1. Introduction
Soft robotics has been gaining importance in the robotics research field. The intrinsic compliance and adaptable properties of this hardware are pushing them into many areas. The purpose of these technologies is to overcome some of the problems found in the current robotic platforms. These include weight, cost, versatility and more importantly, safe human-to-robot interaction.
Different soft robotics technologies have emerged. These include pneumatic muscles with rigid links [
1], pneumatic materials that deform according to their strain field [
2], robots with fully inflatable links [
3], fully inflatable robots [
4], plant-based structures [
5] and many other technologies [
6,
7]. In particular, we are interested in tendon-driven soft robots, a bio-inspired model scheme, as those in [
8,
9,
10]. However, the kinematic models, unlike rigid ones, are not yet well-understood. Given the high non-linearity and physical characteristics, several assumptions and numeric simplifications are considered to actuate. Therefore, they are not as reliable and have lower versatility in comparison with their counterpart, thus limiting their impact on robotics [
11]. These drawbacks are stopping soft robotics to enter fields such as industrial robotics or manufacturing. However, where precision is not mandatory or humans might apply proper correction to achieve the desired goal, they have found a niche [
12,
13], such as rehabilitation and prosthetics.
In [
8], the authors developed a mathematical model for the tendon-driven robotic arm. In particular, the authors approximated the elasticity of the tendons as a mass-less spring, given that their mass is many times smaller than the other parts (motors, gears, and loads). This enables them, on one side, to neglect coupling effects over different links, and also to assume rigid motions of the particular link to be modeled. Notice that even though the motion of the tendons is aligned with the arm motion, obtaining such a model is troublesome and requires further developments to increase the accuracy of the final result. To overcome the modeling problem for control purposes, the authors in [
10] used reinforcement-learning to control the tendon-driven ACT hand synergies. This robotic hand has 24 motor-driven tendons that mimic the human hand biomechanics. Therefore, dynamic interaction with the hand skeleton results in redundant motions and other non-linear characteristics of the hardware that should be considered if a mathematical model is required. By using reinforcement learning, the authors are able to capture the desired dynamics over a set of motions that derive into a control strategy over the 24 tendons in a reduced state-space. However, as pointed out by [
9], data-driven control algorithms on tendon-based robots or soft robotics have not yet been explored, and model-based control strategies are still preferred. Considering the previous statement, the authors in [
9] analyzed an autonomous learning algorithm to obtain the model of a tendon-driven leg when different stiffness is used.
From the modeling perspective, [
14] proposed a finite element model (FEM) for a glove with pneumatic bending actuators. The authors worked in a two-dimensional space, neglecting the dynamic energy from the model. In further research, a black-box model identification was given by [
15] for a fluidic actuator. This allows the authors to introduce the shear deformation into the model, which in their previous work was not considered. The maximum parametric variations reached 36%, which was compensated by a back-stepping controller. In the present paper, black-box data-driven modeling will be used. Therefore, the overall dynamics of the given neck will be considered and modeling results will be compared with standard linear and non-linear modeling techniques, that is, Recursive Least Square and Neural Networks. This provides an overview of alternative modeling possibilities and their implications over a non-linear system as the tendon-driven neck.
In [
16], a geometrical model and a two-dimensional FEM model for a soft fluidic actuator were studied. The geometrical model considered a uniform bending curvature of the link, while the FEM model showed a linear trend on the link behaviour. A new approach was proposed in [
17] in order to obtain a pneumatic soft-arm 3D model, based on a constant link’s bending curvature and neglecting the gravity or payload effects. Another geometrical approach for modeling a soft link is presented in [
18]. In this case, the approached model neglects the effects of gravity or internal elastic forces. Regarding tendon-based robots, in the hand exoskeleton given in [
19,
20], each finger is considered as a three-link kinematic chain and all the joints are considered to be pure revolute. Friction and cable guide deformation were neglected. As shown in the cases above, geometric modeling requires several constraints and assumptions to reduce the model complexity, which allow the designers to cope with the complex system mechanics. Nonetheless, the black-box modeling approach will include the whole system dynamics, which led to the proposed methods in this work.
Modeling of soft robotic links is of particular interest, given the coupled dynamics that arise when actuating the robots. In this sense, different approaches are presented as well. Geometrical approaches expose their limitations when the modeling space increases. Therefore, sensor-based approaches are being used, although their results are limited to the sensor’s range and capabilities. In [
21], textile strain sensors are embedded into the robot structure to calculate the link deflection state and position. A similar approach is presented in [
22,
23]. In this last one, the authors describe the implementation of a soft hand where each finger uses an elastic joint with an embedded piezo-electric transducer to sense the deflection of the joint. In this case, the curvature is given by the sensor but is assumed to be continuous through the link. A different sensor technique for embedded deflection modeling is presented in [
24], where photo-sensing is used to determine the deflection angle of the link. A 3D modeling approach is given in [
25], where embedded cameras for self-observing of the robot configuration are synchronized to obtain the final soft body (robot) shape through learning algorithms. The named references imply additional hardware but allow for rigid modeling based on sensor information. However, their effectiveness is limited to the sensor’s accuracy and the validity of the hypothesis over the soft link, such as continuous link curvature. Furthermore, to obtain the mathematical model, it is still required to neglect certain dynamics, and in some cases, only the 2D motion of the soft link is considered. In this work, the soft link is aimed to move in 3D and it is not desired to add additional hardware to the system.
This work aims to characterize the 3D motion of a tendon-driven soft neck described in [
26]. An improved version of the initial version was later proposed in [
27]. This new design features a soft bendable spine that replaces the central spring. The replaced structure decreases the overall weight and increases the system robustness. An inclination sensor was also introduced on the top platform for extracting the current pitch and roll angles, and enables feedback control.
Although the central structure introduced an already non-linear behaviour, as seen in [
27], the new material adds other non-linearity mechanics. Some previous works already tackle system identification. Firstly, in [
26] for control design, the study was limited to actuators and ignored the dynamics of the link. The resulting theoretical model is outside the standard modeling methods. As a consequence, additional methodology is required to extract a simulation and control model for the platform. An initial identification exploration on 2D was presented in [
28]. In that work, which this paper is a continuation of, we identified the soft link dynamics considering the actuators and the soft link. However, only the front inclination was considered, neglecting at that time the interactions that occur when all the soft neck degrees of freedom are used.
In this work, the proposed models are improved and extended to the entire robot motion range. Set membership and Recursive least-squares identification methods are used for modeling as in [
28]. As the recursive least-squares method is only valid for linear plants, the non-linear behavior will not be captured. The selected methods do not need hardware modifications nor neglected dynamics. Therefore, physical effects, such as gravity, elasticity, and plasticity will be considered by the obtained 3D models when possible. These models are compared with a neural network model identification as ground comparison. As an important contribution, no modeling technique selected relies on local deformation sensors, and they do not require additional external hardware for possible neck control considered in the future.
The remaining parts of this paper are organized as follows. In
Section 2, the platform to be identified is described.
Section 3 and
Section 4 present the different methods used for identification. In
Section 5 the experimental procedures are described and
Section 6 shows the resulting models. Then, in
Section 7, different tests are performed for validation and comparison purposes. Finally, in
Section 8, the main conclusions are discussed.
2. Soft Neck Description
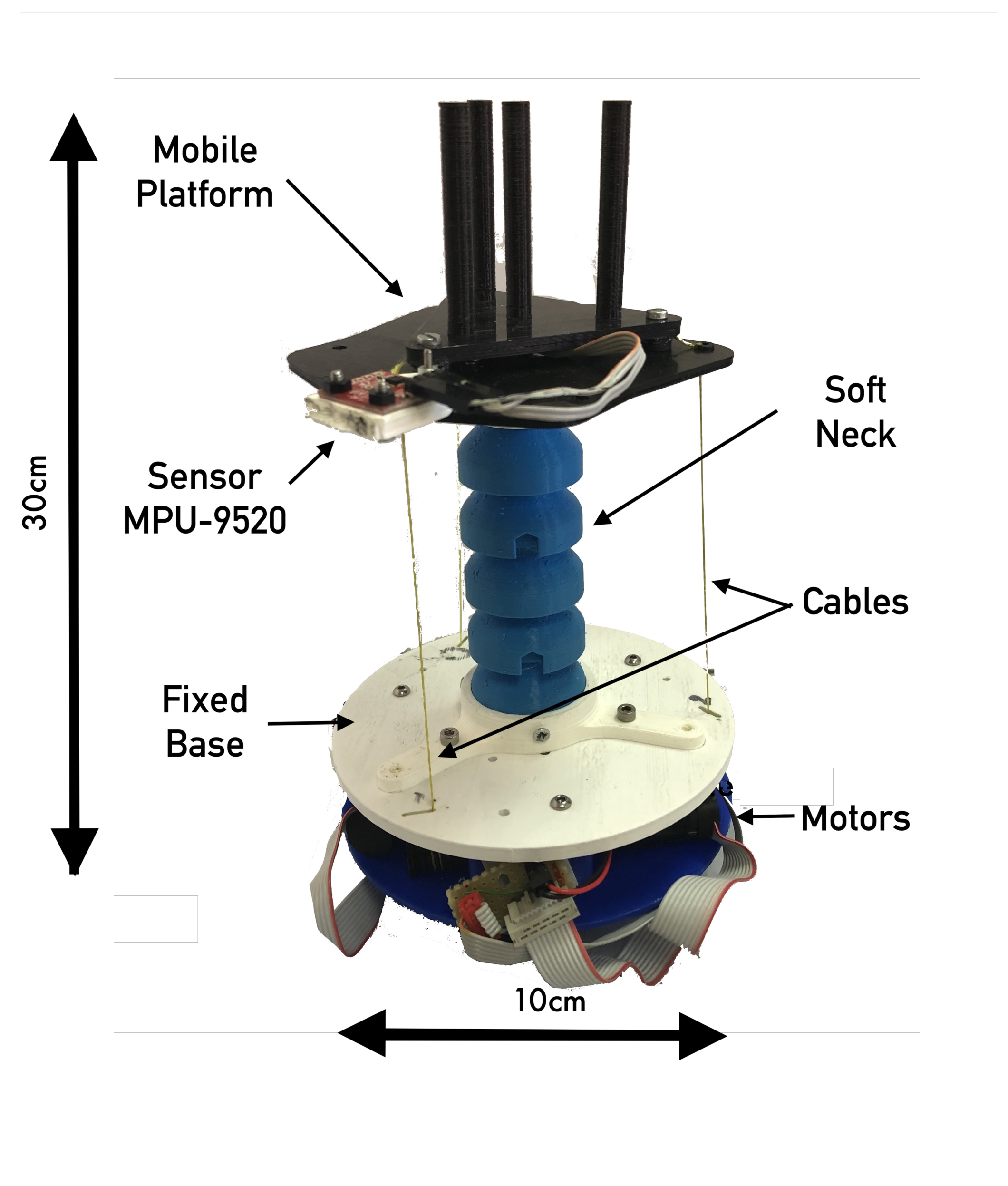
The mechanism that enables soft neck operation is the central soft link, which acts as a spine. It is made with bendable material and actuated with a parallel mechanism driven by cables, which produce a tilt in the upper platform.
Figure 1 shows the soft neck prototype and its parts.
The neck is composed of a base, a mobile platform, a central soft link, tendons (cables), and motors, as shown in
Figure 1. All parts were built using a 3D printer, including the soft link, which weighs
(excluding motors and hardware).
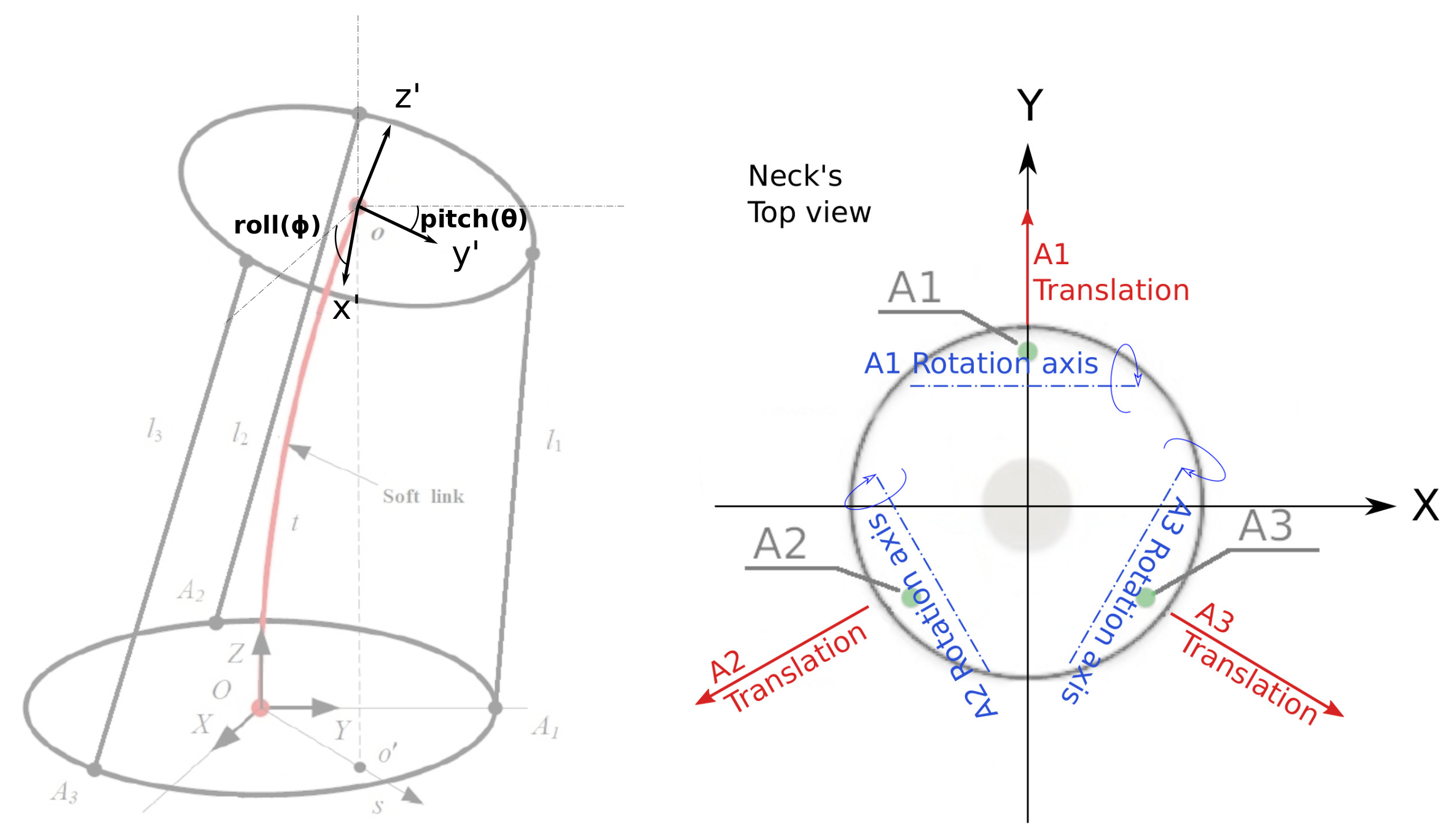
Combining the actions of the three actuators, any position or orientation can be reached inside the bounded space. As the robot workspace is three-dimensional, the final rotation can be defined using three Euler angles. The
Z-axis rotation (yaw) is neglected since it cannot change due to the configuration of the link; therefore, two rotations around the
X- and
Y-axes are enough to fully define the robot position and orientation. System output will be defined through an
X-axis rotation, roll(
), and a
Y-axis rotation, pitch (
), as shown in
Figure 2.
According to [
29,
30], the soft neck is a hyper-redundant robot. Therefore, the term degrees of freedom (DOF) is not applicable in the usual sense. Nevertheless, there is a connection between the three tendon lengths and the neck’s final angular position.
The three tendon actuators are located at the base, each composed with a motor, gear, encoder, and a driver, with the characteristics shown in
Table 1.
There exists low-level control managed by the motors’ drivers, which satisfies all the platform’s needs. For this reason, all system data are captured as an open-loop plan, with the actuator position and velocity as input and the inclinations roll and pitch as output.
Geometric Simplification
The described plant input and output variables are coupled, defining a Multiple Inputs Multiple Outputs (MIMO) system, which makes the system identification more difficult. Fortunately, there is a way to simplify the system, decoupling these variables, allowing to analyze its behavior through simpler Single-Input Single-Output (SISO) models. Using this scheme, the inverse kinematics described in [
31] will not be necessary, making the model identification easier.
The angle combination produced by each actuator effect is a final rotation that can be defined or measured by two angles. A more detailed analysis of the robot’s geometry will show the connection between the inputs and these final angle outputs. Since the inputs and outputs of the system are coupled in a MIMO system of three inputs and three outputs, it is desirable to rearrange the original input scheme using a linear combination of them. In this way, three new inputs will be obtained, having a direct action with respect to the outputs. Note that the aim is not to simplify the system, but to study the effects of the different inputs in the neck output variables. To simplify this operation, we will consider the system in the resting position. In this state, the single effect of the
actuator (reducing
) results in a rotation aligned with the
X-axis of the base frame (see
Figure 2). This results in an output angle directly related to the length of its tendon, and therefore, the motor position. Given that motor angles can be negative, we will consider the neck’s rest position (
) as the initial zero value for all tendons, resulting in positive values when tendon lengths increase, and negative otherwise. Considering just the first actuator with the index number 1, a possible equation describing pitch angle
in
X is the following:
where
is the angle contribution from the first actuator to the final pitch angle (
),
is the actuator input position, and
f is a nonlinear function describing the relation between both. Although it is considered that just
can change the angle
as shown in Equation (
1), given the neck’s nonlinear nature, the other inputs may have a tiny effect on that angle, too, but they are considered too small and will be neglected in this case. The other actuators’ effects (
,
) on the final angle
are the following:
Given the proposed vertical robot setup, and using the same actuators, we can assume that the functions
f are similar. Nevertheless, a projection factor needs to be considered, which depends on the actuator’s relative angle (
). We can generalize the previous functions in the following equation:
Keeping in mind that we are not modeling the system but proposing an alternative input–output scheme, we can consider these input angles additive. Again, it is not a model simplification, but an input redefinition.
According to
Figure 2, the three actuators are symmetrically arranged, and the angles are
,
and
. Therefore, Equation (
5) results in:
This result shows how both and actuator effects on the angle are divided by two, with an opposite direction to actuator . This leads to the first result of this approach. The angle is defined by the length difference, being positive when is larger than , and negative otherwise. In the case of , angle , leading to different robot compression states depending on the tendon lengths, form zero () to full compression ( ). This feature could be used to change the neck stiffness, although this is not discussed in this paper, where the soft link length is considered constant.
Now, roll angle (
) is defined as the rotation around the
Y-axis. Using the previous reasoning but projecting in the
Y-axis (using
):
In the case of
,
and
, Equation (
7) results in:
Note that in this case, the value of the angle just depends on the difference between and , and that the actuator has no effect. Again, the angle just depends on their difference, and the compression is an average function of the tendon lengths. For the case , angle , leading to the same previous result regarding soft link compression. Additionally, note that and angles depend on the tendon length difference, and the compression () depends on the tendon lengths’ average. Based on this, we can define the new input variables , and as a linear combination of the motor position inputs.
Using the results from Equations (
6) and (
8), and considering the link compression input as the motor positions’ average, the following input redefinition is proposed:
Using this input redefinition, we can decouple and simplify the system considering as an input, which provides a change exclusively in the output angle. Therefore, a nonlinear single-input single-output (SISO) system can be defined, having inputs and outputs. Likewise, and inputs will affect only the output values of and , respectively, defining another two SISO systems.
Based on this, the soft neck can be modeled as three decoupled SISO systems. The transfer functions
,
, and
will model the actual outputs (
,
,
) as a function of the new inputs (
,
,
), defined by Equations (
9)–(
11). Given the simplifications we have considered, the real behavior will be different in several aspects, like showing interference between actuators and a nonlinear plant response. These effects will be discussed in the Experiments section.
Two different system identification methods are used. First, the set membership method as described in [
32] is used for nonlinear identification, and second, recursive least-squares (RLS), as described in [
33], is applied for different tilt configurations, which will result in a linear system for each RLS identification performed. The evolution of these systems, according to the inclination, will be studied.
In the case of RLS system identification, the new redefined inputs (, and ) were considered instead of motor position inputs. Note that these are just the input redefinition, and the output angles still depend on the system dynamics. Although f functions are unknown, they are considered within the resulting models, although the nonlinear part may be neglected depending on the identification method.
3. Set Membership Non-Linear Identification
This section briefly describes the Non-Linear Set Membership (NLSM) identification method proposed in [
32].
Consider a system that has a Nonlinear AutoRegressive with eXogenous input (NARX) structure, as
where
is the system’s regressor formed by past samples of the system inputs
and the output
, as:
where
represents the measurement noise and
W is the function domain.
The NARX regressor is widely used in system identification considering its capacity of representing nonlinear dynamics and developing estimation algorithms which are computationally cost-efficient.
If
is unknown, but a set of measurements of
and
are available for
and considering that the noise magnitude is bounded by
:
and no statistical assumption on its behavior is made. The goal is to estimate
of
, where
is the estimation of
f.
Even though
f is unknown, the following information is available:
where
denotes the gradient of
and
is the Euclidean norm. Therefore, we assume that the identified system is continuous on its first derivative and has maximum growth of
for all the regressors applied to the function of interest.
On the other hand, if there is a Feasible System Set (FSS), which is the set of all systems in the space
which satisfies the following conditions:
therefore, there always exists a non-empty
and
when both assumptions on
and
e are true. Then, if we guarantee the validity of the conditions
and
over a set of measurements generated by the system to be identified, we will find a
. In [
32], the procedure to guarantee conditions
and
over a data set is presented. For the following sections, prior assumptions are considered to be true.
Given that the aim of the model is to find the output generated by the system for a new input, it is necessary to distinguish the identification data set,
k, and the new inputs
x. Hence, for a given input
, the optimal NLSM estimate of
is:
where:
and are optimal upper and lower bounds for , respectively.
and are Lipschitz-continuous on W; therefore, they belong to the FSS.
is an optimal approximation of
for any
norm, with
, with an optimality criterion as:
The NLSM algorithm produces a non-linear, non-parametric model which is embedded on the data set. That is, there is no explicit equation that represents the input–output or physical variables relation.
For a new regressor value
, the NLSM model output
is evaluated through Algorithm 1.
| Algorithm 1: Set membership algorithm. |
![Mathematics 09 01652 i001]() |
In order to obtain the FSS, as described in [
32,
34], it is possible to execute the Algorithm 1 over the identification data set, updating the variable
whenever the positive or negative projections
,
, over each data point
produces a greater,
, or lower,
, value.
3.1. Non-Linear Set Membership Data Set Generation
In our specific problem, as described in
Section 2, we have three motors that drive three tendons to actuate over the soft link and provide the desired pitch-roll motion. As described in Algorithm 1, to provide an estimation using Set Membership, we need to construct the FSS for a defined regressor that contains enough information so that all the identified system behaviors are contained in the FSS.
For this purpose, we define our regressor empirically since there are no standard methodologies to do so. Therefore, for simplicity, we run several system identifications using a neural networks MATLAB toolbox providing non-linear data-driven models for different regressor sizes. Once the NN is trained, we assume that the best neural network model uses the most informative regressor and corresponds to the original regressor selection. Later, to improve the computational time, the regressor is reduced by running different estimations modifying the number of elements in the regressor. In this way, less operations are required for each of the estimated data [
35]. The chosen regressor is:
where
is the desired motor position for motor
i at sample
k,
is the measured motor position at discrete time
k, and
y is the measured output at sample
k when an estimator and control model is generated. Therefore, if noise or disturbances are detected in the measured output, the model aligns its dynamics using this information with the true model dynamics. On the other hand, if the required model is generated for prediction and simulation, the signal in (
22) will be replaced by the previous model estimations at time
. In this case, errors and disturbances detected at the output will not be perceived by the model unless a closed-loop control action modifies the input components of the regressor. In this case, if the model diverges from the real dynamics, they will not align with each other. The model architectures are given in
Figure 3.
With the regressor being defined as in (
22), we generate our FSS by applying a sum of sinusoidals to each of the three motors such that the signals are not correlated and they give us a wide spectrum of the neck behavior. We capture the real motor positions, desired motor positions and, as output, the neck pitch and roll angles. Then, two separate models are generated.
The signal used for each motor
to create the FSS is described in Equation (
22). The values used for the specific motor are listed in
Table 2.
As it can be seen, the different signals are non-linear and have different frequencies and phases. This provides a pseudo-random interaction and covers a wide range of operational modes of the neck. The frequency spectrum that was chosen is coherent with the system bandwidth, which is , generating soft, continuous, and human-like motion in the axes of interest. By modifying the phase and mixing the minimum and maximum frequencies, we aim to explore in a single experiment a wide range of motions providing sufficient information for the FSS. However, it is necessary to point out that some system dynamics did not occur during the proposed study scenario, such as the three tendons pulling at the same time with the same force, which keeps a static neck position with different stiffness, as well as continuous single tendon activation, to name some. Even if the proposed FSS does not cover the full system dynamics, the chosen signal should cover the normal operational range for the soft neck.
The identification and validation data sets are given in
Figure 4, where 10,000 samples were taken, 7000 for the FSS (Identification Data Set) and 3000 for the validation set.
As seen in the Figure, the rotational position of the tendon is maximum . Having a pulley diameter of , each tendon has linear displacement of the tendon , and therefore, a maximum linear displacement of ≈45 mm. This generates inclinations of for the pitch and for the roll. This provides a wide dynamic range of motion. In addition, the motion frequency was set to replicate a human-like motion which is the region of interest.
4. Recursive Least-Squares Linear Identification
Despite the nonlinear nature of the plant, a simple recursive least-squares (RLS) identification was performed. On the one hand, it will show a qualitative estimation of the system’s nonlinearity degree, and on the other hand, a linear model could be used to solve the nonlinearity issues by means of robust or adaptive control strategies.
The RLS identification algorithm can be described using an ARX structure:
with
and
being the plant output and input variables, with a matrix representation as follows:
Increasing one time-index (
), Equations (
24)–(
26) provide the output prediction, based on the model parameters (
), and the set of past inputs and outputs (
). Comparing the next actual system output with this predicted value results in the prediction error:
In order to minimize this error, different algorithms can be used. In the least-squares case, the squared sum of all errors is the variable to be minimized. Since the parameters that minimize the error produced by the least-squares solution can also be obtained from the preceding parameters (recursively), the algorithm can be expressed using recursion, as shown below:
These equations define the operations needed to find
based on the previous parameters and captured inputs and outputs. An improved method is described in [
33] as RLS with a constant forgetting factor (CFF-RLS). It will not be necessary at this point, as the soft neck system identification will be done offline, but it can be used in the future, if an adaptive scheme is proposed as a solution to the nonlinearity issues. See [
33] or [
36] for a more detailed discussion about RLS and other identification methods.
Using the described inputs and outputs definition of
Section 2, the same data captured in the identification experiments were used in order to obtain a plant model. As the data capture is based on the motor positions, we can find the equivalent input values using Equations (
9) and (
10), and consider these inputs. The outputs will be the same as in the other cases, the neck pitch and roll angles.
For example,
Figure 5 shows part of the inputs and outputs considered for the pitch and roll RLS identification.
A small delay can be observed in the data set example shown in that Figure. This delay must be considered during the system identification process. The resulting transfer functions corresponding to the pitch dynamics,
, and roll dynamics,
, obtained using the RLS algorithm through the entire data set, are:
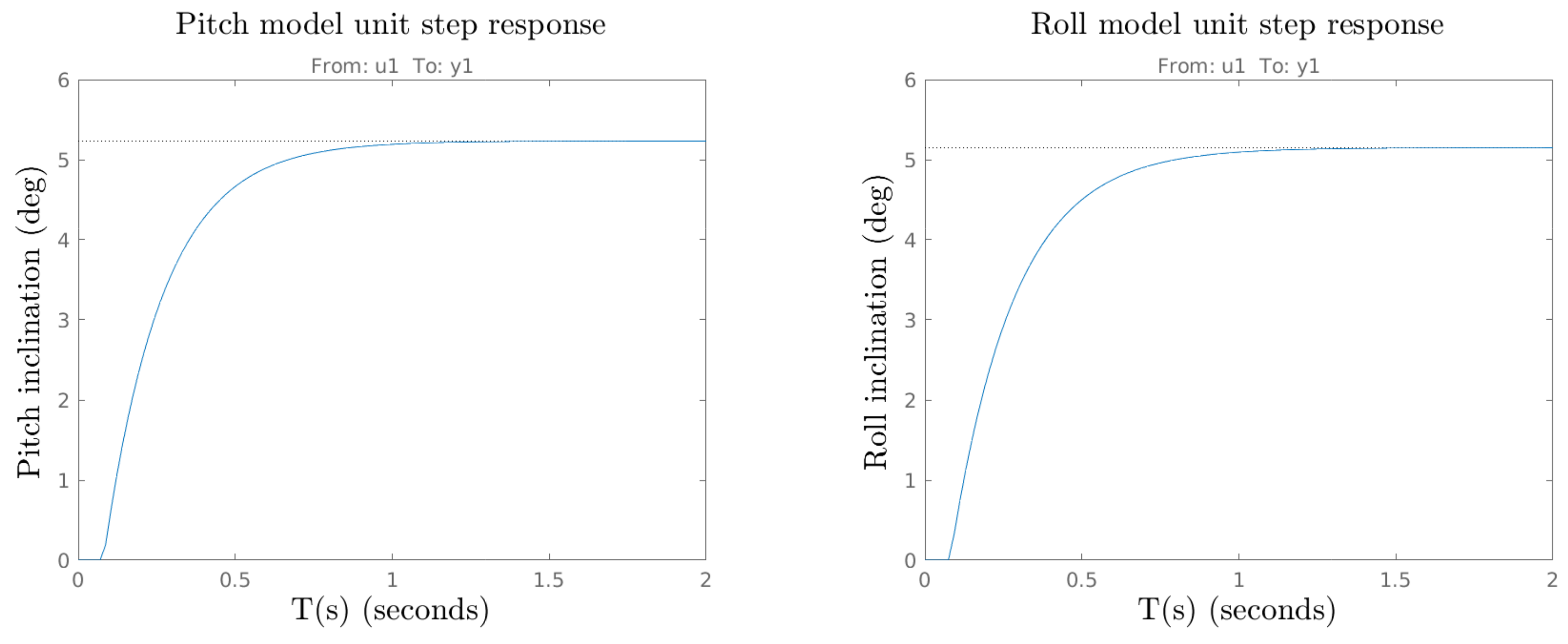
The model unit input time responses are shown in
Figure 6 for the described system model. Note how both systems’ (
,
(
s)) static gains are close to 5, showing a stationary response above the unit input level, as expected from
Figure 5.
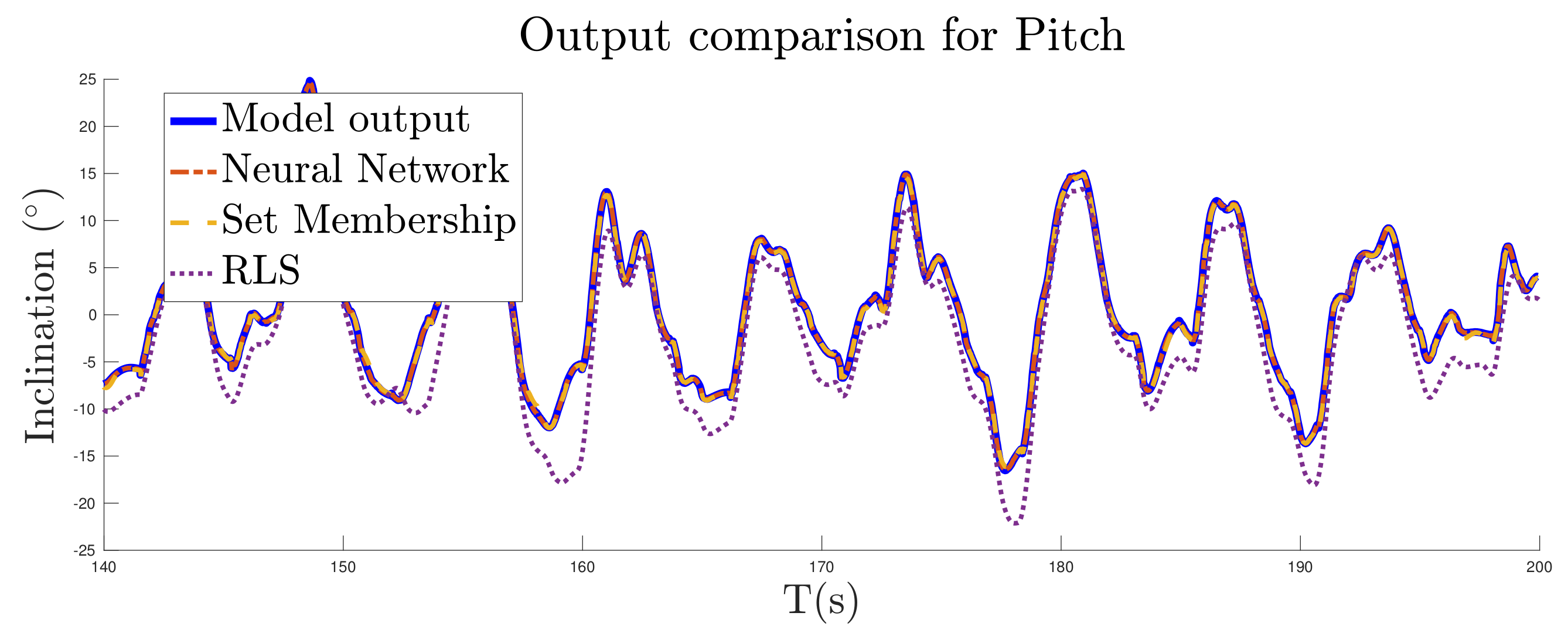
Once the linear models of the soft neck decoupled system are determined, a new input response simulation was performed using those models, together with a new data set for validation and accuracy check. A partial plot of these results is shown in
Figure 7 for the pitch and roll angles.
Note how although the linear model captures the system behavior quite well, there are mismatches due to plant non-linearity. In order to deal with these problems, a robust controller could be used in the future, since it will provide a constant behavior despite plant parameter changes or non-linearities.
8. Conclusions
In this work, an improved mathematical model for a robotic soft neck has been presented. The whole soft-neck actuation range was modeled, resulting in a multi-input multi-output (MIMO) system showing a total of three inputs and two outputs. In particular, a nonlinear data-driven identification model using Set Membership, a linear model using Recursive least-squares, and a Neural Network model have been developed and discussed in this paper.
The outstanding results show that the proposed methods are suitable for estimation and control purposes when measures from the output are available to align the models. As shown, given the high level of correlation that the identification data set has over the NN training and the FSS for the set membership, additional identification data are required to use the methods as predictors over long prediction horizons, although results show that the proposed models are viable in soft nonlinear dynamics with multiple inputs and outputs.
A shown advantage of the SM identification stands in the possibility of incorporating additional signal dependency, delays, and unknown dynamics through a richer identification data set which derives from better and more complex modeling without explicit knowledge of the system. Even though the computational time might be a future consideration, there already exist approximation methods to overcome this drawback.
The accuracy difference found between the linear and nonlinear models suggests an important plant non-linearity, as expected. This issue can lead to problems at the time of defining a control strategy, although there are several options which will be explored in upcoming studies.
From the control point of view, the self-aligning characteristic of the given methods provide further knowledge on forecasting in short horizons, which is interesting for predictive and robust control techniques. Besides, the linear model accuracy is good enough to propose solutions like adaptive or robust control, which can provide excellent results. The predictive models’ performance shown allows the use of the system for some applications. However, it is limited to continuous mode operation, which yet limits its utility. To overcome this issue, a more informative data set should be constructed that contains additional system behaviors to the continuous operation mode.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}