1. Introduction
Let be a fixed real number. Given a curve in or a surface in , their respective -offset, denoted by and , is the locus of the points that are at constant Euclidean distance , measured along the normal line, from the curve or surface .
Offsets have a variety of useful applications in computer-aided design, such as tool path control, geometric modeling, NC milling, design of surfaces with homogeneous thickness and tolerance analysis in manufacturing (see, for example, Ref. [
1,
2]). This leads to the fact that they have been widely studied by several authors; see, for example, Ref. [
3,
4,
5,
6,
7,
8,
9,
10]. Moreover, the notion of offset has been generalized in different ways, as reflected in [
11,
12,
13]. Dealing with offset curves is easier when the arc-length of the given curve is polynomial. Thus, Pythagorean hodograph (PH) curves, spatial PH curves, rational PH curves and Minkowski PH curves have been thoroughly studied (see [
14,
15,
16] and the bibliography in [
13]). Regarding surfaces, Pythagorean normal (PN) surfaces were introduced by Pottmann [
17].
It is well known that the offset of a rational curve
or a rational surface
is an algebraic curve or surface, but it is not rational in most cases. In fact, there are numerous articles where conditions for curves and surfaces are studied so that their offsets are rational (see, for example, [
18,
19,
20,
21]). In addition, the implicit equation of the offset is typically of much higher degree than the initial curve or surface, has many terms and coefficients of large size and its calculation involves using elimination methods that are not always effective.
However, G. Salmon proved in his classical texts [
22,
23] that the implicit equation of the offset to non-degenerate conics and to central quadrics can be characterized in terms of the discriminant of a univariate polynomial. We show here that this representation works for the implicit equation of
and
when
is any conic and
is any quadric. These implicit equations are of determinantal type and free of extraneous components; they provide a very compact expanded form and they are very useful when dealing with geometric queries such as point positioning for offsets or solving intersection purposes involving offsets. This is one of the main motivations for deriving these new representations for the offset implicit equations that can be considered a complement to the new lower-degree rational parametrizations of regular quadric offsets introduced in [
18] when manipulating offsets to quadrics. Finally, we should mention that in [
24], a determinantal form for the implicit equation for offsets to non-degenerate conics and quadrics was introduced. Here, we refine these formulas, analyze the degenerate cases, provide explicit proofs and include more applications.
This paper is divided into six sections. Following this introduction, the second section introduces the usual formula defining offsets to plane curves and surfaces. In the third one, the implicit equation of the offset to a conic is presented as the determinant of a or a matrix, the proof being fully computational. The fourth one introduces the implicit equation of the offset to a quadric as the determinant of a or a matrix, the proof being fully computational too. The fifth section shows some geometric queries involving offsets to quadrics where the introduced implicit equations are used. The last section is devoted to the conclusions of the paper.
2. Preliminaries
The next subsections provide some basic notions and the equations describing the offsets to curves and surfaces.
2.1. Conics and Quadrics Representation
Let
be a conic in
. Let
. It is well known that the implicit equation of
in
can be written as
or in matricial form
, where
A is the symmetric matrix
Continuing in the same way, let
be a quadric in
and
. The implicit equation of a quadric
in
can be written as
or in matricial form
, where
and
A is the symmetric matrix
2.2. Describing the Implicit Equation of an Offset
Given a curve
in
, the
-offset to
,
, is the locus of the points in
, which are at constant Euclidean distance
from the initial curve
along its normal line. The offset of a curve is generally not rational (even when
is rational) but it is always an algebraic curve. The implicit equation of the
-offset
is usually a very dense polynomial of higher degree than the one of the original curve. If the curve
is presented by its implicit equation
, then the computation of the implicit equation of
requires the elimination of
and
from these three equations:
Similarly, given a surface
in
, the
-offset to
,
, is the locus of the points in
, which are at constant Euclidean distance
from the initial surface
(along its normal line). As in the case of curves,
is generally not rational. If the surface
is given by its implicit equation
, then the computation of the implicit equation of
requires the elimination of
,
and
from these four equations:
Consequently, the implicit equation of offsets can be obtained using elimination techniques but this can be a time-consuming calculation and, even so, we do not always obtain a closed formula without extraneous factors.
2.3. Discriminant of a Polynomial
Let
and
be two univariate polynomials with coefficients in a field:
Then, the Sylvester matrix of
and
with respect to
x, denoted by
, is defined as
The resultant of
and
with respect to
x, denoted by
, is the determinant of the Sylvester matrix. It is well known that
if and only if
and
have a common nontrivial factor. Moreover, the discriminant of
is defined to be
and it is widely known that
has a multiple root if and only if its discriminant vanishes.
3. On the Implicit Equation for the -Offset to a Conic
Given two conics
and
,
their characteristic equation is defined as
From now on, in this section, we will assume that
is a circle with center
, radius
and
In this case, the characteristic polynomial of a conic
and a circle
is a cubic polynomial in
since
. More precisely, if
we have that
with
.
We say that two conics are touching each other when they intersect in a point with the same tangent line. The following result can be found in [
23].
Theorem 1 (see [
23]).
Given a non-degenerate conic and a circle, they touch each other if and only if their characteristic equation has a multiple root. Next, we observe that the center of a circle belongs to the offset to the conic to distance if and only if is tangent to . This implies that they touch each other and then, according to the previous theorem, the discriminant of must vanish. Moreover, the next theorem shows that not only the discriminant must vanish but it is equal to the implicit equation of the offset.
Theorem 2. Let δ be a positive real number and let be a non-degenerate conic different from a circle. The implicit equation of , , agrees with the discriminant (with respect to λ) of the characteristic equation of and the circle of radius δ and center .
Proof. A point
is on its offset
if there exists another point
with
where
equals the circle of radius
and center
, such that the tangent vectors to
and
at the point
are proportional. This implies that the Jacobian determinant
must vanish at
. Thus, one way to obtain the implicit equation of
is simply to eliminate the variables
from the equations
Assume that our conic
is written in canonical form (see Remark 1). If
, then
Eliminating
from
by performing the next steps,
we obtain
Observe now that if represents either an ellipse or a hyperbola, then the axes and do not belong to the offset. Moreover, and, therefore, we can conclude that the implicit equation is the discriminant.
If A defines a parabola, , proceeding in the same way, it is found that and the implicit equation agrees with the discriminant too. □
Remark 1. If the conic is not presented in canonical form, then there exists a rigid motion of the plane of matrix P, with , that makes the axes of the transformed conic of matrix to be and , with . Hence, the implicit equation of the δ–offset to , as we have seen in the proof of Theorem 2, is the λ-discriminant of , where is the matrix of the circle of center and radius δ. On the other hand, a point lies in the δ-offset of if and only if lies in the δ-offset of . Therefore, the implicit equation of the δ-offset of must be the λ-discriminant of . Since the transformed circle , of center and radius δ, has matrix , where B is the matrix of the circle of center and radius δ, we have Since L is a rigid motion, the principal minor is an orthogonal matrix and the last row is , so , so the λ-discriminant of and agree, so the assumption on the canonical form in the proof of Theorem 2 can be assumed without loss of generality.
The following lemma expresses the discriminant of the characteristic equation of
and the circle of radius
and center
in a compact way in terms of the polynomials
and
presented in (
1).
Lemma 1. Given a conic and a circle, the discriminant of its characteristic equation is given by Proof. The discriminant of
is by definition equal to the resultant of
and
divided by
. If we perform the convenient row operations on the Sylvester matrix of
and
, then we obtain (
2). □
We have the following corollary of Lemma 1 and Theorem 2.
Corollary 1. Given a non-degenerate conic , the implicit equation of , , is given by The next corollaries show smaller matrices providing the implicit equation of the offset for a non-degenerate conic but with higher-degree entries (and one of them is symmetric). They come from different representations of the resultant in terms of the Bezout matrix (see [
25,
26]).
Corollary 2. Given a non-degenerate conic , the implicit equation of , , is given by Corollary 3. Given a non-degenerate conic , the implicit equation of , , is given by Offsets to Degenerate Conics
The above results require a slight modification when considering degenerate conics. Consider, for example, . In this case, has as a double root and so the discriminant is identically zero. This gives a counterexample for Theorem 1.
On the other hand, applying the determinantal representation (
2), when
, it is easy to see that the discriminant factors in the following way:
and this polynomial is a multiple of the implicit equation of the offset. Our next result shows that this problem is easily solved by dividing
by
.
Lemma 2. Given a degenerate conic and a circle, the discriminant of its characteristic equation divided by λ is equal to Proof. Using the notation of (
1),
Using convenient row operations on the Sylvester matrix of
and
, we obtain
as desired. □
Thus, we can generalize Theorem 2 to the case when is degenerate as follows.
Theorem 3. Let δ be a positive real number and let be a degenerate conic. Let denote the characteristic equation of and the circle of radius δ and center . Then, the implicit equation of , , agrees with the discriminant of .
Proof. We will apply the same arguments used in Theorem 2, and assume that our conic
is written in canonical form. Let
If
A defines two parallel lines, that is,
with
, then
. Eliminating
from
by performing the following steps:
we obtain
Since , we can conclude that the implicit equation is the discriminant.
If
A defines two intersecting lines, that is,
with
, then
. Following the same steps as above, we have
Since consists of two lines which intersect at the origin, neither the -axes nor the circle of radius centered at the origin belong to the offset. Moreover, and, therefore, the implicit equation is the discriminant.
If A defines a double line, i.e., , the discriminant of is equal to , which is obviously the equation of the offset. □
We can conclude that the offset of a degenerate conic is defined by the equation
its implicit equation being obtained by simply removing multiple factors.
4. On the Implicit Equation for the –Offset to a Quadric
Given two quadrics
and
,
their characteristic equation is defined as
From now on, in this section, we will assume that
is the sphere with center
, radius
and
Observe that the characteristic polynomial of a quadric
and a sphere
is a quartic polynomial in
since
. If
then we have
with
. Similar to the conics case, the coefficients of
involve the determinants of
submatrices of
A and the coefficients of
involve the determinants of
submatrices of
A.
We say that two non-degenerate quadrics are touching each other if they have a common nonsingular point with the same tangent plane for both quadrics. The next theorem provides a condition for a quadric and a sphere to touch each other.
Theorem 4 (see [
27] for ellipsoids and [
22]).
Given a non-degenerate quadric and a sphere, they touch each other if and only if their characteristic equation has a root of multiplicity greater than one. As in the conic case, we observe that the center of a sphere belongs to the offset if and only if is tangent to and this fact motivates the next theorem.
Theorem 5. Let be a non-degenerate quadric different from a sphere. The implicit equation of , , agrees with the discriminant (with respect to λ) of the characteristic equation of and the sphere of radius δ and center .
Proof. The strategy to follow is similar to the proof of Theorem 2. Reasoning as we did in Remark 1, we can assume that the quadric is written in canonical form. Observe that now the Jacobian matrix is of rank 1. Therefore, every determinant provides us an equation that should vanish. Thus, we have a system of equations in X, Y, Z, x, y and z; we then eliminate X, Y and Z, and hence we obtain a resultant H that has as a factor the discriminant of .
Next, we show this process for the ellipsoid in order to see how this computational proof works.
Suppose that
is an ellipsoid defined by the diagonal matrix
with
Every
determinant of the Jacobian matrix provides an equation and, actually, any two of them specify the normal condition (see [
28]),
At this point, we distinguish two different cases:
: Here, we eliminate the variables Y and Z from and . Thus,
we substitute
for
Y and
for
Z into
and, as a result, we obtain two equations in
X,
x,
y and
z. Since the denominators
and
are different, we obtain two equations in
X,
x,
y and
z of degree 6 in
X, whose leading coefficients in
X are
and
, respectively, which never vanish. Once their resultant with respect to
X is obtained, denoted by
, we have the following factorization of
into a product of distinct polynomials:
Obviously, we must exclude the factor
from the implicit equation of the offset. Moreover, the origin (0,0,0) is in the offset if
,
or
and, in these three cases, the constant coefficient of
is equal to
and vanishes. Thus, we conclude that
defines an implicit equation of the offset.
,
,
: Here, we also eliminate the variables
Y and
Z from
and
. However, the denominators
and
are equal, and so we obtain two equations in
of degree 4 in
X by substituting
for
Y and
for
Z into
Once their resultant is obtained with respect to
X, denoted by
, we have the following factorization of
and
into a product of distinct irreducible polynomials:
such that
By using the same arguments, since the factors must be excluded from the implicit equation, we can conclude that defines an implicit equation of the offset. Observe that the discriminant of specializes properly when because the leading coefficient of never vanishes.
Exactly the same reasoning applies to the other non-degenerate quadrics, i.e., two-sheeted hyperboloid, one-sheeted hyperboloid, elliptic paraboloid, hyperbolic paraboloid, elliptic cylinder, hyperbolic cylinder and parabolic cylinder. □
As for conics, we have the following lemma describing the discriminant of the characteristic equation of
and the sphere of radius
and center
in a compact way by using the polynomials
,
and
introduced in (
3).
Theorem 3 Given a quadric and a sphere, the discriminant of its characteristic equation is given by The following corollary is an immediate consequence of the previous results and gives a very compact formula for the implicit equation of the offset to a non-degenerate quadric.
Corollary 4. Given a non-degenerate quadric , the implicit equation of , , is given by The next corollaries show smaller matrices providing the implicit equation of the offset for a non-degenerate quadric but with higher-degree entries (and one of them is symmetric). They come from different representations of the resultant in terms of the Bezout matrix.
Corollary 5. Given a non-degenerate quadric , the implicit equation of , , is given by Corollary 6. Given a non-degenerate quadric , the implicit equation of , , is given by , defined as the determinant Remark 2. When and are both spheres, the characteristic polynomial has always a root of multiplicity two, , because two spheres always have a double contact at infinity (see Art. 202 in [22]). Then, its discriminant is equal to zero. However, if we eliminate the factor from , we have the same result as in Theorem 5. More precisely, assuming that is a sphere of radius R given in canonical form, we have and the discriminant of factors into the two spheres that define the offset of , . The case of two circles is similar: we eliminate the factor in in order to get the desired result. Remark 3. G. Salmon proved in his classical texts [22,23] that the offset to non-degenerate conics and to central quadrics can be characterized in terms of the discriminant of a univariate polynomial. Moreover, he introduces a way to “express the coordinates of the parallel surface by means of two parameters” by using either the roots of the aforementioned discriminant (a double root and two simple roots with a dependence among them) or the length of the axes of the two confocal quadrics through a point. However, to the best of the authors’ knowledge, for any general point in the offset (or its foot in the ellipsoid), the situation is equal to the case of its symmetric points in the other eight octants defined by the axes of the ellipsoid, both regarding the roots and regarding the confocal quadrics (which share axes with the ellipsoid). This makes such parametrization a radical one of order eight. We are, however, more interested in rational parametrizations for the offsets or in their implicit equations when the others are difficult to compute or to use (see Section 5.4). Offsets to Degenerate Quadrics
As expected, the above results are not totally correct for degenerate quadrics:
. In this case, the discriminant of
factors into
and it is a multiple of the implicit equation. However, depending on the quadric, we will need either the discriminant of
or of
. Using the notation in (
3), we have the next formula.
Lemma 4. Given a degenerate quadric and a sphere, the discriminant of its characteristic equation divided by λ is equal to If, moreover, (i.e., when ) then Next, we will see what happens with two degenerate quadrics: a real cone and two real intersecting planes. The first one requires the discriminant of , whereas the second requires that of .
Suppose that
is a real cone defined by the diagonal matrix
with
As before, every
determinant of the Jacobian matrix provides an equation,
and we eliminate the variables
from
and
. Thus, we substitute
for
Y and
for
X into
and, as a result, we obtain two equations in
. From here, following the same reasoning as in the ellipsoid case, we conclude that the discriminant of
is a factor of the resultant and defines the implicit equation for the considered offset.
Suppose that
is a quadric defined by the diagonal matrix
with
As before, every
determinant of the Jacobian matrix provides an equation,
and we eliminate the variables
from
and
Thus, we substitute
for
Y and
z for
Z into the equations
and, as a result, we obtain two equations in
. Once their resultant is obtained with respect to
X, denoted by
, we have the following factorization for
:
Neither the cylinder
nor the
x-axis or the
y-axis belong to the offset, so we can conclude that
defines an implicit equation of the offset. In fact, the following factorization of the discriminant in terms of
a and
b (up to a constant) provides the four planes defining the offset:
In order to treat other degenerate quadrics, the discriminant of must be considered for double planes and the discriminant of for elliptic, hyperbolic and parabolic cylinders.
5. Answering Geometric Queries Involving Offsets to Conics and Quadrics
In this section, we present several examples of how the different representations of the implicit equation of the offset to a conic or a quadric can be used to deal with two different geometric queries about these offsets: point positioning and several intersection instances.
The first and immediate application of the presented formulae is to decide when a given point belongs to the offset to distance of a conic or a quadric. To answer this question, we can use the different determinantal representations presented so far but we want to quote here the explicit and compact formulae introduced in Corollary 1, Corollary 4 and Lemma 4:
the point
P is in the
–offset to the non-degenerate conic defined by
A if
the point
P is in the
–offset to the non-degenerate quadric defined by
A if
the point
P is in the
–offset to the cone or the cylinder defined by
A if
These implicit equations are presented in such a way that they are very useful for evaluation purposes:
Checking if P is in the –offset to the non-degenerate conic defined by A requires us to evaluate , , , and .
Checking if P is in the –offset to the non-degenerate quadric defined by A requires us to evaluate , , , , , , , , and .
Checking if P is in the –offset to the cone or the cylinder defined by A requires us to evaluate , , , , , and .
Apart from solving the point positioning problem, implicit equations appear to be useful when dealing with intersection problems if the size and structure of such implicit equations are good enough. For example, to compute the intersection of the offset of a quadric with a surface parameterized by
, one can replace each coordinate in the
in Corollary 4 by its corresponding parametric expression so that the intersection equation is given by
with
. Several examples of this situation are presented in what follows:
In
Section 5.1, we compute the plane section of the offset of an ellipsoid.
In
Section 5.2, we compute the intersection curve between a parabolic cylinder and the offset of a one-sheet hyperboloid.
In
Section 5.3, we show the ray tracing of the offset to an ellipsoid.
In
Section 5.4, we introduce some of the difficulties that may arise when using a rational parametrization of the offset (if available) to deal with intersection queries.
Finally, in
Section 5.5, we show how to compute the intersection between a spatial curve rationally parametrized and the offset to an ellipsoid.
All these examples have been analyzed by using Maple 2018 and, in some of them, we tried to use additionally standard elimination procedures, such as Gröbner bases, without success due to the huge size of the involved equations.
5.1. Sectioning the Offset to an Ellipsoid
Let
be the ellipsoid given by the equation
and we compute the section of its offset
by the plane parameterized by
The determinant in Equation (
4) produces the implicit equation of the section in the
-parameter space. We can choose 80 equally spaced values of
s and find the corresponding values of
t by using the implicit equation of the offset. There are two ways to determine these values:
Next, we follow the same steps, exchanging the roles of s and t. In both cases, for each pair , we find the corresponding point on the sectioning plane.
With the generalized eigenvalue method, a total of 442 points in the intersection curve are obtained in 1.313 s. Using fsolve, 440 points are produced in 0.828 s. Although the second method is faster, some solutions may be missed with fsolve, and one may need to increase the precision digits.
Figure 1 shows the interior and exterior offsets with points in the sectioning in red.
5.2. Intersecting the Offset of a Hyperboloid with a Surface
We consider the intersection of the offset of the one-sheet hyperboloid with implicit equation
and the parabolic cylinder parameterized by
. We introduce this parametrization in the determinant in Equation (
4) to obtain the determinantal form of the implicit equation of the curve in the
-plane that represents the intersection curve of the two considered surfaces.
As in the previous example, one may choose not to expand the determinant and use the generalized eigenvalue approach, or to expand the determinant to obtain a bivariate polynomial equation of degree 24 in u and degree 12 in v. In any case, 654 points in the intersection curve were generated in 1.798 s when using generalized eigenvalues and 0.953 s when using the Maple command fsolve.
Figure 2a shows the curve in the parameter space and
Figure 2b the interior and exterior offsets of the hyperboloid, the parabolic cylinder and the red points those belonging to the intersection.
5.3. Intersecting the Offset to a Quadric with a Cone (Ray-Tracing)
Next, we intersect the offset with the cone with vertex at and passing through the circle . We generate 150 rays into the considered cone, each one to be intersected with . Three possibilities arise here:
developing the determinant defining , replacing by each ray equation and solving the obtained equation,
replacing by each ray equation in the matrix defining , developing its determinant and solving the obtained equation, and
replacing by each ray equation in the matrix defining , moving the determinant giving to a generalized eigenvalue problem (two matrices) and computing the associated real generalized eigenvalues.
Finally, we obtain 260 points. The first two options require an increase in the Maple precision from to in order to achieve the correct results. The first option took 13 s, the second option 2 s and the third option s, showing that, even for moderate size problems (for the matrices involved), computing generalized eigenvalues is usually the best strategy in terms of accuracy and efficiency.
Figure 3 shows in two pictures the intersection of the 150 rays with the two components of
(left: exterior, right: interior).
5.4. Trying to Use the Parametrization of the Offset in Geometric Queries
An alternative approach to deal with the intersection of the offset of a quadric and another surface S could be to use the implicit equation of S and a parametrization of . However, it is not easy, in general, to obtain a suitable parametrization of the offset for this kind of intersection problem.
For example, Krasauskas and Zube in [
18] find a rational parametrization for the
-offset of an elliptic paraboloid
, assuming that it is not of revolution. This parametrization is of the form
, where
is a rational Gauss map of
, and
is a PN-parametrization of
obtained from
;
has bidegree
. To obtain the parametrization, they start from a standard rational parametrization of the unit sphere and apply a suitable hyperbolic rotation. Thus, there are two umbilic points,
and
for any
, such that all the curves
pass through them.
The three components have a factor t in the denominator, whence the domain of the parametrization must be contained in . It must be taken into account that the orientation of depends on the sign of t. Even if the values are avoided, there is not a single domain for that produces a single patch parameterizing the whole elliptic paraboloid, such that is one-to-one. Therefore, for solving the intersection problem, one must carefully choose the domains that cover the required regions of P with a one-to-one mapping.
5.5. Intersecting the Offset to a Quadric with a Curve
Similar to the intersection with a surface, to compute the intersection of the offset of a quadric with a parameterized curve, one may replace each coordinate in the in Corollary 4 with the corresponding one in the parametrization of the curve. The roots of the determinant so obtained are the parameter values that define the intersection points.
For example, consider the same ellipsoid as in
Section 5.1 and the curve
given by the parameterization
. The problem to solve is to determine the intersection points of
and
. Again, there are two ways to approach this problem:
Determining the degree 48 polynomial by developing the determinant defining and computing its real roots (six).
Moving the determinant providing to a generalized eigenvalue problem (two matrices) and computing its real generalized eigenvalues (six, too).
Figure 4 shows, from two different points of view, the six intersection points together with the initial ellipsoid and its interior and exterior offsets: two intersection points with the interior offset and four with the exterior one (for deciding to which offset belongs each intersection point is enough to check if it is inside or outside the considered ellipsoid).
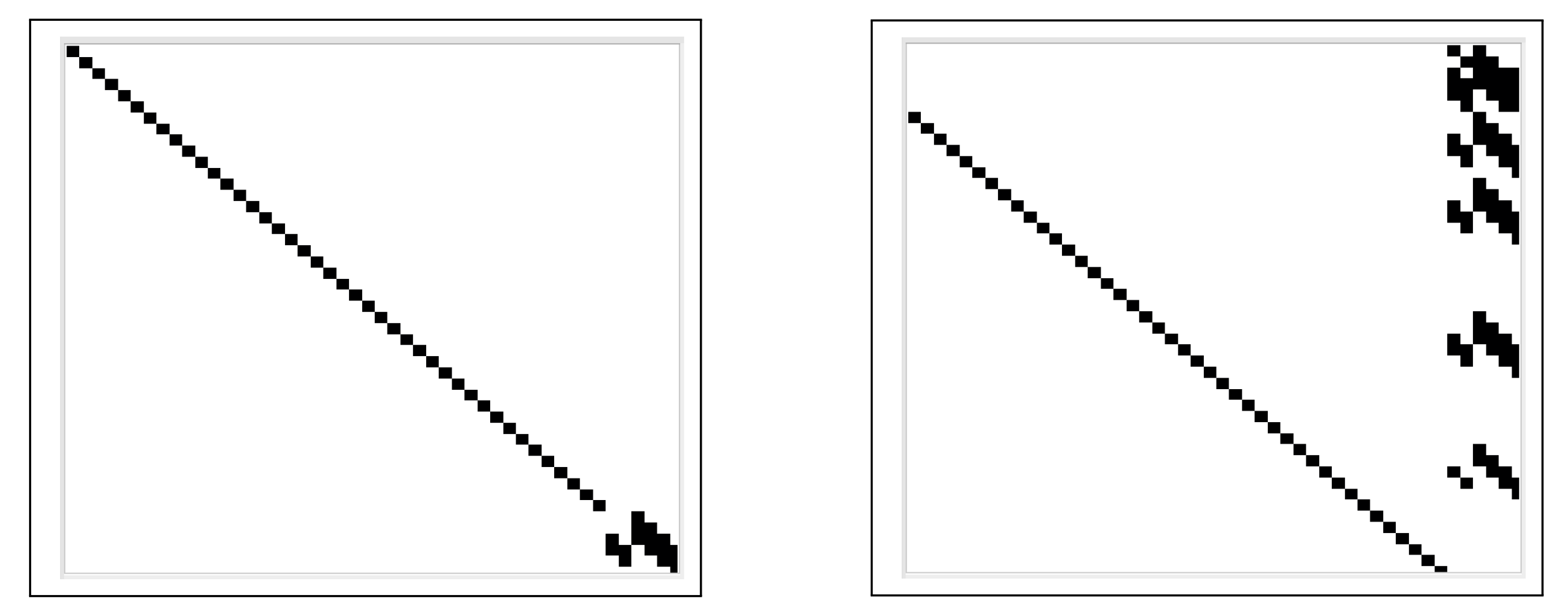
Remark 4. The determinantal expressions derived for the offset to conics and quadrics show very good behavior when solving intersection queries through a generalized eigenvalue problem: they eliminate infinite eigenvalues and the pencil of matrices derived from these determinants is very sparse. The shape of the two matrices in the previous examples is reflected in Figure 5. For the previous example, computing the huge polynomial takes 0.562 s and determining its real roots 0.579 s, while the pencil of matrices is determined in 0.063 s and computing its generalized eigenvalues requires 0.07 s.
6. Conclusions
Starting from the implicit equations of conics and quadrics, we have introduced a new way to obtain the implicit equation of their corresponding offsets, highly efficient to solve geometric problems such as point positioning or for solving intersection problems. This new method consists of describing the offset directly as the discriminant of a characteristic equation. This new description, on the one hand, avoids the use of complex elimination techniques and, on the other, allows the use of typical tools for numerical matrix analysis, such as the generalized eigenvalues.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




