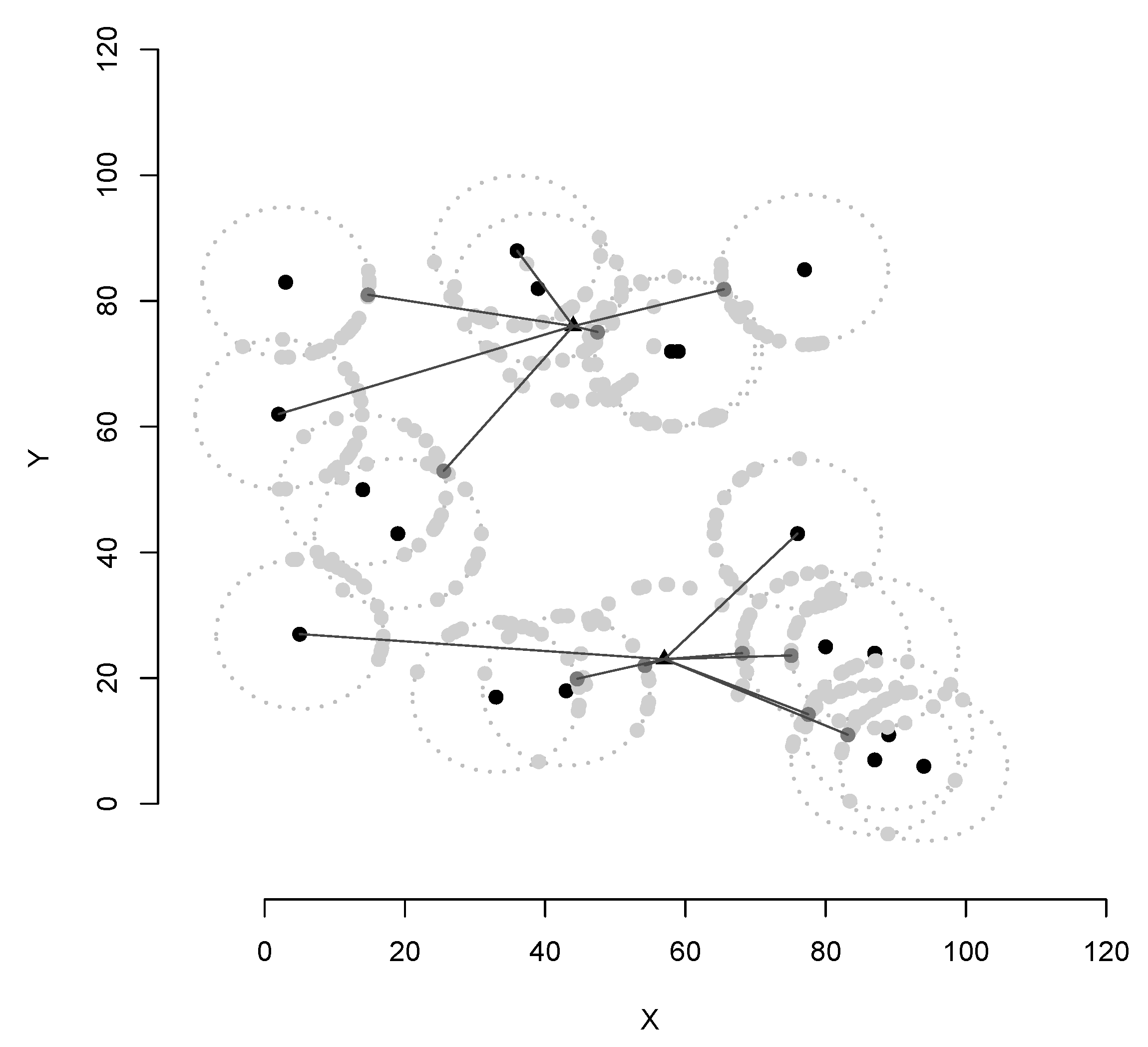
2. Optimal Pickup Locations
- for some
- for some
- belongs to for certain and is on the border of .
- is not in for all .
- and, for all
3. Notation and Variables
- Sets
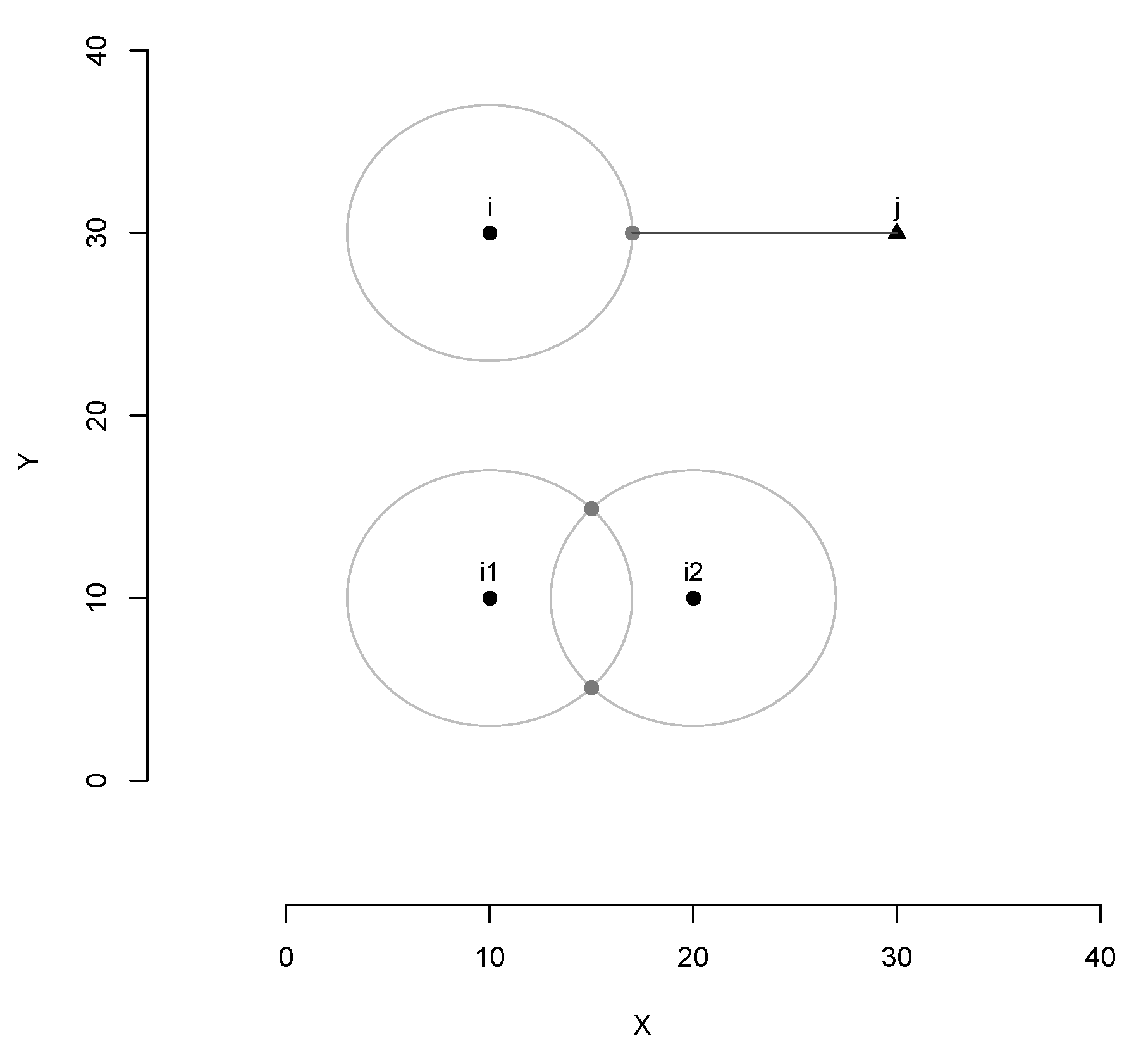
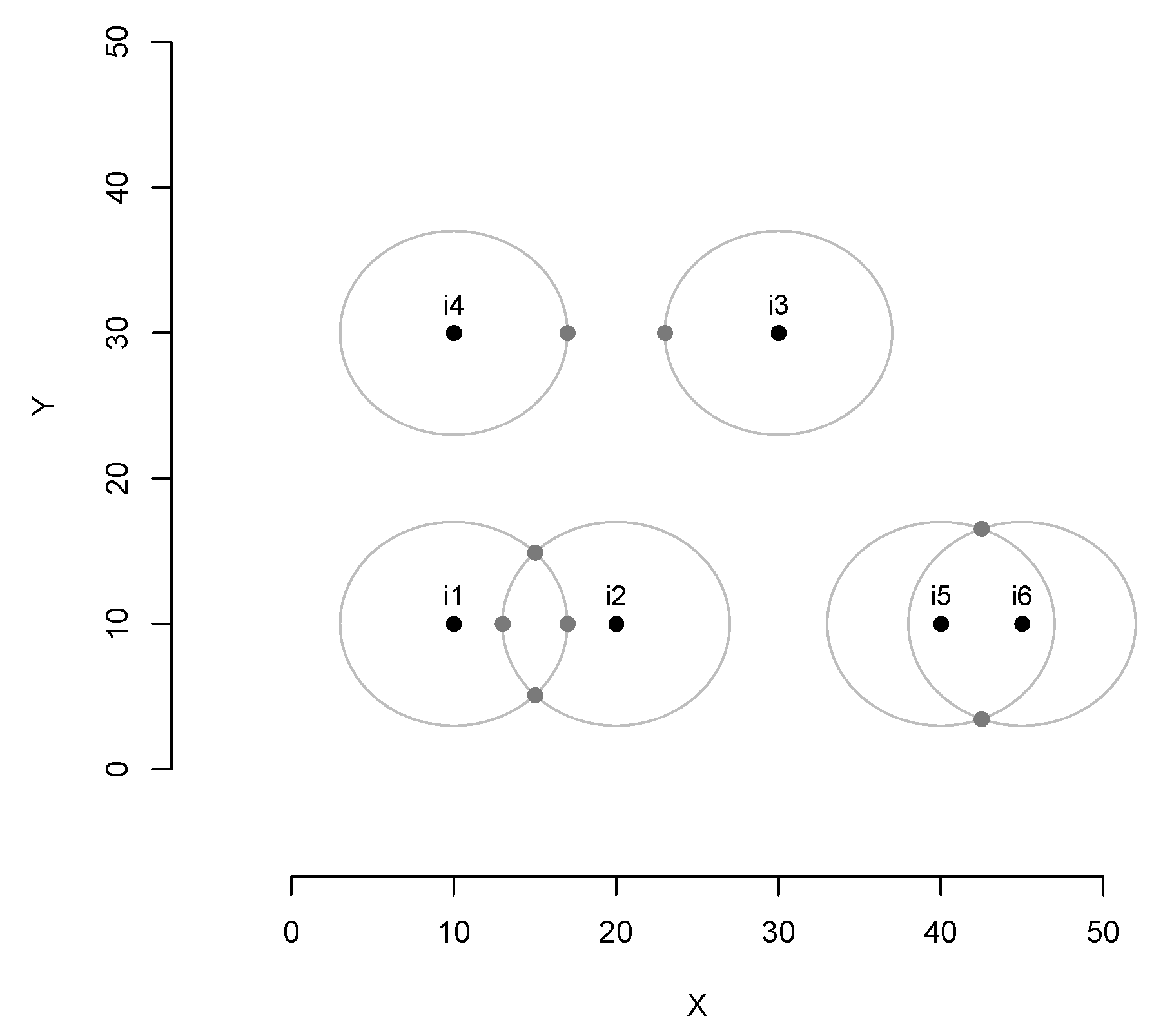
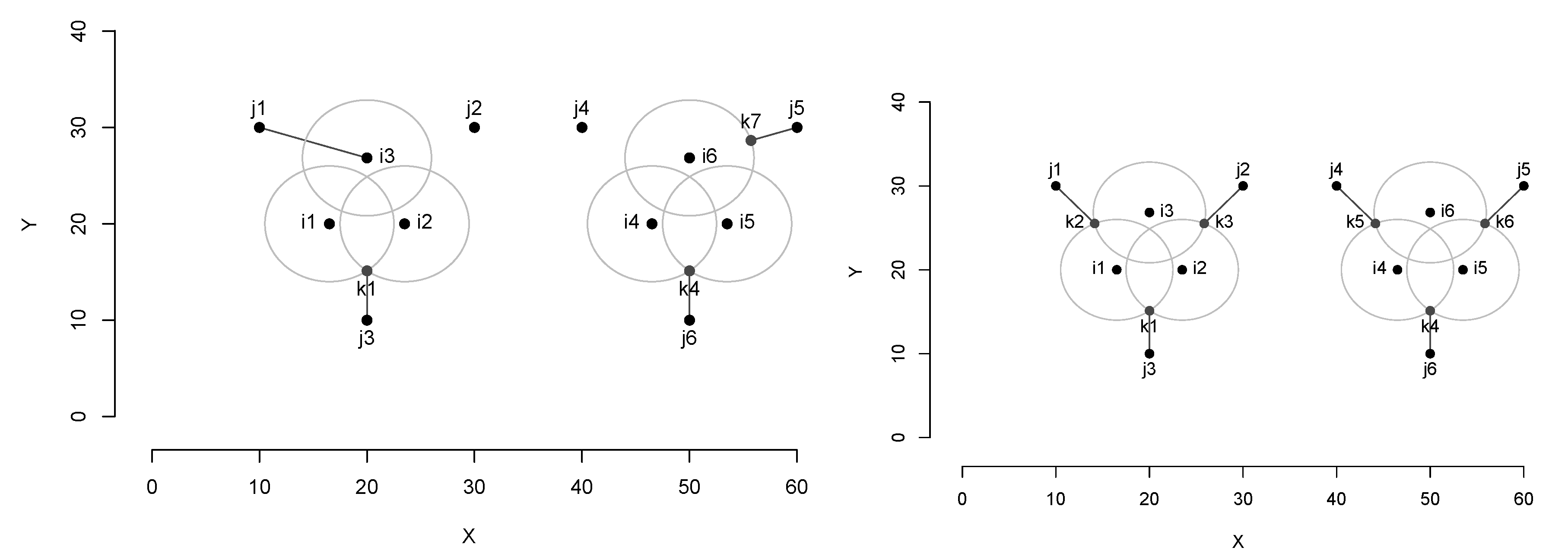
- K is the set of candidate pickup points induced by Proposition 1, that is, it is the set of circumference intersections and segment-circumference intersections.
- For all is the subset of K that customer i could benefit from, is the set of elements k of K such that and might overlap and K is the union of for all
- For all is the subset of in the border, that is, the set of elements k of K such that
- For all is the set of customers that are willing to move to that is,
- Parameters
- For all is the demand of customer
- For all is the distance that customer i is willing to travel for picking up his demand. It is named R when for all
- For each is the distance between i and
- For each is the distance between k and
- Variables
- For all is 1 if facility j is open.
- For all is 1 if the pickup point k is installed.
- For all is 1 if customer i is allocated to facility j,
- For all , is 1 if customer i moves to the pickup location
- For all is the demand supported by facility j through the pickup point
- For all is 1 if customer i moves to the pickup location k and facility j serves the pickup point represents that customer i is directly served from facility j and thus, does not move to any pickup point.
The Binary Integer Variables
4. Mixed-Integer Linear Two-Index Formulation
Polyhedral Enhancement
5. Mixed-Integer Linear Three-Index Formulation
Branch and Price Algorithm
| Algorithm 1: Branch and price algorithm |
 |
6. Computational Results
6.1. Optimization Models Results
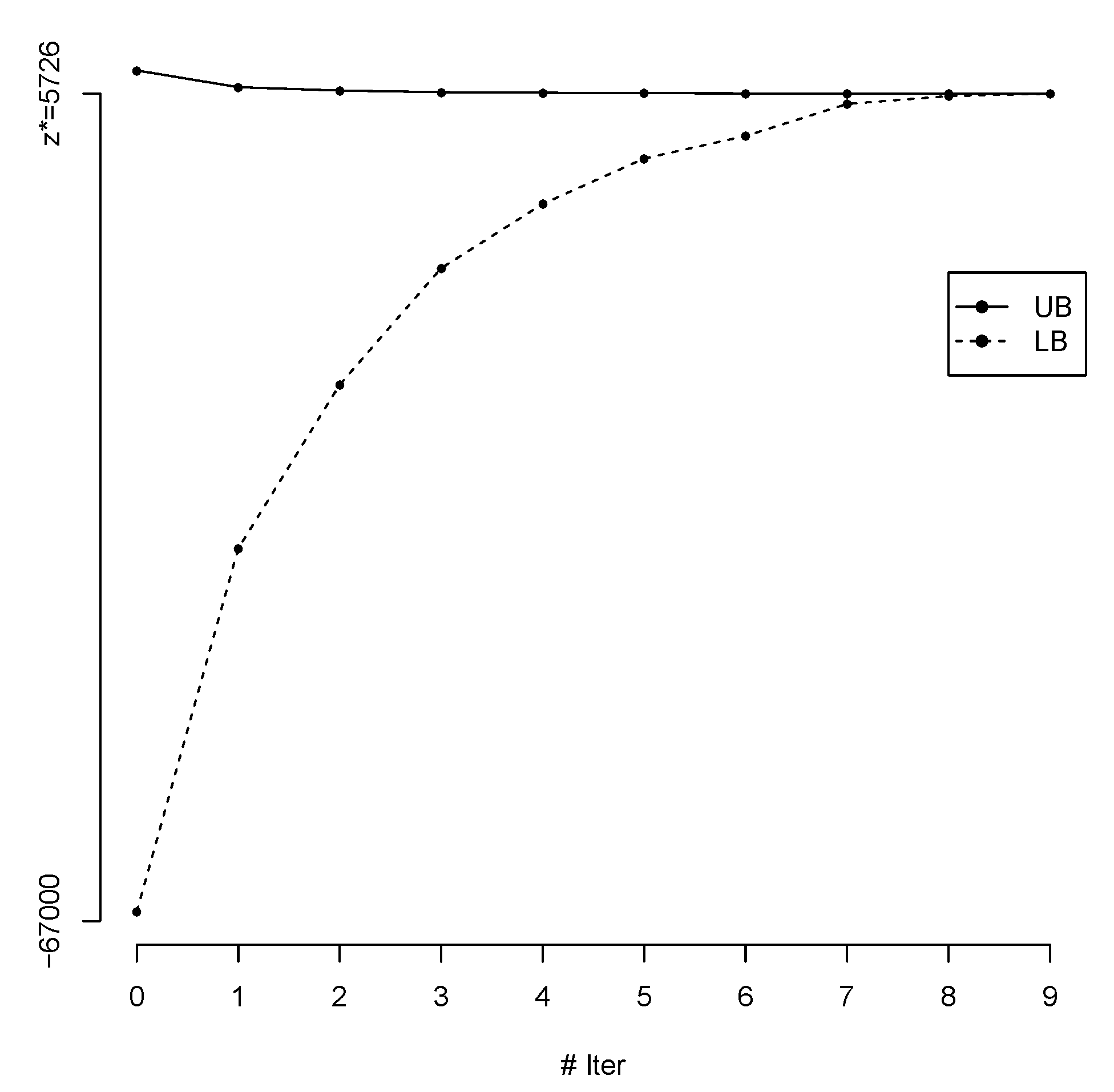
6.2. Branch and Price Algorithm Results
7. Final Remarks
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Laporte, G.; Nickel, S.; Saldanha-da-Gama, F. Location Science, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Gulczynski, D.; Heath, J.; Price, C. The Close Enough Traveling Salesman Problem: A Discussion of Several Heuristics. In Perspectives in Operations Research; Alt, F., Fu, M., Golden, B., Eds.; Operations Research/Computer Science Interfaces Series; Springer: Boston, MA, USA, 2006; pp. 271–283. [Google Scholar]
- Dong, J.; Yang, N.; Chen, M. Heuristic Approaches for a TSP Variant: The Automatic Meter Reading Shortest Tour Problem. In Extending the Horizons: Advances in Computing, Optimization, and Decision Technologies; Operations Research/Computer Science Interfaces Series; Baker, E.K., Joseph, A., Mehrotra, A., Trick, M., Eds.; Springer: Boston, MA, USA, 2007. [Google Scholar]
- Shuttleworth, R.; Golden, B.; Smith, S.; Wasil, E. Advances in Meter Reading: Heuristic Solution of the Close Enough Traveling Salesman Problem over a Street Network. In Operations Research/Computer Science Interfaces; Golden, B., Raghavan, S., Wasil, E., Eds.; Springer: Boston, MA., USA, 2008. [Google Scholar]
- Yuan, B.; Orlowska, M.; Sadiq, S. On the optimal robot routing problem in wireless sensor networks. IEEE Trans. Knowl. Data Eng. 2007, 19, 1252–1261. [Google Scholar] [CrossRef] [Green Version]
- Corberán, A.; Landete, M.; Peiró, J.; Saldanha-da-Gama, F. The facility location problem with capacity transfers. Transp. Res. Part E Logist. Transp. 2020, 138, 1366–5545. [Google Scholar] [CrossRef]
- Landete, M.; Laporte, G. Facility location problems with user cooperation. TOP 2019, 27, 125–145. [Google Scholar] [CrossRef]
- Raghavan, S.; Sahin, M.; Salman, F. The capacitated mobile facility location problems. Eur. J. Oper. Res. 2019, 277, 507–520. [Google Scholar] [CrossRef]
- Friggstad, Z.; Salavatipour, M.R. Minimizing Movement in Mobile Facility Location Problems. In Proceedings of the 2008 49th Annual IEEE Symposium on Foundations of Computer Science, Philadelphia, PA, USA, 25–28 October 2008; pp. 357–366. [Google Scholar]
- Halper, R.; Raghavan, S.; Sahin, M. Local search heuristics for the mobile facility location problem. Comput. Oper. Res. 2015, 62, 210–223. [Google Scholar] [CrossRef]
- Hernández-Pérez, H.; Landete, M.; Rodríguez-Martín, I. The single-vehicle two-echelon one-commodity pickup and delivery problem. Comput. Oper. Res. 2021, 127, 105152. [Google Scholar] [CrossRef]
- Alumur, S.A.; Kara, B.Y.; Melo, M.T. Location and Logistics In Location Science; Springer: Boston, MA, USA, 2015; pp. 419–441. [Google Scholar]
- Espejo, I.; Puerto, J.; Rodríguez-Chía, A. A comparative study of different formulations for the capacitated discrete ordered median problem. Comput. Oper. Res. 2021, 125, 105067. [Google Scholar] [CrossRef]
- Leitner, M.; Ljubic, I.; Salazar-González, J.J.; Sinnl, M. The connected facility location polytope. Discret. Appl. Math. 2018, 234, 151–167. [Google Scholar] [CrossRef] [Green Version]
- Hamacher, H.W.; Labbé, M.; Nickel, S.; Sonneborn, T. Adapting polyhedral properties from facility to hub location problems. Discret. Appl. Math. 2004, 145, 104–116. [Google Scholar] [CrossRef]
- Merakli, M.; Yaman, H. A capacitated hub location problem under hose demand uncertainty. Comput. Oper. Res. 2017, 88, 58–70. [Google Scholar] [CrossRef]
- Baumgartner, S. Polyhedral Analysis of Hub Center Problems. Master’s Thesis, Universität Kaiserslautern, Kaiserslautern, Germany, 2003. [Google Scholar]
- Corberán, A.; Landete, M.; Peiró, J.; Saldanha-da-Gama, F. Improved polyhedral descriptions and exact procedures for a broad class of uncapacitated p-hub median problems. Transp. Res. Part B Methodol. 2019, 123, 38–63. [Google Scholar] [CrossRef]
- Deleplanque, S.; Labbe, M.; Ponce, D.; Puerto, J. A branch-price-and-cut procedure for the discrete ordered Median problem. INFORMS J. Comput. 2020, 32, 582–599. [Google Scholar] [CrossRef] [Green Version]
- Blanco, V.; Japón, A.; Ponce, D.; Puerto, J. On the multisource hyperplanes location problem to fitting set of points. Comput. Oper. Res. 2021, 128, 105124. [Google Scholar] [CrossRef]
- Fernández, E.; Kalcsics, J.; Nez-del Toro, C.N. A branch-and-price algorithm for the Aperiodic Multi-Period Service Scheduling Problems. Eur. J. Oper. Res. 2017, 263, 805–814. [Google Scholar] [CrossRef] [Green Version]
- García, S.; Labbé, M.; Marín, A. Solving large p-median problems with a radius formulation. INFORMS J. Comput. 2011, 23, 546–556. [Google Scholar] [CrossRef]
- Contreras, I.; Díaz, J.; Fernández, E. Branch and price for large-scale capacitated hub location problems with single assignment. INFORMS J. Comput. 2011, 23, 41–55. [Google Scholar] [CrossRef] [Green Version]
- Osman, I.H.; Christofides, N. Capacitated Clustering Problems by Hybrid Simulated Annealing and Tabu Search. 1994. Available online: http://people.brunel.ac.uk/~mastjjb/jeb/orlib/pmedcapinfo.html (accessed on 21 January 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instance | Data Instances | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| n | p | t | R | m | m | |||||
| i1 | 10 | 2 | 3 | 2.69 | 90 | 312 | 300 | 1000 | 202 | 1100 |
| i2 | 20 | 2 | 10 | 2.98 | 382 | 1253 | 1231 | 8040 | 831 | 8982 |
| i3 | 30 | 3 | 10 | 2.98 | 874 | 2821 | 2789 | 27120 | 1887 | 30454 |
| i4 | 35 | 3 | 10 | 2.98 | 1196 | 3841 | 3804 | 43085 | 2575 | 48411 |
| i5 | 40 | 4 | 10 | 2.98 | 1568 | 5047 | 5005 | 64320 | 3399 | 73488 |
| i6 | 50 | 4 | 10 | 2.98 | 2462 | 7885 | 7833 | 125600 | 5323 | 143562 |
| i7 | 55 | 4 | 10 | 3.25 | 2984 | 9550 | 9493 | 167145 | 6456 | 191634 |
| i8 | 60 | 4 | 10 | 3.25 | 3560 | 11493 | 11431 | 217200 | 7813 | 256280 |
| i9 | 65 | 4 | 10 | 3.25 | 4186 | 13552 | 13485 | 276315 | 9236 | 329836 |
| i10 | 70 | 4 | 10 | 3.25 | 4858 | 15765 | 15693 | 344960 | 10767 | 415478 |
| i11 | 75 | 4 | 10 | 3.25 | 5588 | 18152 | 18075 | 424725 | 12414 | 514688 |
| i12 | 80 | 4 | 10 | 3.25 | 6362 | 20645 | 20563 | 515360 | 14123 | 624122 |
| i13 | 85 | 4 | 10 | 3.25 | 7190 | 23366 | 23279 | 618375 | 16006 | 753490 |
| i14 | 90 | 4 | 10 | 3.25 | 8068 | 26555 | 26463 | 734220 | 18307 | 926608 |
| i15 | 100 | 4 | 10 | 3.25 | 9974 | 33197 | 33095 | 1007400 | 23023 | 1312174 |
| i16 | 10 | 2 | 3 | 5.39 | 92 | 328 | 316 | 1020 | 216 | 1242 |
| i17 | 20 | 2 | 10 | 5.96 | 394 | 1408 | 1386 | 8280 | 974 | 11854 |
| i18 | 30 | 3 | 10 | 5.96 | 894 | 3139 | 3107 | 27720 | 2185 | 39414 |
| i19 | 35 | 3 | 10 | 5.96 | 1222 | 4304 | 4267 | 43995 | 3012 | 63732 |
| i20 | 40 | 4 | 10 | 5.96 | 1608 | 5806 | 5764 | 65920 | 4118 | 102288 |
| i21 | 50 | 4 | 10 | 5.96 | 2522 | 9165 | 9113 | 128600 | 6543 | 204622 |
| i22 | 55 | 4 | 10 | 6.51 | 3092 | 11693 | 11636 | 173085 | 8491 | 303667 |
| i23 | 60 | 4 | 10 | 6.51 | 3686 | 14299 | 14237 | 224760 | 10493 | 417206 |
| i24 | 65 | 4 | 10 | 6.51 | 4332 | 17253 | 17186 | 285805 | 12791 | 561057 |
| i25 | 70 | 4 | 10 | 6.51 | 5030 | 20297 | 20225 | 357000 | 15127 | 720850 |
| i26 | 75 | 4 | 10 | 6.51 | 5774 | 23633 | 23556 | 438675 | 17709 | 911999 |
| i27 | 80 | 4 | 10 | 6.51 | 6570 | 27116 | 27034 | 532000 | 20386 | 1125370 |
| i28 | 85 | 4 | 10 | 6.51 | 7424 | 30973 | 30886 | 638265 | 23379 | 1380429 |
| i29 | 90 | 4 | 10 | 6.51 | 8322 | 35594 | 35502 | 757080 | 27092 | 1717512 |
| i30 | 100 | 4 | 10 | 6.51 | 10294 | 45371 | 45269 | 1039400 | 34877 | 2497894 |
| i31 | 10 | 2 | 3 | 10.77 | 94 | 352 | 340 | 1040 | 238 | 1464 |
| i32 | 20 | 2 | 10 | 11.92 | 420 | 1786 | 1764 | 8800 | 1326 | 18920 |
| i33 | 30 | 3 | 10 | 11.92 | 962 | 4299 | 4267 | 29760 | 3277 | 72242 |
| i34 | 35 | 3 | 10 | 11.92 | 1306 | 5976 | 5939 | 46935 | 4600 | 119396 |
| i35 | 40 | 4 | 10 | 11.92 | 1724 | 8513 | 8471 | 70560 | 6709 | 206044 |
| i36 | 50 | 4 | 10 | 11.92 | 2704 | 14364 | 14312 | 137700 | 11560 | 455654 |
| i37 | 55 | 4 | 10 | 13.01 | 3324 | 19843 | 19786 | 185845 | 16409 | 739389 |
| i38 | 60 | 4 | 10 | 13.01 | 3978 | 25449 | 25387 | 242280 | 21351 | 1068978 |
| i39 | 65 | 4 | 10 | 13.01 | 4664 | 31095 | 31028 | 307385 | 26301 | 1439539 |
| i40 | 70 | 4 | 10 | 13.01 | 5420 | 37459 | 37387 | 384300 | 31899 | 1895280 |
| i41 | 75 | 4 | 10 | 13.01 | 6256 | 45666 | 45589 | 474825 | 39260 | 2528806 |
| i42 | 80 | 4 | 10 | 13.01 | 7094 | 52542 | 52460 | 573920 | 45288 | 3118054 |
| i43 | 85 | 4 | 10 | 13.01 | 7992 | 60791 | 60704 | 686545 | 52629 | 3867247 |
| i44 | 90 | 4 | 10 | 13.01 | 8964 | 70554 | 70462 | 814860 | 61410 | 4806774 |
| i45 | 100 | 4 | 10 | 13.01 | 11086 | 93774 | 93672 | 1118600 | 82488 | 7259786 |
| i46 | 10 | 2 | 3 | 16.16 | 106 | 433 | 421 | 1160 | 307 | 2166 |
| i47 | 20 | 2 | 10 | 17.88 | 442 | 2203 | 2181 | 9240 | 1721 | 26842 |
| i48 | 30 | 3 | 10 | 17.88 | 1032 | 6064 | 6032 | 31860 | 4972 | 123162 |
| i49 | 35 | 3 | 10 | 17.88 | 1396 | 8617 | 8580 | 50085 | 7151 | 208771 |
| i50 | 40 | 4 | 10 | 17.88 | 1844 | 12645 | 12603 | 75360 | 10721 | 366644 |
| i51 | 50 | 4 | 10 | 17.88 | 2862 | 21290 | 21238 | 145600 | 18328 | 794212 |
| i52 | 55 | 4 | 10 | 19.52 | 3636 | 34148 | 34091 | 203005 | 30402 | 1509316 |
| i53 | 60 | 4 | 10 | 19.52 | 4352 | 44494 | 44432 | 264720 | 40022 | 2189612 |
| i54 | 65 | 4 | 10 | 19.52 | 5116 | 55680 | 55613 | 336765 | 50434 | 3008636 |
| i55 | 70 | 4 | 10 | 19.52 | 5972 | 69046 | 68974 | 422940 | 62934 | 4068282 |
| i56 | 75 | 4 | 10 | 19.52 | 6866 | 84296 | 84219 | 520575 | 77280 | 5380916 |
| i57 | 80 | 4 | 10 | 19.52 | 7822 | 98965 | 98883 | 632160 | 90983 | 6774382 |
| i58 | 85 | 4 | 10 | 19.52 | 8794 | 114545 | 114458 | 754715 | 105581 | 8368969 |
| i59 | 90 | 4 | 10 | 19.52 | 9896 | 135054 | 134962 | 898740 | 124978 | 10528826 |
| i60 | 100 | 4 | 10 | 19.52 | 12222 | 181436 | 181334 | 1232200 | 169014 | 15913522 |
| Instance | (15) | (16) | (17)+(18) | (19) | (15)+…+(18) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| % | % | % | % | % | % | % | |||||||||
| i1 | 1600.86 | 1 | 62.90 | 0 | 62.90 | 1 | 61.65 | 0 | 62.00 | 1 | 62.90 | 0 | 61.65 | 0.00 | 0.00 |
| i2 | 4771.03 | 88 | 82.26 | 28 | 82.26 | 12 | 81.79 | 46 | 82.15 | 72 | 82.26 | 10 | 81.79 | 0.00 | 0.00 |
| i3 | 5364.57 | 485 | 65.32 | 550 | 65.32 | 223 | 64.61 | 981 | 64.98 | 3926 | 65.32 | 323 | 64.61 | 1.00 | 0.00 |
| i4 | 6534.84 | 1032 | 60.08 | 1153 | 60.08 | 1418 | 58.60 | 3699 | 59.48 | 4633 | 60.08 | 1279 | 58.60 | 1.00 | 0.00 |
| i5 | 5359.16 | 3463 | 52.99 | 7069 | 52.99 | 5747 | 51.97 | 7200 | 52.57 | 7200 | 52.99 | 4916 | 51.97 | 2.00 | 0.00 |
| i16 | 1493.16 | 0 | 58.06 | 1 | 58.06 | 0 | 56.68 | 1 | 57.29 | 0 | 58.06 | 0 | 56.68 | 0.00 | 0.00 |
| i17 | 4309.60 | 70 | 85.63 | 75 | 85.63 | 22 | 85.28 | 88 | 85.62 | 44 | 85.63 | 21 | 85.28 | 0.00 | 0.00 |
| i18 | 4837.41 | 764 | 67.28 | 1135 | 67.28 | 979 | 66.64 | 1344 | 67.10 | 2056 | 67.28 | 831 | 66.64 | 1.00 | 0.00 |
| i19 | 6011.42 | 7200 | 66.29 | 1715 | 66.29 | 3177 | 65.25 | 4335 | 66.03 | 5331 | 66.29 | 1793 | 65.25 | 1.00 | 0.00 |
| i20 | 4681.10 | 7200 | 58.20 | 7200 | 58.19 | 7200 | 56.80 | 7200 | 57.91 | 7200 | 58.19 | 7034 | 56.80 | 2.00 | 0.00 |
| i31 | 1258.92 | 0 | 41.82 | 1 | 41.82 | 0 | 39.30 | 1 | 41.41 | 1 | 41.82 | 0 | 39.30 | 0.00 | 0.00 |
| i32 | 3369.58 | 99 | 84.53 | 127 | 84.39 | 48 | 82.54 | 92 | 84.53 | 89 | 84.53 | 28 | 81.98 | 1.00 | 0.00 |
| i33 | 1891.92 | 1965 | 91.69 | 5566 | 91.69 | 1902 | 89.98 | 1446 | 91.69 | 2162 | 91.69 | 3667 | 89.97 | 2.00 | 0.29 |
| i34 | 2666.33 | 4788 | 92.61 | 7200 | 91.93 | 4850 | 91.39 | 2843 | 92.61 | 3670 | 92.61 | 5135 | 91.29 | 5.00 | 1.71 |
| i35 | 2896.84 | 7200 | 74.80 | 7200 | 74.73 | 7202 | 71.64 | 7200 | 74.75 | 7200 | 74.82 | 7200 | 71.27 | 8.00 | 0.64 |
| i46 | 1011.21 | 1 | 58.04 | 1 | 58.04 | 1 | 54.90 | 0 | 58.04 | 1 | 58.04 | 1 | 54.90 | 0.00 | 0.00 |
| i47 | 2366.60 | 49 | 90.95 | 75 | 90.89 | 22 | 89.01 | 87 | 90.95 | 55 | 90.95 | 40 | 88.94 | 0.00 | 0.00 |
| i48 | 1891.92 | 1936 | 91.69 | 5529 | 91.69 | 1888 | 89.98 | 1371 | 91.69 | 2154 | 91.69 | 3687 | 89.97 | 2.00 | 0.00 |
| i49 | 2666.33 | 4800 | 92.61 | 7200 | 91.93 | 4937 | 91.39 | 2747 | 92.61 | 3556 | 92.61 | 5055 | 91.29 | 8.00 | 1.92 |
| i50 | 1297.19 | 7200 | 90.54 | 7200 | 89.18 | 7200 | 88.23 | 7200 | 90.54 | 7200 | 90.54 | 7200 | 87.61 | 7.00 | 0.00 |
| Instance | GR | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| % | % | iter | %k | % | |||||||
| i1 | 1600.86 | 0 | 0.00 | 0.00 | 1600.85 | 1592.82 | 3 | 23.33 | 0 | 0.50 | 1.000 |
| i2 | 4771.04 | 0 | 0.00 | 0.00 | 4771.61 | 4759.71 | 4 | 20.68 | 0 | 0.25 | 1.000 |
| i3 | 5364.58 | 1 | 0.00 | 0.00 | 5364.58 | 5323.41 | 4 | 11.33 | 1 | 0.77 | 1.000 |
| i4 | 6534.84 | 1 | 0.00 | 0.00 | 6534.96 | 6491.49 | 4 | 9.62 | 2 | 0.67 | 1.000 |
| i5 | 5359.18 | 2 | 0.00 | 0.00 | 5359.48 | 5312.66 | 4 | 6.76 | 1 | 0.87 | 1.000 |
| i6 | 7000.77 | 3 | 0.00 | 0.00 | 7000.76 | 6962.17 | 5 | 5.48 | 2 | 0.55 | 1.000 |
| i7 | 9603.38 | 4 | 0.00 | 0.00 | 9620.99 | 9561.90 | 4 | 4.66 | 3 | 0.61 | 0.998 |
| i8 | 10150.86 | 4 | 0.00 | 0.00 | 10161.99 | 10113.48 | 4 | 4.33 | 4 | 0.48 | 0.999 |
| i9 | 11798.25 | 7 | 0.00 | 0.00 | 11810.42 | 11753.49 | 4 | 4.18 | 6 | 0.48 | 0.999 |
| i10 | 12546.57 | 12 | 0.00 | 0.04 | 12558.48 | 12461.86 | 3 | 3.05 | 6 | 0.77 | 0.999 |
| i11 | 13111.45 | 17 | 0.00 | 0.05 | 13119.66 | 13046.49 | 3 | 2.86 | 9 | 0.56 | 0.999 |
| i12 | 14274.46 | 22 | 0.00 | 0.04 | 14282.22 | 14212.70 | 3 | 2.62 | 11 | 0.49 | 0.999 |
| i13 | 15692.30 | 20 | 0.00 | 0.00 | 15699.67 | 15592.85 | 3 | 2.53 | 10 | 0.68 | 1.000 |
| i14 | 16957.89 | 29 | 0.00 | 0.00 | 16969.49 | 16854.53 | 3 | 2.40 | 15 | 0.68 | 0.999 |
| i15 | 18268.59 | 40 | 0.00 | 0.00 | 18286.17 | 18116.97 | 3 | 2.30 | 17 | 0.93 | 0.999 |
| i16 | 1493.16 | 0 | 0.00 | 0.00 | 1493.16 | 1493.04 | 4 | 27.17 | 0 | 0.01 | 1.000 |
| i17 | 4309.62 | 0 | 0.00 | 0.00 | 4309.60 | 4290.34 | 5 | 24.11 | 0 | 0.45 | 1.000 |
| i18 | 4837.43 | 1 | 0.00 | 0.00 | 4837.41 | 4814.42 | 5 | 13.42 | 1 | 0.48 | 1.000 |
| i19 | 6011.45 | 1 | 0.00 | 0.00 | 6011.44 | 5975.46 | 4 | 9.57 | 1 | 0.60 | 1.000 |
| i20 | 4681.11 | 2 | 0.00 | 0.00 | 4681.09 | 4654.04 | 4 | 6.72 | 1 | 0.58 | 1.000 |
| i21 | 6305.05 | 6 | 0.00 | 0.30 | 6305.02 | 6259.47 | 5 | 6.11 | 3 | 0.72 | 1.000 |
| i22 | 8828.11 | 9 | 0.00 | 0.12 | 8828.07 | 8798.12 | 4 | 5.56 | 5 | 0.34 | 1.000 |
| i23 | 9267.65 | 15 | 0.00 | 0.01 | 9267.63 | 9206.66 | 4 | 4.99 | 7 | 0.66 | 1.000 |
| i24 | 10790.93 | 23 | 0.00 | 0.12 | 10790.89 | 10723.01 | 4 | 4.66 | 10 | 0.63 | 1.000 |
| i25 | 11447.20 | 27 | 0.00 | 0.00 | 11447.16 | 11425.13 | 4 | 4.10 | 13 | 0.19 | 1.000 |
| i26 | 12055.98 | 50 | 0.00 | 0.26 | 12060.39 | 11956.46 | 4 | 4.33 | 17 | 0.86 | 1.000 |
| i27 | 13219.74 | 66 | 0.00 | 0.11 | 13219.70 | 13164.98 | 4 | 4.05 | 21 | 0.41 | 1.000 |
| i28 | 14471.91 | 73 | 0.00 | 0.00 | 14471.80 | 14354.60 | 4 | 3.74 | 23 | 0.81 | 1.000 |
| i29 | 15745.76 | 234 | 0.00 | 0.20 | 15745.65 | 15583.45 | 4 | 3.85 | 43 | 1.03 | 1.000 |
| i30 | 16959.35 | 310 | 0.00 | 0.11 | 16959.28 | 16871.14 | 4 | 2.88 | 55 | 0.52 | 1.000 |
| i31 | 1258.93 | 0 | 0.00 | 0.00 | 1258.93 | 1258.36 | 3 | 26.60 | 0 | 0.05 | 1.000 |
| i32 | 3369.60 | 1 | 0.00 | 0.00 | 3369.58 | 3346.01 | 5 | 22.62 | 0 | 0.70 | 1.000 |
| i33 | 3362.89 | 2 | 0.00 | 0.29 | 3362.88 | 3347.11 | 6 | 15.49 | 2 | 0.47 | 1.000 |
| i34 | 4458.54 | 5 | 0.00 | 1.71 | 4458.53 | 4376.95 | 5 | 12.71 | 3 | 1.83 | 1.000 |
| i35 | 2896.83 | 8 | 0.00 | 0.64 | 2903.19 | 2873.44 | 4 | 7.77 | 4 | 1.02 | 0.998 |
| i36 | 4162.12 | 20 | 0.00 | 0.19 | 4162.09 | 4149.79 | 5 | 7.77 | 9 | 0.30 | 1.000 |
| i37 | 6062.25 | 58 | 0.00 | 1.13 | 6062.24 | 5987.31 | 5 | 7.46 | 20 | 1.24 | 1.000 |
| i38 | 6061.98 | 94 | 0.00 | 0.00 | 6061.99 | 6052.23 | 5 | 6.91 | 21 | 0.16 | 1.000 |
| i39 | 7390.02 | 202 | 0.00 | 0.51 | 7390.02 | 7320.83 | 5 | 6.78 | 43 | 0.94 | 1.000 |
| i40 | 7804.28 | 248 | 0.00 | 0.00 | 7804.25 | 7794.15 | 5 | 6.51 | 63 | 0.13 | 1.000 |
| i41 | 8242.77 | 370 | 0.00 | 0.45 | 8242.75 | 8158.03 | 5 | 5.93 | 98 | 1.03 | 1.000 |
| i42 | 9406.53 | 527 | 0.00 | 0.32 | 9406.51 | 9315.12 | 6 | 6.55 | 219 | 0.97 | 1.000 |
| i43 | 10301.57 | 960 | 0.00 | 0.42 | 10301.55 | 10258.50 | 6 | 5.67 | 212 | 0.42 | 1.000 |
| i44 | 11477.28 | 5005 | 0.00 | 1.65 | 11487.01 | 11253.92 | 7 | 6.36 | 679 | 2.03 | 0.999 |
| i45 | 21758.80 | 7200 | 43.04 | 43.04 | 12516.76 | 12311.39 | 7 | 6.05 | 1454 | 1.64 | 1.738 |
| i46 | 1011.21 | 0 | 0.00 | 0.00 | 1011.21 | 1011.21 | 3 | 22.64 | 0 | 0.00 | 1.000 |
| i47 | 2366.58 | 0 | 0.00 | 0.00 | 2366.58 | 2360.26 | 5 | 21.95 | 1 | 0.27 | 1.000 |
| i48 | 1891.93 | 2 | 0.00 | 0.00 | 1891.92 | 1883.47 | 5 | 13.57 | 2 | 0.45 | 1.000 |
| i49 | 2666.35 | 8 | 0.00 | 1.92 | 2666.34 | 2614.44 | 6 | 13.75 | 6 | 1.95 | 1.000 |
| i50 | 1297.19 | 7 | 0.00 | 0.00 | 1297.16 | 1295.34 | 5 | 10.52 | 6 | 0.14 | 1.000 |
| i51 | 1940.13 | 20 | 0.00 | 0.00 | 1940.11 | 1937.68 | 6 | 9.54 | 16 | 0.13 | 1.000 |
| i52 | 2791.39 | 233 | 0.00 | 6.78 | 2791.36 | 2602.21 | 8 | 10.64 | 122 | 6.78 | 1.000 |
| i53 | 2715.34 | 299 | 0.00 | 6.63 | 2719.01 | 2532.23 | 7 | 9.21 | 141 | 6.87 | 0.999 |
| i54 | 3600.35 | 1368 | 0.00 | 9.22 | 3617.04 | 3268.32 | 8 | 9.25 | 322 | 9.64 | 0.995 |
| i55 | 3829.49 | 1484 | 0.00 | 8.13 | 3842.71 | 3517.26 | 8 | 8.94 | 497 | 8.47 | 0.997 |
| i56 | 3779.41 | 1410 | 0.00 | 4.18 | 3780.68 | 3608.18 | 7 | 7.76 | 463 | 4.56 | 1.000 |
| i57 | 4560.92 | 6181 | 0.00 | 6.05 | 4562.18 | 4277.17 | 8 | 7.99 | 1271 | 6.25 | 1.000 |
| i58 | 4844.79 | 4086 | 0.00 | 4.24 | 4844.73 | 4639.30 | 9 | 7.70 | 1779 | 4.24 | 1.000 |
| i59 | 47146.58 | 7200 | 100.00 | 89.16 | 5438.35 | 5093.18 | 8 | 7.12 | 2623 | 6.35 | 8.669 |
| i60 | 57708.76 | 7200 | 100.00 | 90.08 | 5995.50 | 5726.92 | 9 | 6.92 | 5717 | 4.48 | 9.625 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moya-Martínez, A.; Landete, M.; Monge, J.F. Close-Enough Facility Location. Mathematics 2021, 9, 670. https://doi.org/10.3390/math9060670
Moya-Martínez A, Landete M, Monge JF. Close-Enough Facility Location. Mathematics. 2021; 9(6):670. https://doi.org/10.3390/math9060670
Chicago/Turabian StyleMoya-Martínez, Alejandro, Mercedes Landete, and Juan Francisco Monge. 2021. "Close-Enough Facility Location" Mathematics 9, no. 6: 670. https://doi.org/10.3390/math9060670