
A Study of ψ-Hilfer Fractional Boundary Value Problem via Nonlinear Integral Conditions Describing Navier Model

 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Existence Results
3.1. Uniqueness Property via Banach’s Fixed Point Theorem
- There exist constants , , with such that
- There exist constants , such that
3.2. Existence Property via Leray-Schauder’s Type
- There exist nondecreasing continuous functions , , , , ,
- There exists a constant satisfy
3.3. Existence Property via Krasnoselskii’s Fixed Point Theorem
- ()
- There exist , , , , , , such that ,
4. Ulam’s Stability
- Definition 4⇒ Definition 5;
- Definition 6⇒ Definition 7;
- Definition 6 for ⇒ Definition 4.
- , ;
- , .
- , ;
- , .
- ()
- There is an increasing function and there is a constant , such that, for any , we obtain
4.1. Stability and Stability
4.2. Stability and Stability
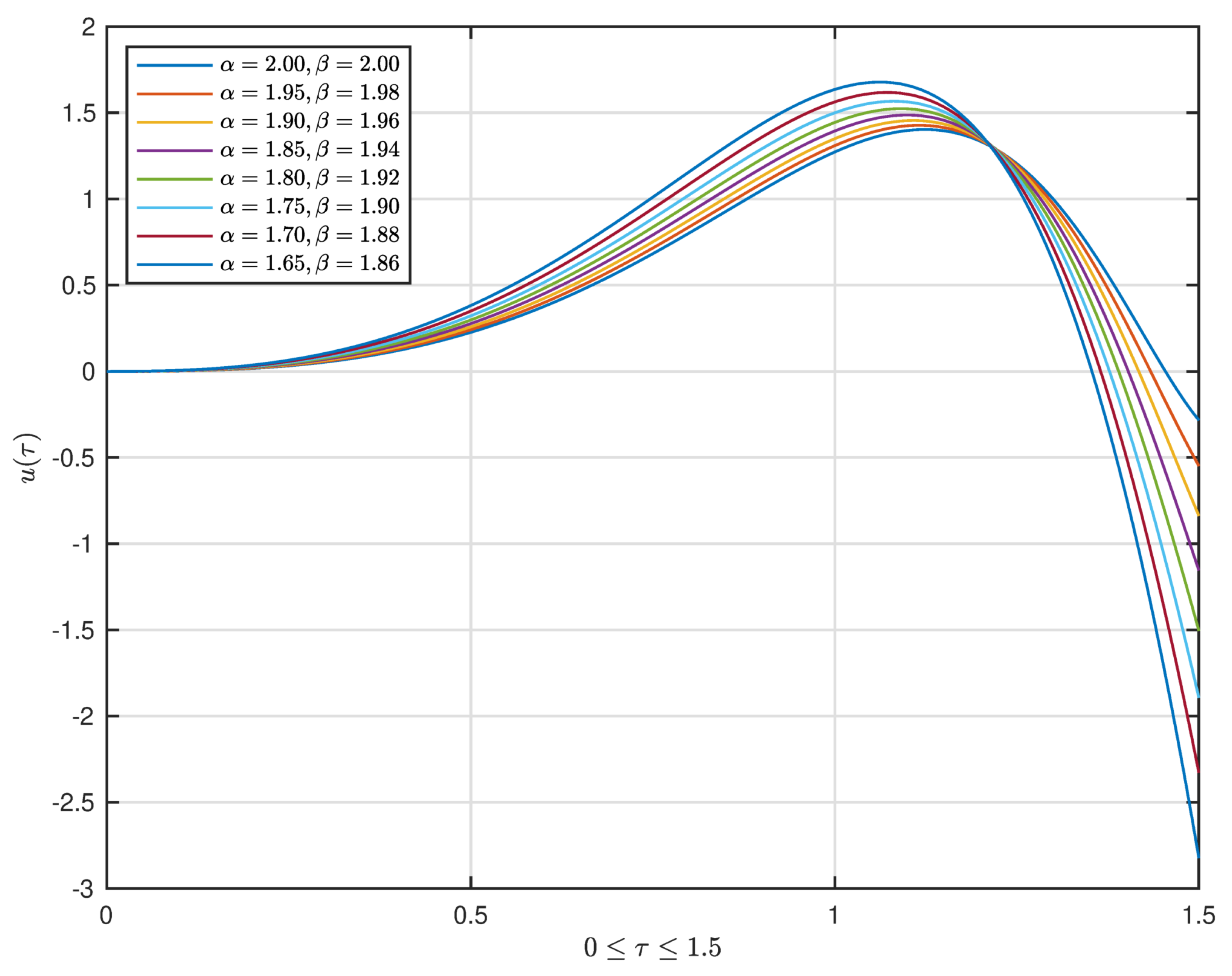
5. Examples
- (i)
- Given the function
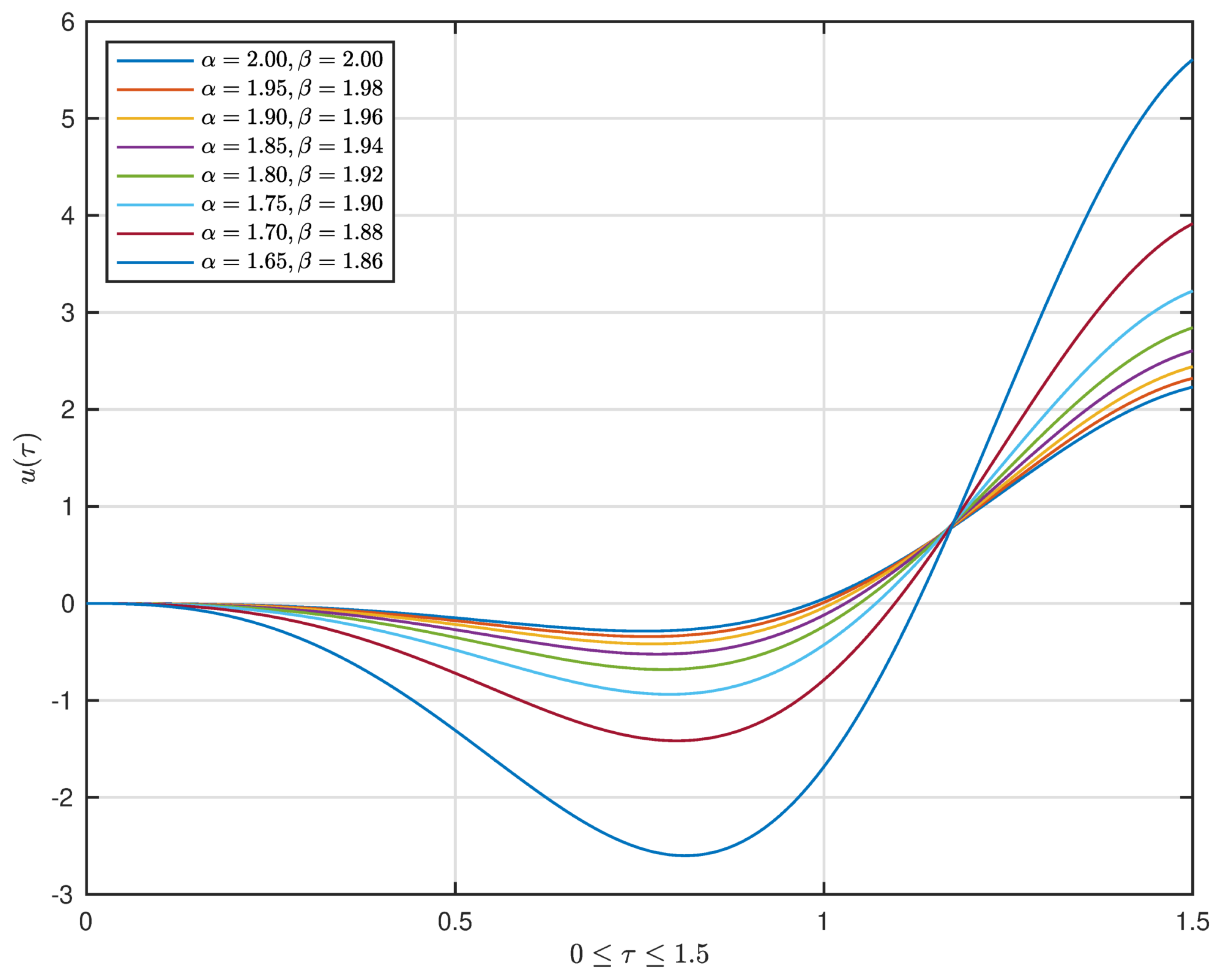
- (ii)
- Given the function
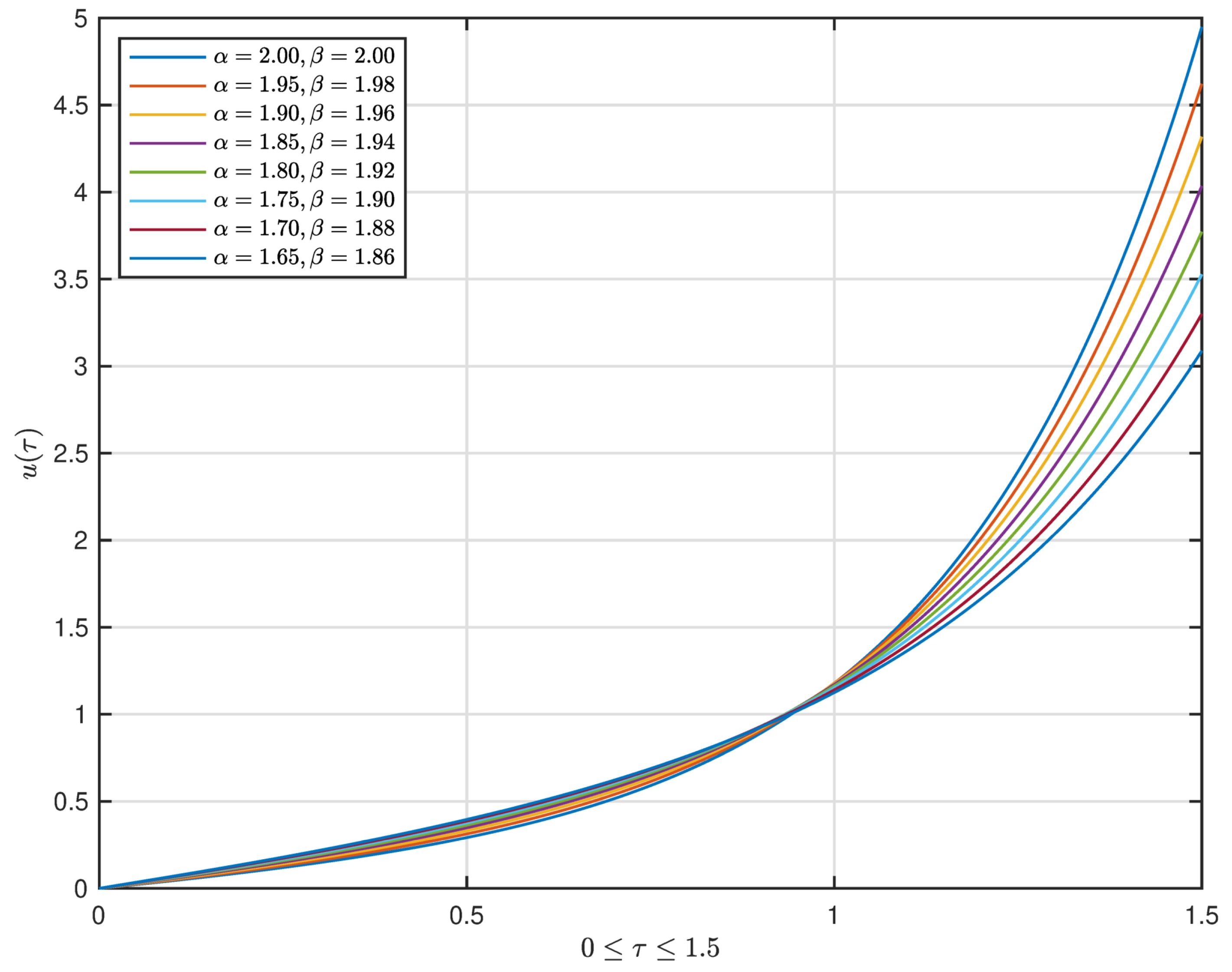
- (iii)
- Given the function
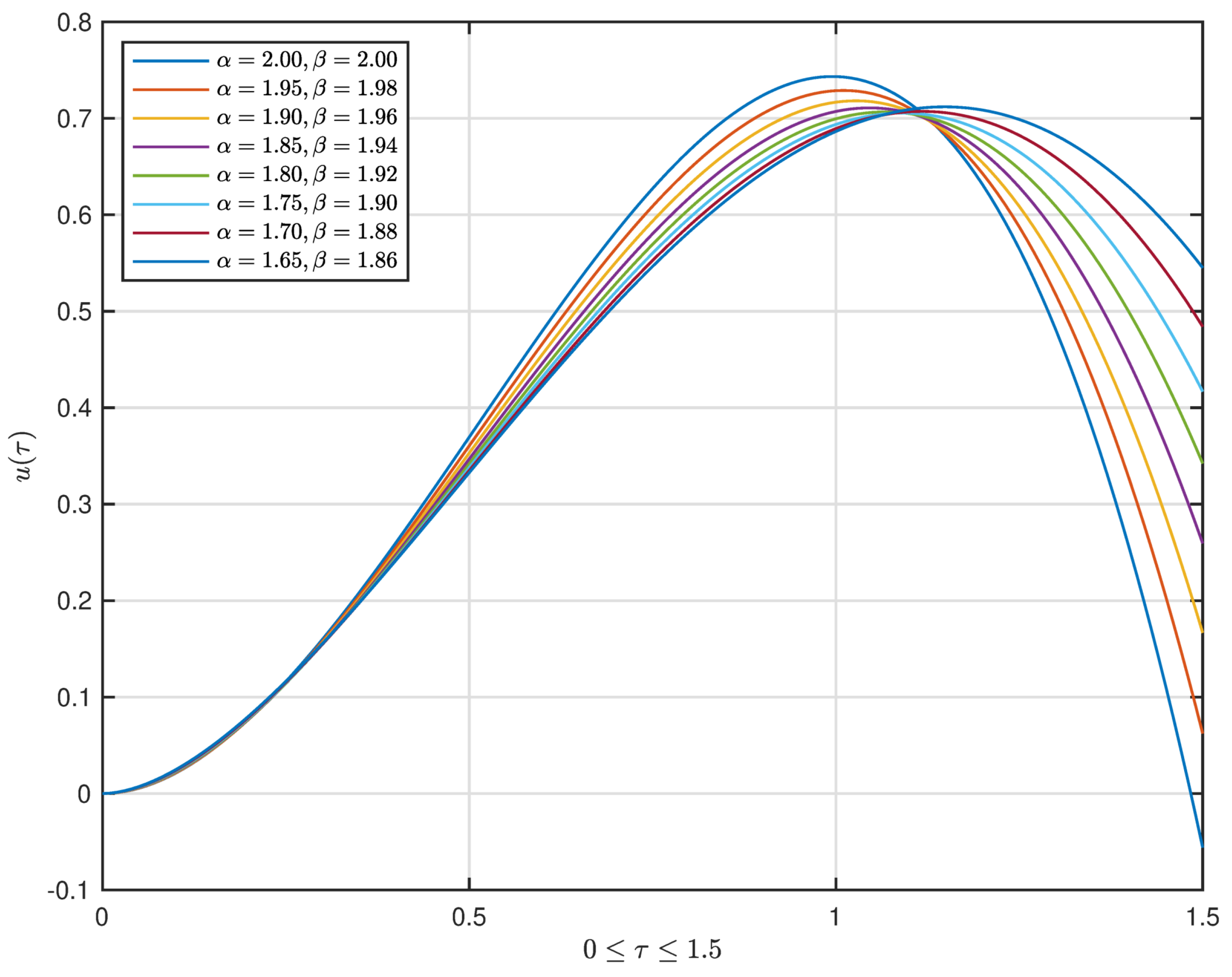
- (iv)
- Consider and
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Nandal, S.; Zaky, M.A.; De Staelen, R.H.; Hendy, A.S. Numerical simulation for a multidimensional fourth-order nonlinear fractional subdiffusion model with time delay. Mathematics 2021, 9, 3050. [Google Scholar] [CrossRef]
- Shokri, A. An explicit trigonometrically fitted ten-step method with phase-lag of order infinity for the numerical solution of the radial Schrödinger equation. Appl. Comput. Math. 2015, 14, 63–74. [Google Scholar]
- Baleanu, D.; Mousalou, A.; Rezapour, S. On the existence of solutions for some infinite coefficient-symmetric Caputo-Fabrizio fractional integro-differential equations. Bound. Value Probl. 2017, 207, 145. [Google Scholar] [CrossRef]
- Hao, X.; Sun, H.; Liu, L. Existence results for fractional integral boundary value problem involving fractional derivatives on an infinite interval. Math. Methods Appl. Sci. 2018, 41, 6984–6996. [Google Scholar] [CrossRef]
- Harikrishman, S.; Elsayed, E.; Kanagarajan, K. Existence and uniqueness results for fractional pantograph equations involving ψ-Hilfer fractional derivative. Dyn. Contin. Discrete Impuls. Syst. Ser. A Math. Anal. 2018, 25, 319–328. [Google Scholar]
- Boutiara, A.; Guerbati, K.; Benbachir, M. Caputo-Hadamard fractional differential equation with three-point boundary conditions in Banach spaces. AIMS Math. 2020, 5, 259–272. [Google Scholar]
- Ahmed, I.; Kuman, P.; Shah, K.; Borisut, P.; Sitthithakerngkiet, K.; Demba, M.A. Stability results for implicit fractional pantograph differential equations via ψ-Hilfer fractional derivative with a nonlocal Riemann-Liouville fractional integral condition. Mathematics 2020, 8, 94. [Google Scholar] [CrossRef] [Green Version]
- Etemad, S.; Ntouyas, S.K.; Imran, A.; Hussain, A.; Baleanu, D.; Rezapour, S. Application of some special operators on theanalysis of a new generalized fractional Navier problem in the context of q-calculus. Adv. Differ. Equ. 2021, 2021, 402. [Google Scholar] [CrossRef]
- Rezapour, S.; Tellab, B.; Deressa, C.T.; Etemad, S.; Nonlaopon, K. H-U-Type Stability and numerical solutions for a nonlinear model of the coupled systems of Navier BVPs via the generalized differential transform method. Fractal Fract. 2021, 5, 166. [Google Scholar] [CrossRef]
- Karthikeyan, K.; Karthikeyan, P.; Patanarapeelert, N.; Sitthiwirattham, T. Mild Solutions for Impulsive Integro-Differential Equations Involving Hilfer Fractional Derivative with almost Sectorial Operators. Axioms 2021, 10, 313. [Google Scholar] [CrossRef]
- Ahmad, B.; Ntouyas, S.K. Hilfer-Hadamard fractional boundary value problems with nonlocal mixed boundary conditions. Fractal Fract. 2021, 5, 195. [Google Scholar] [CrossRef]
- Shokri, A. The symmetric two-step P-stable nonlinear predictor-corrector methods for the numerical solution of second order initial value problems. Bull. Iran. Math. Soc. 2015, 41, 201–215. [Google Scholar]
- Saeed, A.M.; Abdo, M.S.; Jeelani, M.B. Existence and Ulam-Hyers stability of a fractional-order coupled system in the frame of generalized Hilfer derivatives. Mathematics 2021, 9, 2543. [Google Scholar] [CrossRef]
- Karthikeyan, K.; Karthikeyan, P.; Chalishajar, D.N.; Raja, D.S.; Sundararajan, P. Analysis on ψ-Hilfer fractional impulsive differential equations. Symmetry 2021, 13, 1895. [Google Scholar] [CrossRef]
- Boutiara, A.; Abdo, M.S.; Almalahi, M.A.; Ahmad, H.; Ishan, A. Implicit hybrid fractional boundary value problem via generalized Hilfer derivative. Symmetry 2021, 13, 1937. [Google Scholar] [CrossRef]
- Kotsamran, K.; Sudsutad, W.; Thaiprayoon, C.; Kongson, J.; Alzabut, J. Analysis of a nonlinear ψ-Hilfer fractional integro-differential equation describing cantilever beam model with nonlinear boundary conditions. Fractal Fract. 2021, 5, 177. [Google Scholar] [CrossRef]
- Gupta, C.P. Existence and uniqueness theorems for the bending of an elastic beam equation. Appl. Anal. 1988, 26, 289–304. [Google Scholar] [CrossRef]
- Zhong, Y.; Chen, S.; Wang, C. Existence results for a fourth-order ordinary differential equation with a four-point boundary condition. Appl. Math. Lett. 2008, 21, 465–470. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.P.; Wang, X.Y. Positive solution for fourth-order four-point Sturm-Liouville boundary value problem. J. Appl. Math. Inform. 2010, 28, 679–686. [Google Scholar]
- Bonanno, G.; Chinni, A.; Tersian, S.A. Existence results for a two point boundary value problem involving a fourth-order equation. Electron. J. Qual. Theory Differ. Equ. 2015, 33, 1–9. [Google Scholar] [CrossRef]
- Bouteraa, N.; Benaicha, S.; Djourdem, H.; Benattia, M.E. Positive solutions of nonlinear fourth-order two-point boundary value problem with a parameter. Rom. J. Math. Comput. Sci. 2018, 8, 17–30. [Google Scholar]
- Tuz, M. The Existence of symmetric positive solutions of fourth-order elastic beam equations. Symmetry 2019, 11, 121. [Google Scholar] [CrossRef] [Green Version]
- Alzabut, J.; Selvam, A.G.M.; Dhineshbabu, R.; Kaabar, M.K.A. The existence, uniqueness, and stability analysis of the discrete fractional three-point boundary value problem for the elastic beam equation. Symmetry 2021, 13, 789. [Google Scholar] [CrossRef]
- Faraji Oskouie, M.; Ansari, R.; Rouhi, H. Bending analysis of functionally graded nanobeams based on the fractional nonlocal continuum theory by the variational Legendre spectral collocation method. Meccanica 2018, 53, 1115–1130. [Google Scholar] [CrossRef]
- Sidhardh, S.; Patnaik, S.; Semperlotti, F. Fractional-order structural stability: Formulation and application to the critical load of nonlocal slender structures. Int. J. Mech. Sci. 2021, 201, 106443. [Google Scholar] [CrossRef]
- Lazopoulos, K.A.; Lazopoulos, A.K. On the fractional deformation of a linearly elastic bar. J. Mech. Behav. Mater. 2020, 29, 9–18. [Google Scholar] [CrossRef]
- Lazopoulos, K.A.; Lazopoulos, A.K. On fractional bending of beams. Arch. Appl. Mech. 2016, 86, 1133–1145. [Google Scholar] [CrossRef]
- Alotta, G.; Failla, G.; Zingales, M. Finite element formulation of a nonlocal hereditary fractional-order timoshenko beam. J. Eng. Mech. 2015, 143, D4015001. [Google Scholar] [CrossRef]
- Tarasov, V.E. Fractional mechanics of elastic solids: Continuum aspects. J. Eng. Mech. 2016, 143, D4016001. [Google Scholar] [CrossRef]
- Failla, G. Stationary response of beams and frames with fractional dampers through exact frequency response functions. J. Eng. Mech.-A Solids 2016, 143, D4016004. [Google Scholar] [CrossRef]
- Sumelka, W.; Blaszczyk, T.; Liebold, C. Fractional Euler-Bernoulli beams: Theory, numerical study and experimental validation. Eur. J. Mech. 2015, 54, 243–251. [Google Scholar] [CrossRef] [Green Version]
- Sidhardh, S.; Patnaik, S.; Semperlotti, F. Geometrically nonlinear response of a fractional-order nonlocal model of elasticity. Int. J.-Non Mech. 2020, 125, 103529. [Google Scholar] [CrossRef]
- Stempin, P.; Sumelka, W. Space-Fractional Euler-Bernoulli beam model theory and identification for silver nanobeam bending. Int. J. Mech. Sci. 2020, 186, 105902. [Google Scholar] [CrossRef]
- Reiss, E.L.; Callegari, A.J.; Ahluwalia, D.S. Ordinary Differential Equations with Applications; Holt, Rinehart & Winston: New York, NY, USA, 1978. [Google Scholar]
- Aftabizadeh, A.R. Existence and uniqueness theorems for fourth-order boundary value problems. J. Math. Anal. Appl. 1986, 116, 415–426. [Google Scholar] [CrossRef] [Green Version]
- Ma, R.; Zhang, J.; Fu, S. The method of lower and upper solutions for fourth-order two-point boundary value problems. J. Math. Anal. Appl. 1997, 215, 415–422. [Google Scholar]
- Bai, Z.; Ge, W.; Wang, Y. The method of lower and upper solutions for some fourth-order equations. J. Inequal. Pure Appl. Math. 2004, 5, 13. [Google Scholar]
- Dang, Q.A.; Long, D.Q.; Ngo, T.K.Q. A novel efficient method for nonlinear boundary value problems. Numer. Algorithms 2017, 76, 427–439. [Google Scholar] [CrossRef]
- Bachar, I.; Eltayeb, H. Existence and uniqueness results for fractional Navier boundary value problems. Adv. Differ. Equ. 2020, 2020, 609. [Google Scholar] [CrossRef]
- Abdeljawad, T.; Karapınar, E.; Panda, S.K.; Mlaiki, N. Solutions of boundary value problems on extended-Branciari b-distance. J. Inequa. Appl. 2020, 2020, 103. [Google Scholar] [CrossRef]
- Chandran, K.; Gopalan, K.; Zubair, S.T.; Abdeljawad, T. A fixed point approach to the solution of singular fractional differential equations with integral boundary conditions. Adv. Differ. Equ. 2021, 2021, 56. [Google Scholar] [CrossRef]
- Etemad, S.; Rezapour, S. On the existence of solutions for fractional boundary value problems on the ethane graph. Adv. Differ. Equ. 2020, 2020, 276. [Google Scholar] [CrossRef]
- Tarasov, V.E. Fractional integro-differential equations for electromagnetic waves in dielectric media. Theor. Math. Phys. 2009, 158, 355–359. [Google Scholar] [CrossRef] [Green Version]
- Yang, A.M.; Han, Y.; Zhang, Y.Z.; Wang, L.T.; Zhang, D.; Yang, X.J. On nonlocal fractional Volterra integro-differential equations in fractional steady heat transfer. Therm. Sci. 2016, 20, 789–793. [Google Scholar] [CrossRef] [Green Version]
- Sousa, J.V.D.C.; De Oliveira, E.C. Capelas de: Ulam-Hyers stability of a nonlinear fractional Volterra integro-differential equation. Appl. Math. Lett. 2018, 81, 50–56. [Google Scholar] [CrossRef]
- Zada, A.; Alzabut, J.; Waheed, H.; Popa, I.-L. Ulam-Hyers stability of impulsive integrodifferential equations with Riemann-Liouville boundary conditions. Adv. Differ. Equ. 2020, 2020, 64. [Google Scholar] [CrossRef] [Green Version]
- Sousa, J.; Vanterler da, C.; Oliveira, E. Capelas de: On the Ulam-Hyers-Rassias stability for nonlinear fractional differential equations using the ψ-Hilfer operator. J. Fixed Point Theory Appl. 2018, 20, 96. [Google Scholar] [CrossRef]
- Thaiprayoon, C.; Sudsutad, W.; Alzabut, J.; Etemad, S.; Rezapour, S. On the qualitative analysis of the fractional boundary value problem describing thermostat control model via ψ-Hilfer fractional operator. Adv. Differ. Equ. 2021, 2021, 201. [Google Scholar] [CrossRef]
- Alzabut, J.; Adjabi, Y.; Sudsutad, W.; Ur Rehman, M. New generalizations for Gronwall type inequalities involving a ψ-fractional operator and their applications. AIMS Math. 2021, 6, 5053–5077. [Google Scholar] [CrossRef]
- Seemab, A.; Ur Rehman, M.; Alzabut, J.; Adjabi, Y.; Abdo, M.S. Langevin equation with nonlocal boundary conditions involving a ψ-Caputo fractional operators of different orders. AIMS Math. 2021, 6, 6749–6780. [Google Scholar] [CrossRef]
- Shatanawi, W.; Boutiara, A.; Abdo, M.S.; Jeelani, M.B.; Abodayeh, K. Nonlocal and multiple point fractional boundary value problem in the frame of a generalized Hilfer derivative. Adv. Differ. Equ. 2021, 2021, 294. [Google Scholar] [CrossRef]
- Sousa, J.V.C.; Capelas de Oliveira, E. On the ψ-Hilfer fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 2018, 60, 72–91. [Google Scholar] [CrossRef]
- Granas, A.; Dugundji, J. Fixed Point Theory; Springer: New York, NY, USA, 2003. [Google Scholar]
- Griffel, D.H. Applied Functional Analysis; Ellis Horwood: Chichester, UK, 1981. [Google Scholar]
- Krasnoselskii, M.A. Two remarks on the method of successive approximations. Usp. Mat. Nauk 1955, 10, 123–127. [Google Scholar]
- Valdés, J.E.N. Generalized fractional Hilfer integral and derivative. Contrib. Math. 2020, 2, 55–60. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pleumpreedaporn, S.; Sudsutad, W.; Thaiprayoon, C.; Nápoles, J.E.; Kongson, J. A Study of ψ-Hilfer Fractional Boundary Value Problem via Nonlinear Integral Conditions Describing Navier Model. Mathematics 2021, 9, 3292. https://doi.org/10.3390/math9243292
Pleumpreedaporn S, Sudsutad W, Thaiprayoon C, Nápoles JE, Kongson J. A Study of ψ-Hilfer Fractional Boundary Value Problem via Nonlinear Integral Conditions Describing Navier Model. Mathematics. 2021; 9(24):3292. https://doi.org/10.3390/math9243292
Chicago/Turabian StylePleumpreedaporn, Songkran, Weerawat Sudsutad, Chatthai Thaiprayoon, Juan E. Nápoles, and Jutarat Kongson. 2021. "A Study of ψ-Hilfer Fractional Boundary Value Problem via Nonlinear Integral Conditions Describing Navier Model" Mathematics 9, no. 24: 3292. https://doi.org/10.3390/math9243292