1. Introduction
Because many chaotic phenomena in physics and engineering systems can be associated with homoclinic orbits or heteroclinic cycle, the existence of homoclinic orbits or heteroclinic cycle is critical in chaos research. For example, Chertovskih et al. [
1] discovered a family of periodic and chaotic regimes by bifurcating homoclinic orbits in a nonlinear magnetic field. Li and Tomsovic [
2] demonstrated in multidimensional chaotic Hamiltonian systems that the actions of an unstable trajectory can be expanded into linear combinations of homoclinic orbit actions using the classical action functions. In the field of electronic circuits [
3,
4], there are some methods for designing chaos circuits based on homoclinic orbits or heteroclinic cycles. Furthermore, the Shil’nikov theorem and its extensions [
5,
6,
7,
8] demonstrated that the existence of homoclinic orbits or heteroclinic cycles under certain conditions implies the existence of horseshoes. However, the corresponding existences were simply assumed in these theorems. In some specific dynamic systems, the perturbation method [
9,
10], series method [
11,
12], and numerical computation [
13,
14] are used to demonstrate the existence of homoclinic orbits or heteroclinic cycles. In addition, Leonov [
15] proposed a Fishing principle to explain the existence of homoclinic and heteroclinic cycles in Lorenz-like systems.
For piecewise affine system, its analytic solution, stable manifold, and unstable manifold are easy to be determined, which provides favorable conditions for the construction of homoclinic orbits. For example, Llibre et al. [
16] established some sufficient conditions for the existence of homoclinic orbits in both Shil’nikov and non-Shil’nikov cases. Meanwhile, in a three-parametric piecewise linear system, they discovered the existence of horseshoes. In [
17], Huan et al. proposed a sufficient condition for the existence of homoclinic orbits in three-dimensional piecewise affine systems and demonstrated the existence of horseshoes under appropriate conditions. Yang et al. [
18,
19] recently provided an analytic proof for the existence of homoclinic orbits in a class of three-dimensional piecewise affine systems which is different from the one in [
17]. Wu and Yang also reached some corresponding conclusions in a class of four-dimensional piecewise affine systems(cf. [
20]). They concentrated on piecewise affine systems with one switching plane in the above-mentioned literatures. On the other hand, some practical piecewise affine systems can have multiple switching planes. In some special cases, for example, Chua’s circuit [
3,
4,
21] which can be described as a symmetric continuous piecewise linear system with two switching planes, exhibited a so-called chaotic "double-scroll attractor." Furthermore, Chua et al. [
3] demonstrated mathematically that the double scroll is chaotic when the conditions of Shil’nikov’s theorem are met. Additionally, multi-scroll chaos generation has numerous potential applications in information systems [
22]. Yu et al. [
23] devised a method for generating grid multi-wing butterfly chaotic attractors from a piecewise Lü system [
24,
25].
In this paper, we investigate the existence of homoclinic orbits to saddle-focus equilibrium point in three-dimensional three-zone piecewise affine systems with two switching planes regardless of symmetry. In
Section 2, we give an analytic proof for the existence of one homoclinic orbit and illustrate its effectiveness by two examples. In
Section 3, a sufficient condition for the existence of two homoclinic orbits is obtained. Additionally, we also construct two concrete piecewise affine systems without symmetry which have two homoclinic orbits. Finally, some concluding remarks are given in
Section 4.
2. The Existence of Single Homoclinic Orbit
We consider the following class of three-dimensional piecewise affine systems:
where
,
are constant vectors in
, and
(
) are real numbers. The eigenvalues of
are
with
and
, the eigenvalues of
and
are
,
,
with
and
.
Let
and denote by
the normal vector to
and
. Suppose the left system of Equations (
1)
has an equilibrium point
with
, then
. The middle system
has an equilibrium point
with
. The right system
has an equilibrium point
with
.
Without loss of generality, suppose that
,
,
, where
represent the Jordan canonical forms of matrices
,
, and
, respectively. The invertible matrices
,
,
are given by
,
and
. Here,
and
are the generalized eigenvectors of the matrices
,
and
, respectively. It is worth noting that the Jordan normal forms
and
can have other forms when their eigenvalues are repeated, but our analytic method remains valid. As a result, in order to keep things simple, we will not consider all other forms.
The solutions of system (
2)–(
4) satisfying the initial conditions
are denoted by
, respectively. It is easy to see that
We further assume that
and
in order to ensure the existence of homoclinic orbits. Without loss of generality, we suppose that
. Then we have that
Assume that
and
, we then can get
In the following theorem, we state the conclusion for the existence of single homoclinic orbit of system (
1).
Theorem 1. For the system (1), if the following conditions are satisfied: (i)
There exist real numbers such that andwhere(ii)
There exists a constant such thatand ifthenHere, is the coordinate of under the coordinate system .
(iii)
There exists a constant such thatand ifthenHere, is the coordinate of under the coordinate system .
(iv)
There exists a constant such thatHere, is the coordinate of under the coordinate system .
Then system (1) has a homoclinic orbit connecting the equilibrium point to itself that crosses the switching planes and transversally at , , respectively. Proof. If system (
1) possesses a homoclinic orbit to the equilibrium point
and that orbit crosses
transversally at two points, then one of the points must be
and the other must be in the straight line
. Furthermore, if the following conditions are met, the homoclinic orbit crosses
and
transversally:
- (1)
- (2)
The positive orbit of
satisfies
- (3)
The negative orbit of
satisfies
- (4)
There exists a constant
, such that
- (5)
There exists a constant
, such that
- (6)
There exists a constant
, such that
- (7)
Condition (7) ensures that the homoclinic orbit crosses and transversally at , .
Conditions and clearly hold. Now consider the condition .
The negative orbit of
satisfies
if and only if
Let
, then (
8) is true if and only if the inequality
holds for all
. The expression (
5) enables us to derive
where
We need to guarantee that holds for all . This is exactly the first inequality of condition (i) in Theorem 1. Since , is a damping periodic oscillating function, the inequality holds for all iff for the local maximum point .
Note that
if and only if
, i.e.,
or
If Equations (
10) hold, then
. In other words,
T is a local maximum point of
. On the contrary,
T will be a local minimum point of
. After the calculation of trigonometric, we get
and the corresponding local minimum value
As a result, the second inequality of (i) yields .
Then we consider condition
. Since the coordinate of
is
under the coordinate system
, then
. From the equations of condition (ii), we can conclude
. Additionally,
if and only if
holds for all
. Denote
, then
if and only if
holds for all
. According to (
6), we obtain that
By a simple calculation, we have
Since
, to get
for all
, we need
, i.e., the inequalities in condition (ii). Next, we prove that
for all
if the condition (ii) holds. Let
then
The extreme points of
in
are exactly the zeros of
, according to
. From (
12), if
then
is the unique zero of
. Again, since
, hence
for all
. That is, there is no extreme point in
for
. Therefore
holds for all
.
The proof of condition (5) is similar to the one for condition (4), thus we omit the details.
Next, we will prove the condition (6). By the assumption of (iv), which
is the coordinate of
under the coordinate system
,
. From the equations of condition (iv), we have
. To prove
, we denote
, then
if and only if
holds for all
. From (
7), we obtain that
By calculation, we can get
In view of (
13),
has at most one solution in
. When
has no solution in
, then
for all
. Further,
has a unique maximum point in
. When
has only one solution in
, since
, then
has a unique zero in
. Likewise,
also has a unique extreme value point in
. Again, due to
and
, we can conclude that
for all
.
Finally, the transversal condition
is verified. From the inequalities in conditions
, we gain
Thus, condition holds.
The proof of Theorem 1 is completed. □
Remark 1. We can obtain a similar conclusion with the ones in Theorem 1 when the homoclinic equilibrium point lies in . Therefore, we will not discuss this case here.
Following that, we build two examples to demonstrate the effectiveness of the preceding result.
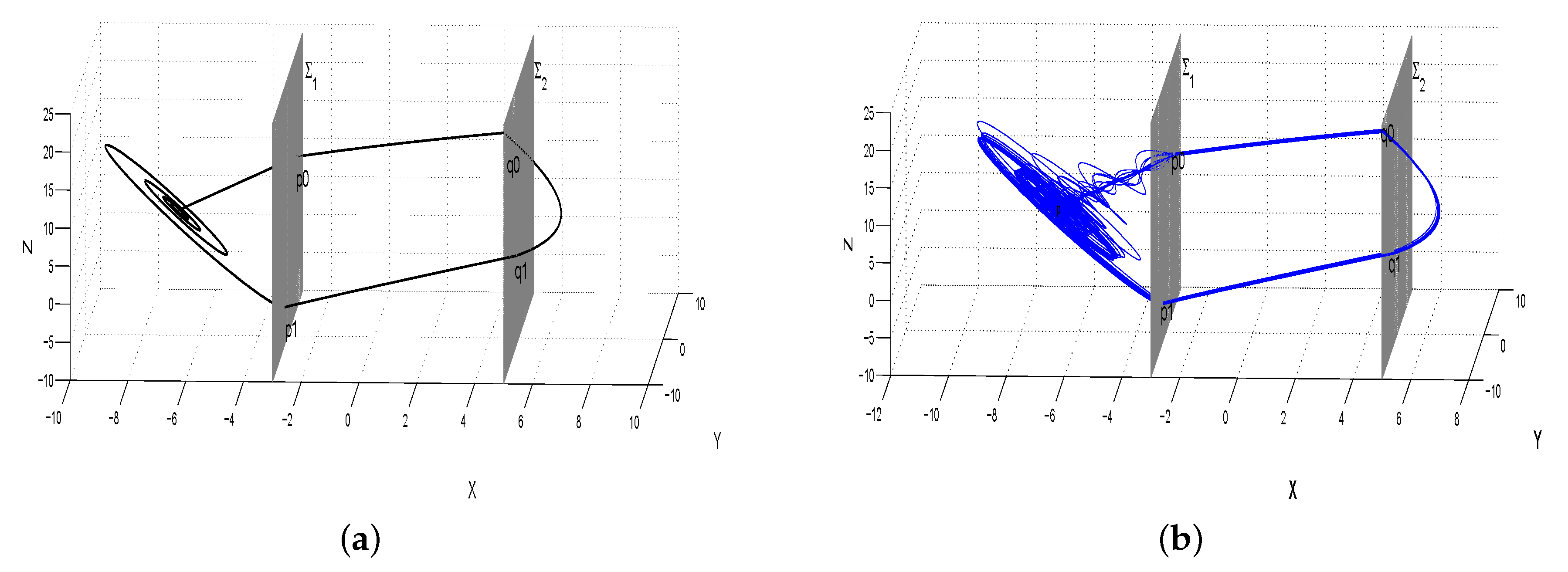
Example 1. Consider the systemwhere , and with By trivial computation, we obtain that , , and , , .
Next, we verify the conditions in Theorem 1. Let
, then we have
. Moreover,
It can be seen that system (
14) meets all the conditions in Theorem 1, so it has a homoclinic orbit to the equilibrium point
.
Remark 2. For piecewise affine systems, there are also some conclusions similar to Shil’nikov Theorem when Shil’nikov-like conditions are satisfied. Huan et al. [
17]
had given a rigorous proof by the topological horseshoe theorem [
26,
27]
based on the ideas of Shil’nikov theorem. Actually, because system (
14) satisfies
, it has infinite numbers of chaotic invariant sets.
Figure 1a,b show the system’s homoclinic orbit and a chaotic invariant set, respectively.
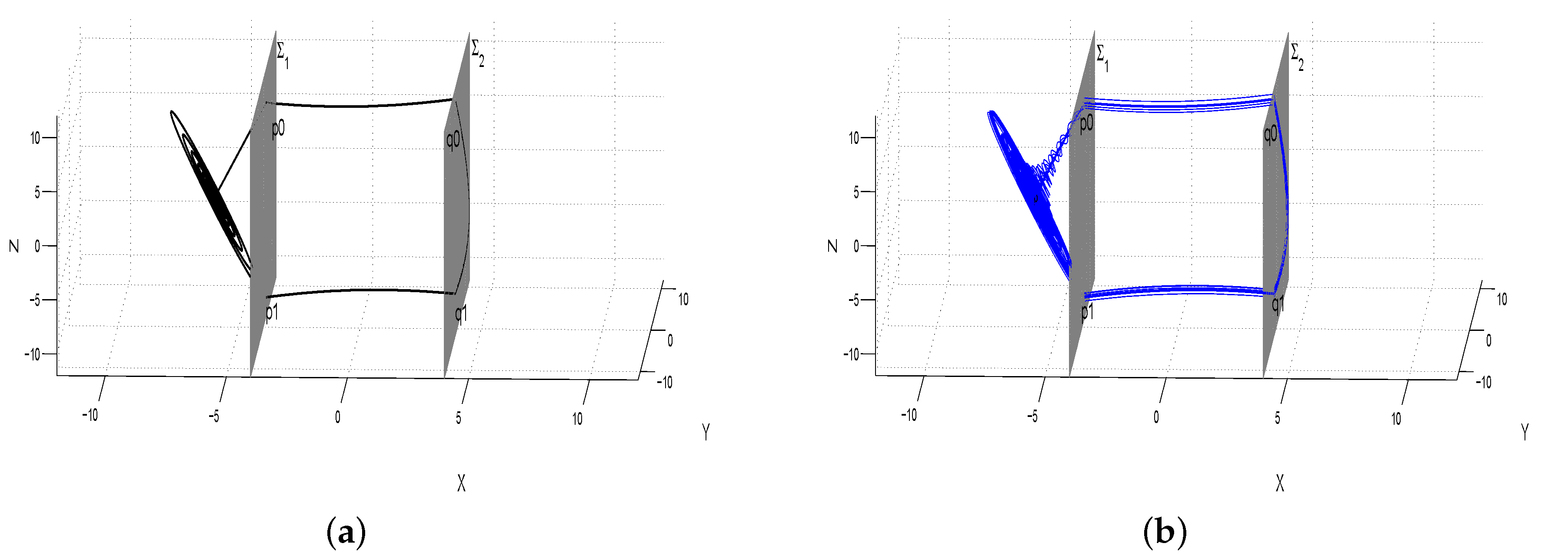
Example 2. Consider the systemwhere,andwith By simple computation, we obtain that , , and , , .
Next, we verify the conditions in Theorem 1. Let
, then we have
. Moreover,
Obviously, system (
15) also satisfies all the conditions in Theorem 1, thus it has a homoclinic orbit to the equilibrium point
. Similarly, system (
15) meets
, implying that it has an infinite number of chaotic invariant sets.
Figure 2a,b show the system’s homoclinic orbit and a chaotic invariant set, respectively.
3. The Existence of Two Homoclinic Orbits
In the sequel, we suppose that the homoclinic equilibrium point lies between the switching planes
and
. We consider the three-dimensional piecewise affine systems as follows:
which have the same elements as system (
1).
Now, we assume that the equilibrium point
corresponding the middle system of (
16) lies between the switching planes
and
(i.e.,
) and
,
. Then we have
and
since plane
is Parallel to
. Denote
and
, then we have
Next, we give a sufficient condition for the existence of two homoclinic orbits of system (
16).
Theorem 2. If the following conditions hold for system (16): (i)
There exist real numbers such that andwhere(ii)
There exists a constant such thatHere, is the coordinate of under the coordinate system .
(iii)
There exist real numbers such that andwhere(iv)
There exists a constant such thatHere, is the coordinate of under the coordinate system .
Then system (16) has two orbits and , which are both homoclinic to the equilibrium point . Moreover, crosses the switching plane transversally at and , meanwhile crosses the switching plane transversally at and . Proof. Because conditions (iii)–(iv) are similar to conditions (i)–(ii), we only prove the first two here. It is equivalent to proving that there is a homoclinic orbit to the equilibrium point with transversal crossing at and . That is, the following conditions hold:
- (1)
- (2)
The positive orbit of
satisfies
- (3)
The negative orbit of
satisfies
- (4)
There exists a constant
, such that
- (5)
Condition (5) ensures that the homoclinic orbit crosses transversally at and .
Conditions and clearly hold.
For condition
, we still denote
, then
where
Therefore,
if and only if
holds for all
. With a simple calculation, we obtain
Similar to the previous analysis, we request
,, i.e.,
On the other hand, we need that
for the local extreme points
. Here,
are the local maximum and minimum points in
, respectively. Thus, we can get
by condition (i).
Since the proofs of condition and are similar to the ones in Theorem 1, the details are omitted here. The proof is then completed. □
Next, we give two examples to illustrate the effectiveness of the conclusion in Theorem 2.
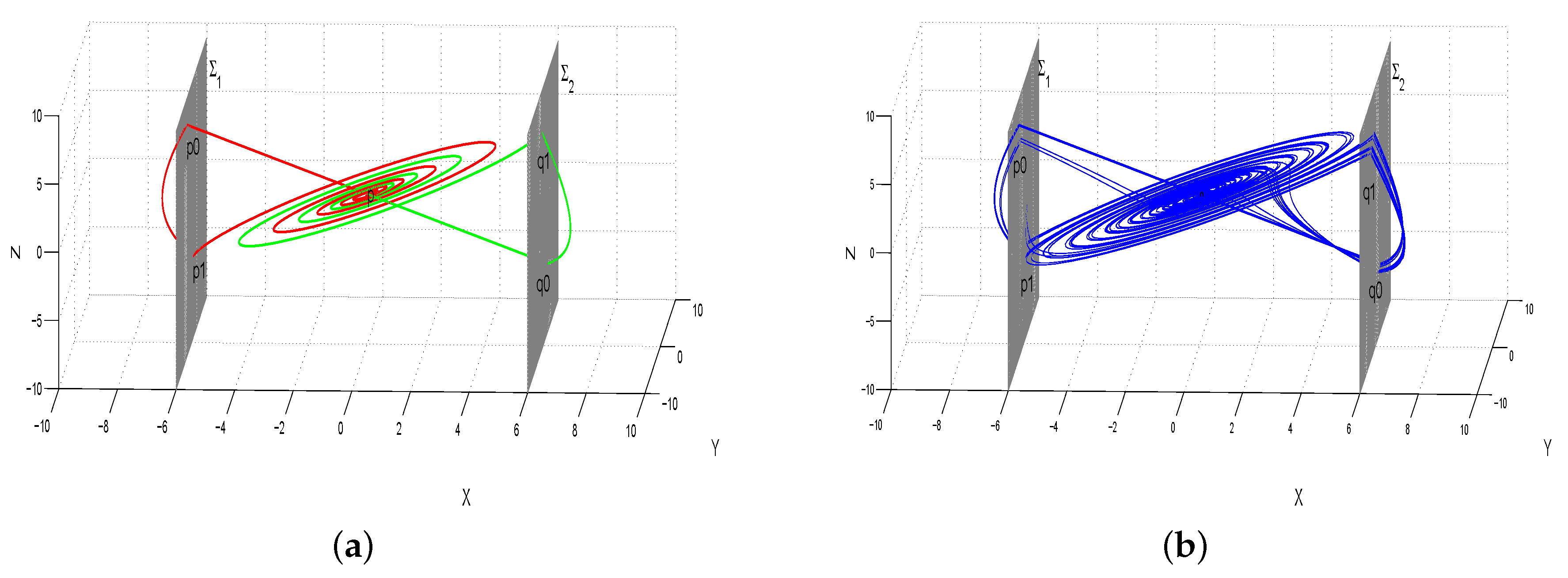
Example 3. Consider the systemwhere , and with Let , we can obtain that , , , and , .
Next, we verify the conditions in Theorem 2.
As a result, system (
17) meets all the conditions in Theorem 2, it has two homoclinic orbits to the equilibrium point
. Simultaneously, it also satisfies the Shil’nikov conditions from
, implying that it has infinite numbers of chaotic invariant sets.
Figure 3a,b show the system’s two homoclinic orbits and a chaotic invariant set, respectively.
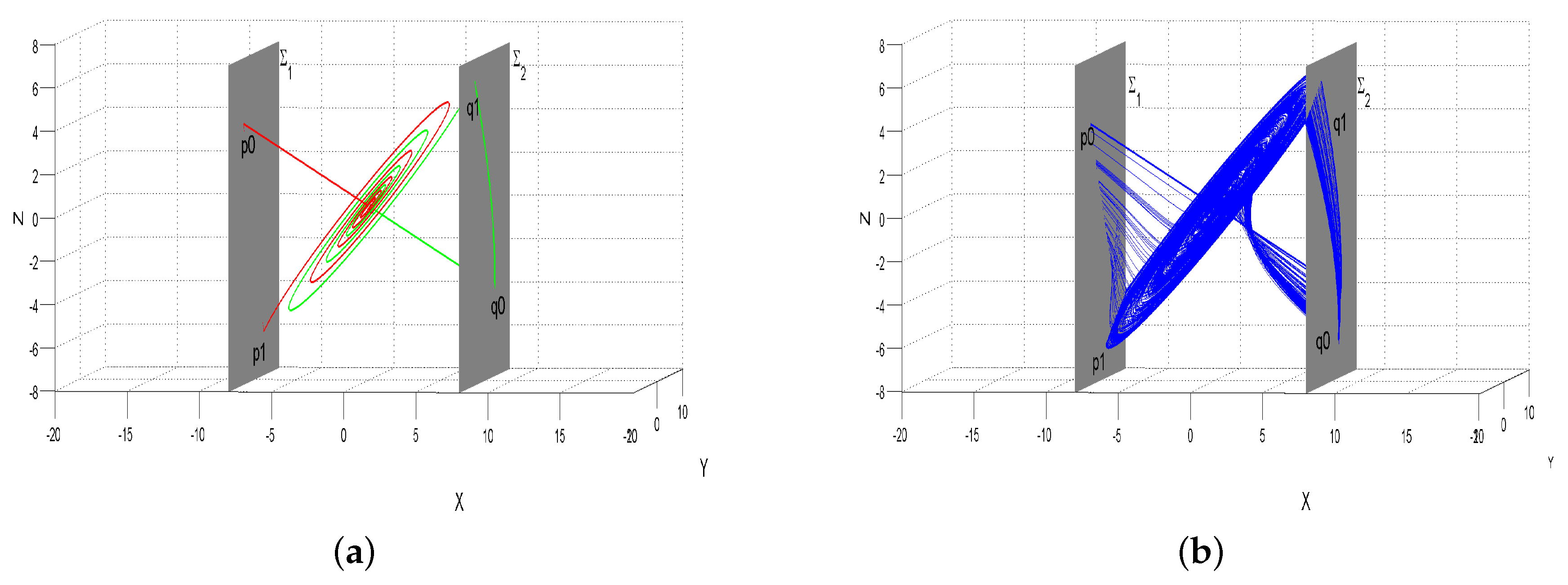
Example 4. Consider the systemwhere , and with Let , we can obtain that , , , and , .
Next, we verify the conditions in Theorem 2.
System (
18) meets all the conditions in Theorem 2, thus it has two homoclinic orbits to the equilibrium point
. It also satisfies the Shil’nikov conditions from
, so it has infinite numbers of chaotic invariant sets.
Figure 4a,b show the system’s two homoclinic orbits and a chaotic invariant set, respectively.



{kind=link}
{kind=link}
{kind=link}
{kind=link}



