1. Introduction
Admissible perturbation theory is a direction of research which unifies the main aspects of iterative approximating. The theory of admissible perturbations of an operator introduced by Rus in [
1] opens a new direction of research and unifies major aspects of the iterative approximation of fixed point for single valued self operators. The admissible perturbation of a nonlinear operator was studied in detail in [
2] and extended for the generalized pseudocontractive operators by Berinde, Khan and Fukhar-ud-din [
3].
Demicontractive operators are still a very recent object of study [
4,
5,
6]. In [
6] the authors solve split common fixed point problems for demicontractive mappings in Hilbert spaces as an extension of the Halpern type algorithm from [
7] to a viscosity iteration. In [
8] are shown the approximated solutions for variational inequalities in terms of admissible perturbations. Furthermore, in [
9] a weak convergence theorem in Hilbert spaces using admissible perturbations is introduced. A standard approach for admissible perturbations of demicontractive operators is provided in [
10].
Difficult problems needs highly-efficient algorithms to obtain feasible results. Nowadays, Ant Colony Optimization (ACO) [
11,
12] is a successfully probabilistic technique for solving complex problems as routing, assignment, scheduling problems [
13,
14,
15,
16] and some generalized versions as [
17,
18,
19]. In 2019 Chowdhury did a case study with drones for wildlife surveillance [
20].
In order to solve the image edge detection, a problem of identifying discontinuities in brightness and therefore enhancing edges of objects in an image, different ant algorithms were involved during last years. From the most recent ones, Shi et al. [
21] with Canny Edge and ACO, make use of a fuzzy triangle membership function in the neighborhood of the gray value, and Mahalingam and Subramoniam [
22] used ACO for an optimized object detection and tracking.
In [
23] ACO is implemented by the memristor crossbar array and uses parallel computing; threshold generates edges as mean of the final conductance matrix; the results are comparatively better than neural networks models and while using Sobel operator. A recent survey on nature-inspired medical image in biomedical data [
24] includes the behavior of swarm intelligence. In order to combine capabilities of several independent exact or meta-heuristics, an integrative cooperative search framework was proposed in [
25].
As a part of swarm intelligence heuristics categories, ant colonies algorithms are inspired by real ants’ behavior in finding shortest paths while using as information the trail of a chemical substance, deposited by ants, called pheromone. Ants pheromone sensitivity was proposed in [
26,
27]; in order to process medical images, Pintea and Ticala proposed the first theoretical ACO approach involving pheromone sensitivity in [
28].
A heuristic value making use of two admissible perturbation operators was applied in [
29] to a demicontractive mapping in order to solve the image edge detection problem with ACO. The current work makes a step forward and uses admissible perturbations of demicontractive mappings as test functions. The agents have different roles in the image edge detection: some are explorers, and others exploiters; in time they change their roles based on the environment dynamics.
The paper is further structured as follows. Methodologies including a preview of the theory of admissible perturbations and the Ant Colony Optimization are described in
Section 2. The case study of the ACO algorithm for edge detection in medical images, with all processes involved from initialization to the decision follows in
Section 3. Further,
Section 4 includes: experimental results and comparison of ant-based algorithms and operators involved, the representation of results medical images, statistical analysis and final discussions. The paper concludes in a positive manner, as the proposals of the current work obtain promising results for the tested set of the medical images.
3. Case Study: ACO Algorithm for Edge Detection in Medical Images
The proposed edge detection algorithm uses artificial ants which move in a bi-dimensional image in order to build the pheromone matrix, each element of the matrix represents the edge information for every pixel in the image. The new ant technique starts with the initialization process, runs for N construction steps when it creates and updates pheromone matrix and at last, performs the decision process to determine the edge.
- —
Initialization process. In the initialization process, all the K ants are placed randomly on the image. Each pixel of the image is viewed as a node. Each value of the initial pheromone matrix is set to a constant . A constant value L used to define the number of movement steps in the construction process is defined.
- —
Construction process. At the
n-th construction step, one ant is randomly chosen from all
K ants, this ant will be consecutively moving for
L movement steps. The ant will move from node
i to
j based on the transition probability, Equation (
9).
There are two main aspects in the construction process.
First, it is the issue of establishing the heuristic
from Equation (
9).
The second issue is to establish the domain in which one ant found in node
can make moves, i.e.,
from Equation (
9).
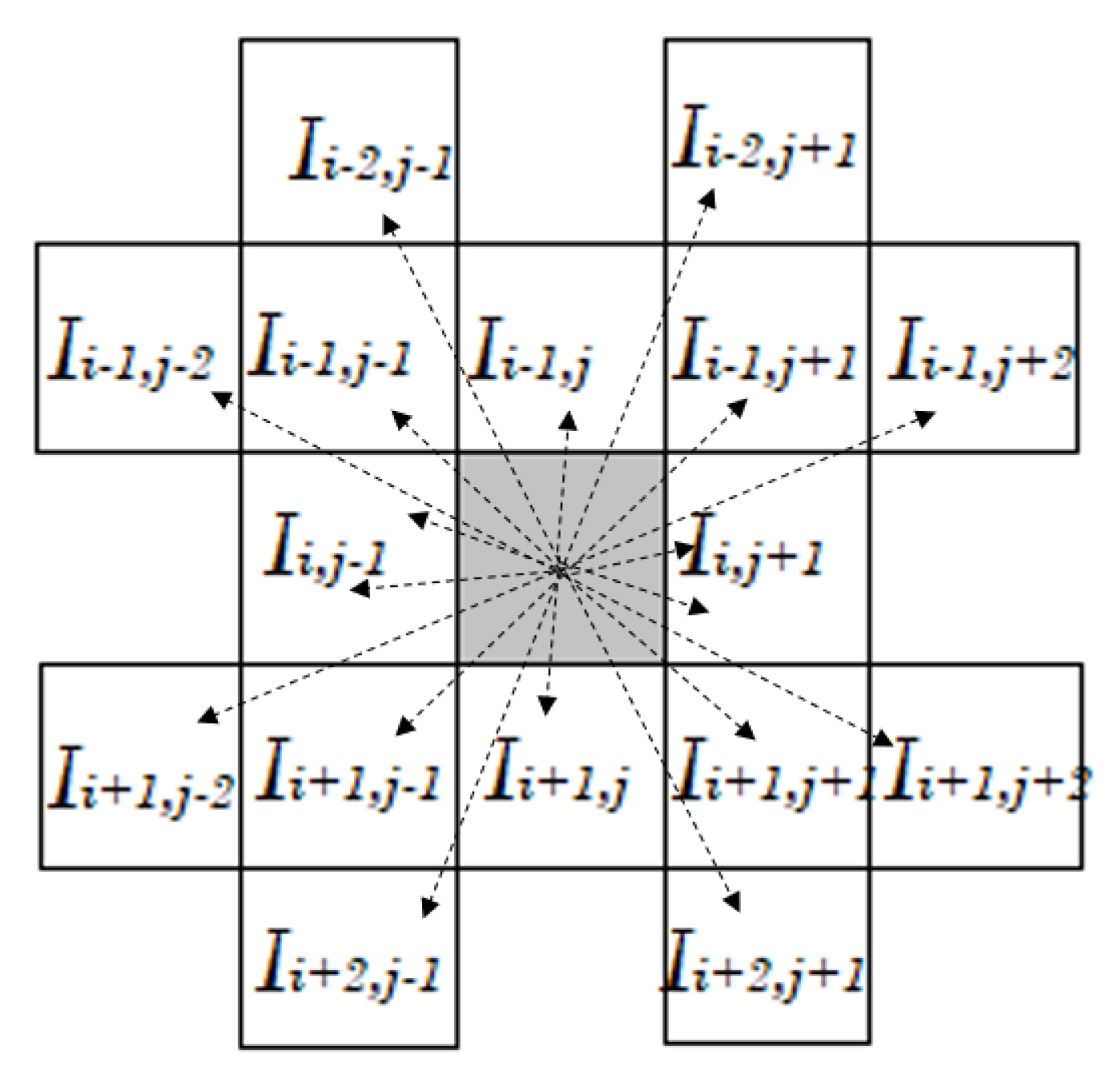
The connectivity domain is based on the matrix notation of neighbors nodes: the 8-connectivity domain, the eight closest neighbors of
gray square from
Figure 1. We propose to compute the heuristic value based on the local statistic of the pixel
, Equation (
12) where
, is a normalization factor,
is the intensity value of the pixel at the position
from the image, the function
is a function which processes
called “clique”, defined in [
32], as in
Figure 1.
The value of
depends on the variation of image’s intensity values on
. More specifically, the value of
at the pixel
is considered in Equation (
13).
As prerequisites for operators,
, is defined as in Equation (
14) and
as in Equation (
15).
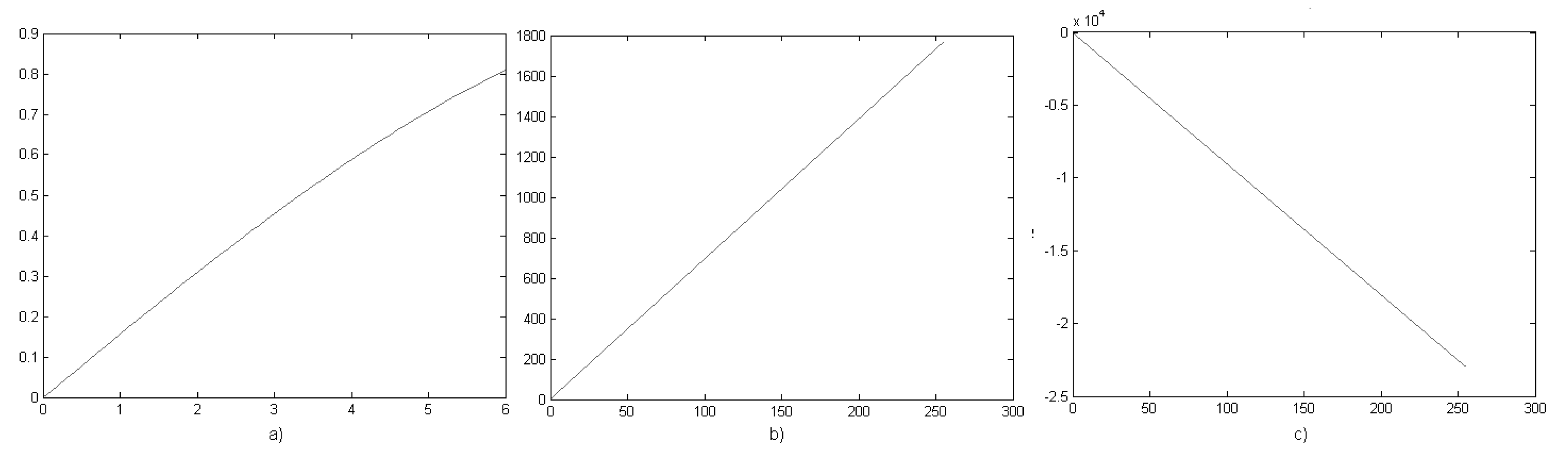
The considered operators for
from Equation (
13) are illustrated in
Figure 2 and further detailed.
The parameter
from Equation (
16) adjusts the shape of the operators. This operator is the same test function used in [
32]. The research on admissible perturbations of demicontractive operators, by using Krasnoselskij perturbation on the demicontractive mapping Equation (
2), lead us to define the
-operator, Equation (
17). The proposed
-operator can be used in the same way as the other operators when constructing heuristic value during ACO.
Another proposal included is the admissible perturbation operator, the
,
-operator based on [
1] and described by Equation (
7). The
,
-operator from Equation (
18) is an admissible perturbation operator obtained by applying the function
defined by Equation (
14), to the demicontractive mapping, Equation (
2).
- —
Update process. The algorithm uses two update operations for the pheromone matrix.
- –
First update is made as in Equation (
10) after each ant moves within each construction step. Each element of the matrix is updated.
- –
The second update is made after the movement of all ants within each construction step, Equation (
11).
- —
Decision process
At this point of the algorithm, a binary decision is made for each pixel in order to establish if it is edge or not, by applying a threshold
T on the final pheromone matrix
. The threshold is computed as stated in [
33].
4. Results and Discussion
The section includes description of the experiments in
Section 4.1, representation of the results in
Section 4.2, statistical analysis
Section 4.3 and related discussions about ant-based algorithm.
4.1. Experimental Results
Experimental work for is further described in detail.
- A.
Preliminary settings for Ant Colony Optimization:
- —
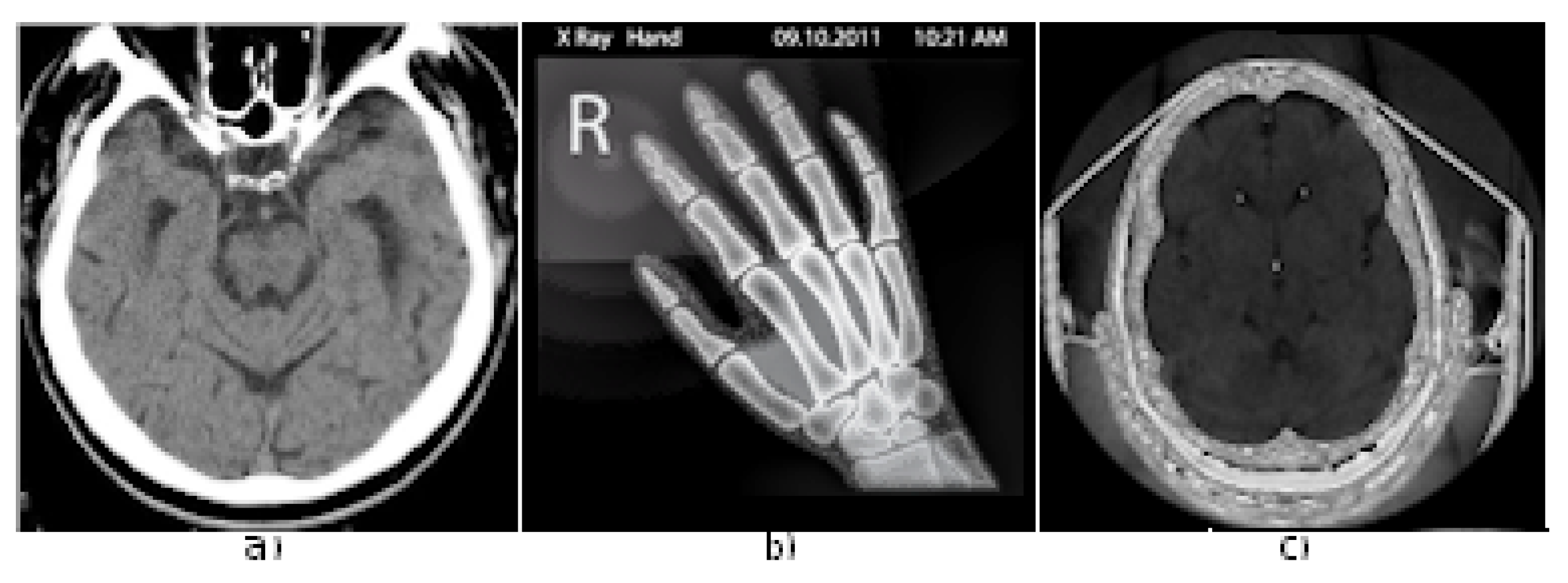
Data-set. The experimental data set includes the medical images for the experiments as in
Figure 3. The current study makes use of four medical images, as shows
Figure 3. The medical image
Brain CT with 128 × 128 resolution could be provided for free by request from authors for scientific reasons;
Hand X-ray from [
34] with original 225 × 225 resolution was reduced to 128 × 128 resolution to make a valid comparison with the other images, as
Head CT from [
35] has originally also 128 × 128 resolution; these two medical-images are available online for free.
- —
Software used. The ACO-based edge detection approach was implemented using MatLab and run on a computer with an AMD Rysen 5 2500U, 2 GHz processor.
- —
Parameter settings for Ant Colony Optimization.
The majority of parameters values used are based on [
32].
Figure 4 illustrates the way we tested the parameters:
and
for
,
and
operators on all data-set of medical images: Brain CT, Hand X-ray and Head CT. As a result we used the best parameters found during tests.
- —
Parameters considered for Ant Colony Optimization
- –
the number of ants is based on the dimension of the image : where ⌊ and ⌋ are the left and right rounded values to the nearest integers less than or equal to x; for the particular case of the image resolution, 128 is the number of ants.
- –
each ant makes 300 movements in each of the steps; therefore in the particular case of 128 ants, 38,400 movements are made during each of the L steps.
- –
the connectivity neighborhood
is based on the ant’s movement range in Equation (
9);
- –
the value of each component of the pheromone matrix, ;
- –
weighting factors of the pheromone information,
and heuristic information,
, in Equation (
9);
- –
the evaporation rate,
, Equation (
10);
- –
the pheromone decay coefficient,
= 0.001, Equation (
11);
- –
the adjusting factor of the functions,
, as in Equations (
16)–(
18);
- –
tolerance used in the decision process of the proposed method.
- –
termination criteria is given by reaching the maximal number of steps L.
- B.
Numerical results and running time:
- —
ACO Numerical Results.Table 1 shows that more pixels are correctly identified on the edge of the image, more precise is the edge detection of an medical image. The results are decimal scaled, and are standard values of correctly identified edges with values in the unit interval for an accurate visibility.
- —
ACO Running Time. Based on the computing characteristics, the average running time was 4500 seconds for each medical image. Furthermore, the running time increases as Denoise Convolutional Neural Network (DnCNN) to enhance each image as follows.
- C.
Software:
- —
We make use of the Tian et al. [
32] software from the 2008 CEC conference, an image edge detection using Ant Colony Optimization MatLab software [
36]. The existing software was at first modified for the use of the operators from [
32] and described in Equation (
16) (
Sin-operator) and the proposed operators given in Equation (
17) (
KH-operator) and Equation (
18) (
Chi-operator).
- —
Denoise Convolutional Neural Network (DnCNN) a pretrained network [
37] is used to improve the quality of the resulting medical image. Image Processing Toolbox and Deep Learning Toolbox from Matlab are used.
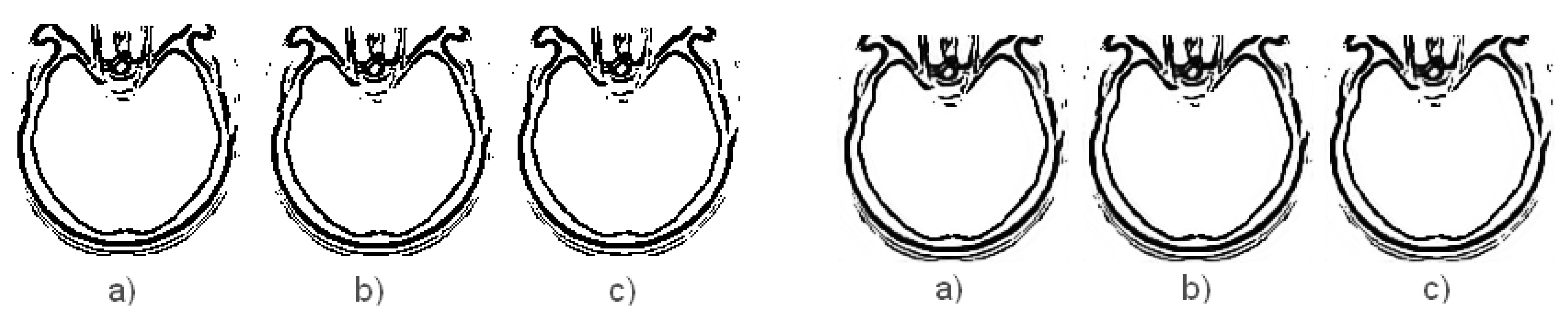
4.2. Representation of Results
The following is the representation of medical images provided with identified edges on the data-set of medical images using each considered operator from Equations (
16)–(
18).
Figure 5,
Figure 6 and
Figure 7 show respectively the Brain CT, Hand X-ray and Head CT results of all considered operators when using Ant Colony Optimization before and after Denoise Convolutional Neural Network (DnCNN).
4.3. Discussions
The main purpose of the current work is to study how the proposed operators influence the results of the edge detection problem; thus, the impact during ACO solver is discussed. Furthermore the influence of using the Denoise Convolutional Neural Network (DnCNN) for the quality of the final medical images is presented.
Table 2 with the results of ACO and its specified operators when image edge detection problem is solved shows the following: the highest values for means,
is obtained for
and the same for the lowest best value
. Nevertheless,
for edge detection shows its robustness as with the
operator provides the lowest values for deviations results: standard deviations
for the average absolute deviation from median
. The
operator shows stability during testing.
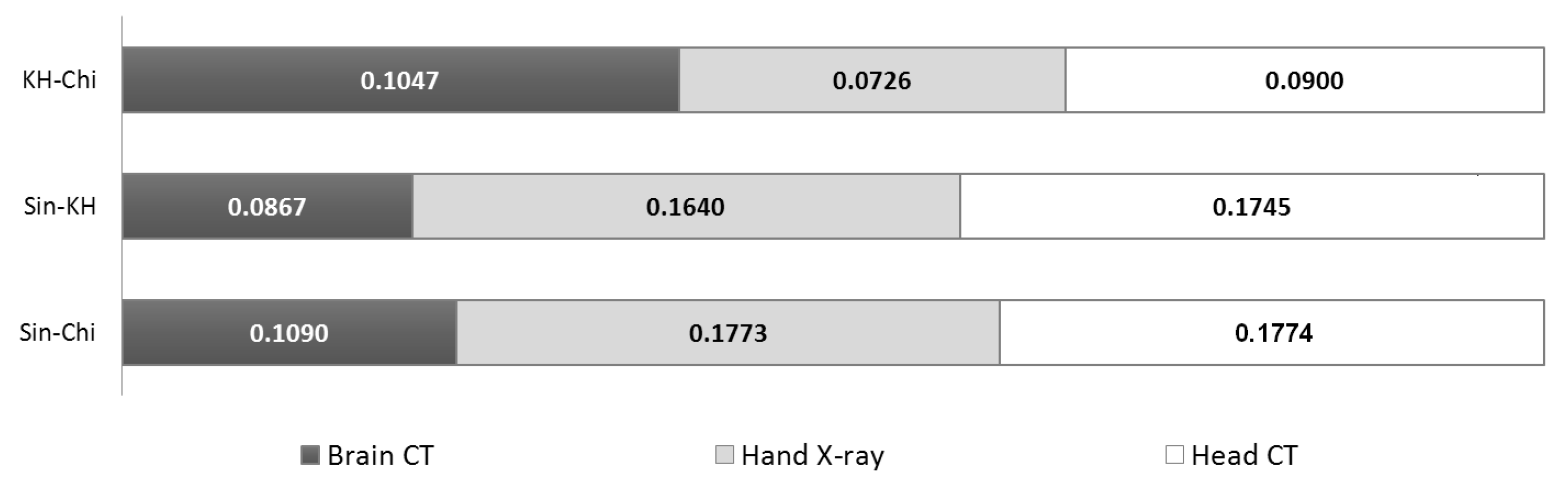
In order to compare ACO operators’ results we make use of a similarity test. The higher similarity is shown by the smaller value. As similarity, the norm of images differences, the
norm() function from MatLab is considered.
Table 3 and
Figure 8 illustrate similarities when comparing the similarities between ACO operators:
Sin,
KH and
Chi.
The most similar operators are and -operator with the two lowest values out of the three medical image results, for Hand X-ray and for Head CT. Less similar operators are and .
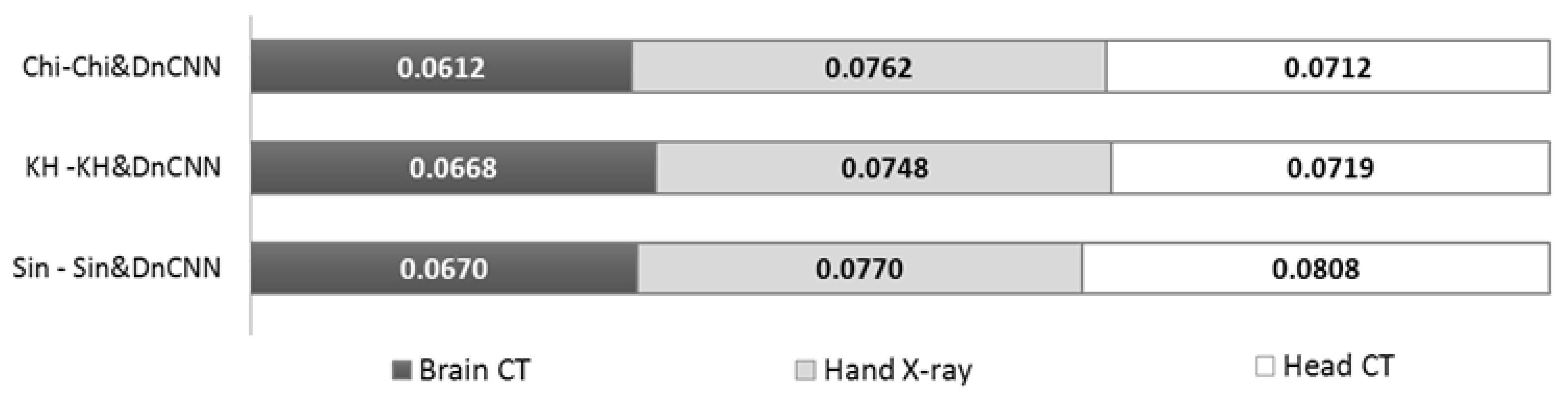
Table 4 and
Figure 9 illustrate the medical image similarities within the initial ACO methods and after using the pretrained Denoise Convolutional Neural Network (DnCNN) [
37].
The most efficient operator, , obtains the least changed image after DnCNN for Brain CT, value. The less efficient in this case was the operator for Head CT, .
Table 5 shows the ranks of operators when using Ant Colony Optimization to identify medical edges and the most similar are
and
.
As the results suggested, the main advantages of the operators are the following:
The
operator has the results similar with the
operator, so between
and
,
operator performs better for image edge detection with ACO (
Table 5).
operator provides the best results for standard deviations and the average absolute deviation from median when compared with
and
operators The
operator keeps its stability during all the tests including with DnCNN (
Table 2 and
Table 5).
The best paper results is that the newly introduced operators
and
preserve better the edges of the medical image during the image denoising process with DnCNN (
Table 5).
Overall, the medical images edges obtained with the considered ACO operators shows reliability.
5. Conclusions
The health of people will be always a priority. In order to find out faster and with a high precision bone injuries within medical images, frequently made through X-rays, different types of software were implemented. Here, the meta-heuristic Ant Colony Optimization, ACO is used to identify edges of medical images. The current study introduces two new operators. One of the proposals is the
-operator based on the Krasnoselskij admissible perturbation of a demicontractive operator. The other one, is the admissible perturbation operator, the
,
-operator obtained by applying a function
to an demicontractive mapping as specified by Rus in his work [
1].
The use of different operators enhance the solution of the image edge detection problem. The motivation of the study was to see the behavior of demicontractive operators in edge detection algorithms, in particular with ACO. The results show the beneficent stability of the ACO operators and especially when using Denoise Convolutional Neural Network, DnCNN, to obtain medical images. An analysis is provided for both perspectives based on the imaged edge detection problem results: from operators perspective for ACO with and without using DnCNN denoise technique.
The promising results of the proposed operators could further empower other techniques, in order to identify better solutions not only just for medical image edge detection but as well as for other similar difficult problems. The study hopefully opens new directions for further studies in this area.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}