
A Multispecies Cross-Diffusion Model for Territorial Development


Abstract
:1. Introduction
1.1. Discrete Model
1.2. Phases and an Order Parameter
1.2.1. Expected Agent Density
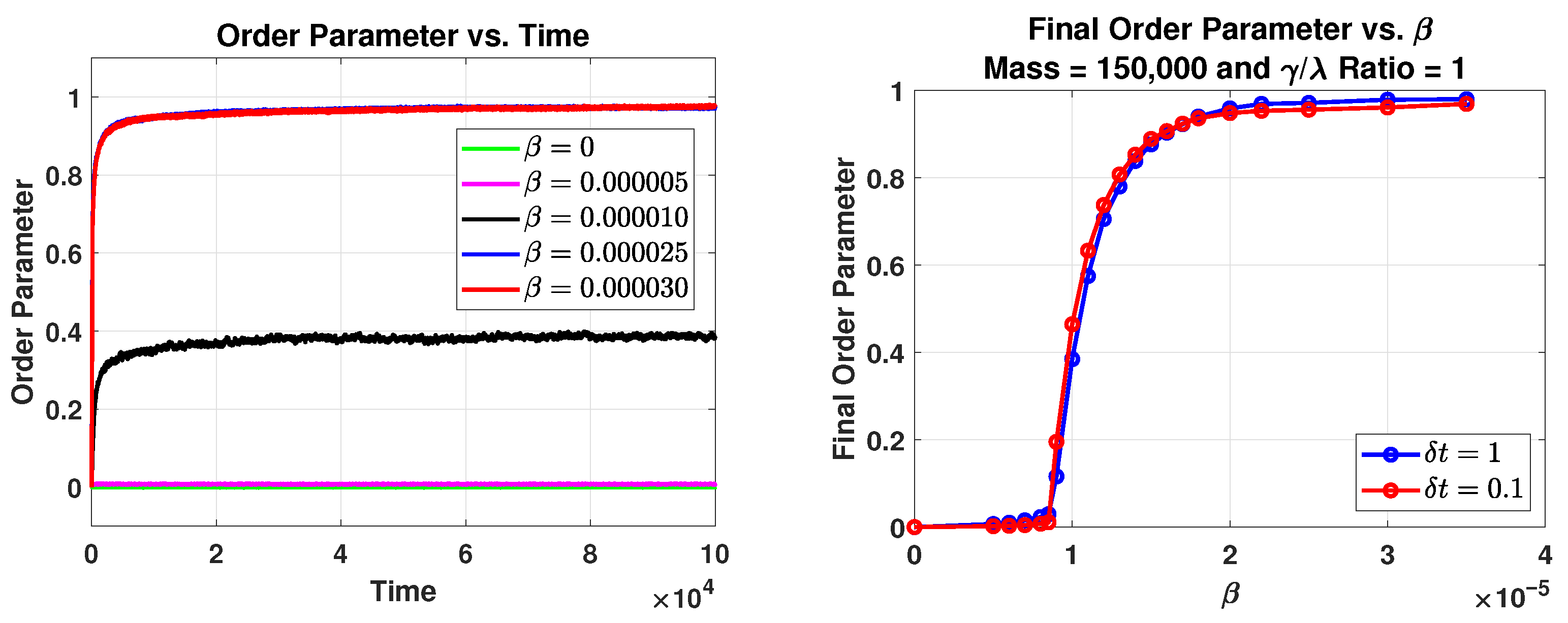
1.2.2. An Order Parameter
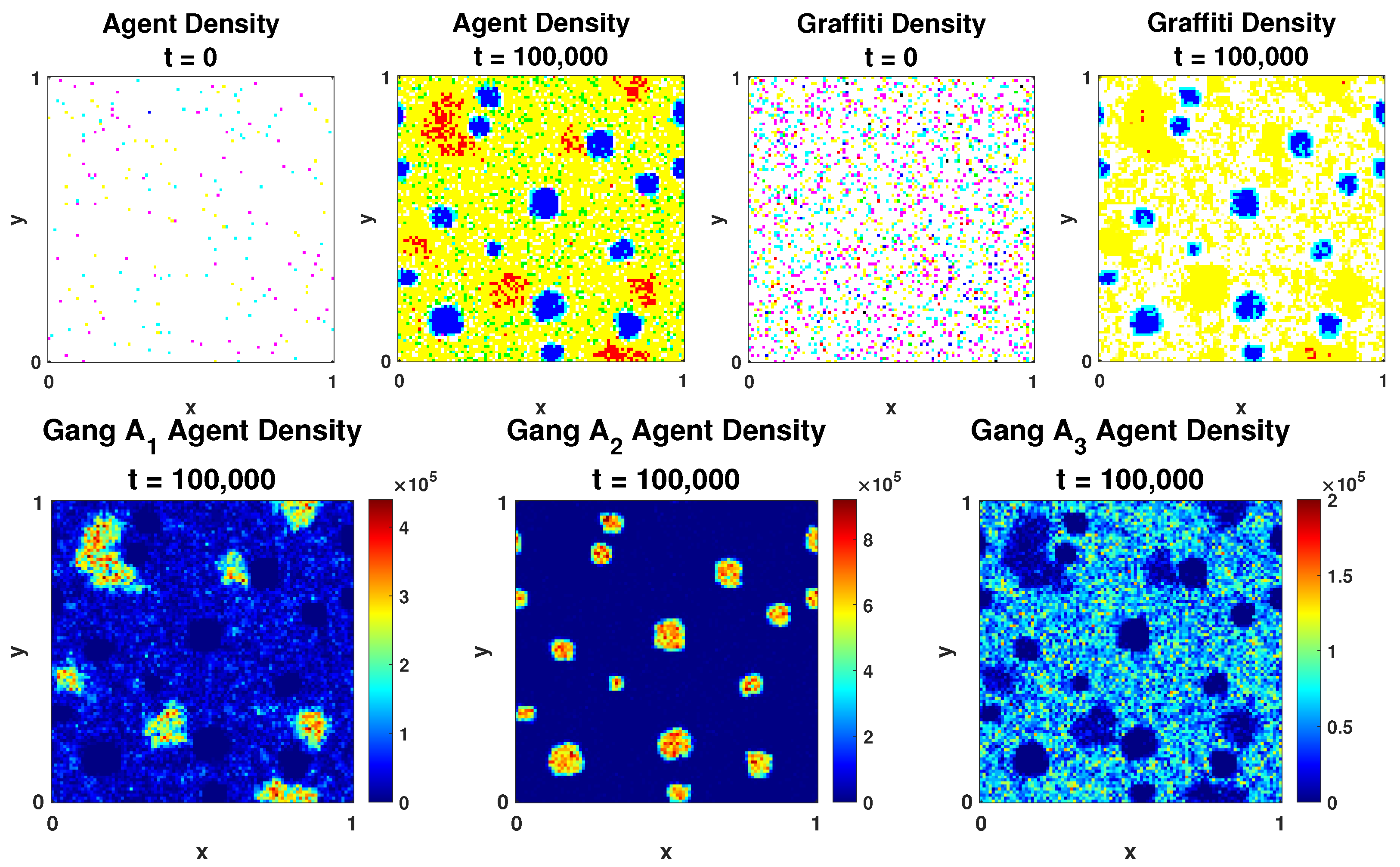
2. Simulations of the Discrete Model
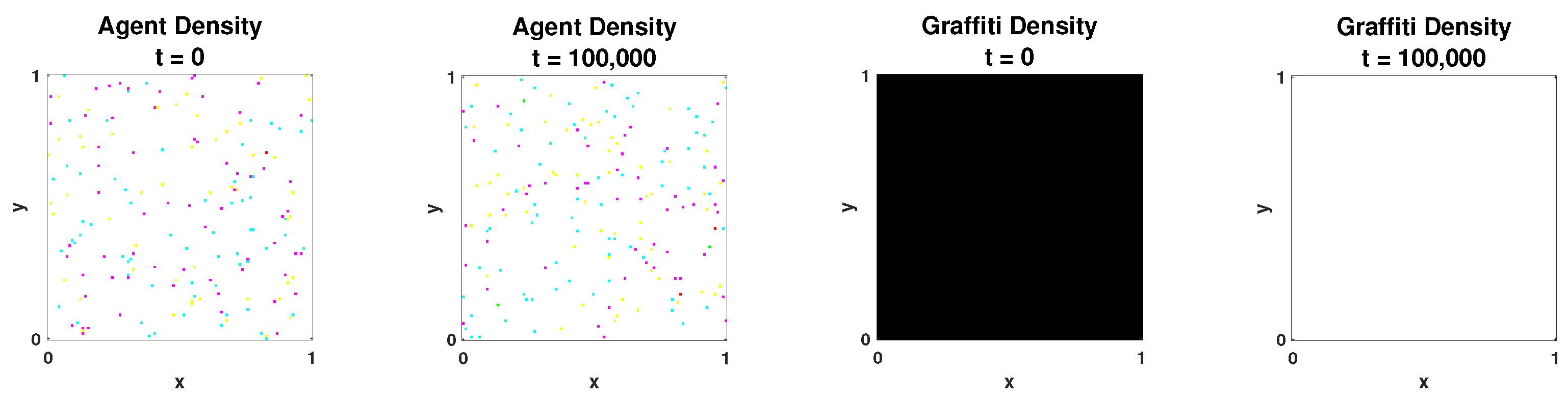
2.1. Well-Mixed State
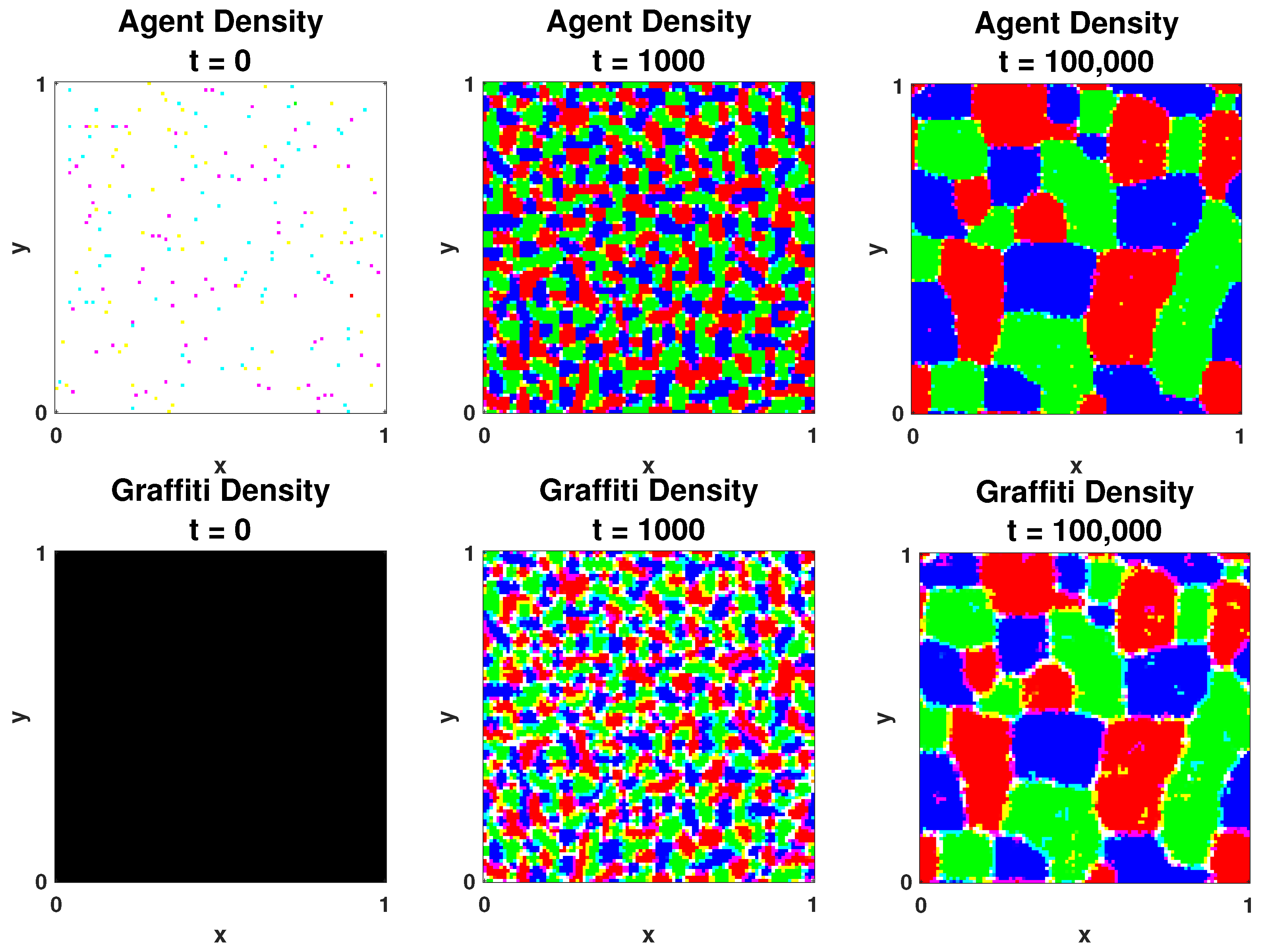
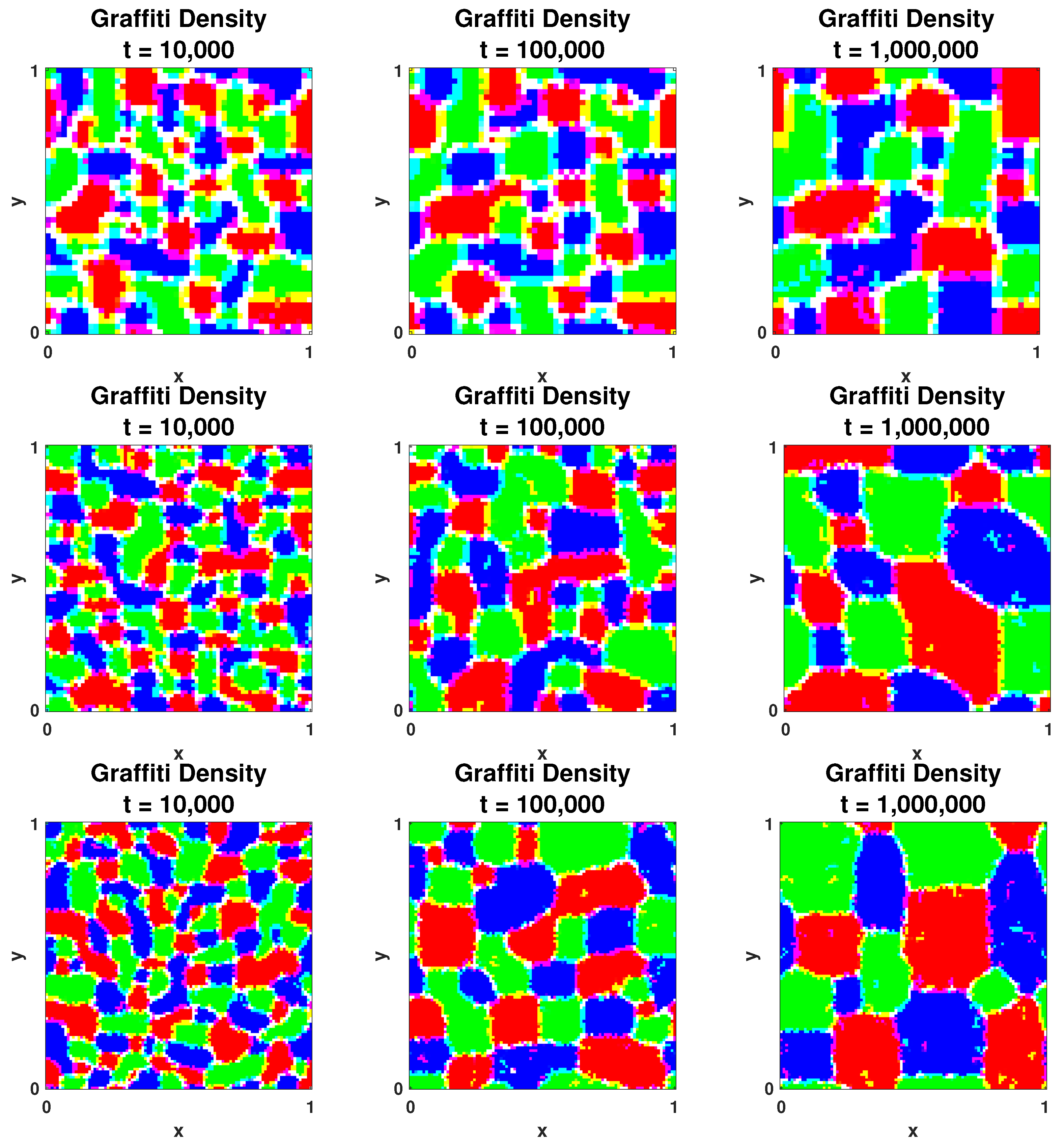
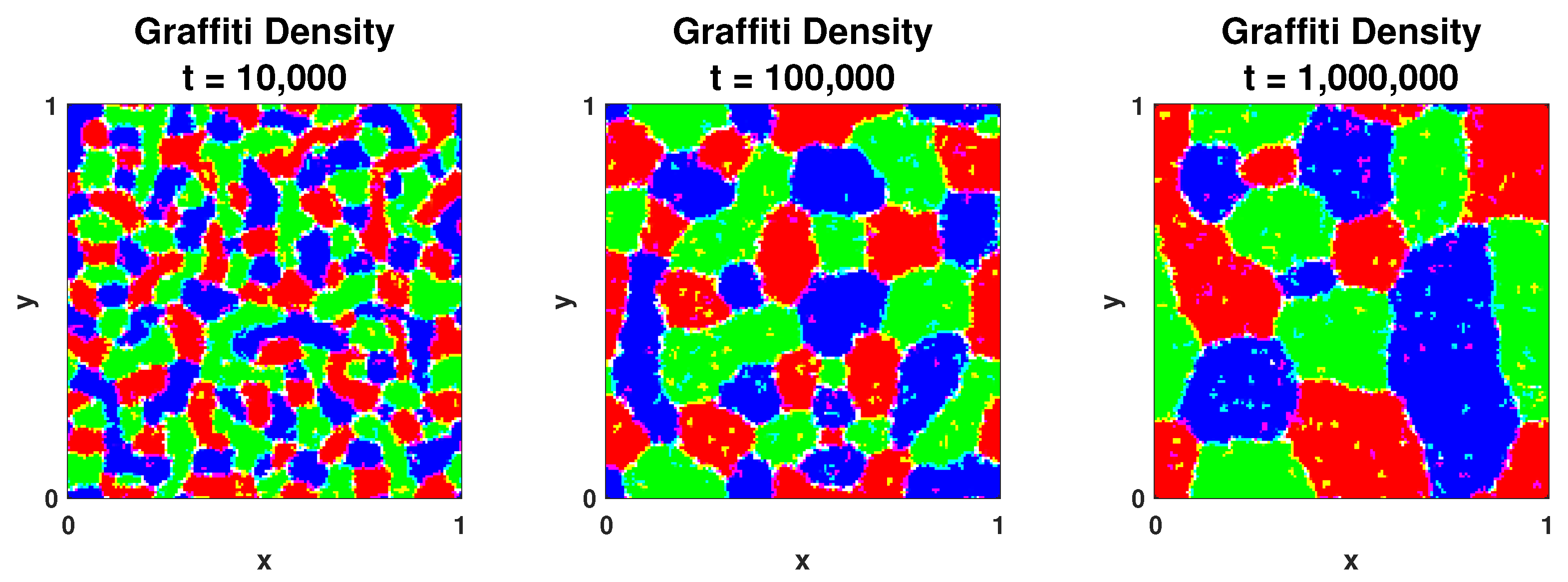
2.2. Segregated State
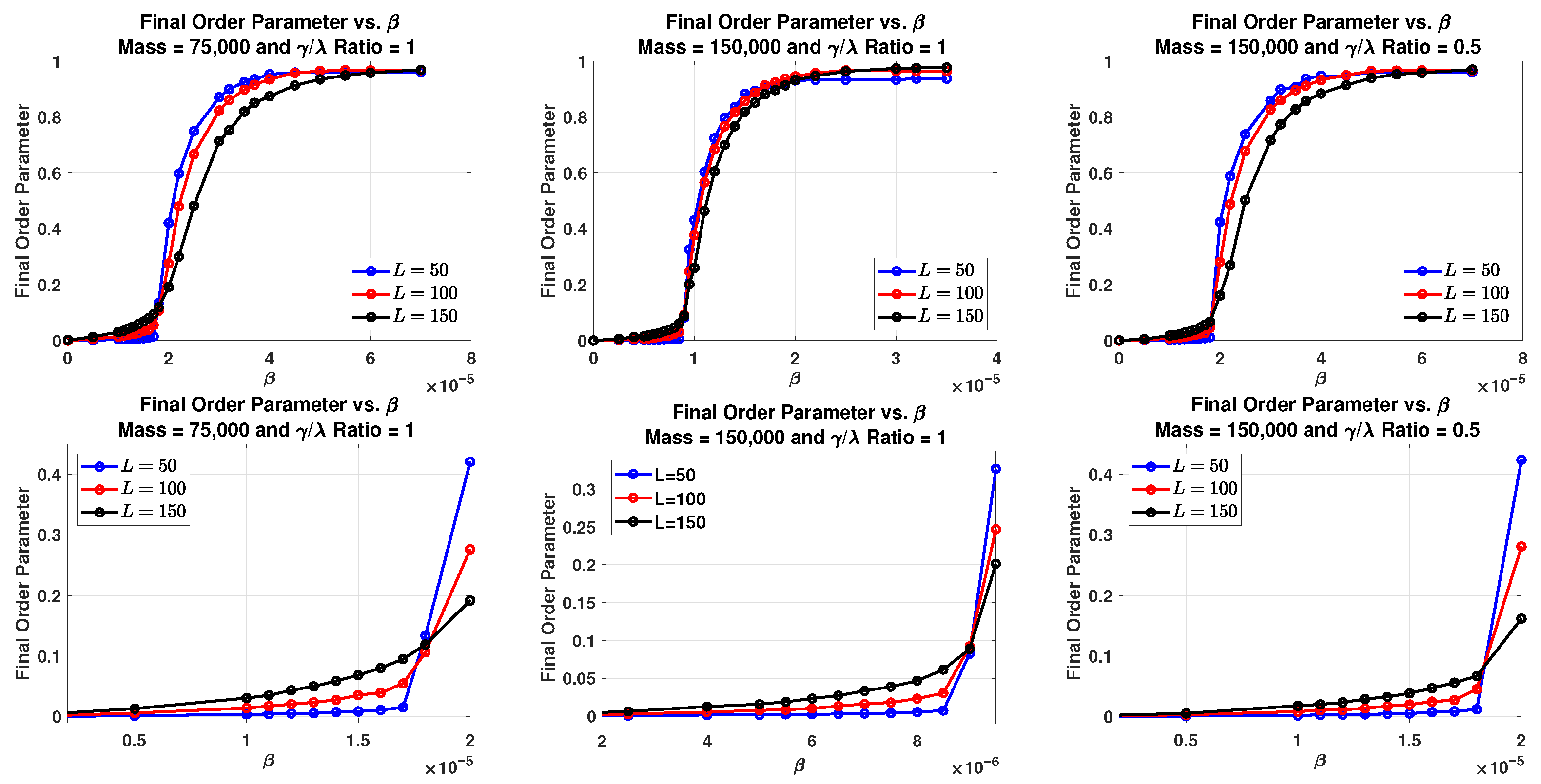
2.3. System Parameters and the Discrete Phase Transition
2.3.1. Effects of
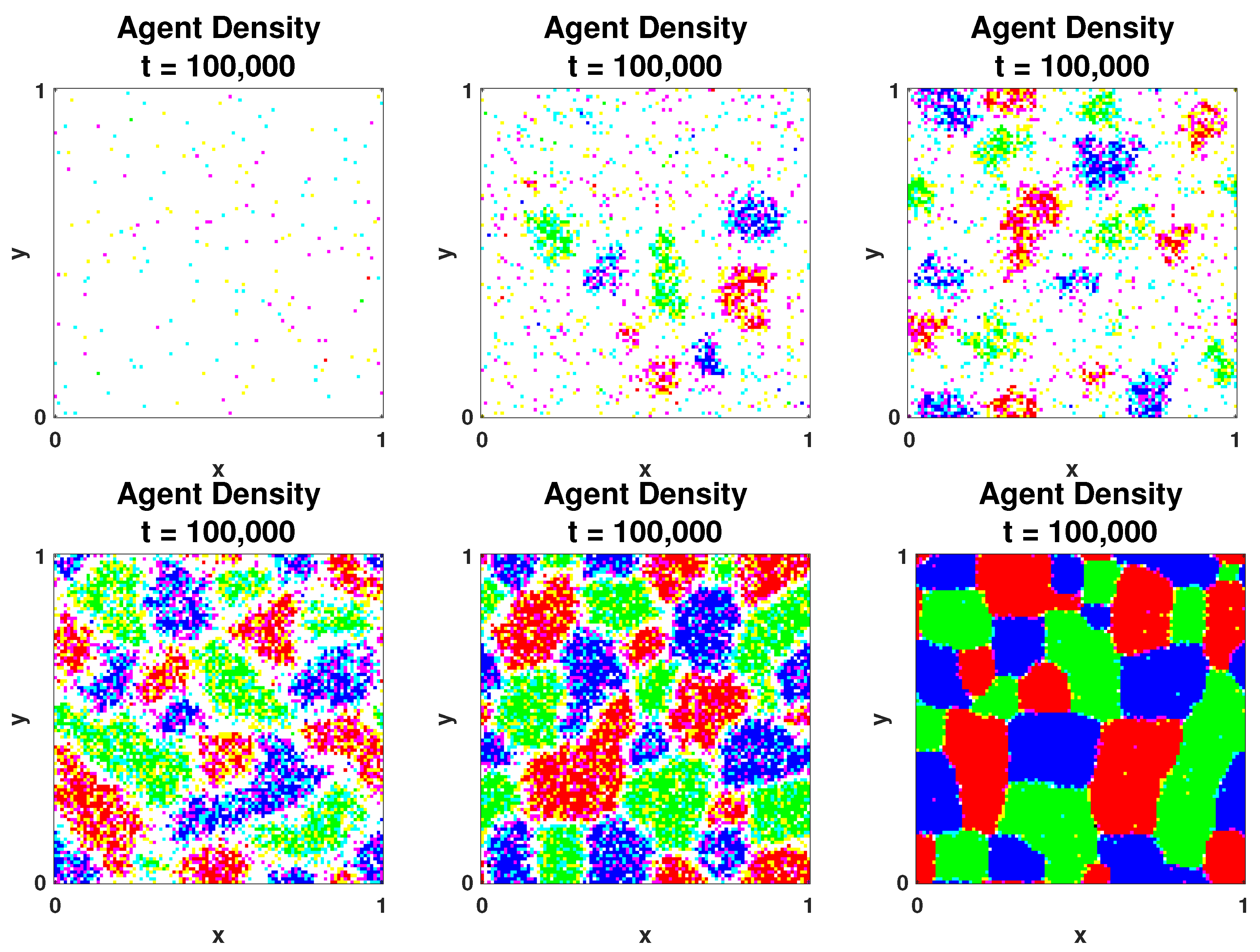
2.3.2. Effects of Other Parameters
3. Deriving the Convection-Diffusion System
3.1. Continuum Graffiti Density
3.2. Continuum Agent Density
3.2.1. Tools for the Derivation
3.2.2. The Derivation
3.3. Steady-State Solutions
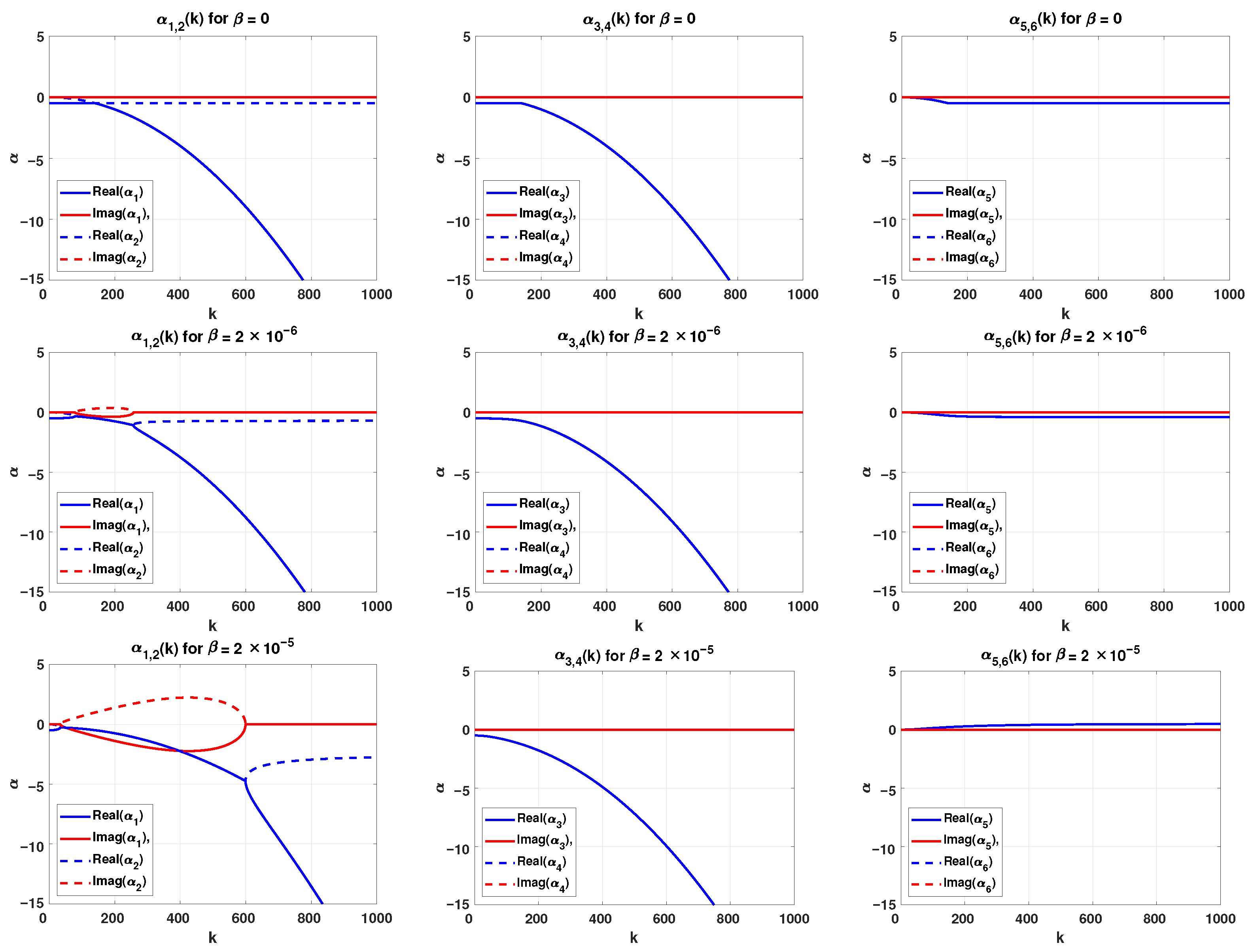
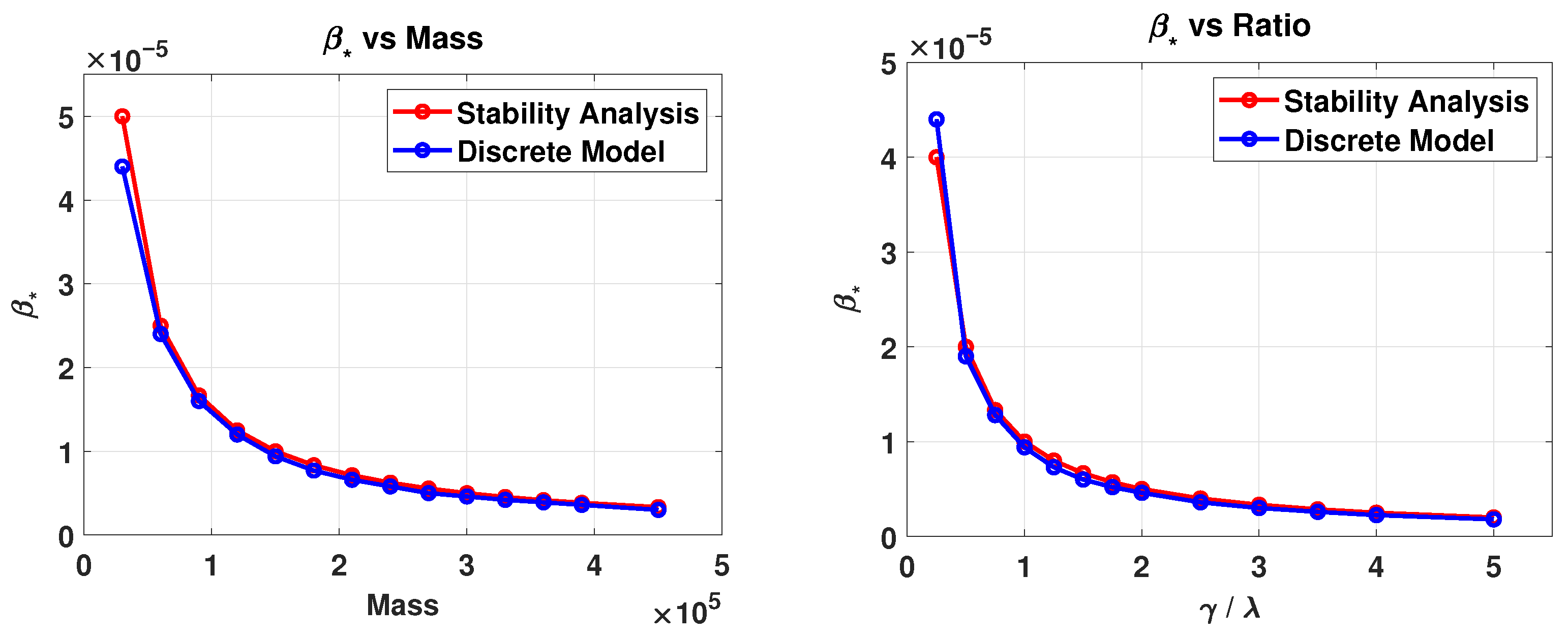
4. Linear Stability Analysis
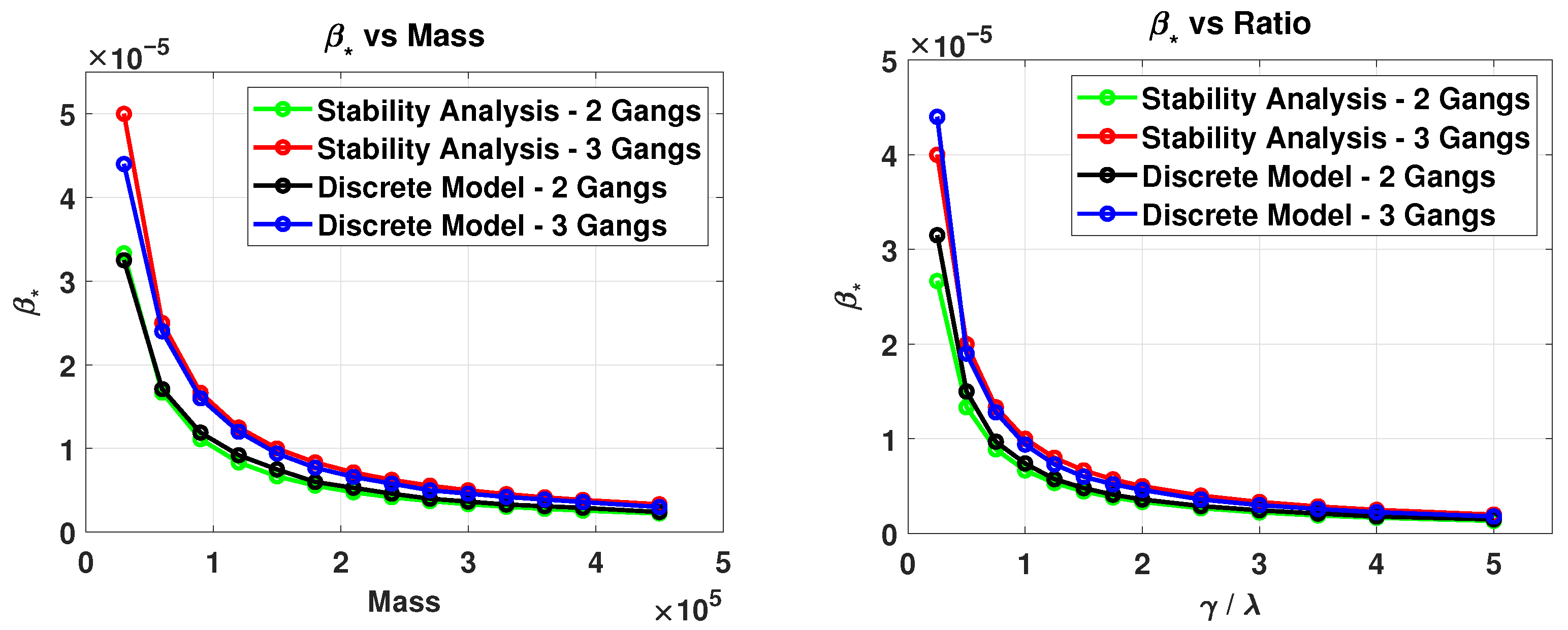
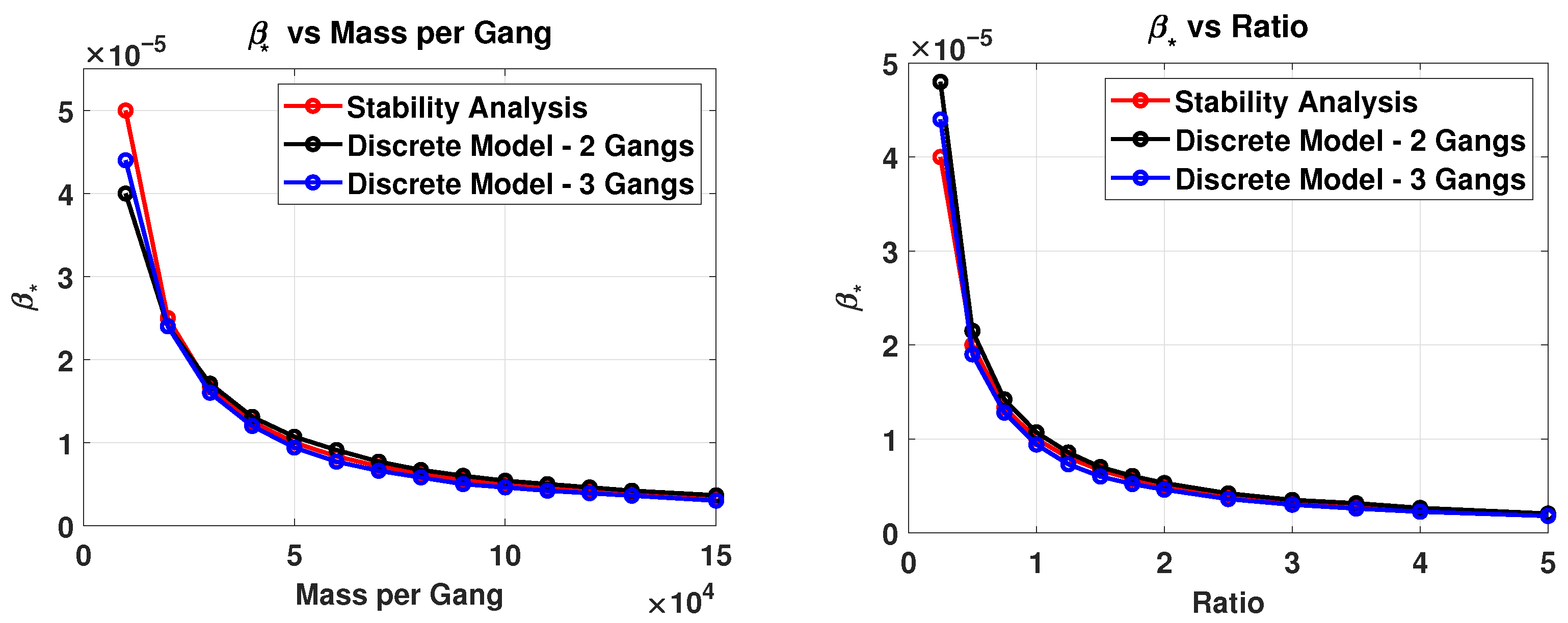
5. Variations of the Model: Varying by Gang
5.1. Timidity Model (Variation 1)
5.2. Threat Level Model (Variation 2)
5.3. Finding Critical for the Variations: Linear Stability Analysis
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Temeles, E.J. The role of neighbours in territorial systems: When are they ‘dear enemies’? Anim. Behav. 1994, 47, 339–350. [Google Scholar] [CrossRef] [Green Version]
- Sack, R.D. Human Territoriality: Its Theory and History; Cambridge University Press: Cambridge, UK, 1986; Volume 7. [Google Scholar]
- Schenk, H.J.; Callaway, R.M.; Mahall, B. Spatial root segregation: Are plants territorial? Adv. Ecol. Res. 1999, 28, 145–180. [Google Scholar]
- May, F.; Ash, J. An assessment of the allelopathic potential of Eucalyptus. Aust. J. Bot. 1990, 38, 245–254. [Google Scholar] [CrossRef]
- Moorcroft, P.R.; Lewis, M.A.; Crabtree, R.L. Home Range Analysis Using A Mechanistic Home Range Model. Ecology 1999, 80, 1656–1665. [Google Scholar] [CrossRef]
- Moorcroft, P.R.; Lewis, M.A.; Crabtree, R.L. Mechanistic Home Range Models Capture Spatial Patterns and Dynamics of Coyote Territories in Yellowstone. Proc. R. Soc. B 2006, 273, 1651–1659. [Google Scholar] [CrossRef] [Green Version]
- Peters, R.P.; Mech, L.D. Scent marking in wolves. Am. Sci. 1975, 63, 628–637. [Google Scholar] [PubMed]
- Lewis, M.; White, K.; Murray, J. Analysis of a Model for Wolf Territories. J. Math. Biol. 1997, 35, 749–774. [Google Scholar] [CrossRef]
- Potts, J.R.; Lewis, M.A. Spatial memory and taxis-driven pattern formation in model ecosystems. Bull. Math. Biol. 2019, 81, 2725–2747. [Google Scholar] [CrossRef] [Green Version]
- Alsenafi, A.; Barbaro, A.B. A convection—Diffusion model for gang territoriality. Phys. A Stat. Mech. Its Appl. 2018, 510, 765–786. [Google Scholar] [CrossRef]
- Krause, A.L.; Van Gorder, R.A. A non-local cross-diffusion model of population dynamics II: Exact, approximate, and numerical traveling waves in single-and multi-species populations. Bull. Math. Biol. 2020, 82, 113. [Google Scholar] [CrossRef]
- Taylor, N.P.; Kim, H.; Krause, A.L.; Van Gorder, R.A. A non-local cross-diffusion model of population dynamics I: Emergent spatial and spatiotemporal patterns. Bull. Math. Biol. 2020, 82, 112. [Google Scholar] [CrossRef] [PubMed]
- Brown, W.K. Graffiti, identity and the delinquent gang. Intern. J. Offender Comp. Criminol. 1978, 22, 46–48. [Google Scholar] [CrossRef]
- De Genova, N. America Abjection Chicanos, Gangs and Mexican/Migrant Transnationality in Chicago. Aztlán J. Chicano Stud. 2008, 34, 141–174. [Google Scholar]
- Adams, K.; Winter, A. Gang Graffiti as a Discourse Genre. J. Socioling. 1997, 1, 337–360. [Google Scholar] [CrossRef]
- Ley, D.; Cybriwsky, R. Urban graffiti as territorial markers. Ann. Assoc. Am. Geogr. 1974, 64, 491–505. [Google Scholar] [CrossRef]
- Smith, L.M.; Bertozzi, A.L.; Brantingham, P.J.; Tita, G.E.; Valasik, M. Adaptation of an Ecological Territiorial Model to Street Gang Spatial Patterns in Los Angeles. Discret. Contin. Dyn. Syst. 2012, 32, 3223–3244. [Google Scholar] [CrossRef]
- Hegemann, R.A.; Smith, L.M.; Barbaro, A.B.; Bertozzi, A.L.; Reid, S.E.; Tita, G.E. Geographical influences of an emerging network of gang rivalries. Phys. A Stat. Mech. Its Appl. 2011, 390, 3894–3914. [Google Scholar] [CrossRef] [Green Version]
- Barbaro, A.B.; Chayes, L.; D’Orsogna, M.R. Territorial developments based on graffiti: A statistical mechanics approach. Physica A 2013, 392, 252–270. [Google Scholar] [CrossRef] [Green Version]
- Ising, E. Beitrag zur theorie des ferromagnetismus. Z. Phys. Hadron. Nucl. 1925, 31, 253–258. [Google Scholar] [CrossRef]
- Van Gennip, Y.; Hunter, B.; Ahn, R.; Elliott, P.; Luh, K.; Halvorson, M.; Reid, S.; Valasik, M.; Wo, J.; Tita, G.E.; et al. Community detection using spectral clustering on sparse geosocial data. SIAM J. Appl. Math. 2013, 73, 67–83. [Google Scholar] [CrossRef]
- Short, M.B.; D’Orsogna, M.R.; Pasour, V.B.; Tita, G.E.; Brantingham, P.; Bertozzi, A.L.; Chayes, L.B. A Statistical Model of Criminal Behavior. Math. Model. Methods Appl. Sci. 2008, 18, 1249–1267. [Google Scholar] [CrossRef]
- Rodríguez, N. On the global well-posedness theory for a class of PDE models for criminal activity. Phys. D Nonlinear Phenom. 2013, 260, 191–200. [Google Scholar] [CrossRef]
- Rodriguez, N.; Bertozzi, A. Local existence and uniqueness of solutions to a PDE model for criminal behavior. Math. Model. Methods Appl. Sci. 2010, 20, 1425–1457. [Google Scholar] [CrossRef]
- Berestycki, H.; Rodriguez, N.; Ryzhik, L. Traveling wave solutions in a reaction-diffusion model for criminal activity. Multiscale Model. Simul. 2013, 11, 1097–1126. [Google Scholar] [CrossRef] [Green Version]
- Jones, P.A.; Brantingham, P.J.; Chayes, L.R. Statistical Models of Criminal Behavior: The Effects of Law Enforcement Actions. Math. Model. Methods Appl. Sci. 2010, 20, 1397–1423. [Google Scholar] [CrossRef] [Green Version]
- Zipkin, J.R.; Short, M.B.; Bertozzi, A.L. Cops on the dots in a mathematical model of urban crime and police response. Discret. Contin. Dyn. Syst. Ser. B 2014, 19, 1479–1506. [Google Scholar] [CrossRef]
- Mei, L.; Wei, J. The existence and stability of spike solutions for a chemotax is system modeling crime pattern formation. Math. Model. Methods Appl. Sci. 2020, 30, 1727–1764. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, Y.; Bertozzi, A.L.; Short, M.B. A stochastic-statistical residential burglary model with independent Poisson clocks. Eur. J. Appl. Math. 2021, 32, 35–38. [Google Scholar] [CrossRef] [Green Version]
- Berestyki, H.; Rodríguez, N. Analysis of a heterogeneous model for riot dynamics: The effect of censorship of information. Eur. J. Appl. Math. 2016, 27, 554. [Google Scholar] [CrossRef]
- Rodríguez, N.; Ryzhik, L. Exploring the effects of social preference, economic disparity, and heterogeneous environments on segregation. Commun. Math. Sci. 2016, 14, 363–387. [Google Scholar] [CrossRef] [Green Version]
- D’Orsogna, M.R.; Perc, M. Statistical physics of crime: A review. Phys. Life Rev. 2015, 12, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Barbaro, A.B.; Rodriguez, N.; Yoldaş, H.; Zamponi, N. Analysis of a cross-diffusion model for rival gangs interaction in a city. arXiv 2020, arXiv:2009.04189. [Google Scholar]
- Baxter, R.J. Exactly Solved Models in Statistical Mechanics; Courier Corporation: Gloucester, MA, USA, 2007. [Google Scholar]
- Cahn, J.W.; Hilliard, J.E. Free energy of a nonuniform system. I. Interfacial free energy. J. Chem. Phys. 1958, 28, 258–267. [Google Scholar] [CrossRef]
- Dolak, Y.; Schmeiser, C. Kinetic models for chemotaxis: Hydrodynamic limits and spatio-temporal mechanisms. J. Math. Biol. 2005, 51, 595–615. [Google Scholar] [CrossRef] [PubMed]
- Short, M.B.; Bertozzi, A.L.; Brantingham, P.J. Nonlinear Patterns in Urban Crime: Hotspots, Bifurcations, and Suppression. SIAM J. Appl. Dyn. Syst. 2010, 9, 462–483. [Google Scholar] [CrossRef] [Green Version]
- Briscoe, B.K.; Lewis, M.A.; Parrish, S.E. Home Range Formation in Wolves Due to Scent Making. Bull. Math. Biol. 2002, 64, 261–284. [Google Scholar] [CrossRef] [Green Version]
- White, K.; Lewis, M.; Murray, J. A Model for Wolf-Pack Territory Formation and Maintenance. J. Theor. Biol. 1996, 178, 29–43. [Google Scholar] [CrossRef]
- Patlak, C.S. Random walk with persistence and external bias. Bull. Math. Biophys. 1953, 15, 311–338. [Google Scholar] [CrossRef]
- Keller, E.F.; Segel, L.A. Initiation of slime mold aggregation viewed as an instability. J. Theor. Biol. 1970, 26, 399–415. [Google Scholar] [CrossRef]
- Morisita, M. Population density and dispersal of a water strider. Gerris lacustris: Observations and considerations on animal aggregations. Contrib. Physiol. Ecol. Kyoto Univ. 1950, 65, 1–149. [Google Scholar]
- Morisita, M. Habitat preference and evaluation of environment of an animal. Experimental studies on the population density of an antlion, Glenuroides japonicus M’L. [= correctly Hagenomyia micans]. I. Physiol. Ecol. 1952, 5, 1–16. [Google Scholar]
- Gurtin, M.E.; Pipkin, A. A note on interacting populations that disperse to avoid crowding. Q. Appl. Math. 1984, 42, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Vanag, V.K.; Epstein, I.R. Cross-diffusion and pattern formation in reaction—Diffusion systems. Phys. Chem. Chem. Phys. 2009, 11, 897–912. [Google Scholar] [CrossRef]
- Burger, M.; Carrillo, J.A.; Pietschmann, J.F.; Schmidtchen, M. Segregation effects and gap formation in cross-diffusion models. Interfaces Free. Boundaries 2020, 22, 175–203. [Google Scholar] [CrossRef]
- Di Francesco, M.; Esposito, A.; Fagioli, S. Nonlinear degenerate cross-diffusion systems with nonlocal interaction. Nonlinear Anal. 2018, 169, 94–117. [Google Scholar] [CrossRef] [Green Version]
- Carrillo, J.A.; Huang, Y.; Schmidtchen, M. Zoology of a nonlocal cross-diffusion model for two species. SIAM J. Appl. Math. 2018, 78, 1078–1104. [Google Scholar] [CrossRef] [Green Version]
- Bruna, M.; Burger, M.; Ranetbauer, H.; Wolfram, M.T. Cross-diffusion systems with excluded-volume effects and asymptotic gradient flow structures. J. Nonlinear Sci. 2017, 27, 687–719. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Set | Gang | Value of | % Territory, Model 1 | % Territory, Model 2 |
|---|---|---|---|---|
| Set 1 | Gang 1 | % | % | |
| Gang 2 | % | % | ||
| Gang 3 | % | % | ||
| Set 2 | Gang 1 | % | % | |
| Gang 2 | % | % | ||
| Gang 3 | % | % | ||
| Set 3 | Gang 1 | % | % | |
| Gang 2 | % | % | ||
| Gang 3 | % | % | ||
| Set 4 | Gang 1 | % | % | |
| Gang 2 | % | % | ||
| Gang 3 | % | % | ||
| Set 5 | Gang 1 | % | % | |
| Gang 2 | % | % | ||
| Gang 3 | % | % | ||
| Set 6 | Gang 1 | % | % | |
| Gang 2 | % | % | ||
| Gang 3 | % | % |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsenafi, A.; Barbaro, A.B.T. A Multispecies Cross-Diffusion Model for Territorial Development. Mathematics 2021, 9, 1428. https://doi.org/10.3390/math9121428
Alsenafi A, Barbaro ABT. A Multispecies Cross-Diffusion Model for Territorial Development. Mathematics. 2021; 9(12):1428. https://doi.org/10.3390/math9121428
Chicago/Turabian StyleAlsenafi, Abdulaziz, and Alethea B. T. Barbaro. 2021. "A Multispecies Cross-Diffusion Model for Territorial Development" Mathematics 9, no. 12: 1428. https://doi.org/10.3390/math9121428