
High-Performance Tracking for Piezoelectric Actuators Using Super-Twisting Algorithm Based on Artificial Neural Networks

 , , , ,
, , , ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Hardware Description
2.2. Hysteresis and References Used
2.3. Control Design and Performance Metrics Used
2.4. PID Control
2.5. Super Twisting Algorithm Based on ANNs
Neural Network Compensation Detailed
2.6. Stability Proof
3. Results
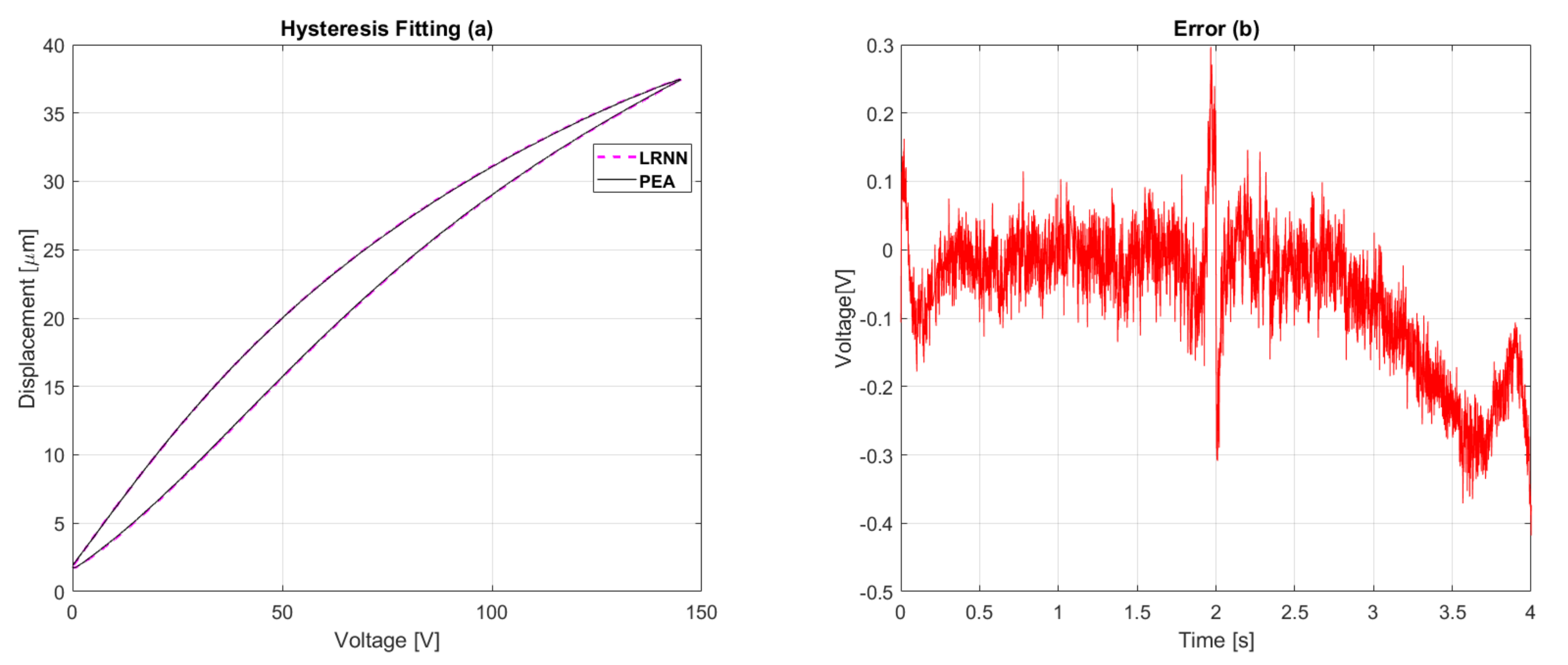
3.1. LRRN Training Results
3.2. Tracking Control Results
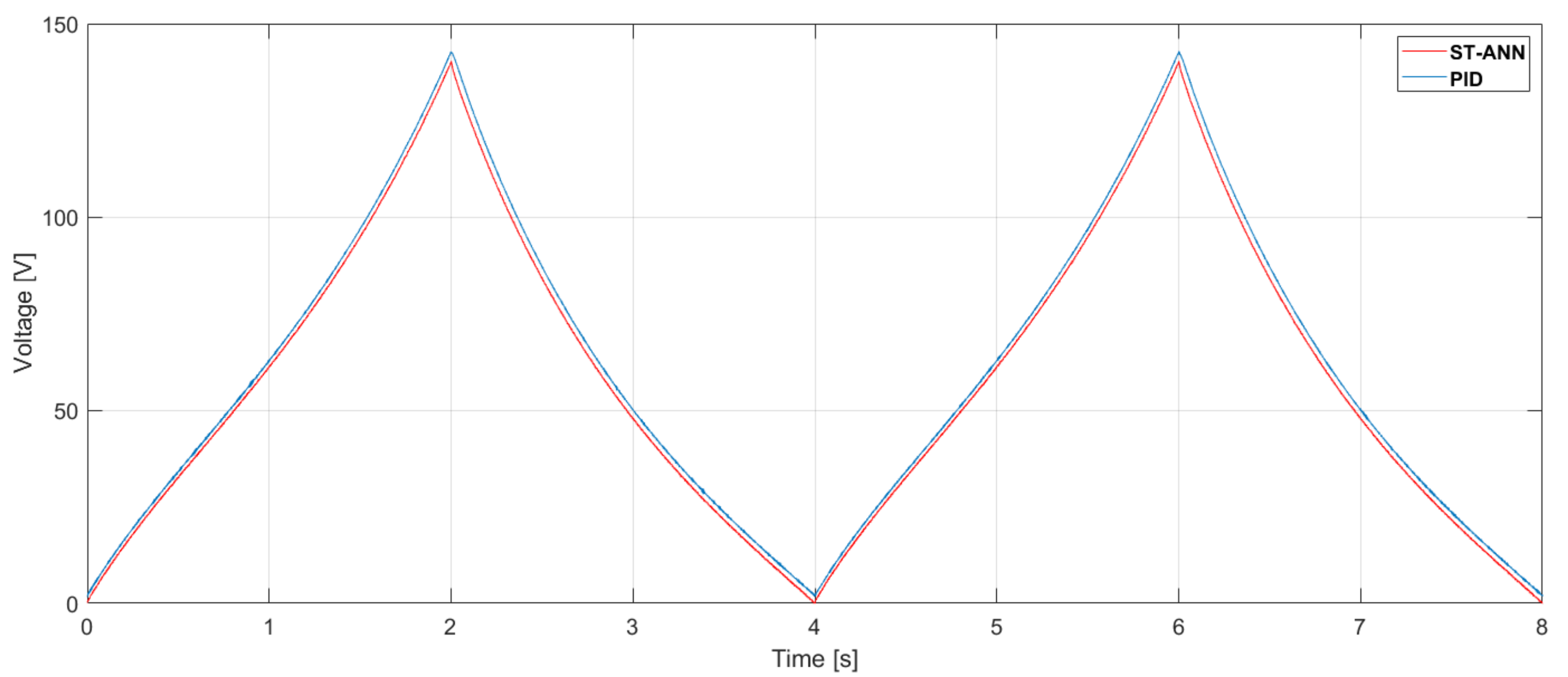
3.3. Triangle Reference Comparisons
3.4. Sine Reference Comparisons
3.5. Performance Metrics Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PEA | Piezoelectric Actuator |
| STA | Super-twisting Algorithm |
| ANN | Artificial Neural Network |
| PID | Proportional-integral-derivative |
| BW | Bouc-Wen |
| SMC | Sliding Mode Control |
| ISMC | Integral Sliding Mode Control |
| HOSMC | High Order Sliding Mode Control |
| RTI | Real-Time Interface |
| IAE | Integral of the absolute error |
| RMSE | Root mean squared of the error |
| RRMSE | Relative mean squared of the error |
| TDNN | Time Delay Neural Network |
| LRNN | Layer Recurrent Neural Network |
References
- Arnold, S.; Pertsch, P.; Spanner, K. Piezoelectric Positioning. In Piezoelectricity: Evolution and Future of a Technology; Springer: Berlin/Heidelberg, Germany, 2008; pp. 279–297. [Google Scholar] [CrossRef]
- Liseli, J.B.; Agnus, J.; Lutz, P.; Rakotondrabe, M. An Overview of Piezoelectric Self-Sensing Actuation for Nanopositioning Applications: Electrical Circuits, Displacement, and Force Estimation. IEEE Trans. Instrum. Meas. 2020, 69, 2–14. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P. Sensors and actuators. In Advanced Industrial Control Technology; Chapter 3; Zhang, P., Ed.; Elsevier: Amsterdam, The Netherlands, 2010; pp. 73–116. [Google Scholar] [CrossRef]
- Takashi, O.; Norikazu, O. Power-Efficient Driver Circuit for Piezo Electric Actuator with Passive Charge Recovery. Energies 2020, 13, 2866. [Google Scholar] [CrossRef]
- Arena, M.; Viscardi, M. SISO Piezo Based Circuit Development for Active Structural Vibration Control. Fluids 2020, 5, 183. [Google Scholar] [CrossRef]
- Ryndzionek, R.; Sienkiewicz, L.; Michna, M.; Kutt, F. Design and Experiments of a Piezoelectric Motor Using Three Rotating Mode Actuators. Sensors 2019, 19, 5184. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karumuri, S.; Hamza, M.; Puli, A.; Sravani, G. Design and optimization of MEMS based piezoelectric actuator for drug delivery systems. Microsyst. Technol. 2019, 26. [Google Scholar] [CrossRef]
- Fu, Y.; Luo, J.; Flewitt, A.; Milne, W. Smart microgrippers for bioMEMS applications. In MEMS for Biomedical Applications; Woodhead Publishing: Sawston, UK, 2012; pp. 291–336. [Google Scholar] [CrossRef]
- Meinhold, W.; Martinez, D.E.; Oshinski, J.N.; Hu, A.P.; Ueda, J. A direct drive parallel plane piezoelectric needle positioning robot for MRI guided intraspinal injection. IEEE Trans. Biomed. Eng. 2020. [Google Scholar] [CrossRef]
- Bani-Hani, M.; Amin Karami, M. Piezoelectric Tooth Aligner for Accelerated Orthodontic Tooth Movement. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 4265–4268. [Google Scholar] [CrossRef]
- Liu, C.; Guo, Y. Modeling and Positioning of a PZT Precision Drive System. Sensors 2017, 17, 2577. [Google Scholar] [CrossRef] [Green Version]
- Adriaens, H.; Koning, W.; Banning, R. Modeling piezoelectric actuators. Mechatronics IEEE/ASME Trans. 2001, 5, 331–341. [Google Scholar] [CrossRef] [Green Version]
- Stefanski, F.; Minorowicz, B. Open loop control of piezoelectric tube transducer. Arch. Mech. Technol. Mater. 2018, 38, 23–28. [Google Scholar] [CrossRef] [Green Version]
- Zhiliang, Y.; Yue, W.; Fang, Z.; Sun, H. Modeling and compensation of hysteresis in piezoelectric actuators. Heliyon 2020, 6. [Google Scholar] [CrossRef]
- Nafea, M.; Mohamed, Z.; Abdullahi, A.; Ahmad, M.; Husain, A. Dynamic Hysteresis Based Modeling Of Piezoelectric Actuators. J. Teknol. 2014, 67, 9–13. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Xu, Y.; Shao, M.; Guo, L.; An, D. Analysis for hysteresis of piezoelectric actuator based on microscopic mechanism. IOP Conf. Ser. Mater. Sci. Eng. 2018, 399. [Google Scholar] [CrossRef]
- Helke, G.; Lubitz, K. Piezoelectric PZT Ceramics. In Piezoelectricity: Evolution and Future of a Technology; Springer: Berlin/Heidelberg, Germany, 2008; pp. 89–130. [Google Scholar] [CrossRef]
- An, D.; Li, H.; Xu, Y.; Zhang, L. Compensation of Hysteresis on Piezoelectric Actuators Based on Tripartite PI Model. Micromachines 2018, 9, 44. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Damjanovic, D. Hysteresis in piezoelectric and ferroelectric materials. In The Science of Hysteresis; Chapter 4; Academic Press: San Diego, CA, USA, 2006; pp. 338–452. [Google Scholar] [CrossRef] [Green Version]
- Newcomb, C.V.; Flinn, I. Improving the linearity of piezoelectric ceramic actuators. Electron. Lett. 1982, 18, 442–444. [Google Scholar] [CrossRef]
- Cuttino, J.F.; Miller, A.C.; Schinstock, D.E. Performance optimization of a fast tool servo for single-point diamond turning machines. IEEE/ASME Trans. Mechatronics 1999, 4, 169–179. [Google Scholar] [CrossRef]
- Ronkanen, P.; Kallio, P.; Vilkko, M.; Koivo, H.N. Displacement Control of Piezoelectric Actuators Using Current and Voltage. IEEE/ASME Trans. Mechatronics 2011, 16, 160–166. [Google Scholar] [CrossRef]
- Lin, C.; Yang, S. Precise positioning of piezo-actuated stages using hysteresis-observer based control. Mechatronics 2006, 16, 417–426. [Google Scholar] [CrossRef] [Green Version]
- Choi, G.; Lim, Y.; Choi, G. Tracking position control of piezoelectric actuators for periodic reference inputs. Mechatronics 2002, 12, 669–684. [Google Scholar] [CrossRef]
- Lin, J.; Chiang, H.; Lin, C. Tuning PID control parameters for micro-piezo-stage by using grey relational analysis. Expert Syst. Appl. 2011, 38, 13924–13932. [Google Scholar] [CrossRef]
- Abramovitch, D.; Hoen, S.; Workman, R. Semi-automatic tuning of PID gains for Atomic Force Microscopes. Asian J. Control 2008, 11, 188–195. [Google Scholar] [CrossRef]
- Rebai, R.; Guesmi, K.; Boualem, H. Design of an optimized fractional order fuzzy PID controller for a piezoelectric actuator. Control. Eng. Appl. Informatics 2015, 17, 41–49. [Google Scholar] [CrossRef]
- Applebaum, E.; Ben-Asher, J. Fuzzy gain scheduling using output feedback for flutter suppression in unmanned aerial vehicles with Piezoelectric materials. In Proceedings of the IEEE Annual Meeting of the Fuzzy Information, NAFIPS ’04, Banff, AL, Canada, 27–30 June 2004; Volume 1, pp. 242–247. [Google Scholar] [CrossRef]
- Ezzraimi, M.; Tiberkak, R.; Melbous, A.; Rechak, S. LQR and PID Algorithms for Vibration Control of Piezoelectric Composite Plates. Mechanics 2018, 24. [Google Scholar] [CrossRef] [Green Version]
- Chi, Z. Recent Advances in the Control of Piezoelectric Actuators. Int. J. Adv. Robot. Syst. 2014, 11. [Google Scholar] [CrossRef] [Green Version]
- Oates, W.; Smith, R. Nonlinear optimal tracking control of a piezoelectric nanopositioning stage. Proc. SPIE Int. Soc. Opt. Eng. 2006, 6166. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Huang, M.; Tsai, Y. Nonlinear control design of piezoelectric actuators with micro positioning capability. Microsyst. Technol. 2019. [Google Scholar] [CrossRef]
- Song, J.; Kiureghian, A. Generalized Bouc–Wen Model for Highly Asymmetric Hysteresis. J. Eng. Mech. ASCE 2006, 132. [Google Scholar] [CrossRef] [Green Version]
- Minh, T.; Nguyen, L.; Chen, X. Tracking control of piezoelectric actuator using adaptive model. Robot. Biomimetics 2016, 3. [Google Scholar] [CrossRef] [Green Version]
- Dong, R.; Tan, Y. Nonlinear Robust Control of Positioning Stage Using Piezoelectric Actuator. In Proceedings of the 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Tianjin, China, 19–23 July 2018; pp. 204–207. [Google Scholar] [CrossRef]
- Draženović, B.; Milosavljevi, C.; Veselić, B. Comprehensive Approach to Sliding Mode Design and Analysis in Linear Systems. In Advances in Sliding Mode Control: Concept, Theory and Implementation; Springer: Berlin/Heidelberg, Germany, 2013; pp. 1–19. [Google Scholar] [CrossRef]
- Derbeli, M.; Sbita, L.; Farhat, M.; Barambones, O. PEM fuel cell green energy generation—SMC efficiency optimization. In Proceedings of the 2017 International Conference on Green Energy Conversion Systems (GECS), Hammamet, Tunisia, 23–25 March 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Velasco, J.; Barambones, O.; Calvo, I.; Zubia, J.; Saez de Ocariz, I.; Chouza, A. Sliding Mode Control with Dynamical Correction for Time-Delay Piezoelectric Actuator Systems. Materials 2019, 13, 132. [Google Scholar] [CrossRef] [Green Version]
- Huang, P.; Shieh, P.; Lin, F.; Shieh, H. Sliding-mode control for a two-dimensional piezo-positioning stage. IET Control. Theory Appl. 2007, 1, 1104–1113. [Google Scholar] [CrossRef]
- Shen, J.; Jywe, W.; Liu, C.; Jian, Y.; Yang, J. Sliding-mode control of a three-degrees-of-freedom nanopositioner. Asian J. Control 2008, 10, 267–276. [Google Scholar] [CrossRef]
- Velasco, J.; Calvo, I.; Barambones, O.; Venegas, P.; Napole, C. Experimental Validation of a Sliding Mode Control for a Stewart Platform Used in Aerospace Inspection Applications. Mathematics 2020, 8, 2051. [Google Scholar] [CrossRef]
- Chouza, A.; Barambones, O.; Calvo, I.; Velasco, J. Sliding Mode-Based Robust Control for Piezoelectric Actuators with Inverse Dynamics Estimation. Energies 2019, 12, 943. [Google Scholar] [CrossRef] [Green Version]
- Thanh, H.; Vu, M.; Mung, X.; Nguyen, N.P.; Phuong, N. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Lin, H.; Leon, J.; Luo, W.; Marquez, A.; Liu, J.; Vazquez, S.; Franquelo, L. Integral Sliding-Mode Control-Based Direct Power Control for Three-Level NPC Converters. Energies 2020, 13, 227. [Google Scholar] [CrossRef] [Green Version]
- Zaihidee, M.; Mekhilef, S.; Mubin, M. Robust Speed Control of PMSM Using Sliding Mode Control (SMC)—A Review. Energies 2019, 12, 1669. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Kuo, C. Design and implementation of double-integral sliding-mode controller for brushless direct current motor speed control. Adv. Mech. Eng. 2017, 9, 1687814017737724. [Google Scholar] [CrossRef] [Green Version]
- Fridman, L.; Levant, A. Higher-Order Sliding Modes. In Sliding Mode Control in Engineering; Taylor and Francis Group: New York, NY, USA, 2002; Volume 11, pp. 53–101. [Google Scholar] [CrossRef]
- Silaa, M.; Derbeli, M.; Barambones, O.; Cheknane, A. Design and Implementation of High Order Sliding Mode Control for PEMFC Power System. Energies 2020, 13, 4317. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Silaa, M.; Napole, C. Real-Time Implementation of a New MPPT Control Method for a DC-DC Boost Converter Used in a PEM Fuel Cell Power System. Actuators 2020, 9, 105. [Google Scholar] [CrossRef]
- Shahid, Y.; Wei, M. Comparative Analysis of Different Model-Based Controllers Using Active Vehicle Suspension System. Algorithms 2019, 13, 10. [Google Scholar] [CrossRef] [Green Version]
- Huo, R.; Liu, X.; Zeng, X.; Lei, Z. Integrated guidance and control based on high-order sliding mode method. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 6073–6078. [Google Scholar] [CrossRef]
- Liu, X.; Wang, W. High order sliding mode and its application on the tracking control of piezoelectric systems. Int. J. Innov. Comput. Inf. Control 2008, 4, 697–704. [Google Scholar]
- Wang, Y.; Su, H.; Harrington, K.; Fischer, G. Sliding Mode Control of Piezoelectric Valve Regulated Pneumatic Actuator for MRI-Compatible Robotic Intervention. In Proceedings of the ASME 2010 Dynamic Systems and Control Conference, DSCC2010, Cambridge, MA, USA, 12–15 September 2010; Volume 2. [Google Scholar] [CrossRef]
- Abidi, K.; Sabanovic, A.; Yannier, S. Experimental investigation of a SMC high precision control. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 721–726. [Google Scholar] [CrossRef] [Green Version]
- Derbeli, M.; Barambones, O.; Farhat, M.; Ramos-Hernanz, J.A.; Sbita, L. Robust high order sliding mode control for performance improvement of PEM fuel cell power systems. Int. J. Hydrogen Energy 2020, 45, 29222–29234. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, Y. Quantization Behaviors in Equivalent-Control Based Sliding-Mode Control Systems. In Advances in Sliding Mode Control: Concept, Theory and Implementation; Springer: Berlin/Heidelberg, Germany, 2013; pp. 221–241. [Google Scholar] [CrossRef]
- Napole, C.; Barambones, O.; Calvo, I.; Derbeli, M.; Silaa, M.; Velasco, J. Advances in Tracking Control for Piezoelectric Actuators Using Fuzzy Logic and Hammerstein-Wiener Compensation. Mathematics 2020, 8, 2071. [Google Scholar] [CrossRef]
- Armin, M.; Roy, P.N.; Das, S.K. A Survey on Modelling and Compensation for Hysteresis in High Speed Nanopositioning of AFMs: Observation and Future Recommendation. Int. J. Autom. Comput. 2020, 17, 479. [Google Scholar] [CrossRef]
- Xiong, R.; Liu, X.; Lai, Z. Modeling of Hysteresis in Piezoelectric Actuator Based on Segment Similarity. Micromachines 2015, 6, 1805–1824. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Hu, Y.; Zhao, Y.; X, L. Modeling and Control of IPMC Actuators Based on LSSVM-NARX Paradigm. Mathematics 2019, 7, 741. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Tian, D.; Wang, Z. Adaptive Tracking Control for the Piezoelectric Actuated Stage Using the Krasnosel’skii-Pokrovskii Operator. Micromachines 2020, 11, 537. [Google Scholar] [CrossRef] [PubMed]
- Carneiro, F.; Abreu, P.; Restivo, M. Hysteresis Compensation in a Tactile Device for Arterial Pulse Reproduction. Sensors 2018, 18, 1631. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Chiang, M. Tracking Control of a Magnetic Shape Memory Actuator Using an Inverse Preisach Model with Modified Fuzzy Sliding Mode Control. Sensors 2016, 16, 1368. [Google Scholar] [CrossRef] [Green Version]
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. A class of uniaxial phenomenological models for simulating hysteretic phenomena in rate-independent mechanical systems and materials. Nonlinear Dyn. 2018, 93. [Google Scholar] [CrossRef]
- Vaiana, N.; Sessa, S.; Rosati, L. A generalized class of uniaxial rate-independent models for simulating asymmetric mechanical hysteresis phenomena. Mech. Syst. Signal Process. 2021, 146, 106984. [Google Scholar] [CrossRef]
- Napole, C.; Barambones, O.; Calvo, I.; Velasco, J. Feedforward Compensation Analysis of Piezoelectric Actuators Using Artificial Neural Networks with Conventional PID Controller and Single-Neuron PID Based on Hebb Learning Rules. Energies 2020, 13, 3929. [Google Scholar] [CrossRef]
- Napole, C.; Barambones, O.; Derbeli, M.; Silaa, M.; Calvo, I.; Velasco, J. Tracking Control for Piezoelectric Actuators with Advanced Feed-forward Compensation Combined with PI Control. In Proceedings of the 1st International Electronic Conference on Actuator Technology, Online, 23–27 November 2020. [Google Scholar] [CrossRef]
- Valenzuela, F.; Reymundo, R.; Martínez, F.; Onofre, A.; Castañeda, C.E. Super-Twisting Algorithm Applied to Velocity Control of DC Motor without Mechanical Sensors Dependence. Energies 2020, 13, 6041. [Google Scholar] [CrossRef]
- Khan, R.; Khan, L.; Ullah, S.; Sami, I.; Ro, J. Backstepping Based Super-Twisting Sliding Mode MPPT Control with Differential Flatness Oriented Observer Design for Photovoltaic System. Electronics 2020, 9, 1543. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.; Lv, X. Model-Free Hybrid Control with Intelligent Proportional Integral and Super-Twisting Sliding Mode Control of PMSM Drives. Electronics 2020, 9, 1427. [Google Scholar] [CrossRef]
- Gan, J.; Zhang, X.; Wu, H. A generalized Prandtl-Ishlinskii model for characterizing the rate-independent and rate-dependent hysteresis of piezoelectric actuators. Rev. Sci. Instrum. 2016, 87, 035002. [Google Scholar] [CrossRef]
- Li, W.; Nie, L.; Liu, Y.; Zhou, M. Rate Dependent Krasnoselskii-Pokrovskii Modeling and Inverse Compensation Control of Piezoceramic Actuated Stages. Sensors 2020, 20, 5062. [Google Scholar] [CrossRef]
- Qin, Y.; Duan, H. Single-Neuron Adaptive Hysteresis Compensation of Piezoelectric Actuator Based on Hebb Learning Rules. Micromachines 2020, 11, 84. [Google Scholar] [CrossRef] [Green Version]
- Soleimani Amiri, M.; Ramli, R.; Ibrahim, M.; Wahab, D.; Aliman, N. Adaptive Particle Swarm Optimization of PID Gain Tuning for Lower-Limb Human Exoskeleton in Virtual Environment. Mathematics 2020, 8, 2040. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, X.; Liu, Y.; Wang, G.; Hong, K. Design and Control of a Piezoelectric-Driven Microgripper Perceiving Displacement and Gripping Force. Micromachines 2020, 11, 121. [Google Scholar] [CrossRef] [Green Version]
- Cappa, P.; Rita, G.; McConnell, K.G.; Zachary, L. Using Strain Gages to Measure Both Strain and Temperature. Exp. Mech. 1992, 32, 230–233. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Z.; Liu, Z. Application of Artificial Neural Networks for Catalysis: A Review. Catalysts 2017, 7, 306. [Google Scholar] [CrossRef]
- Allam, Z. Achieving Neuroplasticity in Artificial Neural Networks through Smart Cities. Smart Cities 2019, 2, 118–134. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, V.S. Investigation of a Multitasking System for Automatic Ship Berthing in Marine Practice Based on an Integrated Neural Controller. Mathematics 2020, 8, 1167. [Google Scholar] [CrossRef]
- Matrenin, P.; Manusov, V.; Khalyasmaa, A.; Antonenkov, D.; Eroshenko, S.; Butusov, D. Improving Accuracy and Generalization Performance of Small-Size Recurrent Neural Networks Applied to Short-Term Load Forecasting. Mathematics 2020, 8, 2169. [Google Scholar] [CrossRef]
- Alyukov, A.; Rozhdestvenskiy, Y.; Alyukov, S. Active Shock Absorber Control Based on Time-Delay Neural Network. Energies 2020, 13, 1091. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zhu, L.; Feng, F.; Zhang, W.; Zhang, Q.; Lin, Q.; Liu, G. A Time Delay Neural Network Based Technique for Nonlinear Microwave Device Modeling. Micromachines 2020, 11, 831. [Google Scholar] [CrossRef]
- Ahn, H.; Park, N. Deep RNN-Based Photovoltaic Power Short-Term Forecast Using Power IoT Sensors. Energies 2021, 14, 436. [Google Scholar] [CrossRef]
- Grech, C.; Buzio, M.; Pentella, M.; Sammut, N. Dynamic Ferromagnetic Hysteresis Modelling Using a Preisach-Recurrent Neural Network Model. Materials 2020, 13, 2561. [Google Scholar] [CrossRef]
- Beale, M.; Hagan, M.; Demuth, H. Deploy Training of Shallow Neural Networks. In Deep Learning Toolbox; The Mathworks Inc.: Natick, MA, USA, 2020; pp. 21–22. [Google Scholar]
- Doubravová, J.; Wiszniowski, J.; Horalek, J. Single Layer Recurrent Neural Network for detection of swarm-like earthquakes in W-Bohemia/Vogtland—The method. Comput. Geosci. 2016, 93. [Google Scholar] [CrossRef]
- Negash, B.; Yaw, A. Artificial neural network based production forecasting for a hydrocarbon reservoir under water injection. Pet. Explor. Dev. 2020, 47, 383–392. [Google Scholar] [CrossRef]
- Okut, H. Bayesian Regularized Neural Networks for Small n Big p Data. In Artificial Neural Networks-Models and Applications; Chapter 2; Intech: London, UK, 2016; pp. 28–48. [Google Scholar] [CrossRef] [Green Version]
- Morfin, O.; Castaneda, C.; Valderrabano-Gonzalez, A.; Hernandez-Gonzalez, M.; Valenzuela, F. A Real-Time SOSM Super-Twisting Technique for a Compound DC Motor Velocity Controller. Energies 2017, 10, 1286. [Google Scholar] [CrossRef] [Green Version]
- Moreno, J. Lyapunov Approach for Analysis and Design of Second Order Sliding Mode Algorithms. In Sliding Modes after the First Decade of the 21st Century; Springer: Berlin/Heidelberg, Germany, 2011; Volume 412, pp. 113–149. [Google Scholar] [CrossRef]
- Alhato, M.; Bouallègue, S.; Rezk, H. Modeling and Performance Improvement of Direct Power Control of Doubly-Fed Induction Generator Based Wind Turbine through Second-Order Sliding Mode Control Approach. Mathematics 2020, 8, 2012. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. Strict Lyapunov Functions for the Super-Twisting Algorithm. IEEE Trans. Autom. Control 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Stamov, G.; Stamova, I.; Venkov, G.; Stamov, T.; Spirova, C. Global Stability of Integral Manifolds for Reaction–Diffusion Delayed Neural Networks of Cohen–Grossberg-Type under Variable Impulsive Perturbations. Mathematics 2020, 8, 1082. [Google Scholar] [CrossRef]
- Popa, C.; Kaslik, E. Finite-Time Mittag–Leffler Synchronization of Neutral-Type Fractional-Order Neural Networks with Leakage Delay and Time-Varying Delays. Mathematics 2020, 8, 1146. [Google Scholar] [CrossRef]
- Ramm, A. Stability of Solutions to Some Evolution Problems. Mathematics 2010, 1, 46. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Values | Units | |
|---|---|---|
| Nominal Displacement | 38.5 | μm |
| Actuator Dimensions | 7.3 × 7.3 × 36 | mm |
| Force at maximum displacement | 400 | N |
| Blocking force | 1000 | N |
| Resonant frequency | 34 | kHz |
| Values | Units | |
|---|---|---|
| Mass (m) | 0.431 | Kg |
| Damping (b) | 1340 | N·s/m |
| Stiffness (k) | 81263 | N/m |
| Values | |
|---|---|
| Data points | 40.000 |
| Training/ Validation/ Test Sets | 70/15/15 |
| Iterations | 5300 |
| Performance Metric | MSE |
| Training Algorithm | Bayesian regularization |
| Training time [hs] | 6 |
| Reference | IAE | RMSE [μm] | RRMSE [%] | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ST | PID | Difference | ST-ANN | PID | Difference | ST | PID | Difference | |
| Triangle | 0.0653 | 0.28 | 4.2× | 0.0203 | 0.0756 | 3.7× | 0.45 | 1.69 | 3.75× |
| Sine wave | 0.0625 | 0.28 | 4.4× | 0.0195 | 0.0795 | 4× | 0.44 | 1.80 | 4.09× |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Napole, C.; Barambones, O.; Derbeli, M.; Calvo, I.; Silaa, M.Y.; Velasco, J. High-Performance Tracking for Piezoelectric Actuators Using Super-Twisting Algorithm Based on Artificial Neural Networks. Mathematics 2021, 9, 244. https://doi.org/10.3390/math9030244
Napole C, Barambones O, Derbeli M, Calvo I, Silaa MY, Velasco J. High-Performance Tracking for Piezoelectric Actuators Using Super-Twisting Algorithm Based on Artificial Neural Networks. Mathematics. 2021; 9(3):244. https://doi.org/10.3390/math9030244
Chicago/Turabian StyleNapole, Cristian, Oscar Barambones, Mohamed Derbeli, Isidro Calvo, Mohammed Yousri Silaa, and Javier Velasco. 2021. "High-Performance Tracking for Piezoelectric Actuators Using Super-Twisting Algorithm Based on Artificial Neural Networks" Mathematics 9, no. 3: 244. https://doi.org/10.3390/math9030244