Rigorous Mathematical Investigation of a Nonlocal and Nonlinear Second-Order Anisotropic Reaction-Diffusion Model: Applications on Image Segmentation

Abstract
:1. Introduction
- , varies in , ;
- () the gradient of in x, that is . Setting , , then ;
- is the Laplace operator—a second-order differential operator, defined as the divergence () of the gradient of in x;
- is the partial derivative of with respect to t;
- are positive values.
- is a positive and bounded nonlinear real function of class with bounded derivatives (see [1]), having the role of controlling the speed of the diffusion process and enhances the edges (e.g., in the evolving image);
- is the mobility;
- is a positive and bounded real function;
- is the distributed control (a given function), where
- is the boundary control (a given function);
- n = n(x) is the outward unit normal vector to at a point . denotes differentiation along n;
- , verifying
2. Well-Posedness of the Solution of (5)
- The -theory of linear and quasi-linear parabolic equations;
- Green’s first identity,,for any scalar-valued function y and z, a continuously differentiable vector field in n dimensional space;
- The Lions and Peetre embedding theorem (see [1] and references therein) to ensure the existence of a continuous embedding , where the number is defined as follows (see (3))and, for and , denotes the Sobolev space on Q:(see [1] for more details).
2.1. The Proof of Theorem 1
2.2. The Proof of Theorem 1 (Continued)
- A.
- If (15) has a unique solution, then H is well-defined. By the right hand of , using Lemma 1, it follows that, , then and thus, the same reasoning as in [1] allows us to conclude that for , the linear parabolic boundary value problem formulated in (15) has a unique solution, that is (see (14)) , and . Next, the embedding , (see (3) and (7)), allows us to conclude that, and .Thus, the operator H is well-defined.
- B.
2.2.1. The Proof of the First Part in Theorem 1: The Regularity of
2.2.2. The Uniqueness of the Solution
3. A Novel Nonlinear Second-Order Anisotropic Reaction-Diffusion Model in Image Segmentation
- is a real function, symmetric, continuous, nonnegative and it’s compactly supported in the unit sphere, such that .
3.1. Numerical Approximation
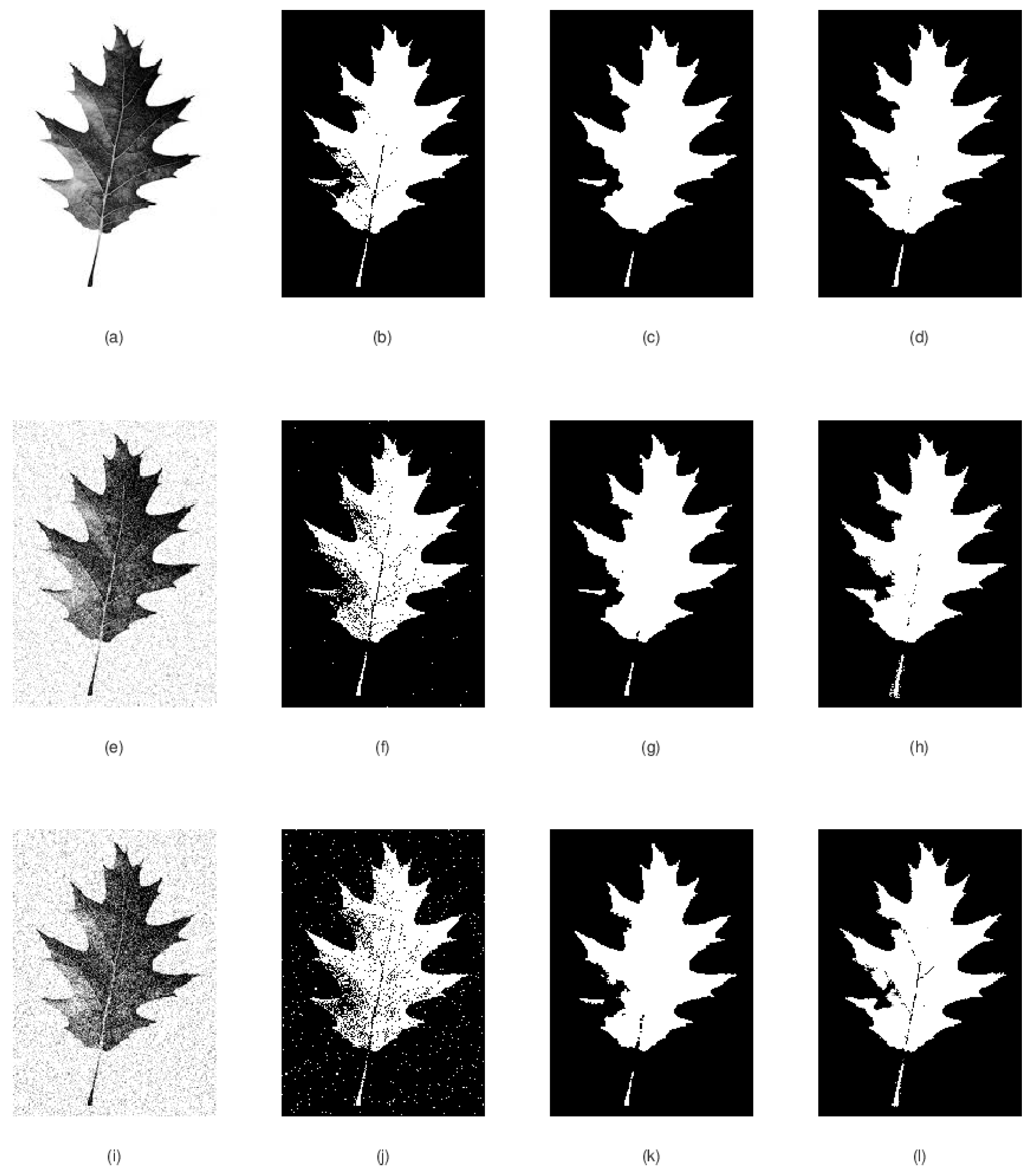
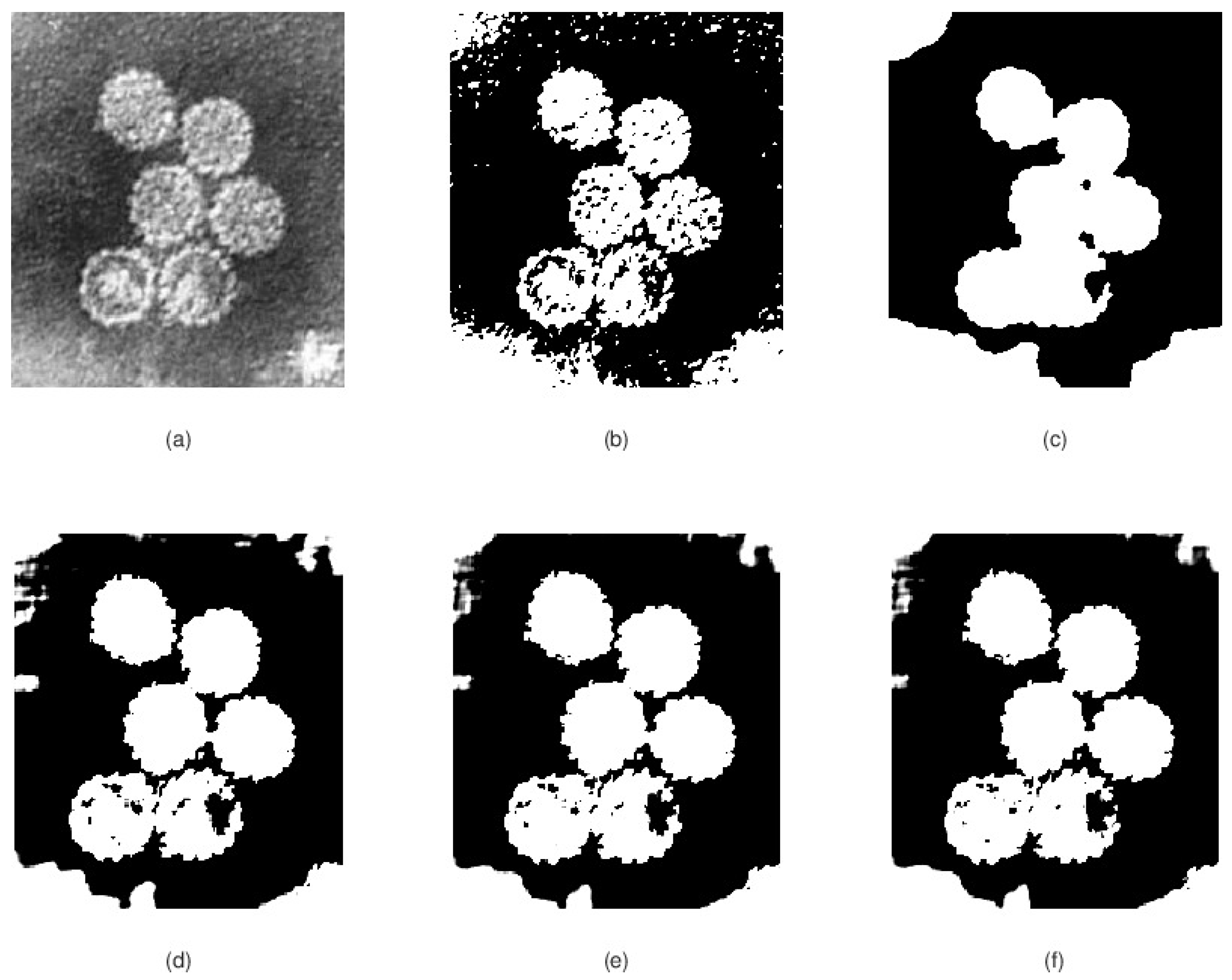
3.2. Experimental Results
| Algorithm 1: Reaction-diffusion based image segmentation algorithm |
 |
4. Conclusions
- We use novel techniques, such as Leray-Schauder principle, a priori estimates, -theory, to elaborate a rigorous qualitative study of the nonlocal and nonlinear second-order anisotropic reaction–diffusion parabolic problem, endowed with a nonlinearity of cubic type as well as non-homogeneous Cauchy–Neumann boundary conditions, expressed by (1) and (31). We note that, due to the presence of the nonlinear coefficient (see (30)), the proposed second-order nonlinear reaction–diffusion scheme (31) represents a non-variational PDE model. Therefore, it cannot be obtained from a minimization of any energy cost functional, thus this scheme is not a variational PDE model.
- Two two numerical schemes (47) and (48) are constructed to approximate the solution of the mathematical models (31) and (32) (local and nonlocal case).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Miranville, A.; Moroşanu, C. A Qualitative Analysis of a Nonlinear Second-Order Anisotropic Diffusion Problem with Non-homogeneous Cauchy–Stefan–Boltzmann Boundary Conditions. Appl. Math. Optim. 2019. [Google Scholar] [CrossRef]
- Allen, S.M.; Cahn, J.W. A microscopic theory for antiphase boundary motion and its application to antiphase domain coarsening. Acta Metall. 1979, 27, 1085–1095. [Google Scholar] [CrossRef]
- Bates, P.W.; Brown, S.; Han, J. Numerical analysis for a nonlocal Allen-Cahn equation. Int. J. Numer. Anal. Model. 2009, 6, 33–49. [Google Scholar]
- Bogoya, M.; Gómez, J. On a nonlocal diffusion model with Neumann boundary conditions. Nonlinear Anal. 2012, 75, 3198–3209. [Google Scholar] [CrossRef]
- Chan, T.F.; Vese, L.A. Active contours without edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef] [Green Version]
- Caginalp, G.; Lin, J.-T. A numerical analysis of an anisotropic phase field model. IMA J. Appl. Math. 1987, 39, 51–66. [Google Scholar] [CrossRef]
- Hundsdorfer, W.; Verwer, J. Numerical Solution of Time-Dependent Advection-Diffusion-Reaction Equations; Springer Series in Computational Mathematics; Springer: Berlin/Heidelberg, Germany, 2003; Volume 33. [Google Scholar]
- de Masi, A.; Orlandi, E.; Presutti, E.; Triolo, L. Stability of the interface in a model of phase separation. Proc. R. Soc. Edin. A 1994, 124, 1013–1022. [Google Scholar] [CrossRef]
- Moroşanu, C. Approximation of the phase-field transition system via fractional steps method. Numer. Funct. Anal. Optimiz. 1997, 18, 623–648. [Google Scholar] [CrossRef]
- Moroşanu, C. Cubic spline method and fractional steps schemes to approximate the phase-field system with non-homogeneous Cauchy-Neumann boundary conditions. ROMAI J. 2012, 8, 73–91. [Google Scholar]
- Moroşanu, C. Analysis and Optimal Control of Phase-Field Transition System: Fractional Steps Methods; Bentham Science Publishers: Sharjah, UAE, 2012. [Google Scholar] [CrossRef] [Green Version]
- Moroşanu, C. Well-posedness for a phase-field transition system endowed with a polynomial nonlinearity and a general class of nonlinear dynamic boundary conditions. J. Fixed Point Theory Appl. 2016, 18, 225–250. [Google Scholar] [CrossRef]
- Moroşanu, C. Qualitative and quantitative analysis for a nonlinear reaction-diffusion equation. ROMAI J. 2016, 12, 85–113. Available online: https://rj.romai.ro/arhiva/2016/2/Morosanu.pdf (accessed on 13 December 2020).
- Moroşanu, C.; Croitoru, A. Analysis of an iterative scheme of fractional steps type associated to the phase-field equation endowed with a general nonlinearity and Cauchy-Neumann boundary conditions. J. Math. Anal. Appl. 2015, 425, 1225–1239. [Google Scholar] [CrossRef]
- Barbu, T.; Miranville, A.; Moroşanu, C. A qualitative analysis and numerical simulations of a nonlinear second-order anisotropic diffusion problem with non-homogeneous Cauchy-Neumann boundary conditions. Appl. Math. Comput. 2019, 350, 170–180. [Google Scholar] [CrossRef]
- Moroşanu, C.; Pavăl, S.; Trenchea, C. Analysis of stability and errors of three methods associated to the nonlinear reaction-diffusion equation supplied with homogeneous Neumann boundary conditions. J. Appl. Anal. Comput. 2017, 7, 1–19. [Google Scholar] [CrossRef]
- Ovono, A.A. Numerical approximation of the phase-field transition system with non-homogeneous Cauchy-Neumann boundary conditions in both unknown functions via fractional steps methods. JAAC 2013, 3, 377–397. [Google Scholar] [CrossRef]
- Ignat, L.I.; Rossi, J.D. A nonlocal convection-diffusion equation. J. Funct. Anal. 2007, 251, 399–437. [Google Scholar] [CrossRef] [Green Version]
- Cârjă, O.; Miranville, A.; Moroşanu, C. On the existence, uniqueness and regularity of solutions to the phase-field system with a general regular potential and a general class of nonlinear and non-homogeneous boundary conditions. Nonlinear Anal. TMA 2015, 113, 190–208. [Google Scholar] [CrossRef]
- Gavriluţ, A.; Moroşanu, C. Well-Posedness for a Nonlinear Reaction-Diffusion Equation Endowed with Nonhomogeneous Cauchy-Neumann Boundary Conditions and Degenerate Mobility. ROMAI J. 2018, 14, 129–141. [Google Scholar]
- Moroşanu, C.; Motreanu, D. The phase field system with a general nonlinearity. Int. J. Differ. Equ. Appl. 2000, 1, 187–204. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using Matlab, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Jeong, D.; Lee, S.; Lee, D.; Shin, J.; Kim, J. Comparison study of numerical methods for solving the Allen-Cahn equation. Comput. Mater. Sci. 2016, 111, 131–136. [Google Scholar] [CrossRef]
- Kanungo, T.; Mount, D.M.; Netanyahu, N.S.; Piatko, C.D.; Silverman, R.; Wu, A.Y. An efficient k-means clustering algorithm: Analysis and implementation. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 881–892. [Google Scholar] [CrossRef]
- Lee, D.; Lee, S. Image Segmentation Based on Modified Fractional Allen–Cahn Equation. Math. Probl. Eng. 2019. [Google Scholar] [CrossRef]
- Lie, J.; Lysaker, M.; Tai, X.C. A variant of the level set method and applications to image segmentation. Math. Comput. 2006, 75, 1155–1174. [Google Scholar] [CrossRef] [Green Version]
- Rubinstein, J.; Sternberg, P. Nonlocal reaction-diffusion equations and nucleation. IMA J. Appl. Math. 1992, 48, 249–264. [Google Scholar] [CrossRef]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. In Proceedings of the IEEE Computer Society Workshop on Computer Vision, San Juan, PR, USA, 17–19 June 1997; pp. 16–22. [Google Scholar] [CrossRef] [Green Version]
- Taylor, J.E.; Cahn, J.W. Diffuse interfaces with sharp corners and facets: Phase-field models with strongly anisotropic surfaces. Physics D 1998, 112, 381–411. [Google Scholar] [CrossRef]
- Weickert, J. Anisotropic Diffusion in Image Processing. In European Consortium for Mathematics in Industry; B. G. Teubner: Stuttgart, Germany, 1998. [Google Scholar]
- Hu, Y.; Jacob, M. Higher degree total variation (HDTV) regularization for image recovery. IEEE Trans. Image Process. 2012, 21, 2559–2571. [Google Scholar] [CrossRef]
- Benes, M.; Chalupecky, V.; Mikula, K. Geometrical image segmentation by the Allen–Cahn equation. Appl. Numer. Math. 2004, 51, 187–205. [Google Scholar] [CrossRef]
- Bresson, X.; Chan, T. Non-Local Unsupervised Variational Image Segmentation Models; Technical Report; UCLA CAM: Los Angeles, CA, USA, 2008; pp. 8–67. [Google Scholar]
- Cortazar, C.; Elgueta, M.; Rossi, J.D.; Wolanski, N. Boundary fluxes for nonlocal diffusion. J. Differ. Equ. 2007, 234, 360–390. [Google Scholar] [CrossRef] [Green Version]
- Siddiqi, K.; Lauzière, Y.B.; Tannenbaum, A.; Zucker, S.W. Area and length minimizing flows for shape segmentation. IEEE Trans. Image Process. 1998, 7, 433–443. [Google Scholar] [CrossRef]
- Tai, X.C.; Christiansen, O.; Lin, P.; Skjælaaen, I. Image segmentation using some piecewise constant level set methods with MBO type of projection. Int. J. Comput. Vis. 2007, 73, 61–76. [Google Scholar] [CrossRef]
- Vijayakrishna, R.; Kumar, B.V.R.; Halim, A. A PDE Based Image Segmentation Using Fourier Spectral Method. Differ. Equ. Dyn. Syst. 2018. [Google Scholar] [CrossRef]
- Gilboa, G.; Osher, S. Nonlocal Linear Image Regularization and Supervised Segmentation. Multiscale Model. Simul. 2007, 6, 595–630. [Google Scholar] [CrossRef]
- Wang, L.-L.; Gu, Y. Efficient Dual Algorithms for Image Segmentation Using TV-Allen-Cahn Type Models. Commun. Comput. Phys. 2011, 9, 859–877. [Google Scholar] [CrossRef]
- Schonlieb, C.B.; Bertozzi, A. Unconditionally stable schemes for higher order inpainting. Commun. Math. Sci. 2011, 9, 413–457. [Google Scholar]
- Ruuth, S.J. Implicit-explicit methods for reaction-diffusion problems in pattern formation. J. Math. Biol. 1995, 34, 148–176. [Google Scholar] [CrossRef]
- Craus, M.; Paval, S.-D. An Accelerating Numerical Computation of the Diffusion Term in a Nonlocal Reaction-Diffusion Equation. Mathematics 2020, 8, 2111. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Area Size (Pixels) | 65,536 | 262,144 | 1,048,576 |
| Time Taken (Seconds) | 0.3 | 2.0 | 30.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moroşanu, C.; Pavăl, S. Rigorous Mathematical Investigation of a Nonlocal and Nonlinear Second-Order Anisotropic Reaction-Diffusion Model: Applications on Image Segmentation. Mathematics 2021, 9, 91. https://doi.org/10.3390/math9010091
Moroşanu C, Pavăl S. Rigorous Mathematical Investigation of a Nonlocal and Nonlinear Second-Order Anisotropic Reaction-Diffusion Model: Applications on Image Segmentation. Mathematics. 2021; 9(1):91. https://doi.org/10.3390/math9010091
Chicago/Turabian StyleMoroşanu, Costică, and Silviu Pavăl. 2021. "Rigorous Mathematical Investigation of a Nonlocal and Nonlinear Second-Order Anisotropic Reaction-Diffusion Model: Applications on Image Segmentation" Mathematics 9, no. 1: 91. https://doi.org/10.3390/math9010091