Preview Control for MIMO Discrete-Time System with Parameter Uncertainty


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
- (i)
- The output tracks the reference signal without steady-state error, that is,where .
- (ii)
- The closed-loop system is robustly stable and exhibits acceptable transient responses for all .
3. Derivation of AES
4. PC Design
4.1. State Feedback PC
4.2. Static Output Feedback PC
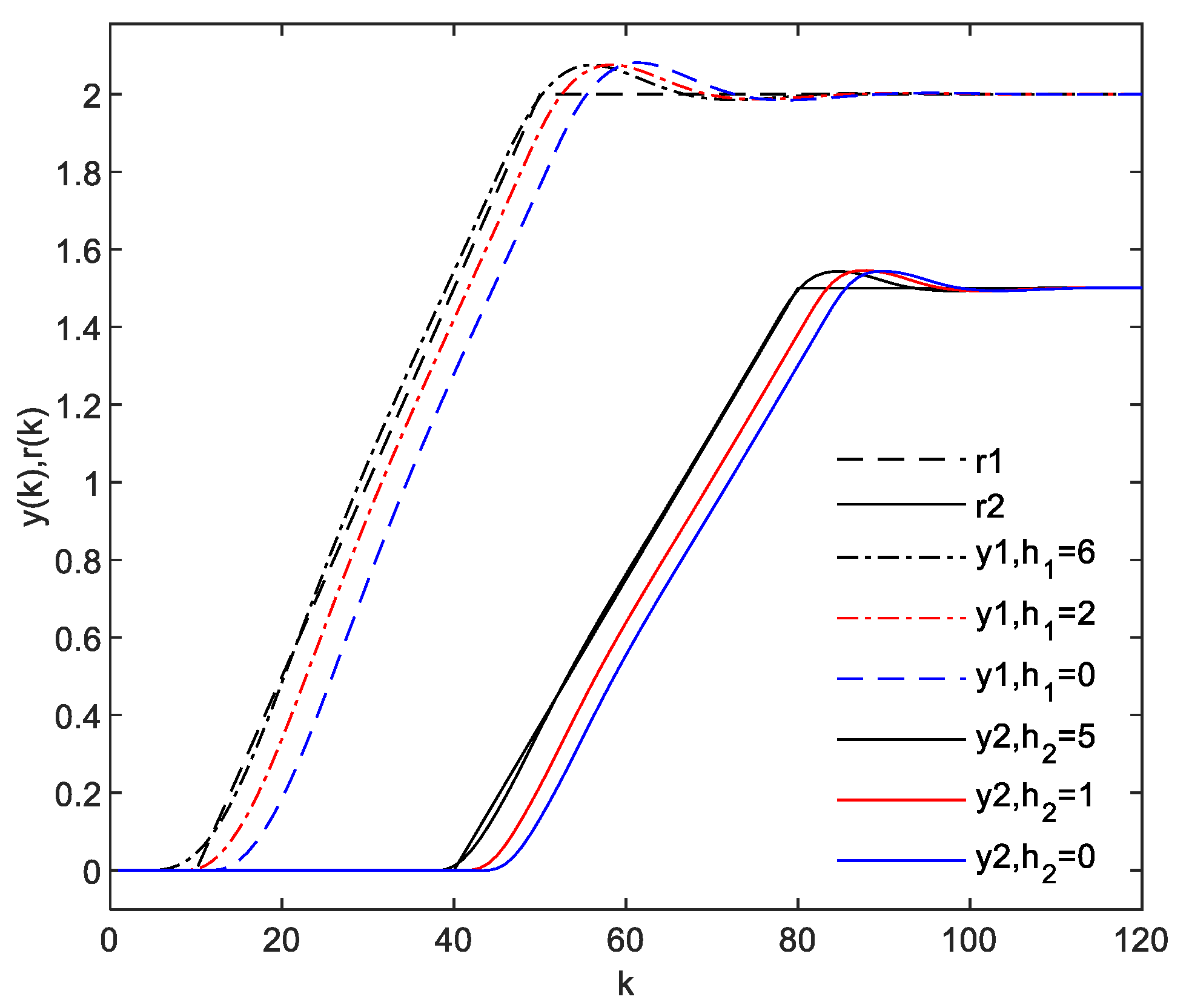
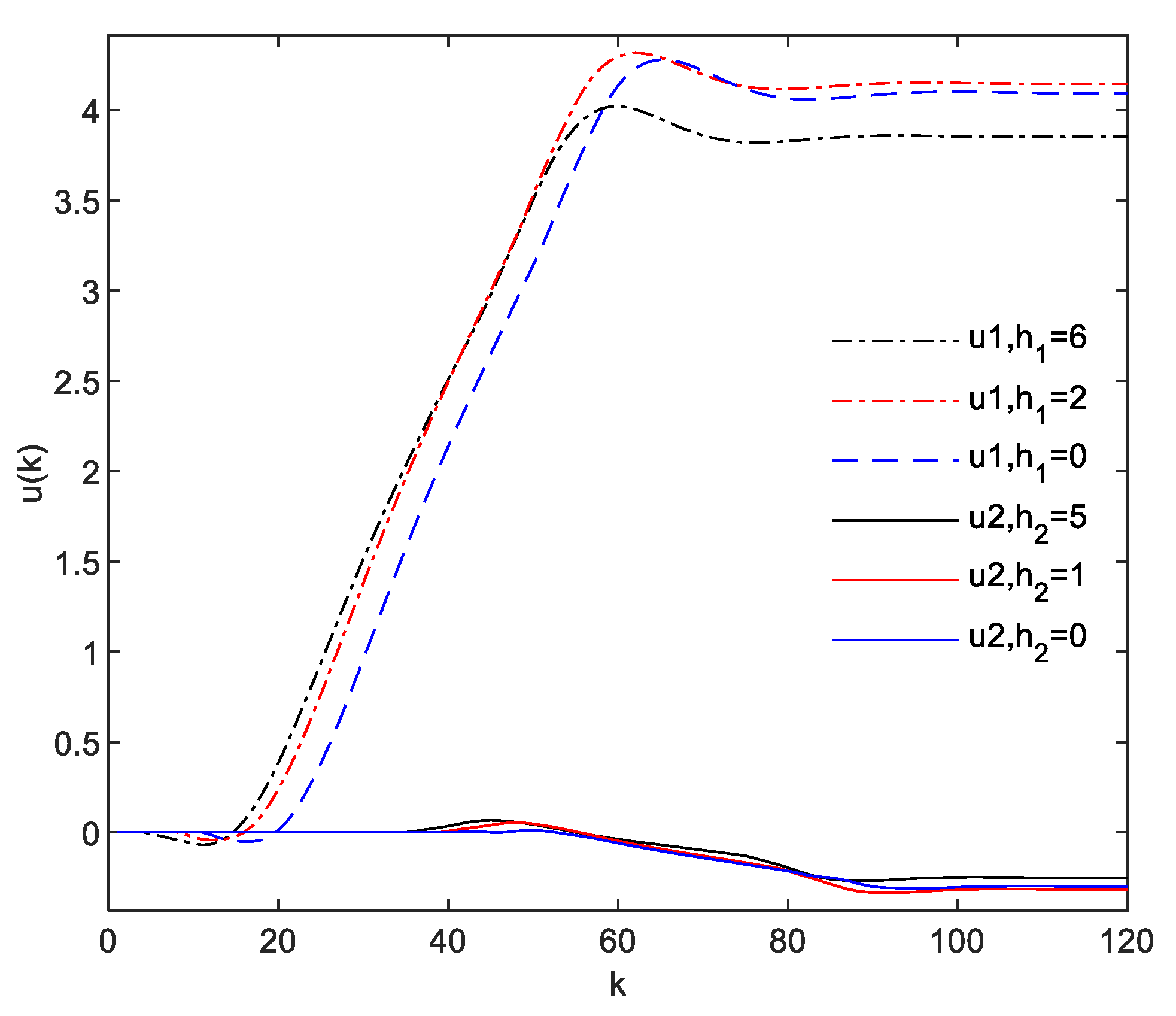
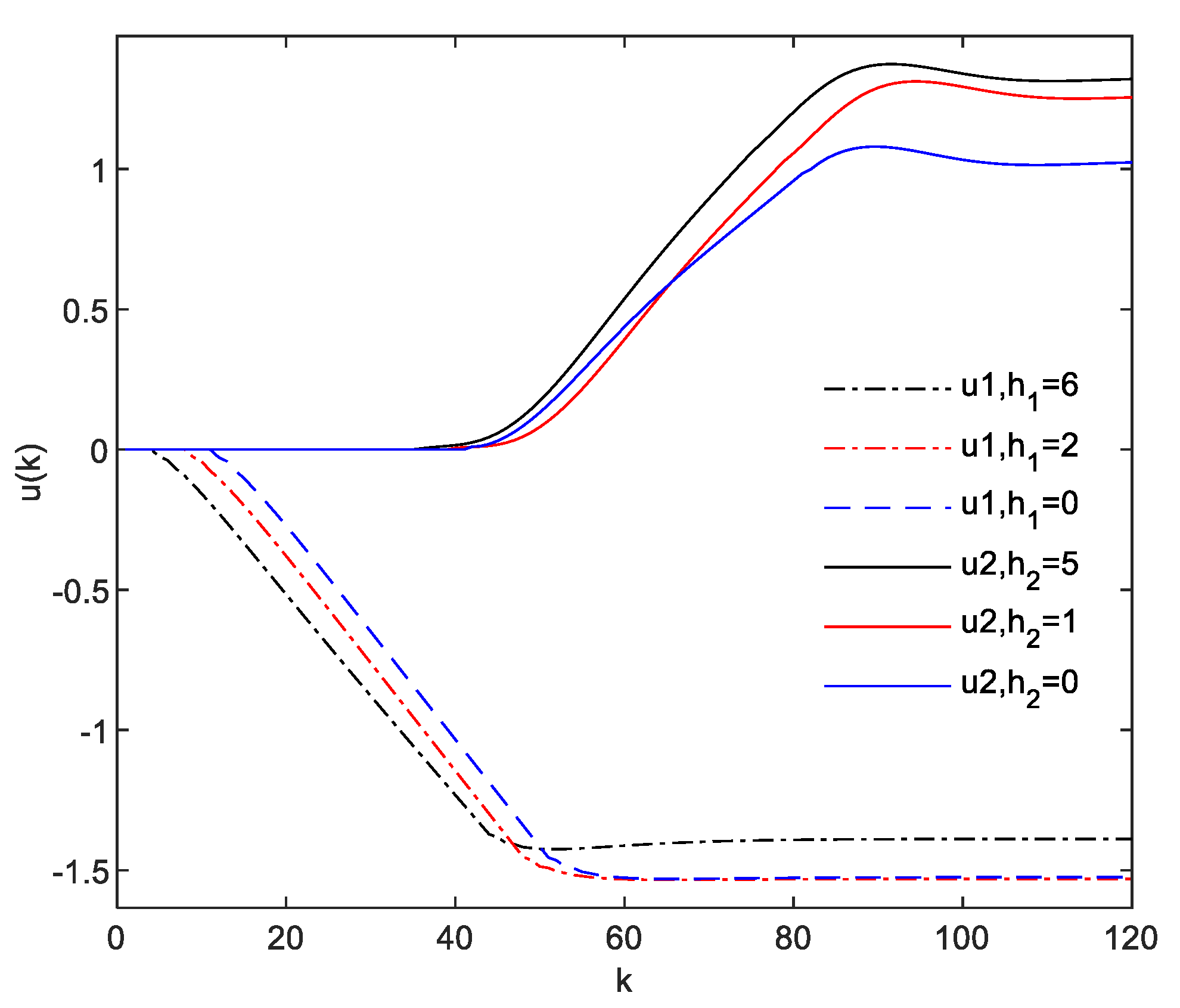
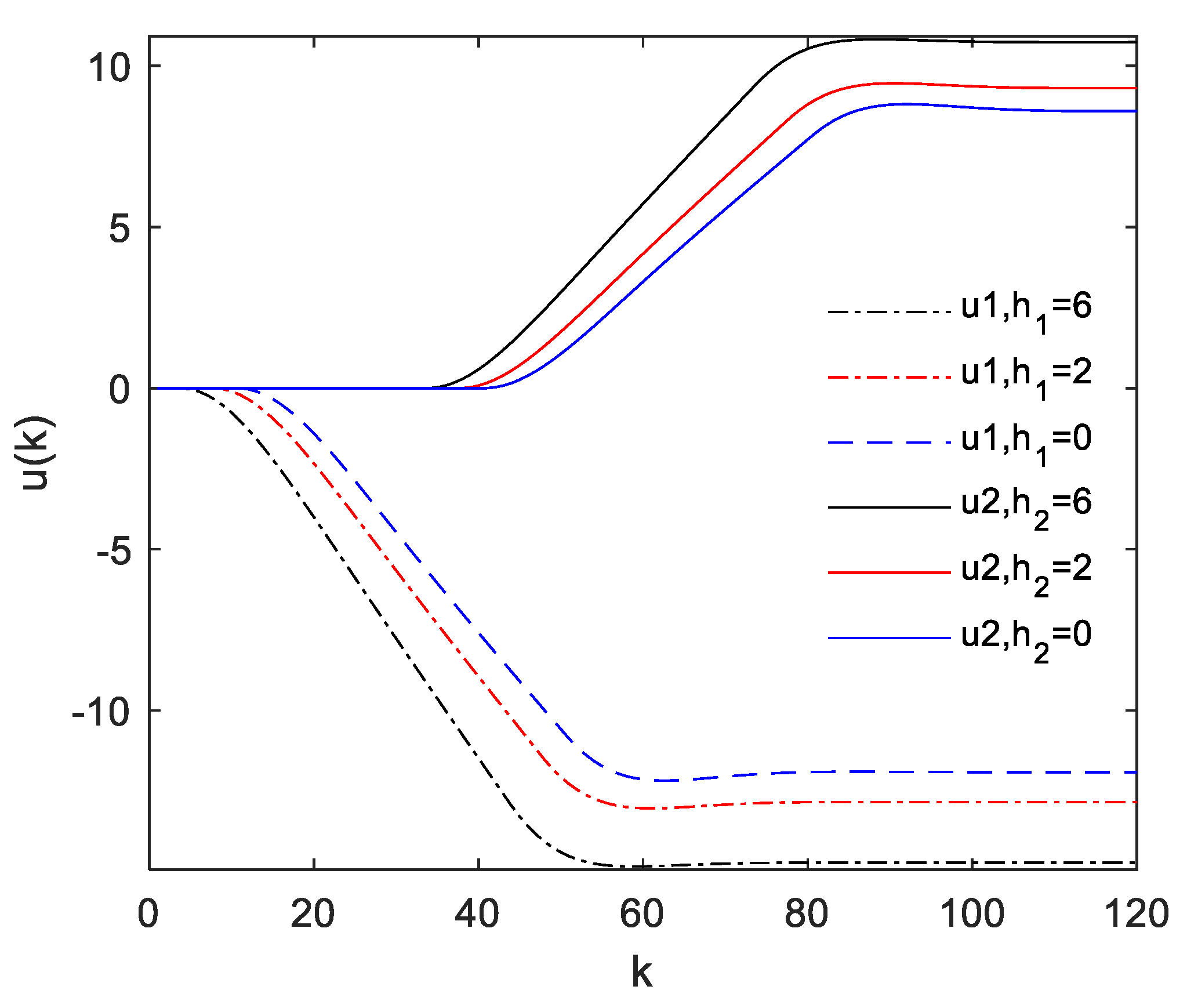
5. Numerical Example
Output Feedback Case
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zheng, D.Z. Linear System Theory; Tsinghua University Press: Beijing, China, 2012. [Google Scholar]
- Tan, K.K.; Zhao, S.; Xu, J.X. Online automatic tuning of a proportional integral derivative controller based on an iterative learning control approach. IET Control Theory A 2007, 1, 90–96. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, S.; He, W.; Lu, R. Adaptive finite-time tracking control of full state constrained nonlinear systems with dead-zone. Automatica 2019, 100, 99–107. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, R.; Xie, X.; Zhang, H. Observer-based H∞ fuzzy control for modified repetitive control. Neurocomputing 2018, 286, 141–149. [Google Scholar] [CrossRef]
- Birla, N.; Swarup, A. Optimal preview control: A review. Optim. Control Appl. Methods 2015, 36, 241–268. [Google Scholar] [CrossRef]
- Zhen, Z.Y. Research development in preview control theory and applications. Acta Autom. Sin. 2016, 42, 172–188. [Google Scholar]
- Sheridan, T.B. Three models of preview control. IEEE Trans. Hum. Factors Electron. 1996, 7, 91–102. [Google Scholar] [CrossRef]
- Bender, E.K. Optimum linear preview control with application to vehicle suspension. J. Basic Eng. 1968, 90, 213–221. [Google Scholar] [CrossRef]
- Tomizuka, M. Optimal continuous finite preview problem. IEEE Trans. Autom. Control 1975, 20, 362–365. [Google Scholar] [CrossRef]
- Tomizuka, M. Optimal discrete finite preview problem (Why and how is future information important?). J. Dyn. Syst. ASME 1975, 97, 319–325. [Google Scholar] [CrossRef]
- Katayama, T.; Ohki, T.; Inoue, T.; Kato, T. Design of an optimal controller for a discrete-time system subject to previewable demand. Int. J. Control 1985, 41, 677–699. [Google Scholar] [CrossRef]
- Katayama, T.; Hirono, T. Design of an optimal servomechanism with preview action and its dual problem. Int. J. Control 1987, 45, 407–420. [Google Scholar] [CrossRef]
- Tsuchiya, T.; Egami, T. Digital Preview and Predictive Control; Beijing Science and Technology Press: Beijing, China, 1994. [Google Scholar]
- Wu, J.; Liao, F.; Tomizuka, M. Optimal preview control for a linear continuous-time stochastic control system in finite-time horizon. Int. J. Syst. Sci. 2017, 48, 129–137. [Google Scholar] [CrossRef]
- Wang, D.; Liao, F.; Tomizuka, M. Adaptive preview control for piecewise discrete-time systems using multiple models. Appl. Math. Model 2016, 40, 9932–9946. [Google Scholar] [CrossRef]
- Lu, Y.; Liao, F.; Deng, J.; Pattinson, C. Cooperative optimal preview tracking for linear descriptor multi-agent systems. J. Frankl. Inst. 2019, 356, 908–934. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Liao, F.; Deng, J.; Liu, H. Cooperative global optimal preview tracking control of linear multi-agent systems: An internal model approach. Int. J. Syst. Sci. 2017, 48, 2451–2462. [Google Scholar] [CrossRef] [Green Version]
- Running, K.D.; Martins, N.C. Optimal preview control of Markovian jump linear systems. IEEE Trans. Autom. Control 2009, 54, 2260–2266. [Google Scholar] [CrossRef]
- Liao, F.; Wang, Y.; Lu, Y.; Deng, J. Optimal preview control for a class of linear continuous-time large-scale systems. Trans. Inst. Meas. Control 2018, 40, 4004–4013. [Google Scholar] [CrossRef] [Green Version]
- Bidyadhar, S.; Ogeti, P.S. Optimal preview stator voltage-oriented control of DFIG WECS. IET Gener. Transm. Distrib. 2018, 12, 1004–1013. [Google Scholar]
- Kojima, A. H∞ controller design for preview and delayed systems. IEEE Trans. Autom. Control 2015, 60, 404–419. [Google Scholar] [CrossRef]
- Gershon, E.; Shaked, U. H∞ preview tracking control of retarded state- multiplicative stochastic systems. Int. J. Robust Nonlinear Control 2014, 24, 2119–2135. [Google Scholar] [CrossRef]
- Kristalny, M.; Mirkin, L. On the H2 two-sided model matching problem with preview. IEEE Trans. Autom. Control 2012, 57, 207–212. [Google Scholar] [CrossRef]
- Hamada, Y. Preview feedforward compensation: LMI synthesis and flight simulation. IFAC-Pap. 2016, 49, 397–402. [Google Scholar] [CrossRef]
- Li, L.; Liao, F. Robust preview control for a class of uncertain discrete-time systems with time-varying delay. ISA Trans. 2018, 73, 11–21. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Yuan, Y. Output feedback preview control for polytopic uncertain discrete-time systems with time-varying delay. Int. J. Robust Nonlinear Control 2019, 29, 2619–2638. [Google Scholar] [CrossRef]
- Shao, Y.-F.; Gao, S.-J. Robust preview control of uncertain discrete systems based on an internal model approach. Sci. Technol. Vis. 2018, 1–3. [Google Scholar] [CrossRef]
- Lan, Y.; Xia, J. Observer based design of preview repetitive control for linear discrete systems. Comput. Integr. Manuf. Syst. 2019, 1–18. [Google Scholar]
- Lan, Y.; Xia, J.; Shi, Y. Robust guaranteed-cost preview repetitive control for polytopic uncertain discrete-time systems. Algorithms 2019, 12, 20. [Google Scholar] [CrossRef] [Green Version]
- Han, K.; Feng, J.; Li, Y.; Li, S. Reduced-order simultaneous state and fault estimator based fault tolerant preview control for discrete-time linear time-invariant systems. IET Control Theory A 2018, 12, 1601–1610. [Google Scholar] [CrossRef]
- Han, K.; Feng, J. Data-driven robust fault tolerant linear quadratic preview control of discrete-time linear systems with completely unknown dynamics. Int. J. Control 2019, 1–11. [Google Scholar] [CrossRef]
- Yu, X.; Liao, F. Preview tracking control for a class of discrete-time Lipschitz non-linear time-delay systems. IMA J. Math. Control Inf. 2019, 36, 849–867. [Google Scholar] [CrossRef]
- Lio, W.H.; Jones, B.L.; Rossiter, J.A. Preview predictive control layer design based upon known wind turbine blade-pitch controllers: MPC layer design based upon known blade-pitch controllers. Wind Energy 2017, 20, 1207–1226. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Cai, Y.; Song, Q. Energy control of plug-in hybrid electric vehicles using model predictive control with route preview. IEEE/CAA J. Autom. Sin. 2018, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Al Khudir, K.; Halvorsen, G.; Lanari, L.; De Luca, A. Stable torque optimization for redundant robots using a short preview. IEEE Robot. Autom. Lett. 2019, 4, 2046–2053. [Google Scholar] [CrossRef] [Green Version]
- Pak, H.A.; Shieh, R. On mimo optimal preview tracking control for known trajectory models. Optim. Control Appl. Methods 1991, 12, 119–130. [Google Scholar] [CrossRef]
- Li, L.; Liao, F. Parameter-dependent preview control with robust tracking performance. IET Control Theory Appl. 2017, 11, 38–46. [Google Scholar] [CrossRef]
- Chen, Y.; Fei, S.; Li, Y. Stabilization of neutral time-delay systems with actuator saturation via auxiliary time-delay feedback. Automatic 2015, 52, 242–247. [Google Scholar] [CrossRef]
- He, Y.; Wu, M.; She, J.-H. Improved bounded-real-lemma representation and H∞ control of systems with polytopic uncertainties. IEEE Trans. Circuits Syst. II Express Briefs 2005, 52, 380–383. [Google Scholar]
- Chang, X.H.; Zhang, L.; Park, H.P. Robust static output feedback H∞ control for uncertain fuzzy systems. Fuzzy Sets Syst. 2015, 273, 87–104. [Google Scholar] [CrossRef]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Liao, F. Preview Control for MIMO Discrete-Time System with Parameter Uncertainty. Mathematics 2020, 8, 756. https://doi.org/10.3390/math8050756
Li L, Liao F. Preview Control for MIMO Discrete-Time System with Parameter Uncertainty. Mathematics. 2020; 8(5):756. https://doi.org/10.3390/math8050756
Chicago/Turabian StyleLi, Li, and Fucheng Liao. 2020. "Preview Control for MIMO Discrete-Time System with Parameter Uncertainty" Mathematics 8, no. 5: 756. https://doi.org/10.3390/math8050756