The proposed identification method was tested and compared with other identification methods. The calculation of the characteristic areas was performed either in the frequency-domain (directly from the process transfer function) or in the time-domain (from the process open-loop time response).
The frequency response error was evaluated using the following criterion:
where
jω is the complex angular frequency. The lower (ω
0) and upper (ω
C) frequency bounds were selected to cover the process frequency response from around 0 to the frequency corresponding to ∠
GP(
jω) = −180°. This is a common choice when the purpose of the process model is a controller design. The frequency points were chosen in geometric progression, as arithmetic progression would disproportionately favour higher frequency regions. Due to the geometric progression, ω
0 is not zero, but a relatively low frequency, defined by the following expression:
where the characteristic areas
A0 and
A1 are calculated from the actual process
GP(s). As already mentioned, the upper bound (cutoff) angular frequency ω
C is corresponding to ∠
GP(
jω) = −180°. The frequency vector ω has been defined from ω
0 to ω
C with 10
5 points per decade.
4.1. Model Identification from a General-Order Transfer Function with a Time Delay
In this subsection, the proposed identification method was tested in the frequency-domain, i.e., the characteristic areas are calculated from a process transfer function. For this purpose, the method was tested on the following family of the process models:
where
b,
Tdelay,
T, and
n represent the process numerator time constant, the time delay, the time constant, and the process order, respectively. The test experiments were performed for different values on all four parameters of the Process (24). The time constant
T was calculated from the selected process order and time delay as follows:
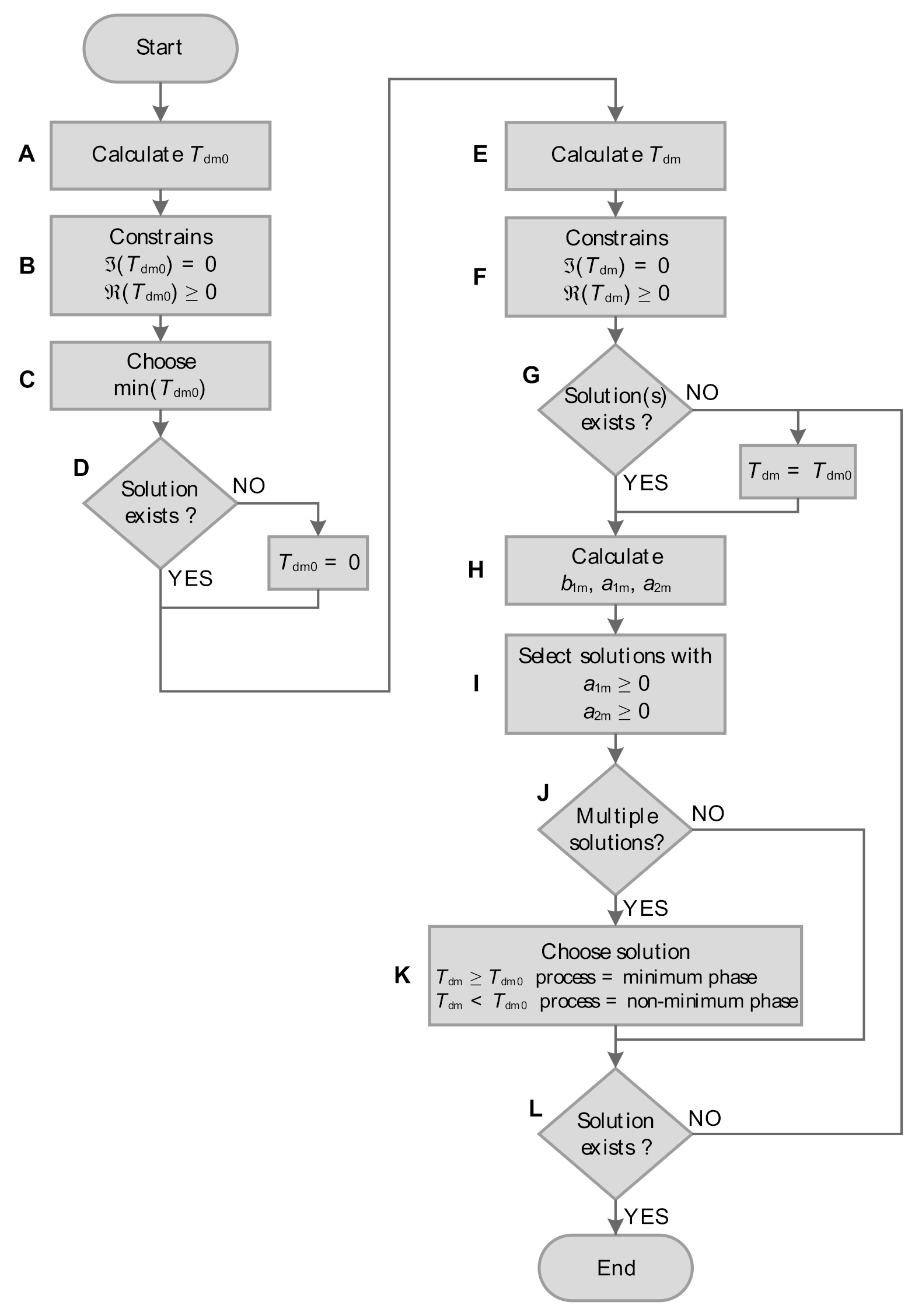
Expression (3) was used to calculate the characteristic areas from the transfer function of the Process (24). Then, the parameters of the Process model (9) were calculated from the characteristic areas, according to the flowchart shown in
Figure 1.
The actual flow of the algorithm in
Figure 1 depends on the selection of the parameters in the Process (24). The results of all the conditions (rhomboid-shaped blocks in
Figure 1) for a different selection of the process parameters (process zero, time delay, time constant, and process order) are shown in
Figure 2. The conditions shown represent all the decisions made by the algorithm. For example, D = NO, means that the answer of block D in
Figure 1 is NO (there is no real positive solution for the process model time delay
Tdm0), G = NO means that there is no real positive solution for the process model time delay
Tdm, J = YES means that there are multiple solutions for computing the dynamic process parameters
a1m and
a2m, and L = NO indicates that there are no solutions for the model parameters when
Tdm is used, so in the next iteration
Tdm =
Tdm0. Note that for each process, only one of the conditions shown in the figure is met so that there is no overlap.
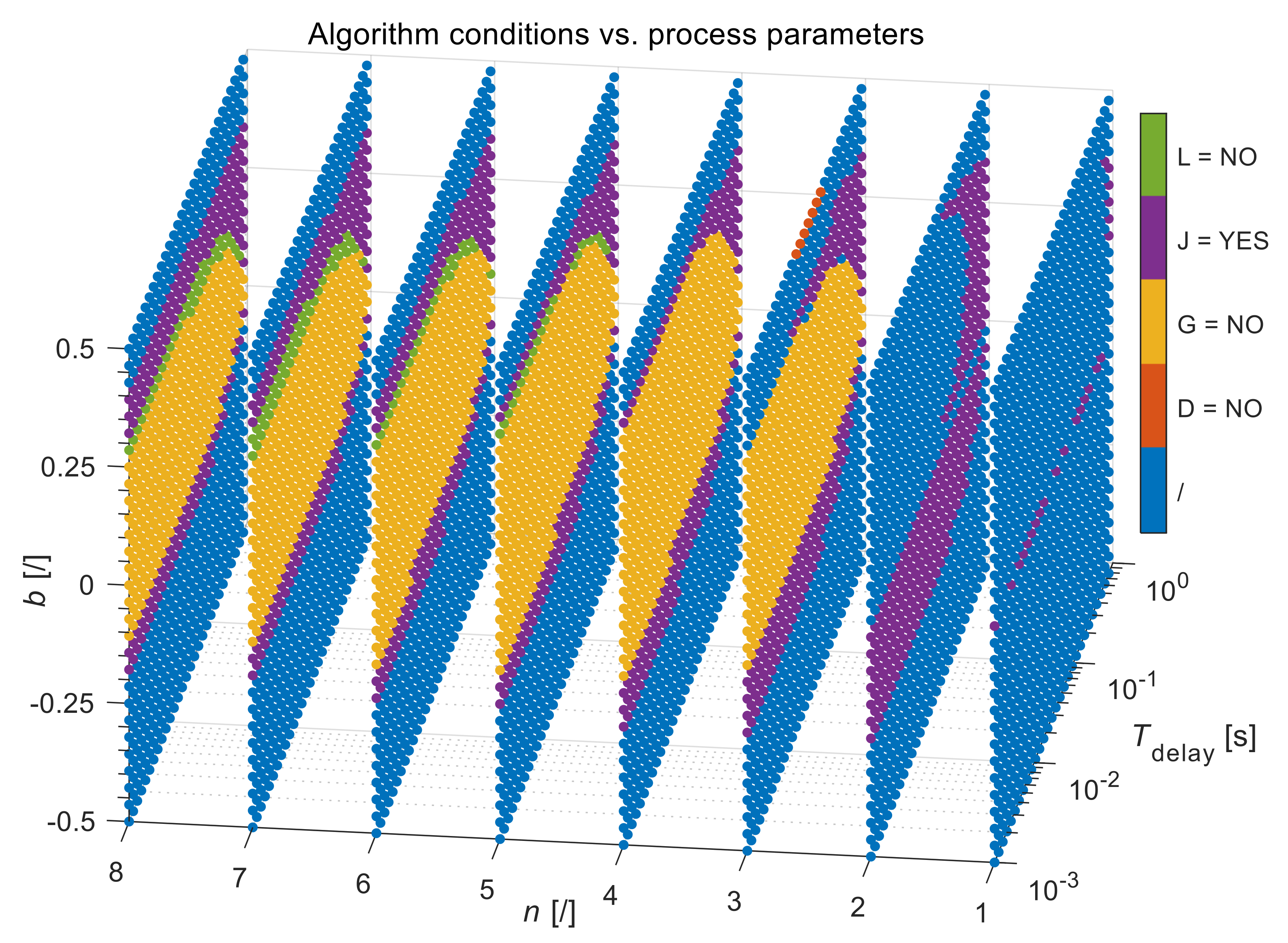
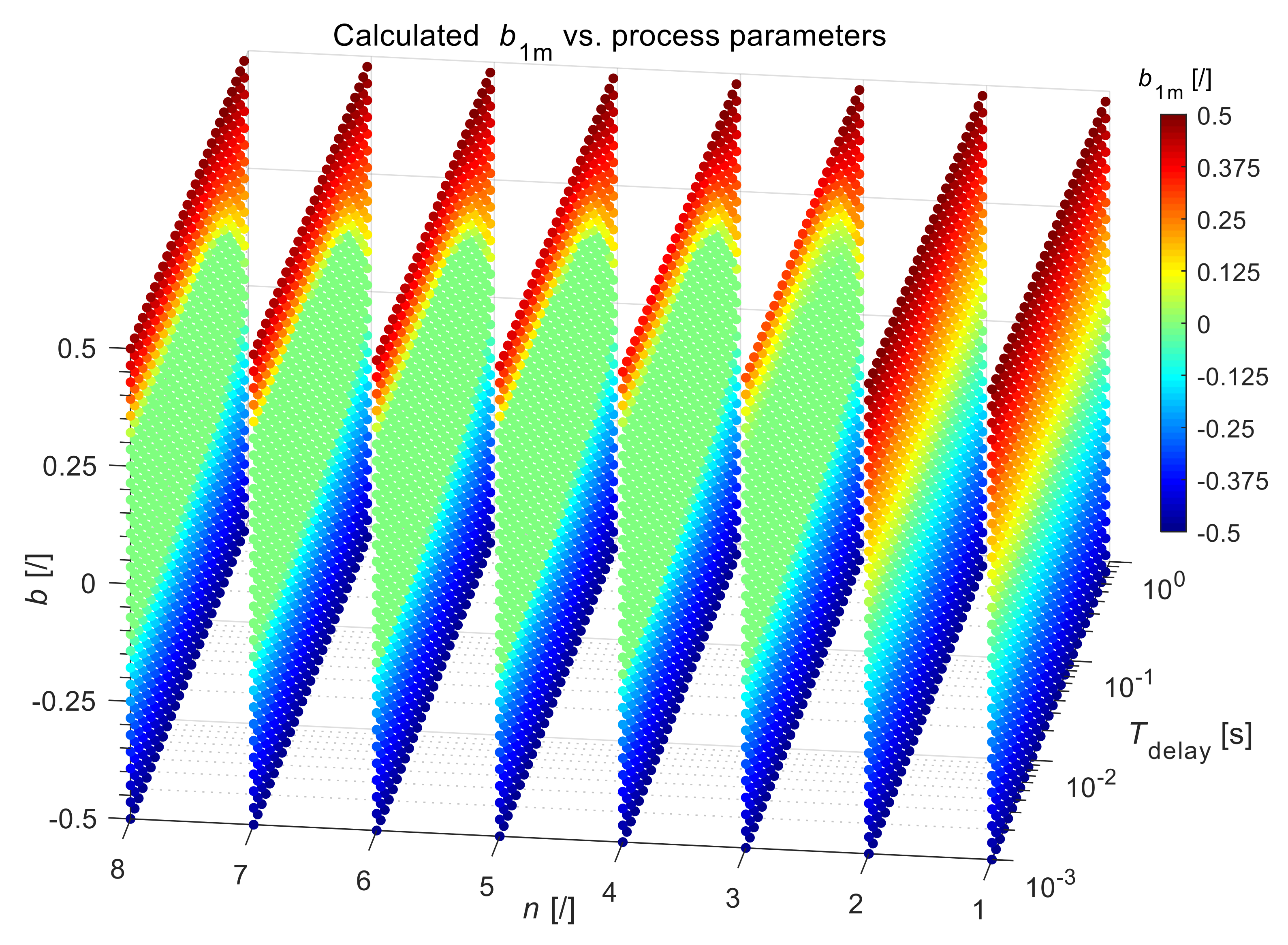
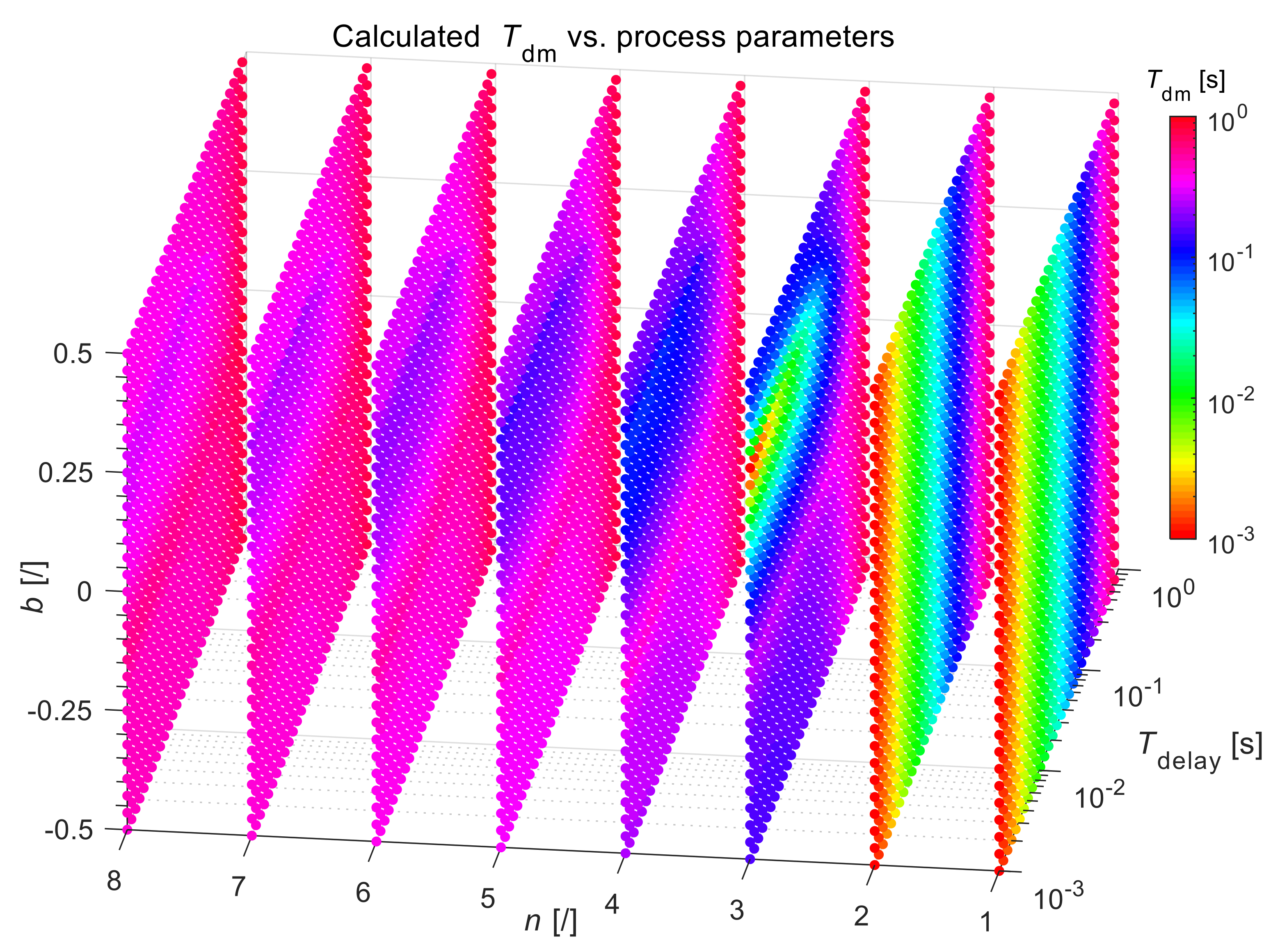
The calculated Process model (9) parameters
b1m and
Tdm for the selected process
GP1 parameters are shown in
Figure 3 and
Figure 4, respectively. As can be seen from
Figure 3 and
Figure 4, the calculated process model parameters
b1m and
Tdm for lower-order processes (
n = 1, 2) are identical to the actual process parameters
b and
Tdelay. For higher-order processes (
n = 3–8), the calculated
b1m deviates from
b, and becomes zero for a wider set of actual process parameters, while the calculated time delay
Tdm becomes higher than the actual time delay
Tdelay, as expected.
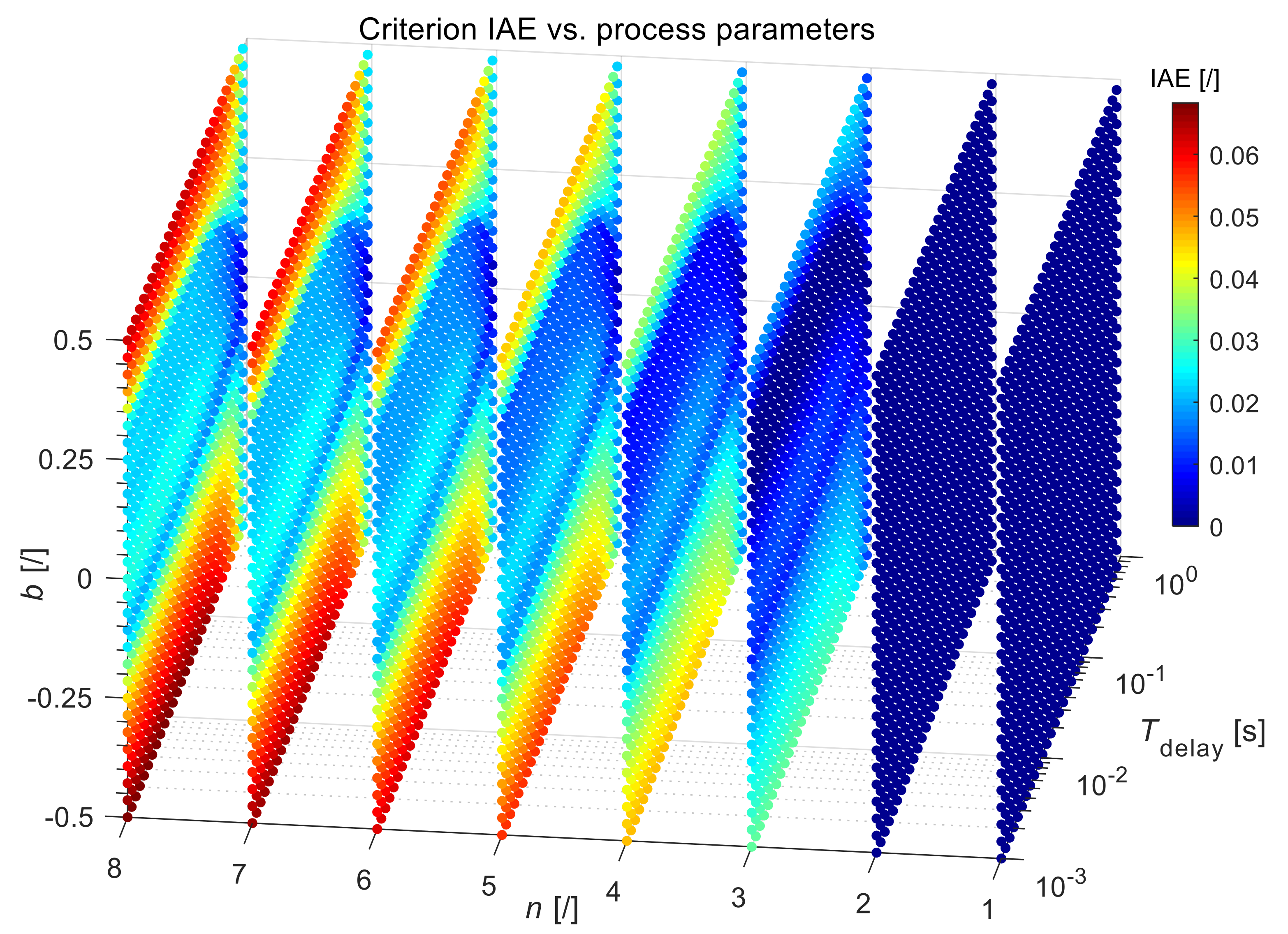
The IAE criterion values for the process
GP1 are shown in
Figure 5. The IAE criterion is 0 for the first- and the second-order processes (perfect fit), and it increases as the process order and numerator time constant
b increase. However, the maximum value of IAE remains relatively low (0.068).
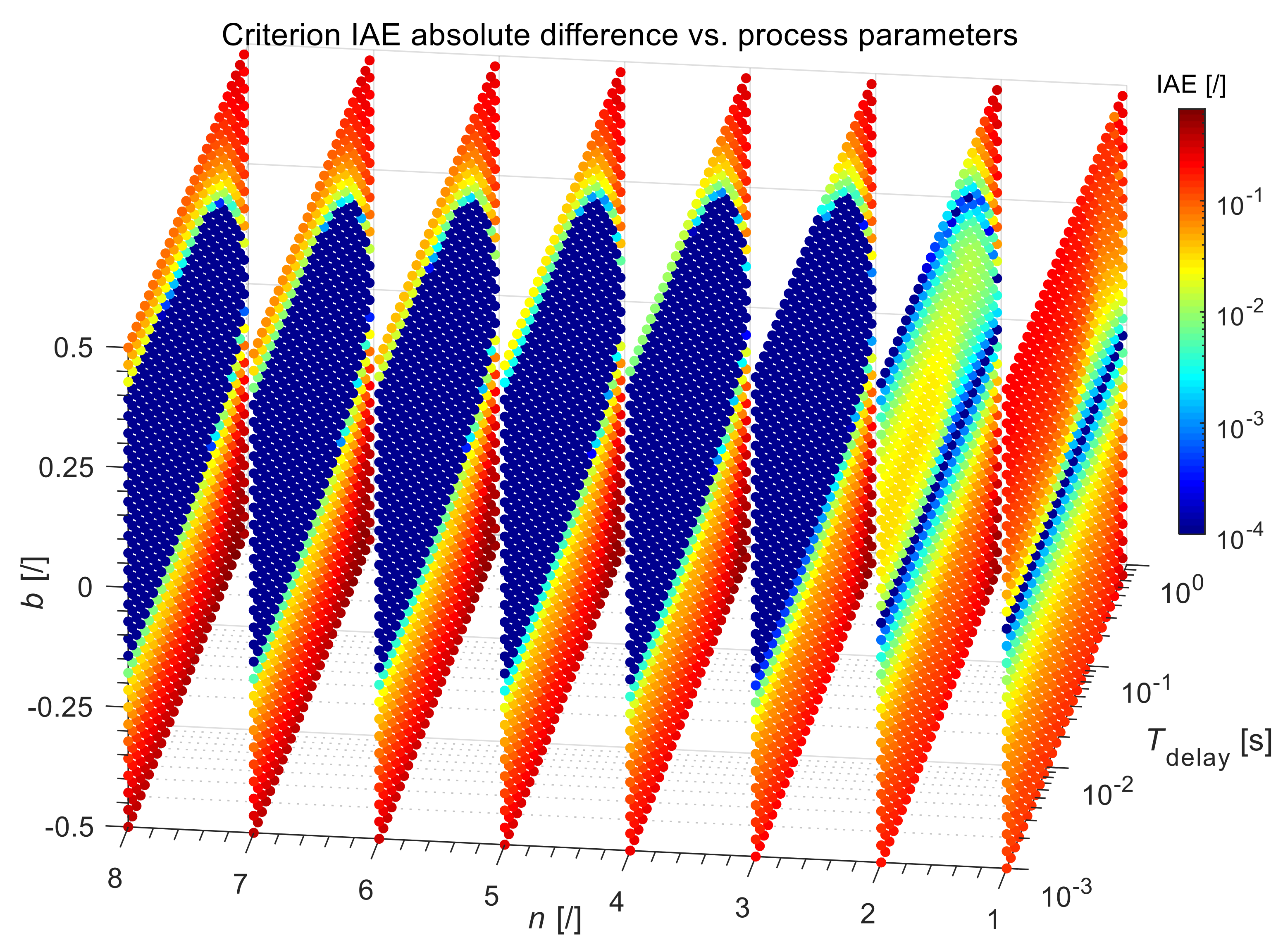
Next, the proposed model identification method was compared with that of Vrečko et al. [
44] (the method with fixed
b1m = 0). For this purpose, the absolute difference of IAE criteria was calculated by the following expression:
If the performance of both methods is identical, the calculated criterion difference will be 0, otherwise, the value will be larger.
The absolute difference of the IAE criterion for the process
GP1 is shown in
Figure 6. As expected, the IAE values of both methods are identical in the cases where
b1m = 0. However, in other cases, the difference of IAE criteria confirms the superiority of the proposed model identification method. Note that the maximum difference of the IAE
Δ criterion is 0.67.
4.2. Model Identification from an Open-Loop Time Response of the Process
In this subsection, the proposed identification method was tested in the time-domain, i.e., the characteristic areas of the process are identified from an open-loop time response of a process during the steady-state change. For this purpose, the following common process models were selected:
A step-change input signal was applied to the presented processes. Note that the sampling period was set to TS = 1 ms. The output responses of the processes were then used to calculate the areas and consequently the parameters of the models.
The calculated characteristic areas
A0–
A4 from the process responses are given in
Table 1, according to the Expressions (4)–(6). Note that in order to reduce the numerical error, processes
GP1–
GP6 input and output signals were first filtered with a first-order low-pass filter with a time constant of 10 ms. Then, the parameters of Model (9) were calculated from the characteristic areas, according to the flowchart shown in
Figure 1.
The processes
GP1–
GP3 were compared with three other model identification methods [
28,
33]. All the chosen methods provide analytical tuning formulas for calculating the model parameters. The first one was the method of Broida [
33], which is intended for estimating the higher-order processes. The method provides the next model transfer function:
where
n is the order of the model (1)–(6). The second was Åström’s method (time integral approach) [
28], hereafter referred to as Åström (time integral). The method obtains the next second-order model:
The third was Åström’s method (model-fitting approach) [
28], hereafter referred to as Åström (model-fitting). The method obtains the next first-order model:
The identified model parameters (28)–(30) were calculated from the step responses of the processes.
Processes GP4–GP6 are compared with other step and relay identification methods that will be described individually. The model parameters for these methods were taken from the literature.
The sensitivity to the process noise was tested on the process GP7.
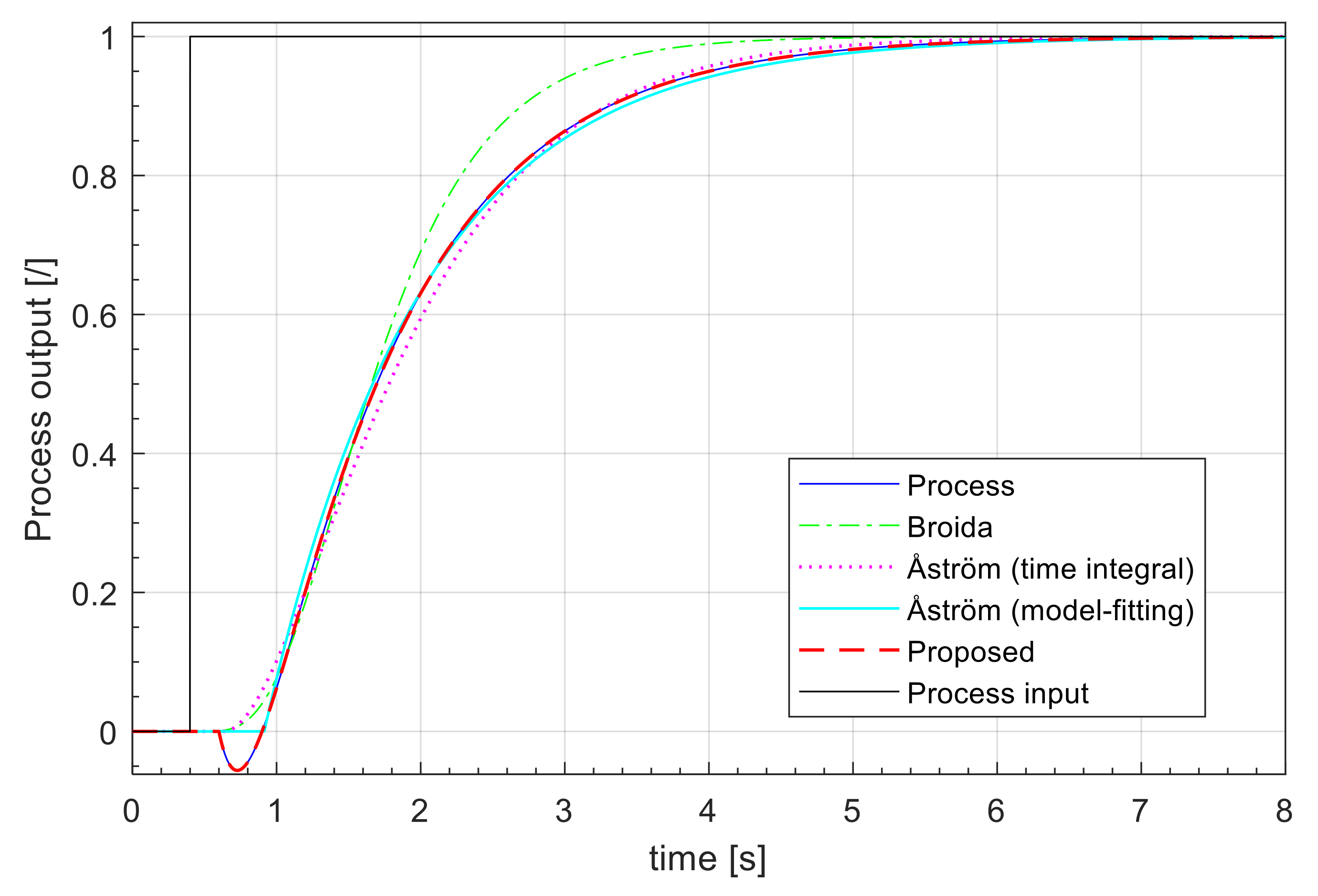
Case 1
The Broida, two Åströms methods, and the proposed method were tested on the second-order process with zero plus time delay. The estimated model parameters process
GP1 are given in
Table 2.
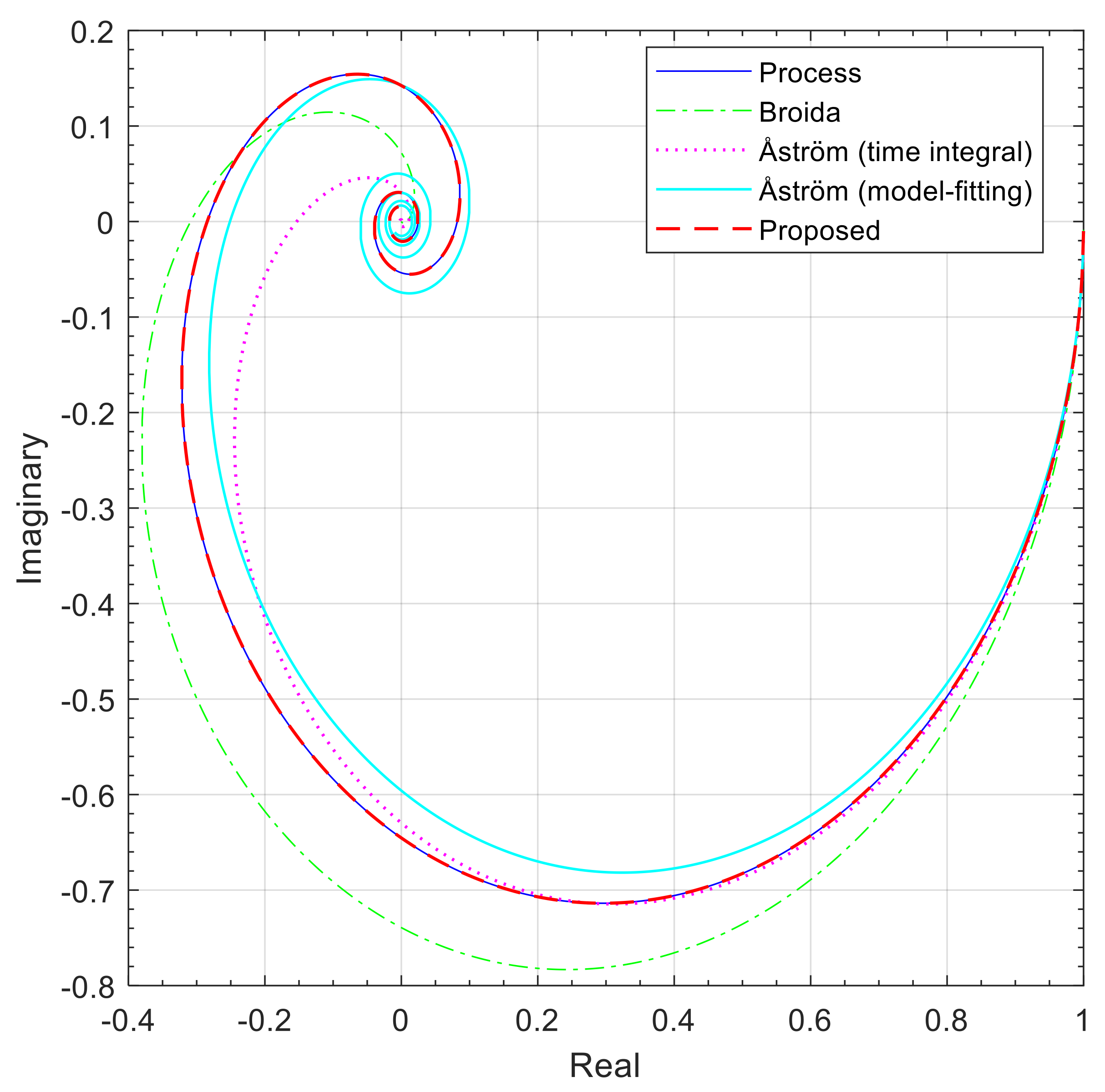
Figure 7,
Figure 8 and
Figure 9 compare the step responses for
u = 1, Bode, and Nyquist plots of the aforementioned identification methods. The criteria values are given in
Table 3. Note that for the calculation of the criterion ERR, ω
0 = 6.25 × 10
–3 and ω
C = 3.369 rad/s. The Nyquist plot in all the examples is plotted in the frequency range from ω
0 to ω
0 × 10
4 rad/s. Similarly, the Bode graph in all the examples is plotted in the frequency range from ω
0 × 10 to ω
C rad/s.
The figures show that the proposed identification method gives a perfect fit between the identified and the actual process model. This is confirmed by the lowest criteria in the time- and the frequency-domain. The Åström (model-fitting) method was ranked second.
Case 2
The Broida, two Åströms methods, and the proposed method were tested on the higher-order process. The estimated model parameters for the process
GP2 are given in
Table 4.
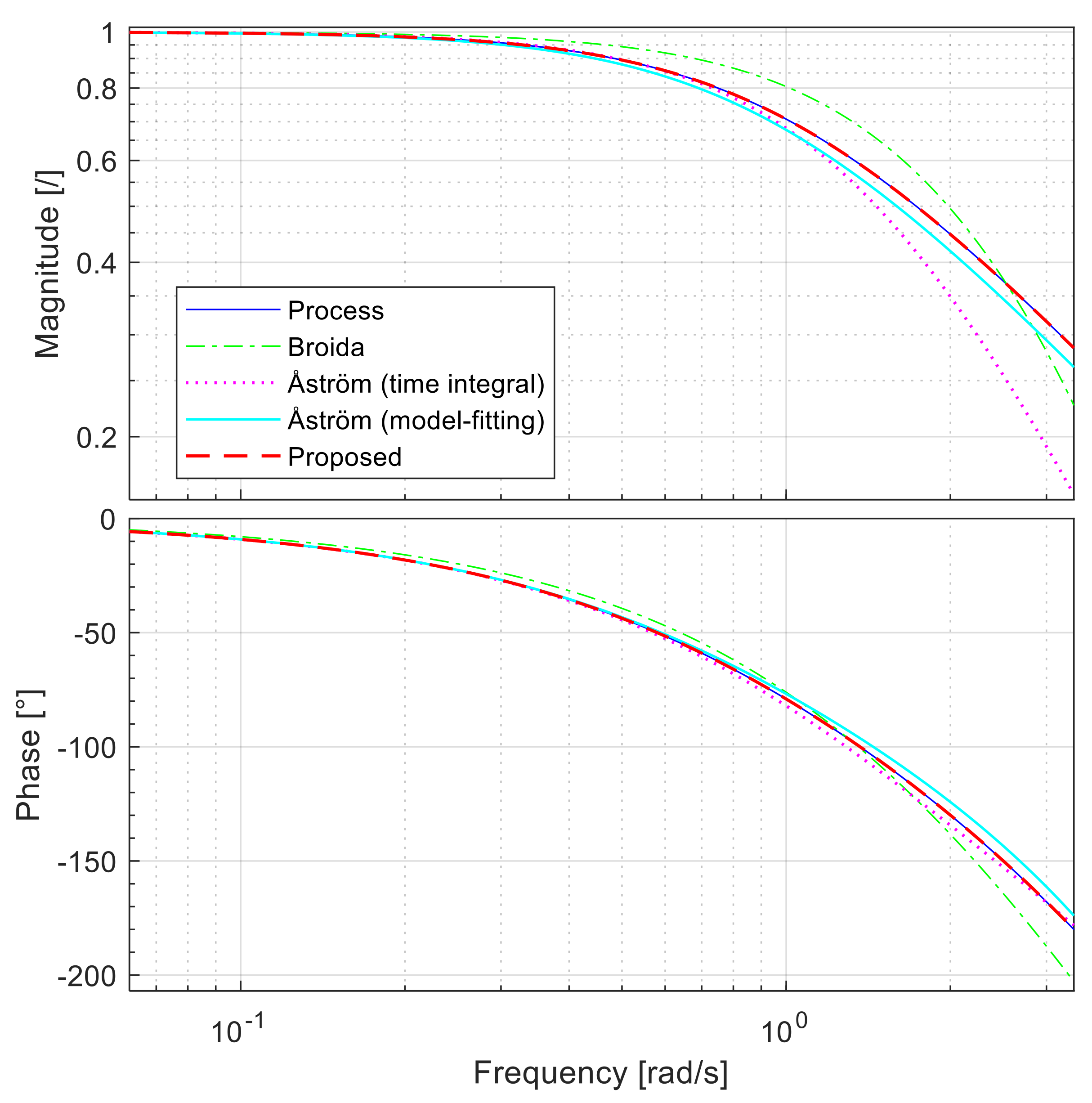
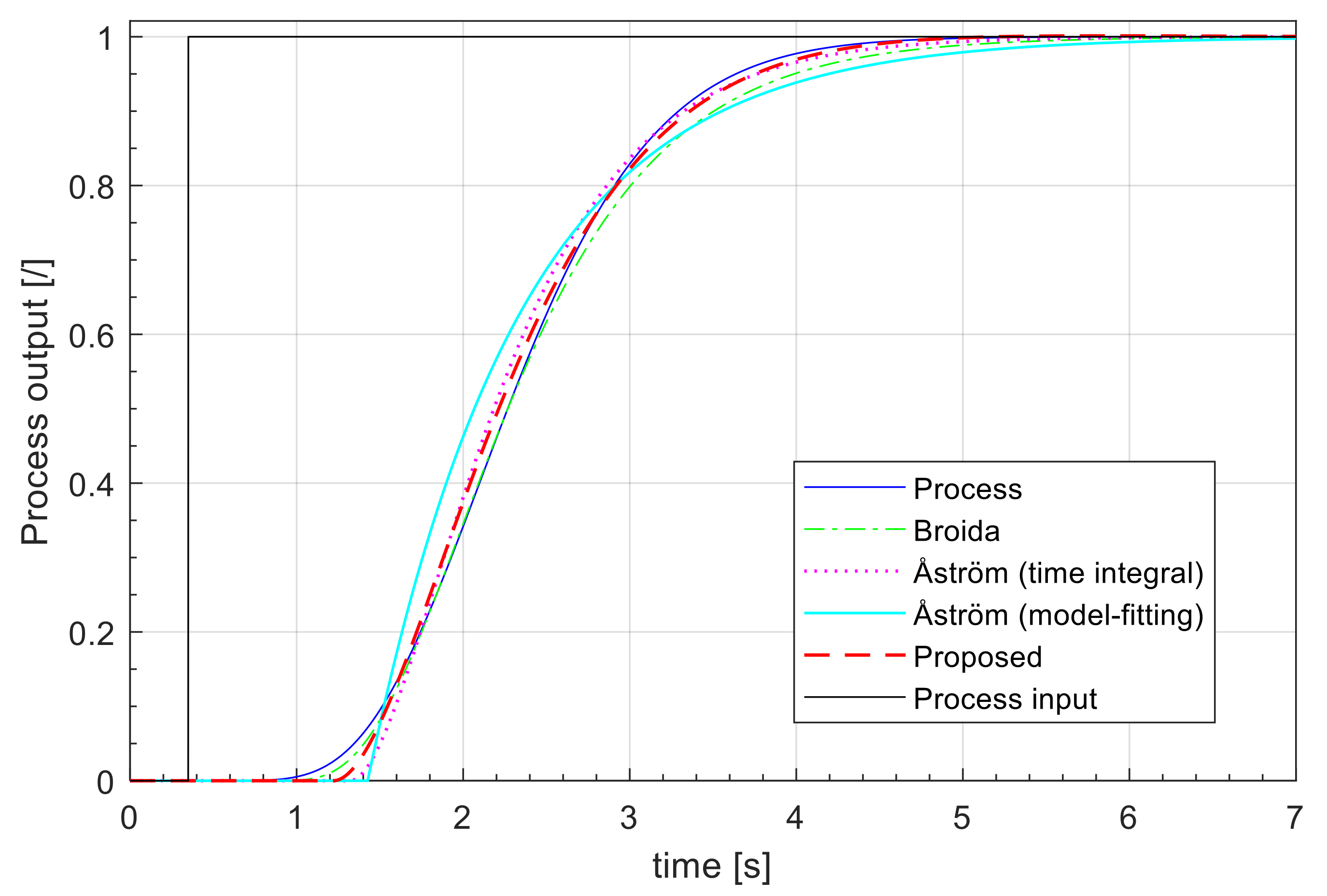
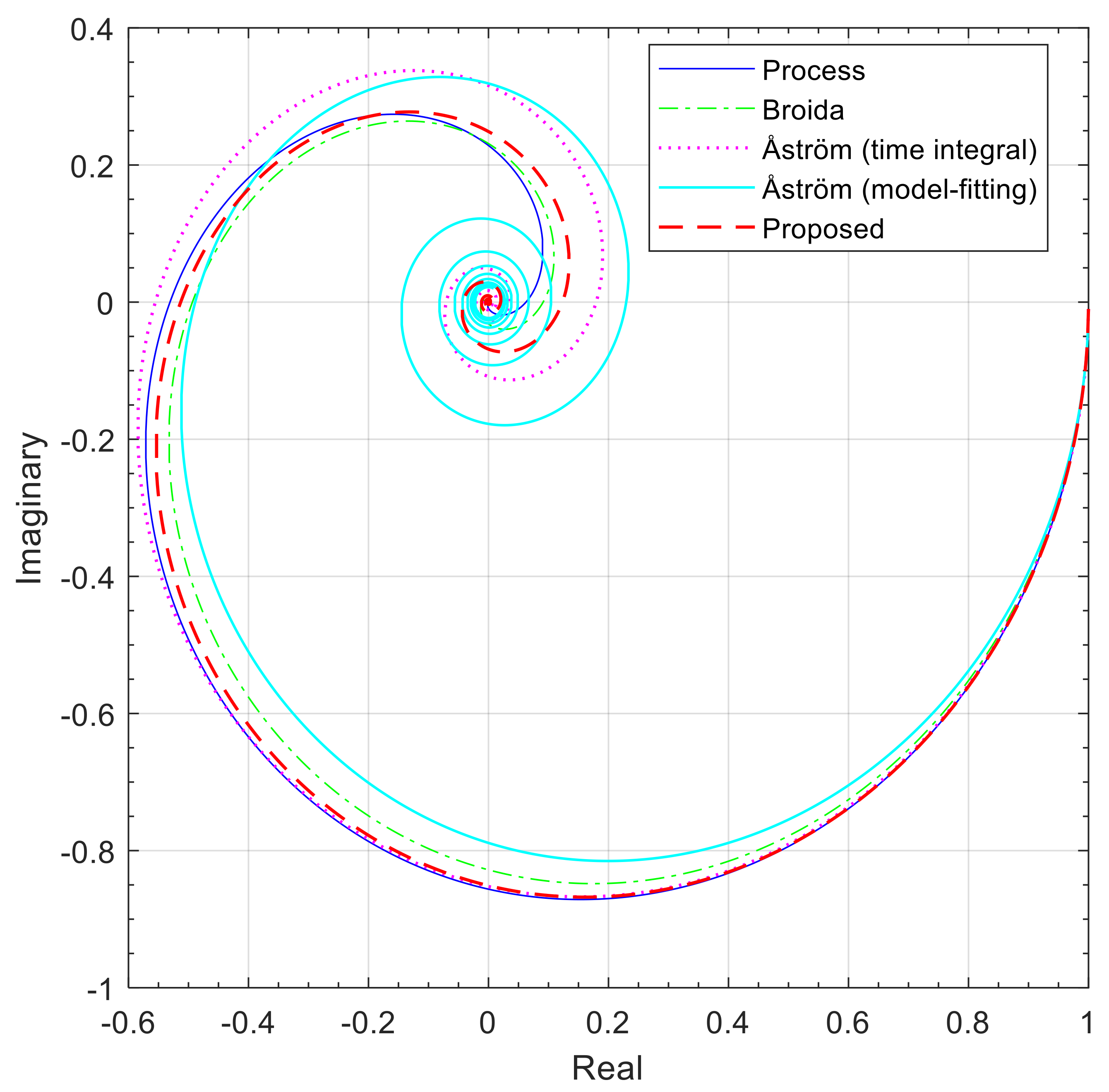
Figure 10,
Figure 11 and
Figure 12 compare the step responses for
u = 1, Bode, and Nyquist plots on the aforementioned identification methods. The criteria values are given in
Table 5. Note that for the calculation of the criterion ERR, ω
0 = 5 × 10
–3 and ω
C = 1.6569 rad/s.
The figures show that the proposed identification method gives an excellent approximation of the process at low frequencies. At higher frequencies, some smaller deviation can be observed. Nevertheless, the proposed method achieves the lowest criteria values in the time- and frequency-domain. The second was Åström (time integral) in the frequency-domain and Broida method in the time-domain.
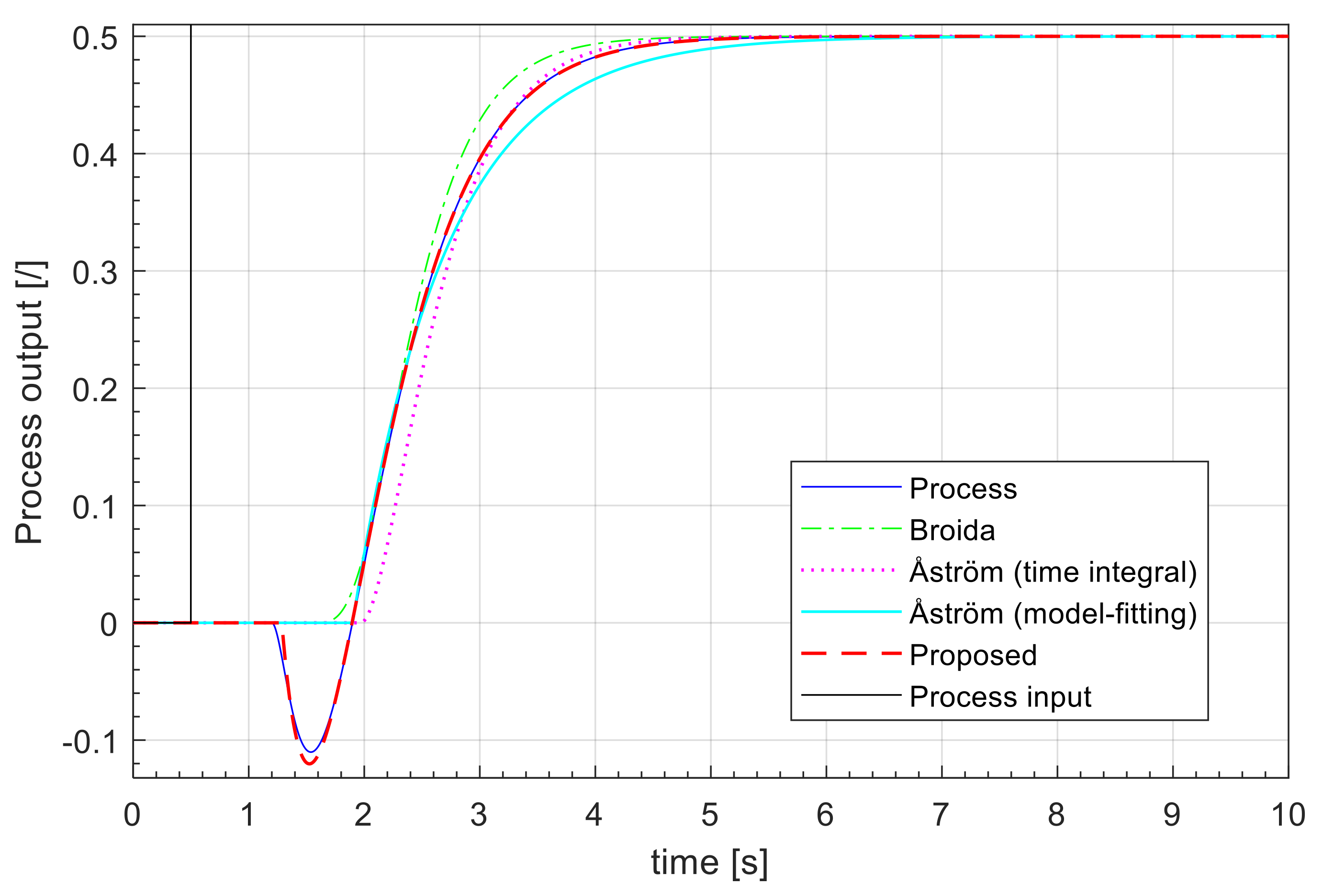
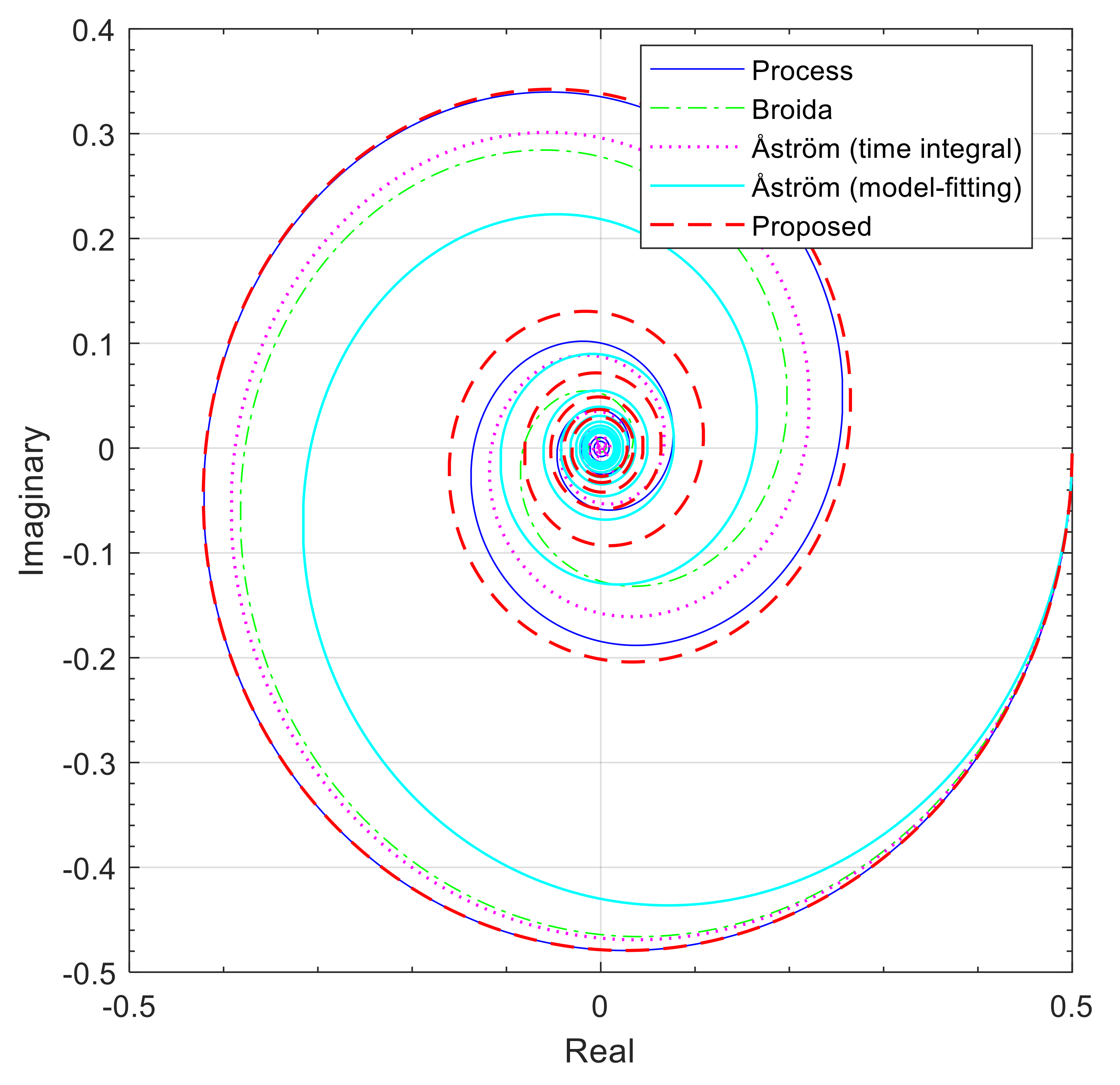
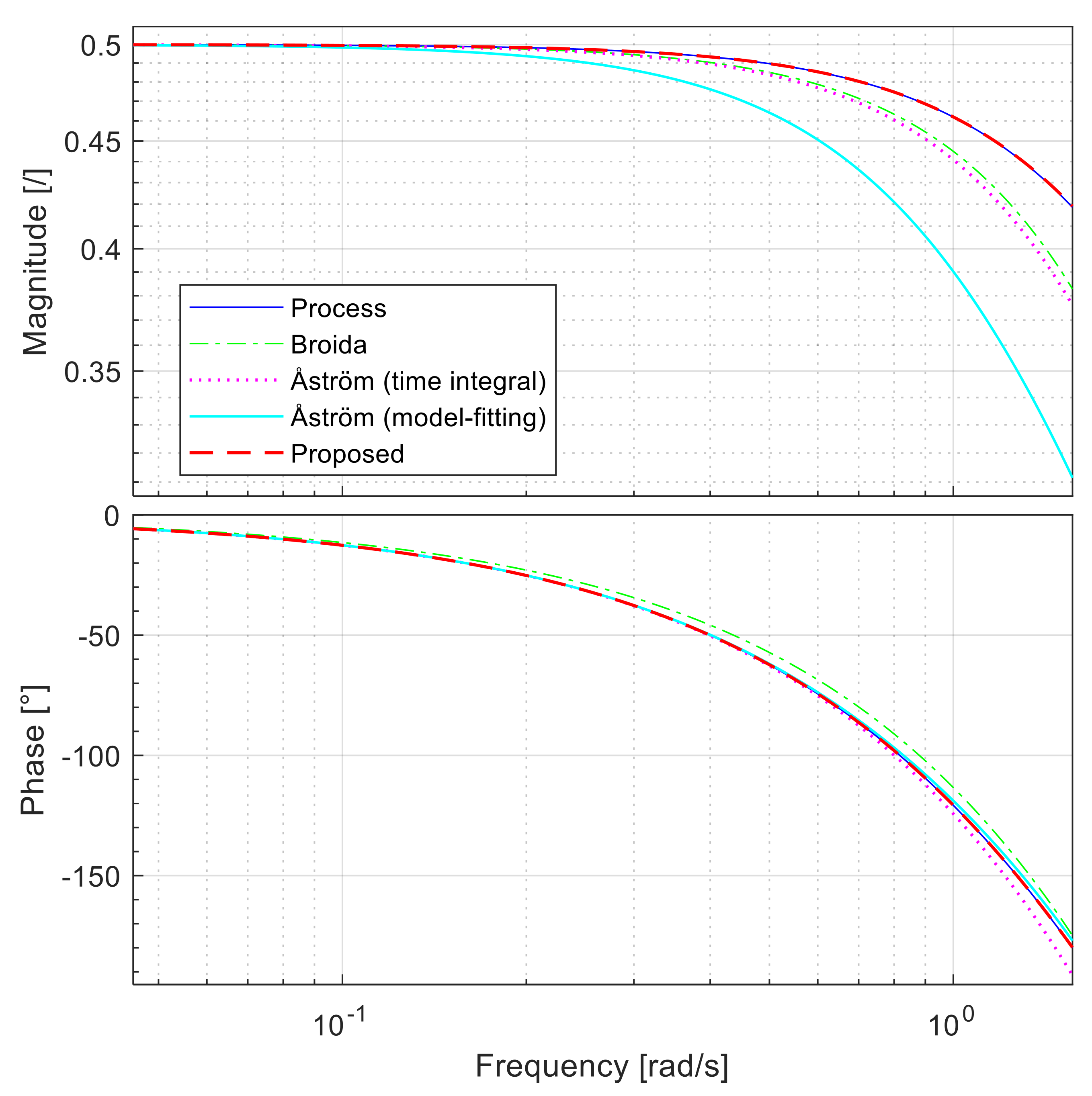
Case 3
The Broida method, two Åströms methods, and the proposed method were tested on a third-order process with zero plus time delay. This process was described in [
47,
48,
49]. The estimated model parameters for the process
GP3 are given in
Table 6.
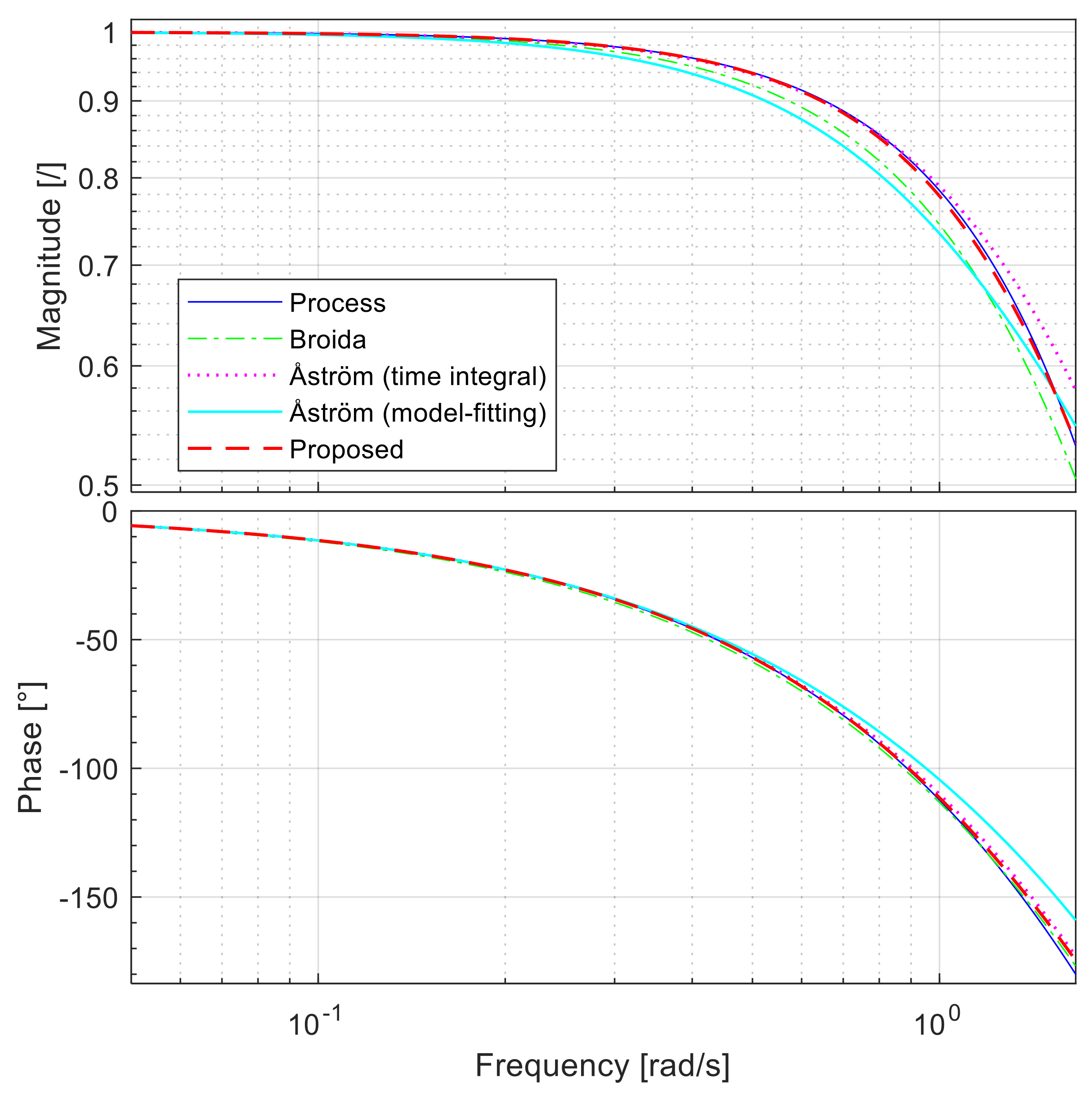
Figure 13,
Figure 14 and
Figure 15 compare the step responses for
u = 1, Bode, and Nyquist plots on the aforementioned identification methods. The criteria values are given in
Table 7. Note that for the calculation of the criterion ERR, ω
0 = 4.55 × 10
–3 and ω
C = 1.567 rad/s.
The figures show that the model, obtained by the proposed identification method, provides an excellent approximation of the process in a wide frequency range. At very high frequencies (Nyquist plot), some deviation can be seen. From
Figure 13, it can be seen that the proposed method also provides a good approximation in the time-domain. This is confirmed by the lowest criteria in the time- and the frequency-domain. The Åström method (time integral) was ranked second in the frequency-domain, and the Broida method was ranked second in the time-domain.
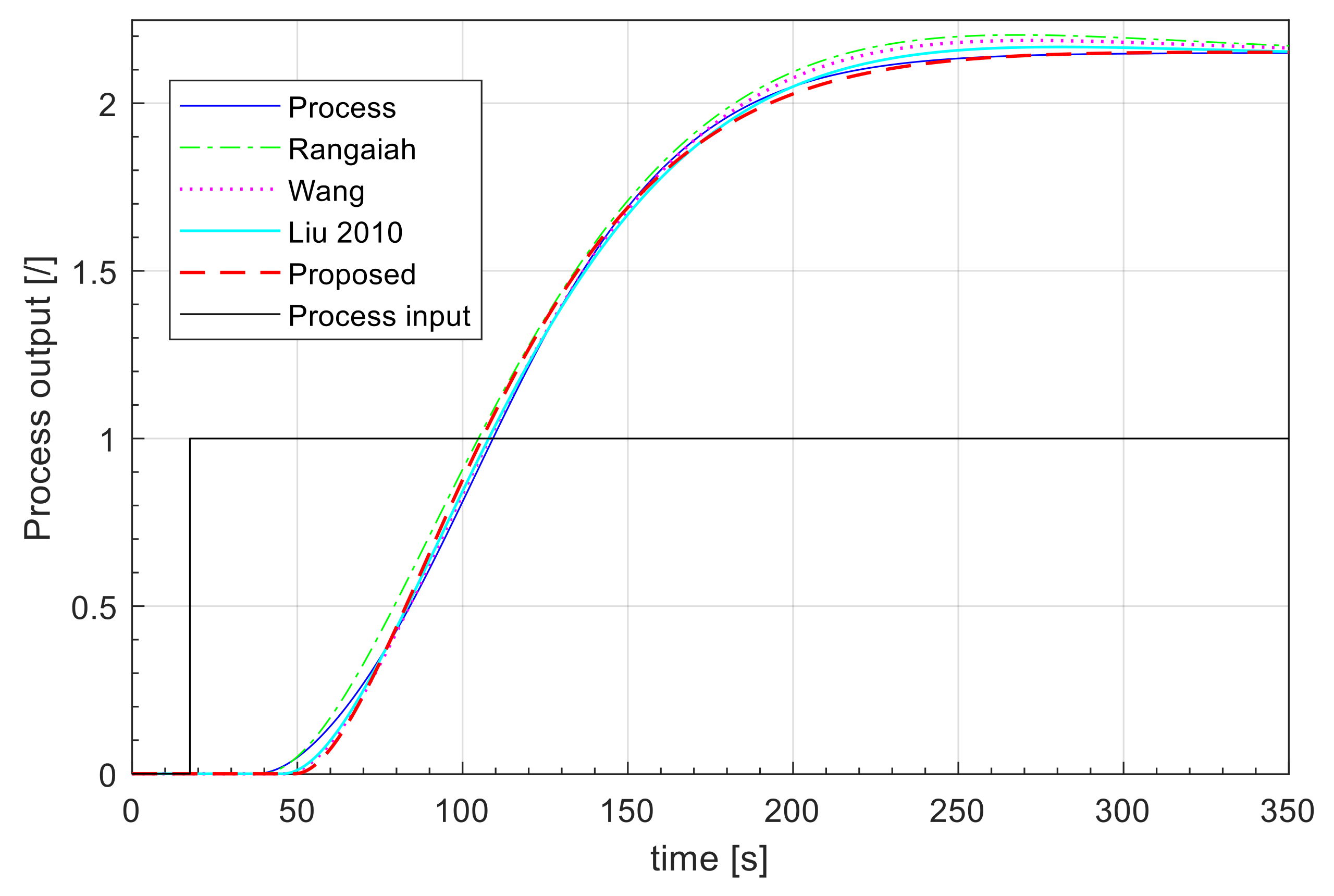
Case 4
The process
GP4 (higher-order process with a higher-order numerator and time delay) was compared with the three-step identification methods [
25,
31,
50]. The first one is the method of Rangaiah and Krishnaswamy [
31], hereafter referred to as Rangaiah. The method for estimating the model uses three-point fitting. The estimated model parameters for process
GP4 in this method are published in [
7]. The second method is the method of Wang and Zhang [
50], hereafter referred to as Wang. The method for estimating the model uses a time integral approach. The third method is the method of Liu and Gao [
25], hereafter referred to as Liu 2010. The method for estimating the model uses a frequency response fitting. All the methods presented provide the second-order model with time delay (8). The estimated model parameters for all presented and proposed methods for process
GP4 are given in
Table 8.
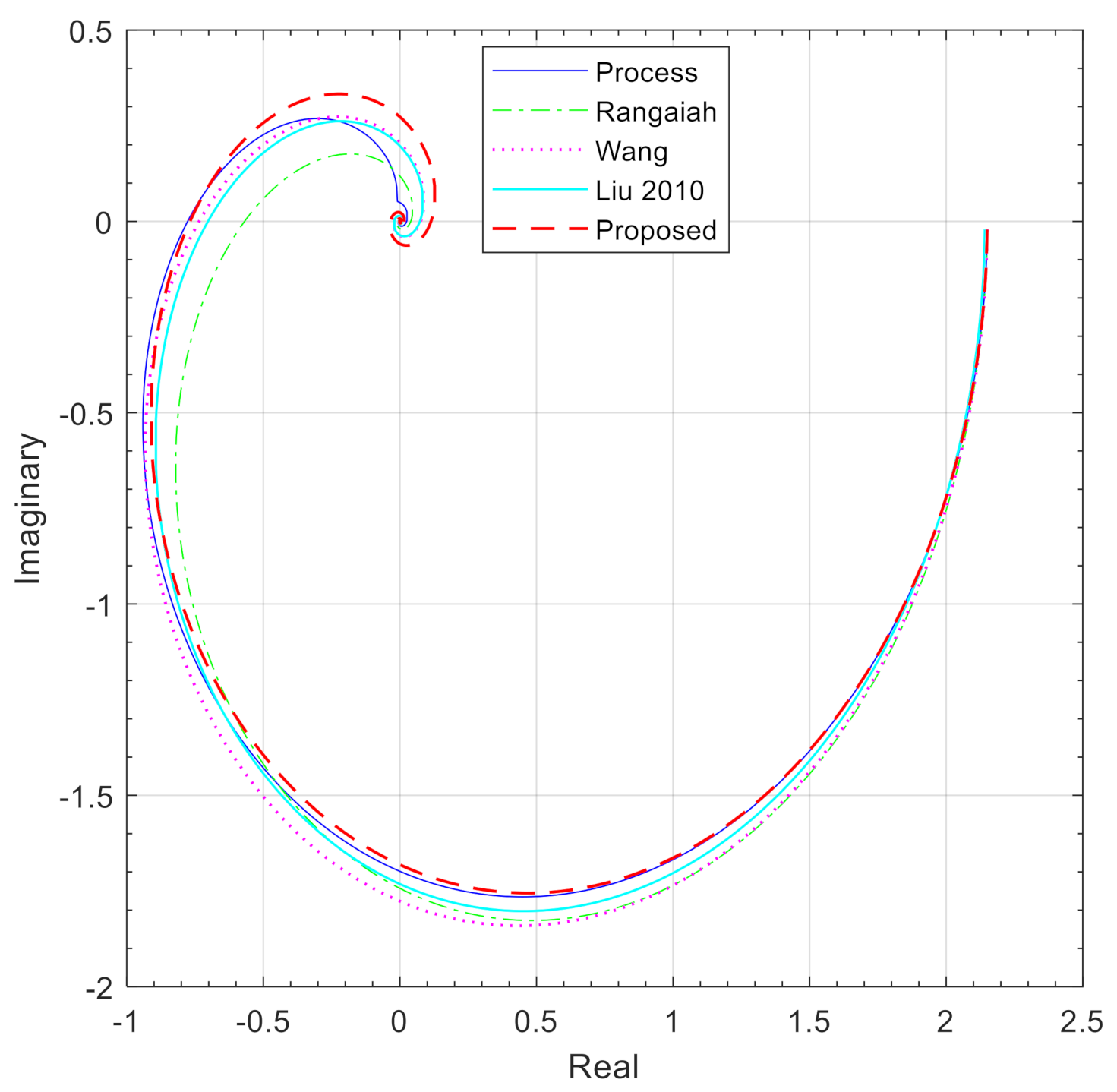
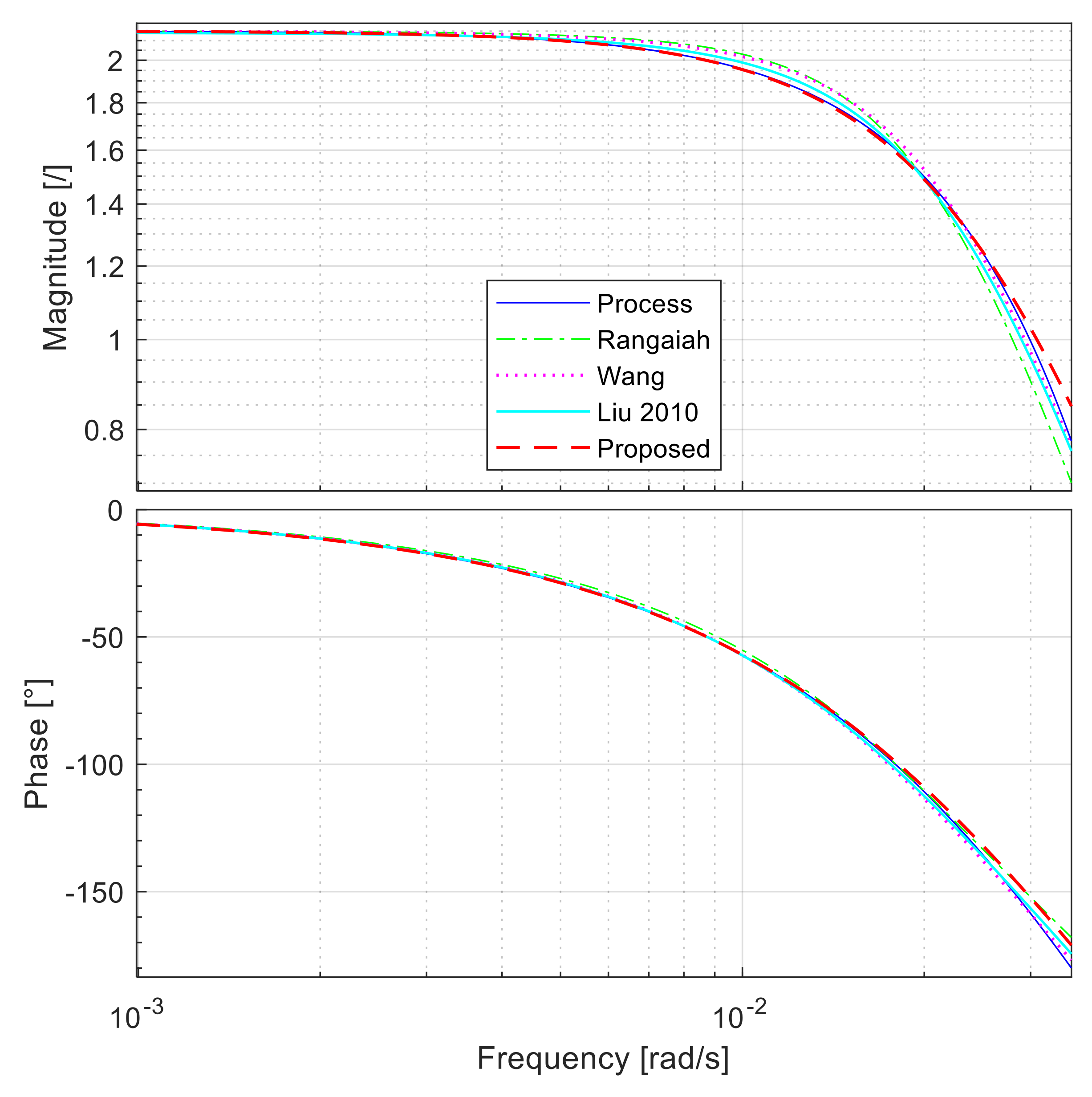
Figure 16,
Figure 17 and
Figure 18 compare the step responses for
u = 1, Bode, and Nyquist plots between the aforementioned identification methods. The criteria values are given in
Table 9. For the calculation of the criterion ERR, ω
0 = 9.931 × 10
–5 and ω
C = 3.505 × 10
–2 rad/s.
The figures show that the proposed identification method gives an excellent approximation of the process at low frequencies, while some deviations can be seen at higher frequencies. Nevertheless, the proposed method obtained the lowest criterion values in the time- and frequency-domain. The Liu 2010 method was ranked second in the frequency-domain, and the Wang method was ranked second in the time-domain.
Case 5
The process
GP5 (second-order process with time delay) was compared with the three relay identification methods [
51,
52,
53]. The first is the describing function approach of Li et al. [
51], hereafter referred to as Li. The second is the method of Liu et al. [
52], hereafter referred to as Liu 2008. The Liu method for estimating the model uses a curve-fitting approach. The third is the method of Ramakrishnan and Chidambaram [
53], hereafter referred to as Ramakrishnan. The method for estimating the model uses frequency response fitting. All the methods presented provide the second-order model with time delay (8). The estimated model parameters for all presented and proposed methods for process
GP5 are given in
Table 10.
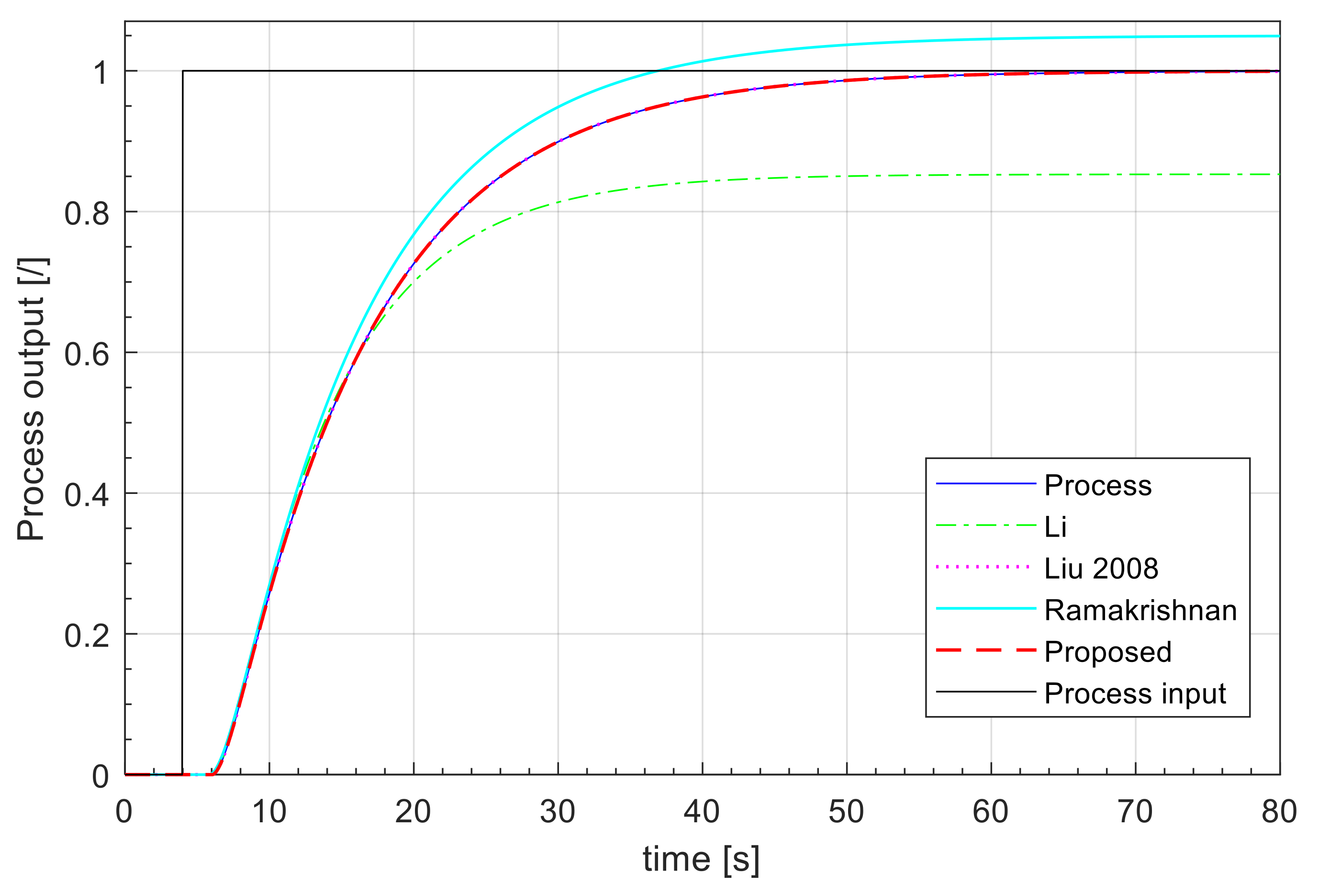
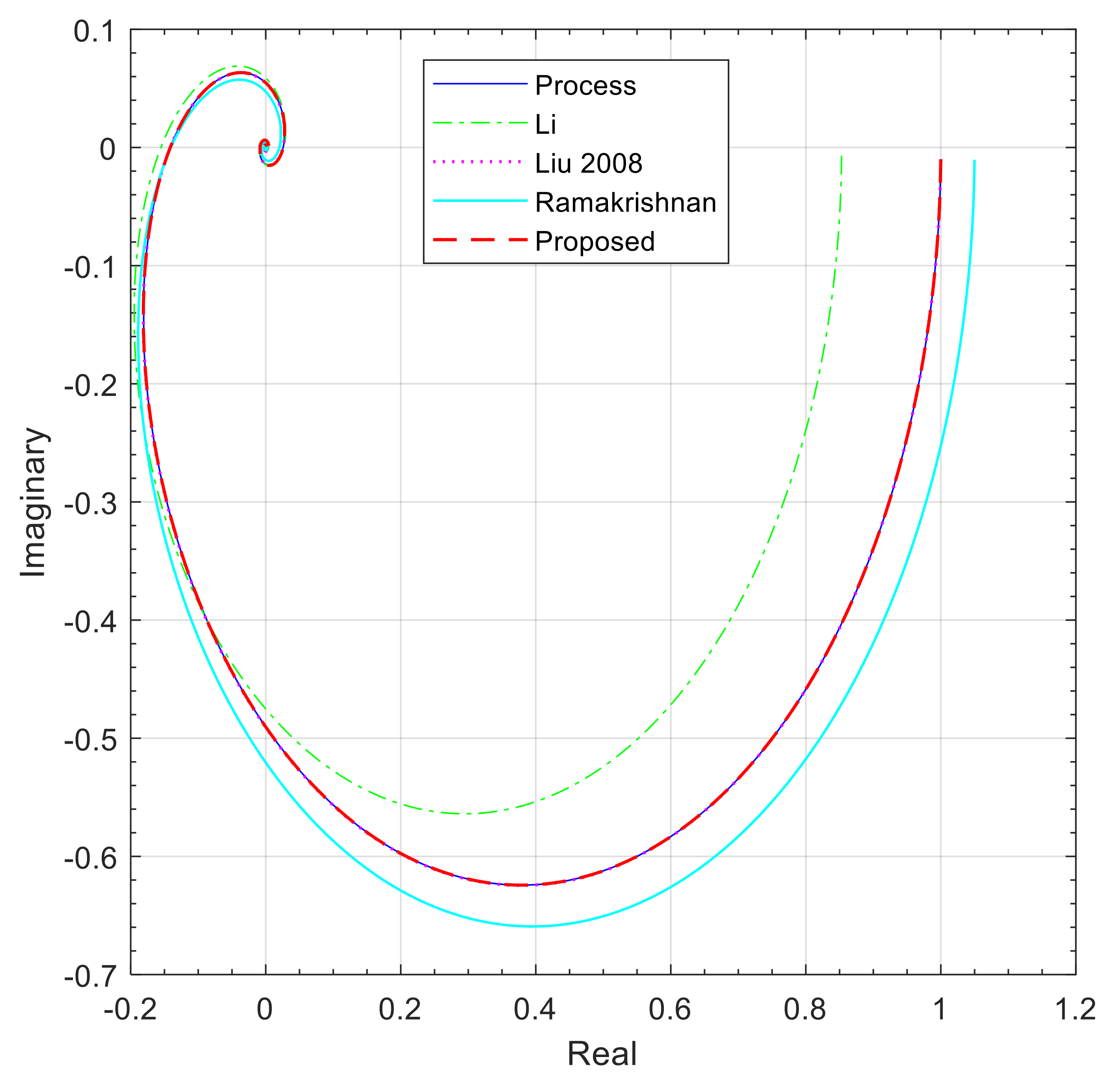
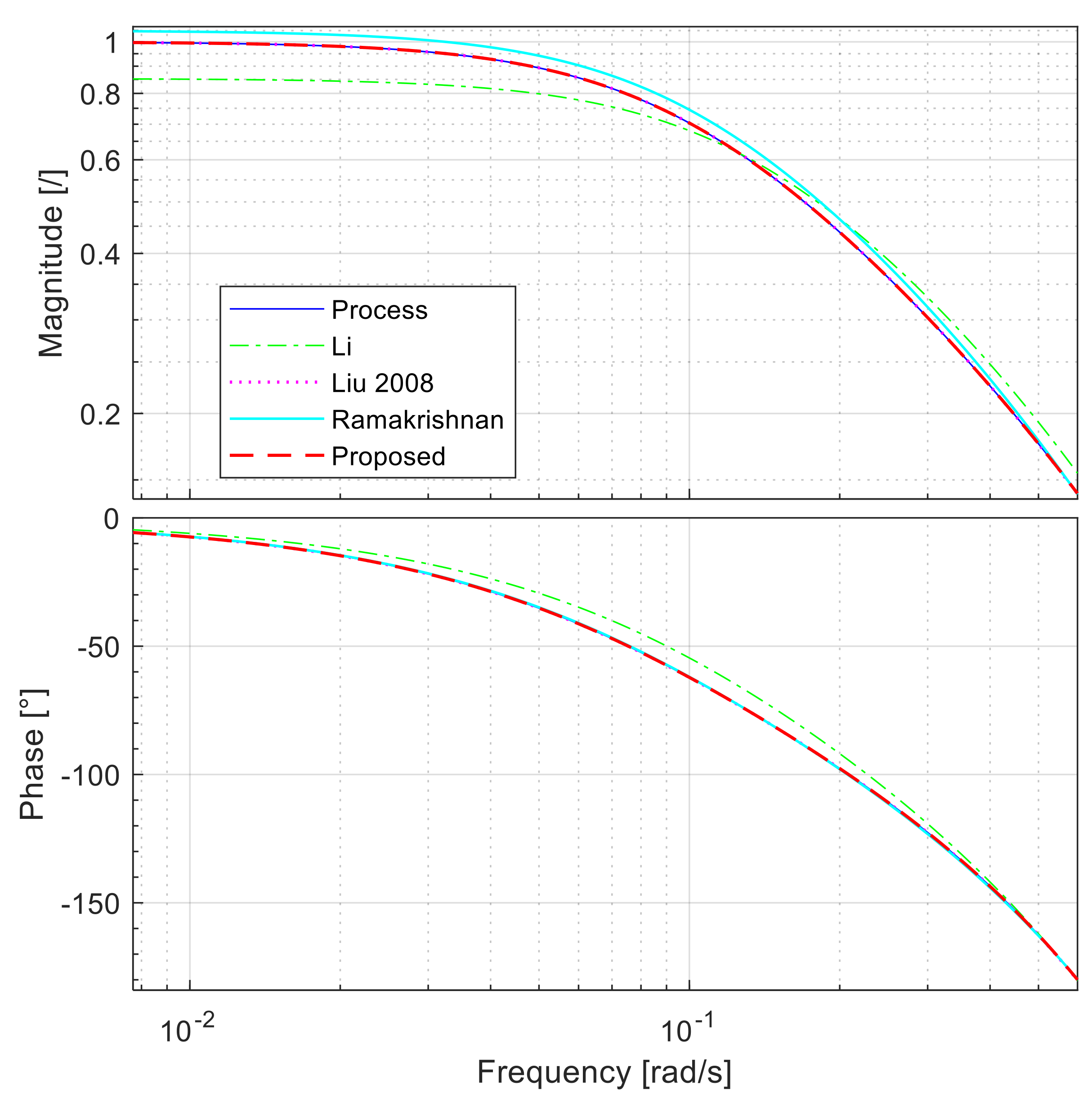
Figure 19,
Figure 20 and
Figure 21 compare the step responses for
u = 1, Bode, and Nyquist plots between the aforementioned identification methods. The criteria values are given in
Table 11. The criterion ERR is calculated in the frequency region from ω
0 = 7.692 × 10
–4 to ω
C = 0.599 rad/s.
The figures again show that the proposed identification method gives an excellent approximation of the process in the whole frequency range. This is confirmed by the lowest criteria in the time- and the frequency-domain. The Liu 2008 method was ranked second.
Case 6
The process
GP6 (higher-order non-minimum phase process with time delay) was compared with the three relay identification methods [
18,
22,
54]. The first one is the describing function approach of Shen et al. [
22], hereafter referred to as Shen. The estimated model parameters for process
GP6 for this method are published in [
7]. The second is the method of Kaya and Atherton [
18], hereafter referred to as Kaya. The method for estimating the model uses a curve-fitting approach. The third is the method of Liu and Gao [
54], hereafter referred to as Liu 2009. The method for model estimation uses a frequency response fitting. All the methods presented provide the second-order model with time delay (8). The estimated model parameters for all the methods for process
GP6 are given in
Table 12.
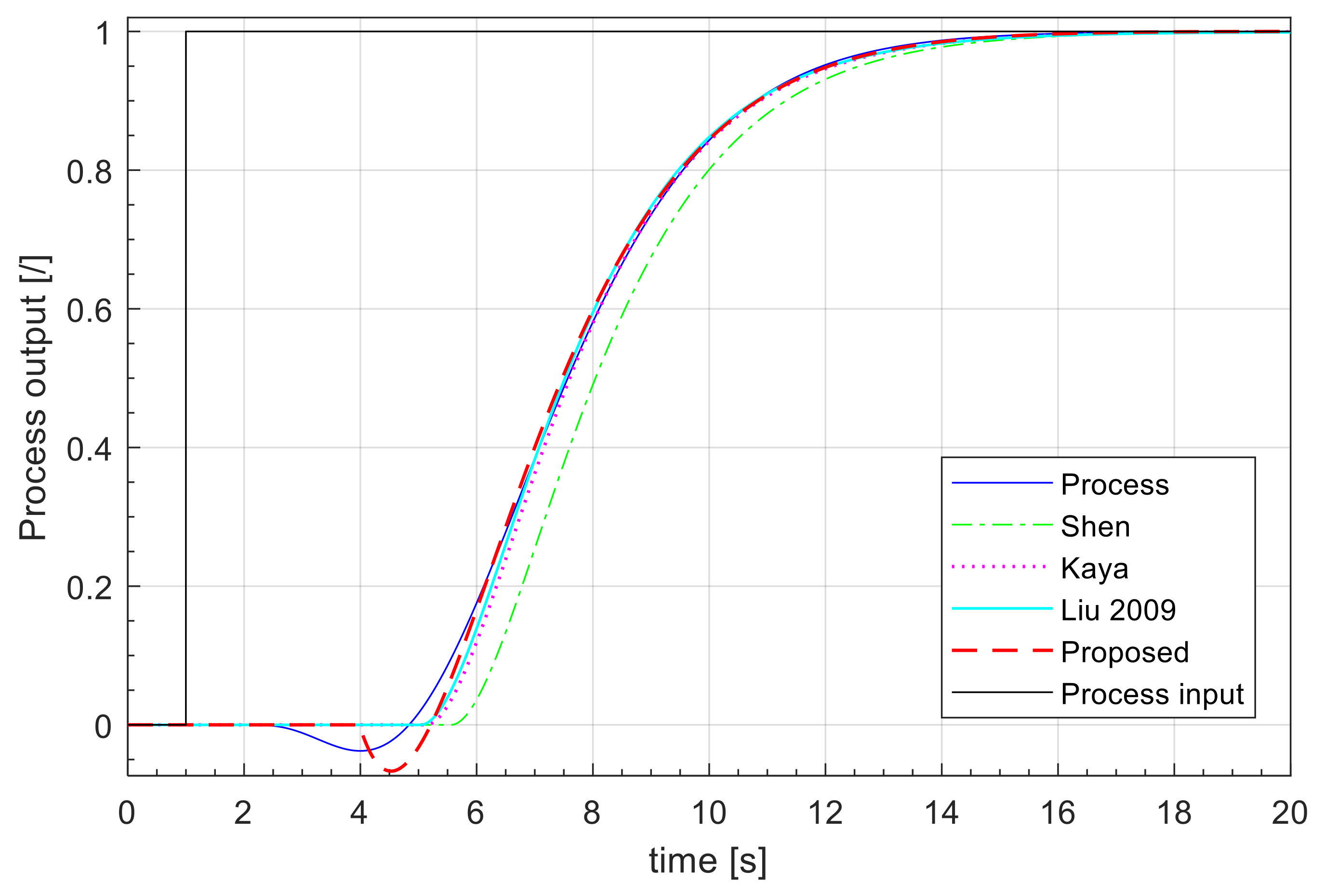
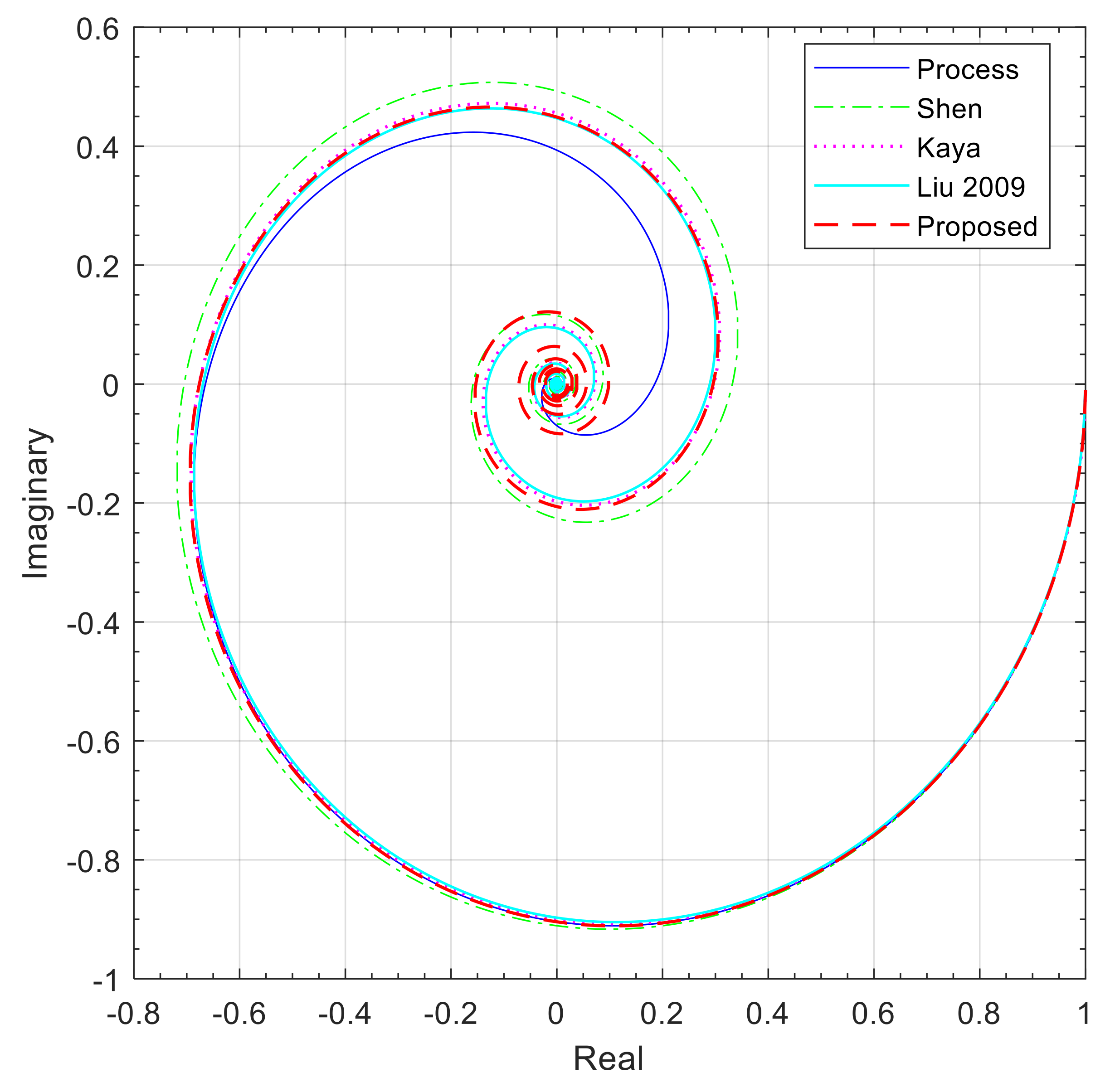
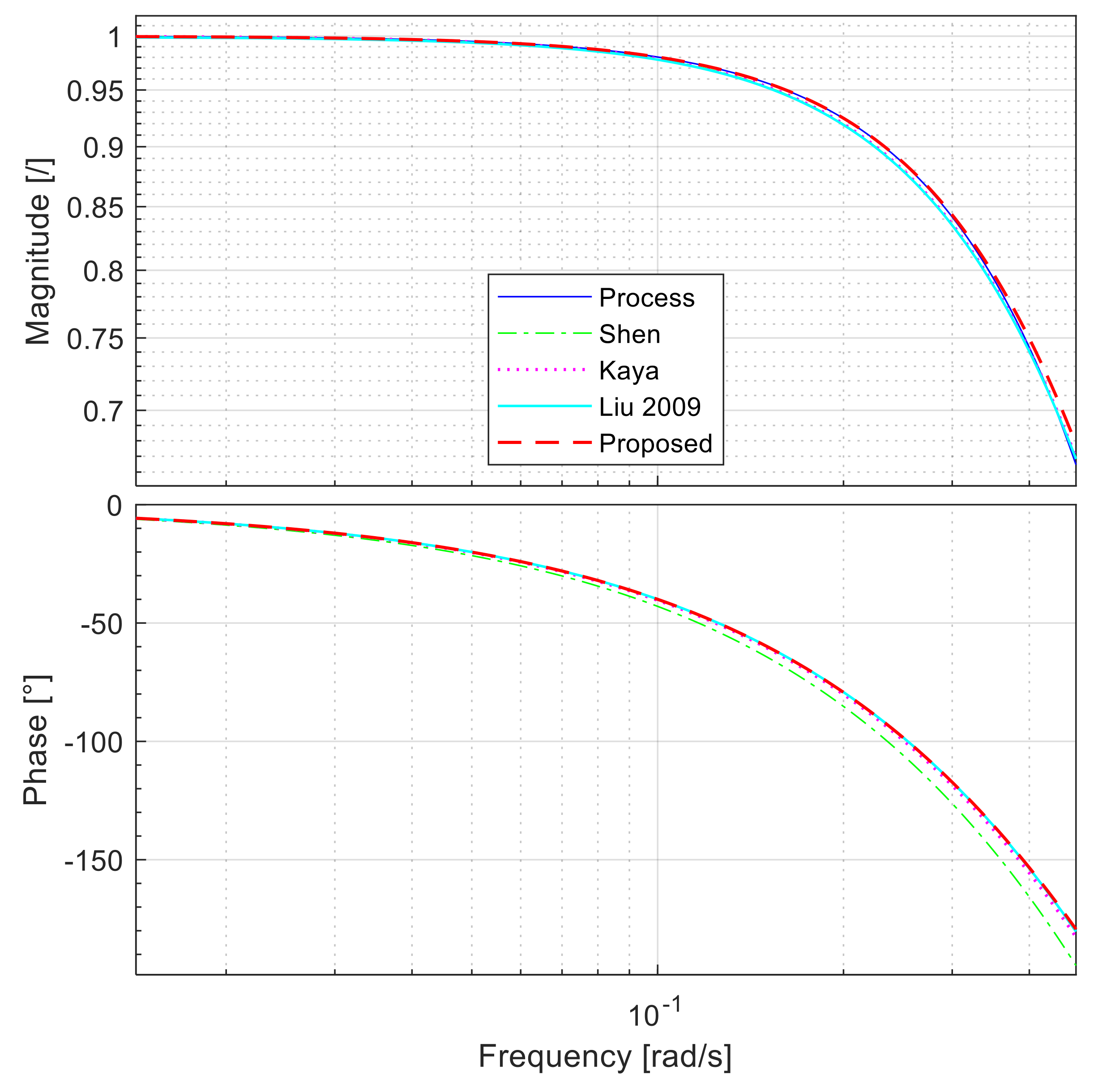
Figure 22,
Figure 23 and
Figure 24 compare the step responses for
u = 1, Bode, and Nyquist plots between the aforementioned identification methods. The criteria values are given in
Table 13. The criterion ERR is calculated in the frequency region between ω
0 = 1.429 × 10
–3 and ω
C = 0.476 rad/s.
The figures show that the proposed identification method gives an excellent approximation of the process at low frequencies. At higher frequencies, some deviation can be seen. Nevertheless, the proposed method obtained the lowest criterion values in the time- and frequency-domain. The Liu 2009 method was ranked second in the frequency-domain, and the Kaya method was ranked second in the time-domain.
Case 7
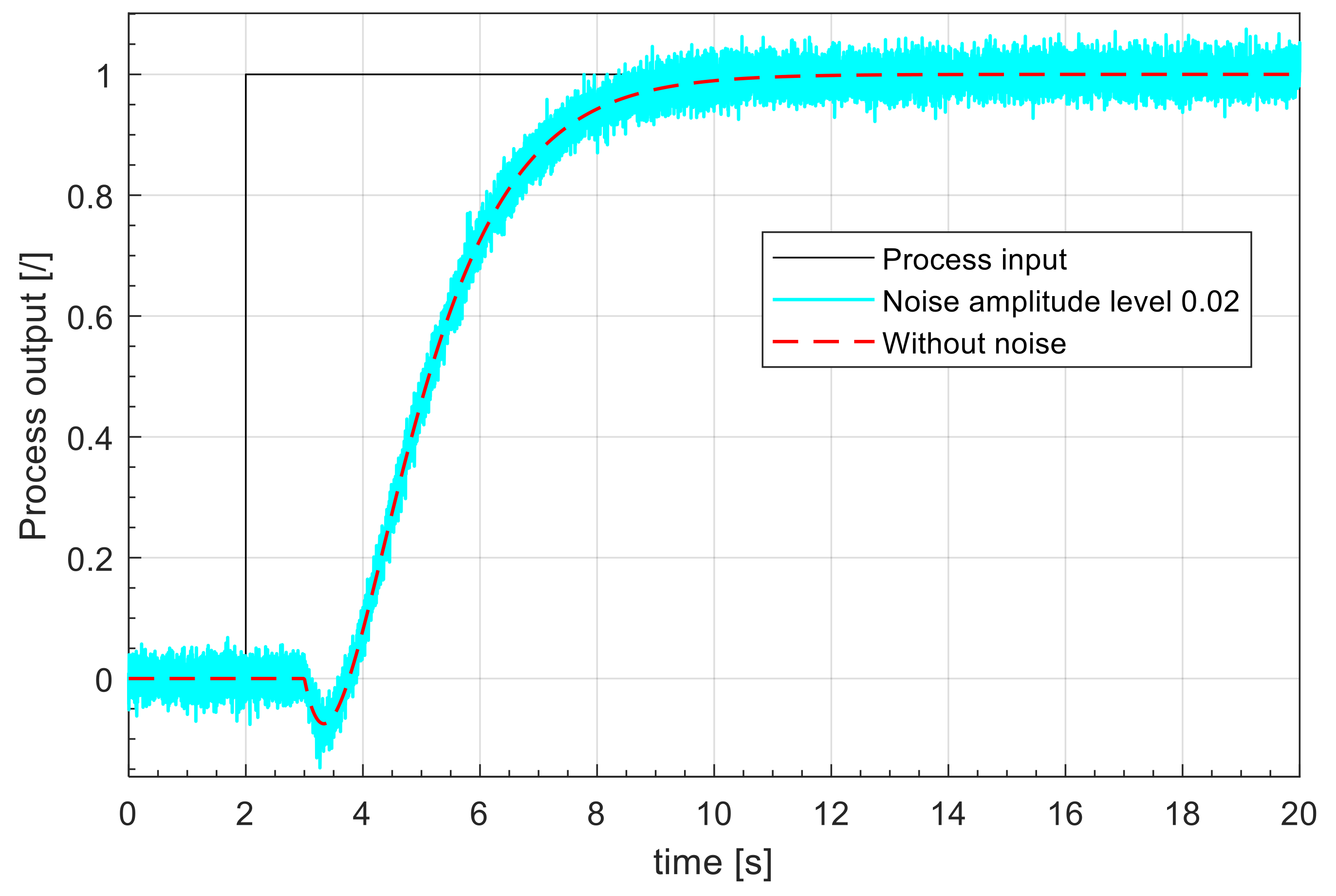
The process GP7 is the second-order non-minimum phase process with time delay. Here, the sensitivity to the process noise was tested, rather than comparison to other methods.
The test was performed as follows. First, we obtained 200 step responses of the process, where a random white noise signal with power 1 multiplied by gain 2 × 10
−2 was added as measurement noise to the process output. The typical step response of the process with noise is shown in
Figure 25. The initial steady-state of the process was calculated by averaging the process signals between
t = 0 s and
t = 2 s, whereas the final steady-state was obtained from the average signal in the interval between
t = 17 s and
t = 20 s. Multiple integrations of the process input and output signals were performed between
t = 2 s and
t = 15 s.
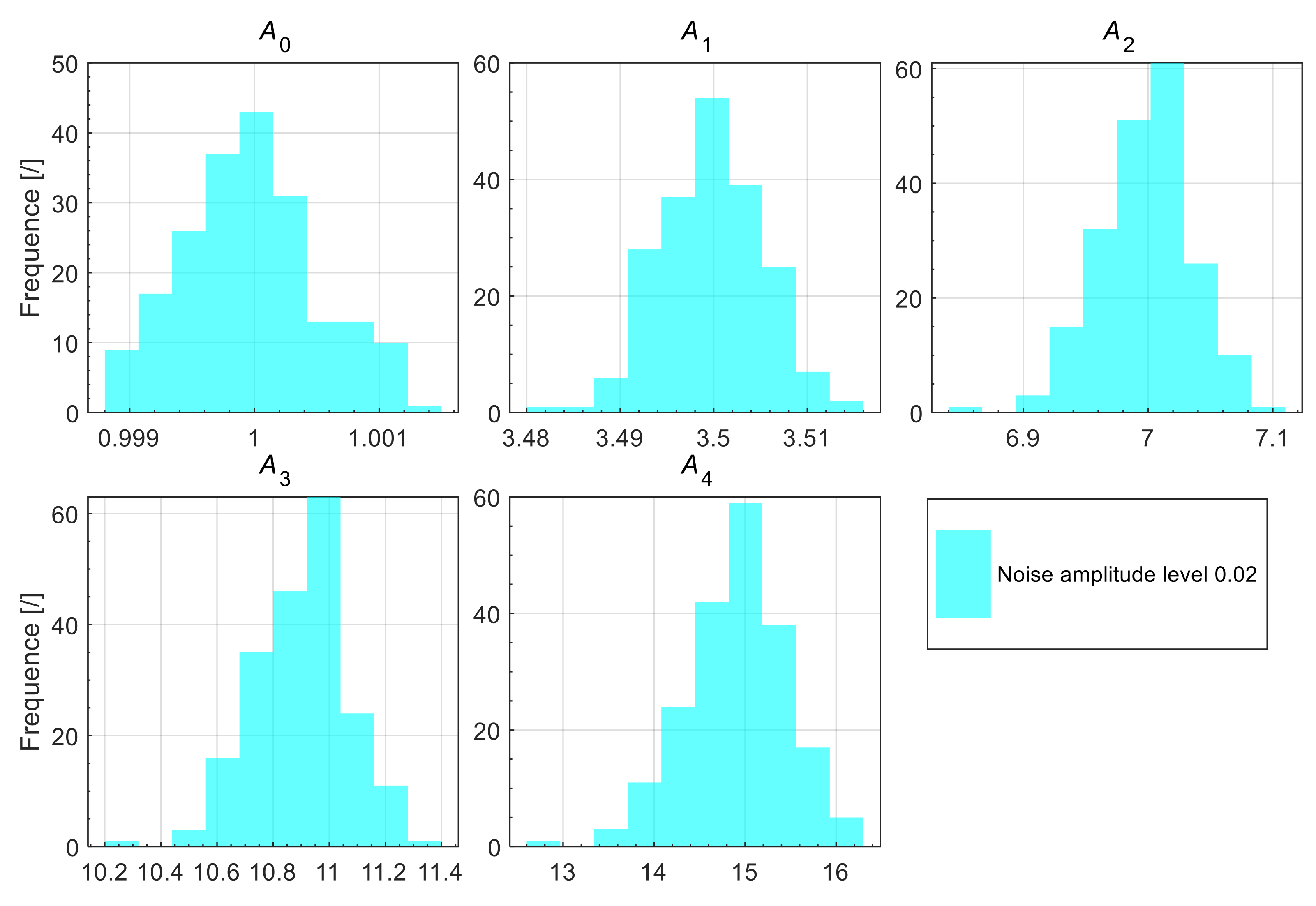
Note that to reduce numerical error, the process input and output signals for all 200 responses were filtered using a second-order filter, defined by the next transfer function before multiple integrations were performed:
Then, characteristic areas were calculated for all responses. The histograms of the calculated areas are shown in
Figure 26.
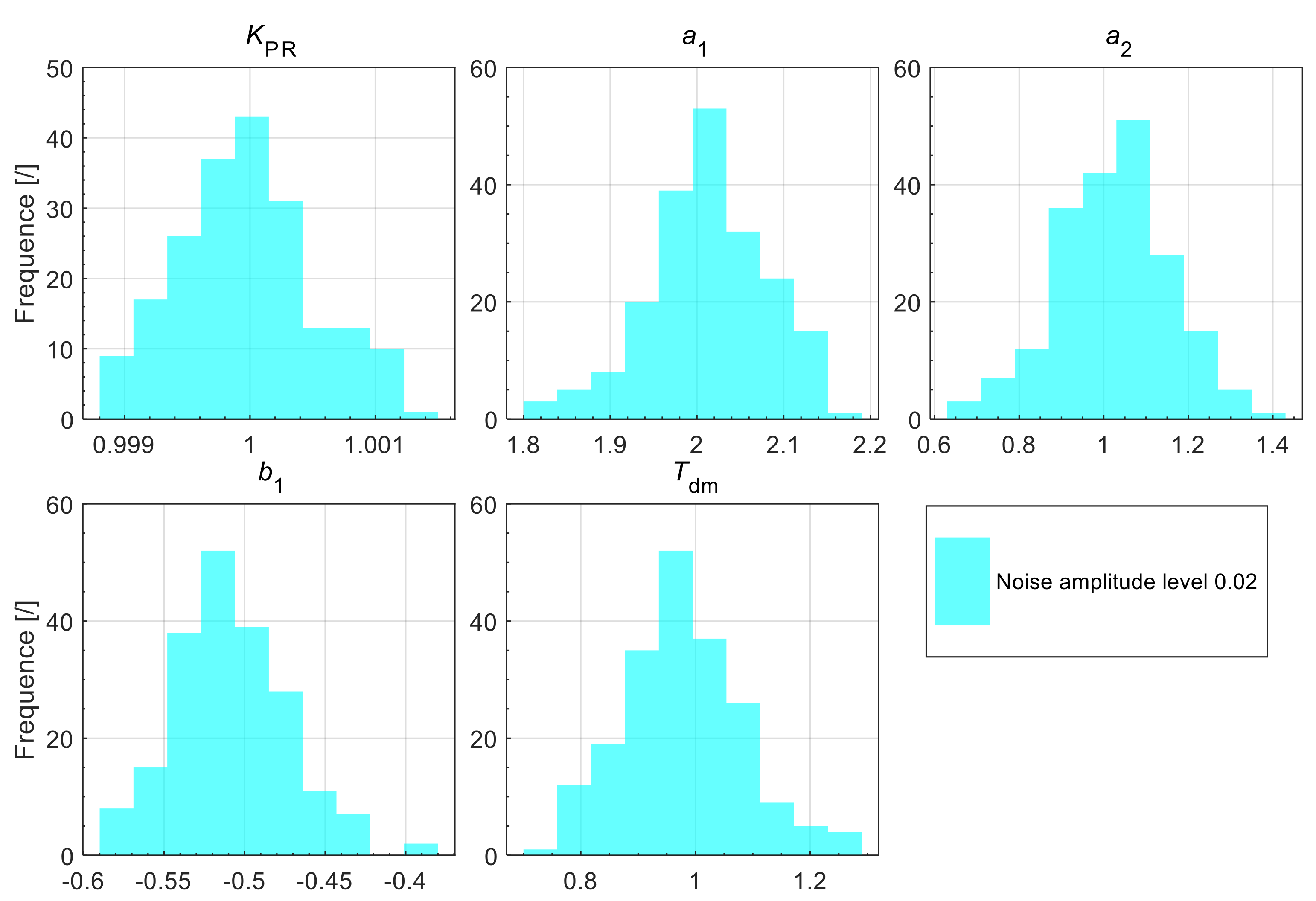
As can be seen, the dispersion of the calculated areas is not that significant, even with a relatively high noise amplification. The obtained surfaces were then used to calculate the process model parameters. The histograms of the parameters are shown in
Figure 27.
As can be seen from
Figure 27, the dispersion of the process parameters is not large.
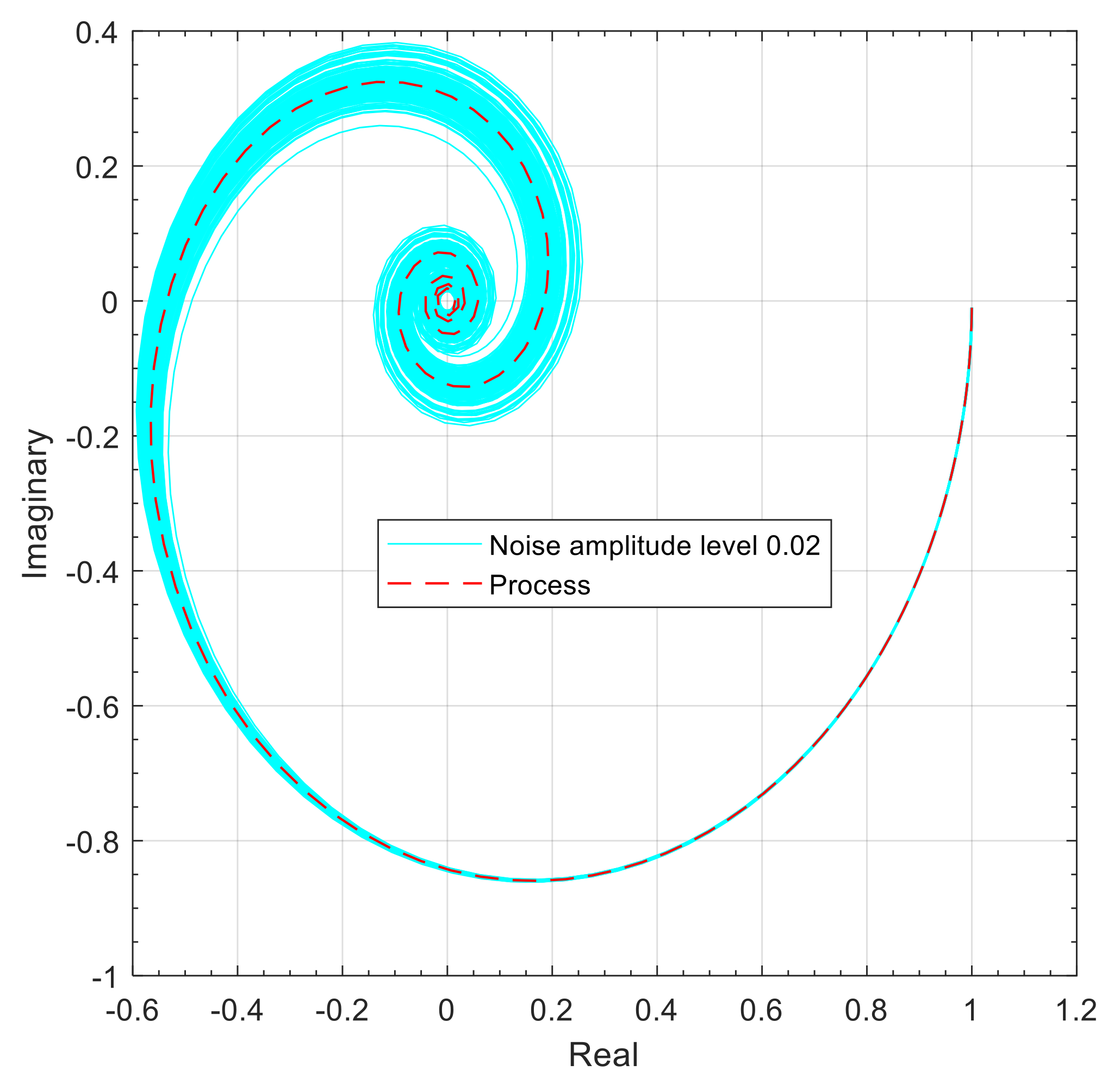
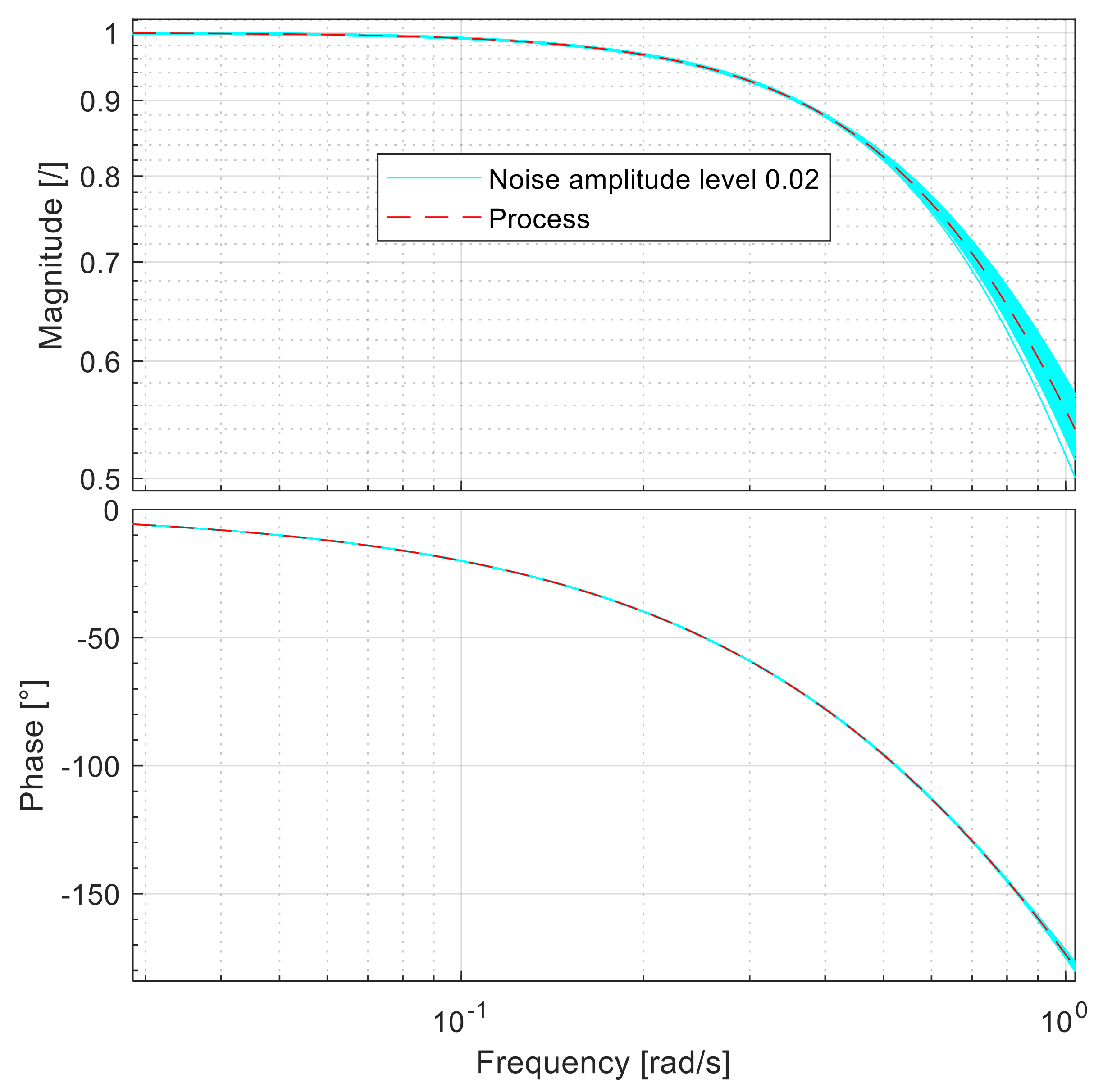
The quality of the obtained models is shown in
Figure 28 and
Figure 29.
Figure 28 shows the Nyquist plot for the computed process models compared to the original process (dashed red line). It can be seen that the calculated process models are very close to the actual process model, especially at lower frequencies. A similar conclusion can be drawn from the Bode plot (
Figure 29), where it can be seen that the calculated process models are very close to the actual process model.
The results indicate that the proposed method can be used, even in the presence of moderate process noise.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}