Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems


Abstract
:1. Introduction
Notations, Definitions and Preliminary Results
2. Main Results
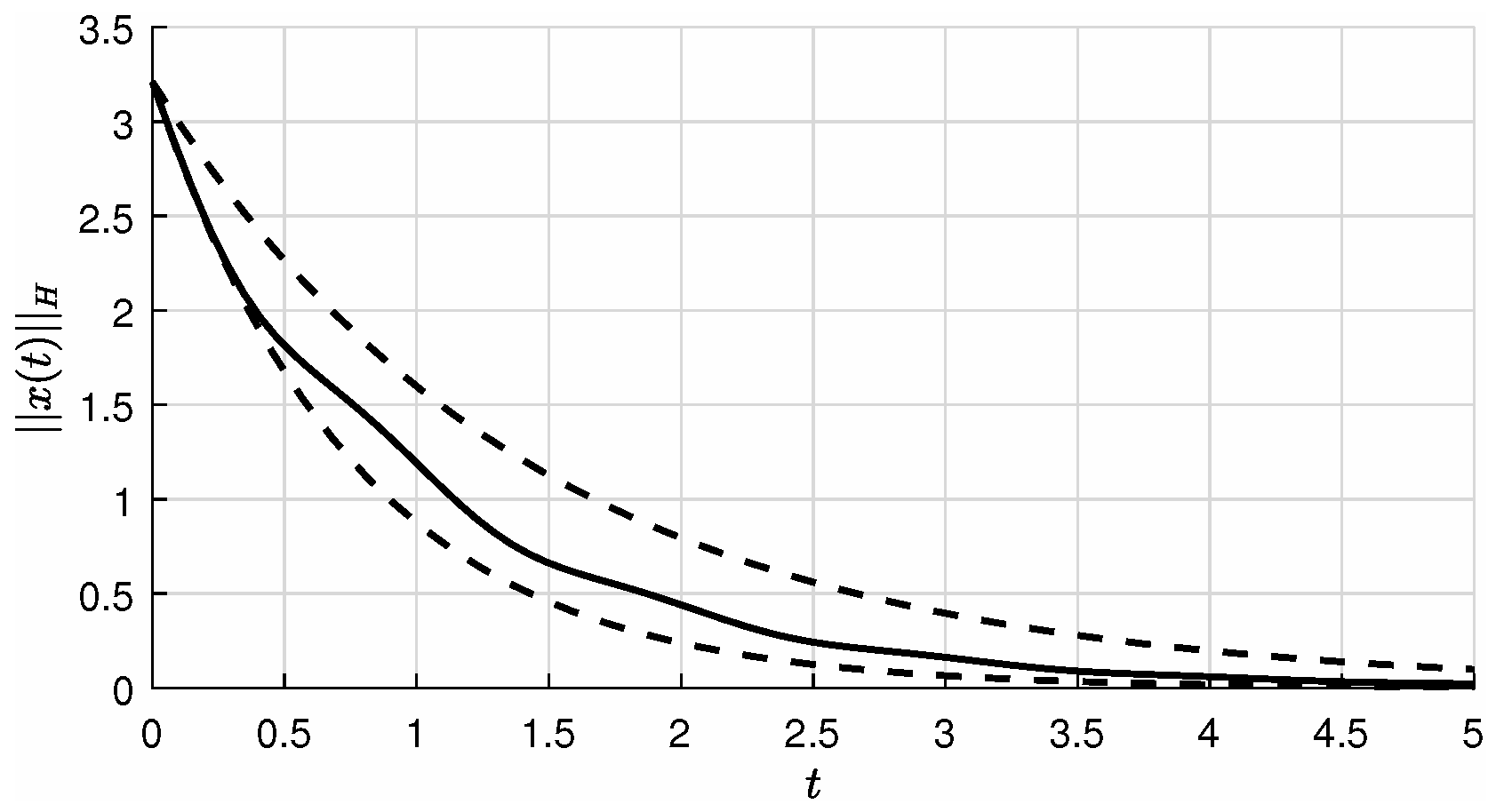
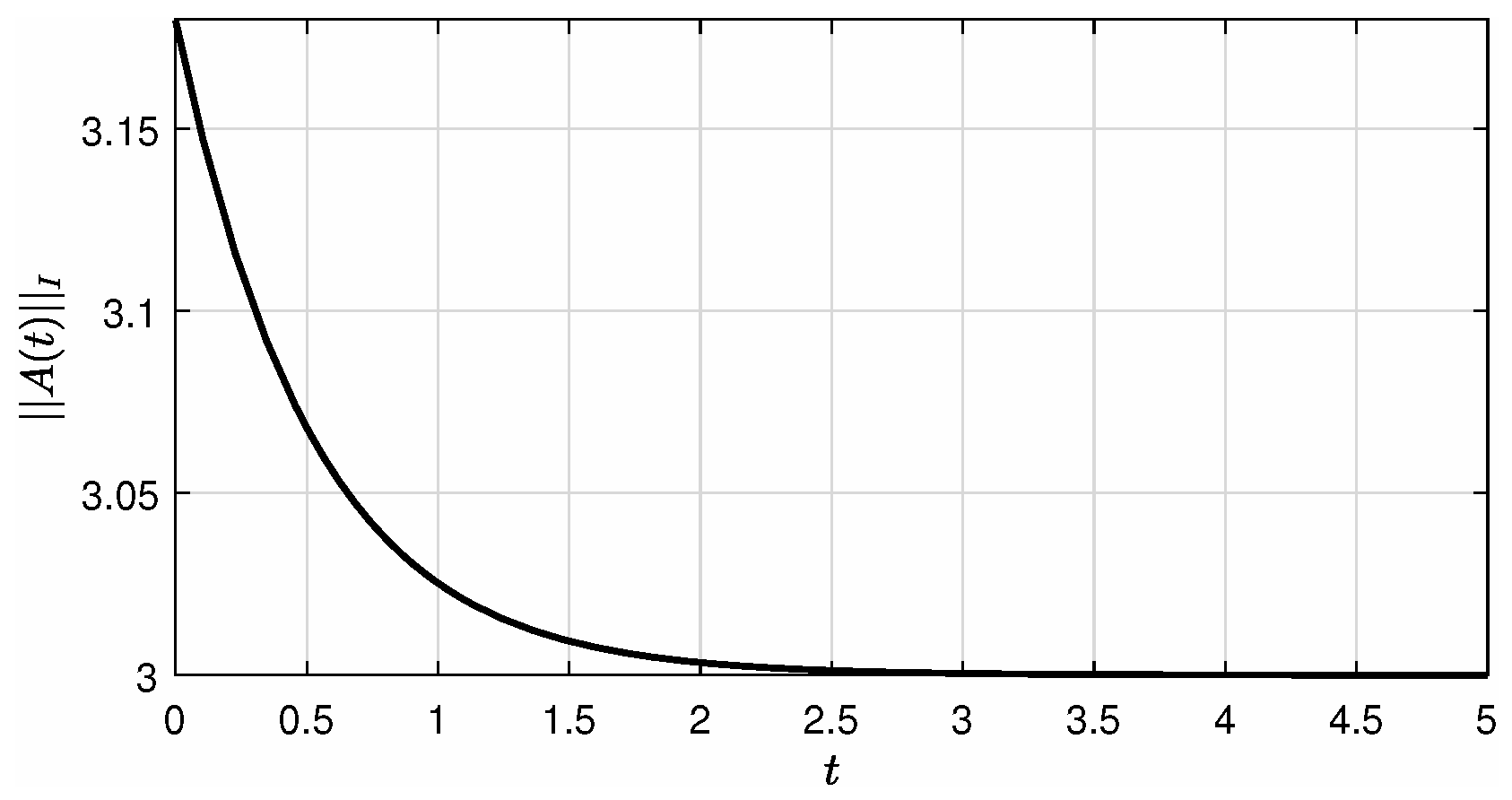
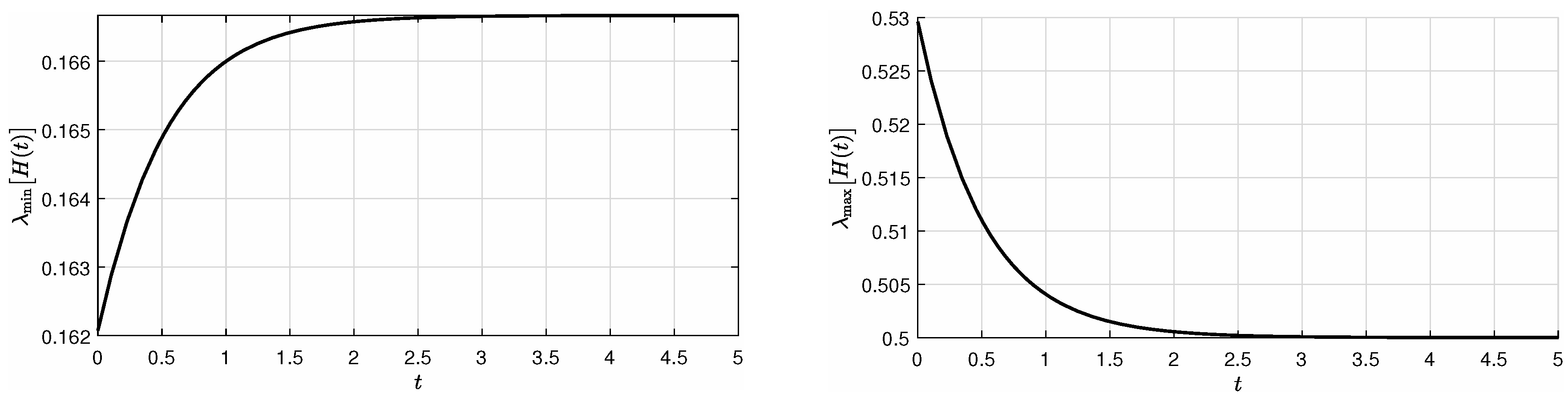
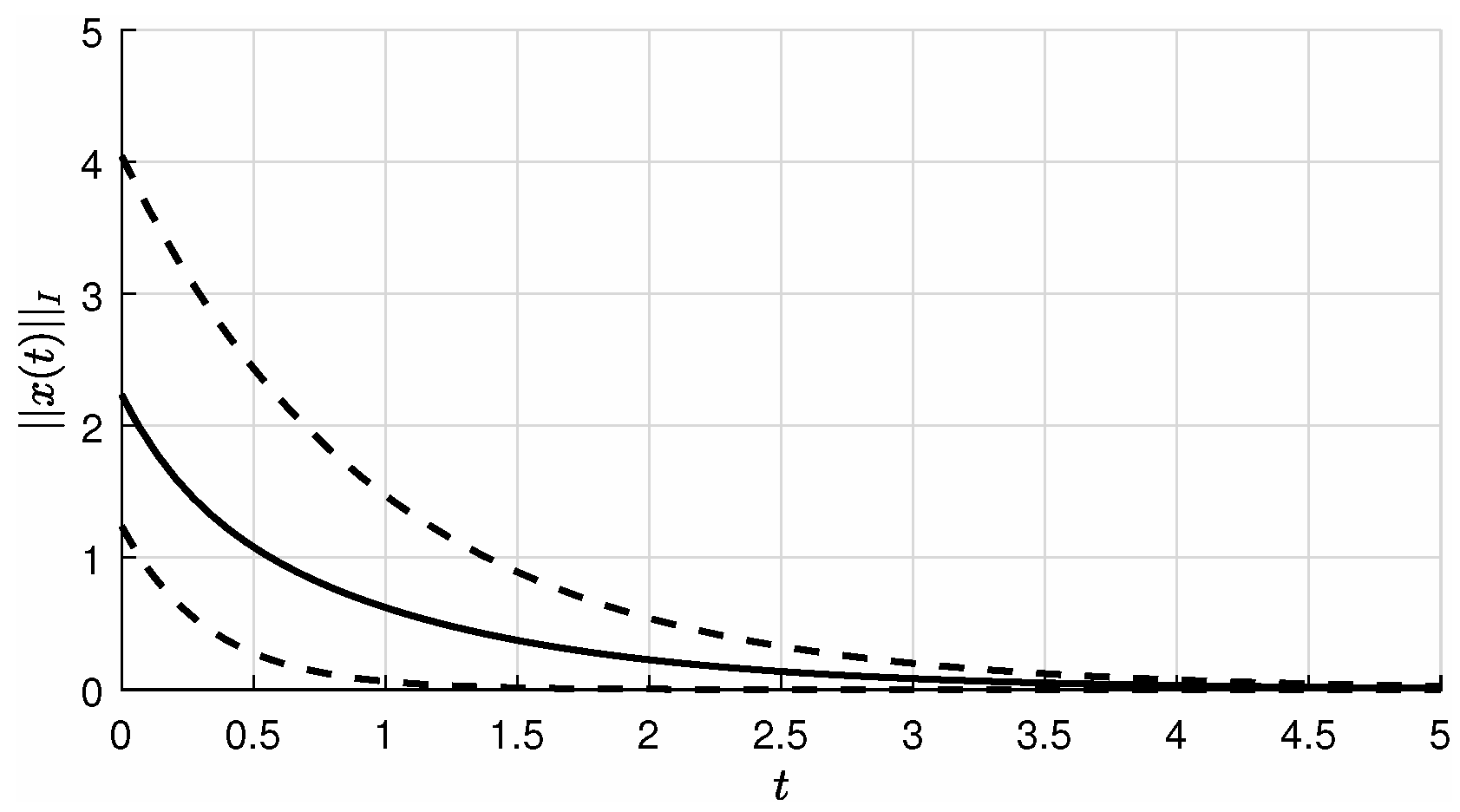
3. Simulation Results
4. Conclusions
Funding
Conflicts of Interest
References
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
- Chicone, C. Ordinary Differential Equations with Applications; (Texts in Applied Mathematics); Springer: New York, NY, USA, 1999; Volume 34. [Google Scholar]
- Rugh, W.J. Linear System Theory, 2nd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Coppel, W.A. Stability and Asymptotic Behavior of Differential Equations; D. C. Heath and Company: Boston, MA, USA, 1965. [Google Scholar]
- Hu, G.-D.; Liu, M. The weighted logarithmic matrix norm and bounds of the matrix exponential. Linear Algebra Appl. 2004, 390, 145–154. [Google Scholar] [CrossRef] [Green Version]
- Zhou, B. On asymptotic stability of linear time-varying systems. Automatica 2016, 68, 266–276. [Google Scholar] [CrossRef]
- Afanas’ev, V.N.; Kolmanovskii, V.B.; Nosov, V.R. Mathematical Theory of Control Systems Design; Originally published by Kluwer Academic Publishers in 1996; Springer Science+Business Media: Dordrecht, The Netherlands, 1996. [Google Scholar]
- Dekker, K.; Verwer, J.G. Stability of Runge-Kutta Methods for Stiff Nonlinear Differential Equations; North-Holland: Amsterdam, The Netherlands, 1984. [Google Scholar]
- Desoer, C.A.; Haneda, H. The Measure of a Matrix as a Tool to Analyze Computer Algorithms for Circuit Analysis. IEEE Trans. Circuits Theory 1972, 19, 480–486. [Google Scholar] [CrossRef]
- Lohmiller, W.; Slotine, J.-J.E. On contraction analysis for non-linear systems. Automatica 1998, 34, 683–696. [Google Scholar] [CrossRef] [Green Version]
- Rüffer, B.S.; van de Wouw, N.; Mueller, M. Convergent systems vs. incremental stability. Syst. Control Lett. 2013, 62, 277–285. [Google Scholar]
- Harville, D.A. Matrix Algebra From a Statistician’s Perspective; Springer: New York, NY, USA, 2008. [Google Scholar]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Goh, B.S. Global stability in many-species systems. Am. Nat. 1977, 111, 135–143. [Google Scholar] [CrossRef]
- Coddington, E.A.; Levinson, N. Theory of Ordinary Differential Equations; McGraw-Hill: New York, NY, USA, 1955. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vrabel, R. Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems. Mathematics 2020, 8, 915. https://doi.org/10.3390/math8060915
Vrabel R. Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems. Mathematics. 2020; 8(6):915. https://doi.org/10.3390/math8060915
Chicago/Turabian StyleVrabel, Robert. 2020. "Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems" Mathematics 8, no. 6: 915. https://doi.org/10.3390/math8060915