Analytical Methods for Nonlinear Evolution Equations in Mathematical Physics


1
Mathematics Department, Faculty of Science, Taif University, P.O. Box 11099, Taif 21944, Saudi Arabia
2
Mathematics Department, Faculty of Science, Zagazig University, Zagazig 44519, Egypt
Mathematics 2020, 8(12), 2211; https://doi.org/10.3390/math8122211
Submission received: 5 November 2020
/
Revised: 1 December 2020
/
Accepted: 8 December 2020
/
Published: 13 December 2020
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:In this article, we will apply some of the algebraic methods to find great moving solutions to some nonlinear physical and engineering questions, such as a nonlinear (1 + 1) Ito integral differential equation and (1 + 1) nonlinear Schrödinger equation. To analyze practical solutions to these problems, we essentially use the generalized expansion approach. After various and options, we get several clear means of estimating the plentiful nonlinear physics solutions. We present a process like-direct expansion process-method of expansion. In the particular case of , in which and μ are arbitrary constants, we use the expansion process to build some new exact solutions for nonlinear equations of growth if it fulfills the decoupled differential equations.
1. Introduction
Nonlinear partial differential equations are statistical structures used to explain a phenomenon happening among us worldwide. In several applications of science and engineering, nonlinear partial differential equations occur. The same discovery of NPDEs has been carried out with several different algebraic methods (see [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35]). There are many authors searching for the oscillation criteria for NPDEs see [36]. Many applications of the nonlinear phenomena of PDEs are discussed in [37,38,39,40,41,42,43,44,45,46,47,48,49]. Yang et al. [45] have determined the lump solutions to NODEs using the bilinear equation with the logarithmic function. Zhang et al. [46] used an algebraic multigrid method for eigenvalue problems. Ma et al. [47] used the transformed rational function methods to study the exact solutions to (3 + 1) the dimensional Jimbo-Miwa equation. Li et al. proposed the primary form of the (W/G) extension [28]. They used this approach to research Vakhnenko’s nonlinear equation practical solutions. Gepreel [42] improved (W/G) to study the exact solutions for nonlinear integro–differential equations. In this paper, we illustrate that the improved (W/G) is generated in many direct methods for finding exact solutions for NPDEs when the parameters take some special values. Many scholars employed an evident expansion of the nonlinear physical problems (W/G) approach [28,29,42]. In this paper, we use modified expansion (W/G), where W, G is random to evaluate evolutionary equations:
- (i)
- The ODIDEs [43]:
Equation (1) was presented by the scientist Ito in 1980. It is generalized to bi-linear KdV and generally related to the model of Fokker–Planck.
- (ii)
- The HODSEs [44]:where is the varying slowly envelope of electromagnetic field, is time, is a distance along the direction of propagation, , is dispersive velocity, , , 2nd, 3rd, and 4th-order dispersive respectively while , are non-linearity coefficients.
2. The (W/G)-Expansion Direct Method
Suppose the nonlinear partial differential equation
where is a function in and its partial derivatives.
Step 1. Let the wave transformation is:
where is the wave velocity constant. Equations (3) and (4) lead to get:
Step 2. Suppose
, ,…, ) are constants and , satisfy condition:
Or
where , , are arbitrary constants.
Step 3. Determine by equating the power of highest order and the power of nonlinear term(s) in (5).
Step 4. Compensating Equation (6) into (5) along with (7). Setting the coefficients of , , ,…, ) to be zero, yield a set of over-determine equations for ,,…, ) and .
Step 5. Solving system of equations in step 4 to find , ,…, ) and .
Step 6. From the general solutions of algebraic equations and the exact solutions of Equation (8), we construct the exact solutions to evolution equations. A general solution to a general Riccati, Equation (8) was given by three Formulas (40)–(42) in an earlier reference [48].
Fact 1. If , , and this method equivalence the Tanh-function method, and , and , , are nonzero constants this method equivalent to the Riccati expansion function method [4,5].
Fact 3. When , . We have a direct method:
where , ,…, ) are constants, and satisfies the condition
which appear in [29,30].
Fact 4. If we put . We get
where , ,…, ) are constants, and satisfies NODE:
which discussed in [29,30].
Fact 5. If
and
where , are nonzero, is called -expansion method. From Facts 1–5, theoretically, the transformed rational function method [47] gives us a rational function expansion around a solution to an integrable ODE, which is the most general procedure to generate traveling wave solutions. A Riccati equation is just one possibility, of choosing an integrable ODE.
Remark 1.
1. Ma et al. [47] have supposed the solutions of NODEs as and They have discussed the exact solutions when and then integrate r- time to determine . This method is one of the effective and powerful methods to solve nonlinear ODEs. In the proposed method, trial equation is the generalized Riccati ODE (7) or (8), which contains many parameters to get a different type of several traveling wave solutions. The transformed rational function provides a way to construct traveling wave solutions, but not multiple wave solutions. Multiple wave solutions can be computed by using the multiple exp-function method.
2. In [48], the authors supposed the solutions in the form , , the trial equation satisfies the Bernoulli ODEs.
3. In [49], the authors construct the multiple solutions for NPDEs, which is a powerful method and determining the one and two solutions. The multiple exp-function method [49] aims to solve PDEs, but not integro–differential equations. Only one-wave and two-wave solutions are computed in [49], since N wave solutions, for example, N-soliton solutions need more elaborate theoretical consideration [50].
3. Exact Solutions for Nonlinear Physical Problems
In this section, we use the ()-expansion method, ()-direct method and -expansion method to discuss the analytical solutions for some of the nonlinear physical problems.
3.1. Abundant Solutions to of the (1 + 1)-IIDEs
We use the transformation
The transformation (15) changes the NIIDS (1) to
We take the transformation
where k is a velocity nonzero constant. Therefore, Equation (17) leads to write Equation (16) to NODE:
Using the integration, Equation (18) takes the form:
where is a constant.
3.1.1. (G′/G2)-Direct Method for (1 + 1)-NIIEs
In this part, we deduce the direct exact solution to Equation (19) by using ()-expansion method. Equating the power of the highest derivative with the power of nonlinear terms in (19), we suppose the solution of Equation (19) has the following form:
where and are constants and satisfies Equation (10). Equation (20) is a solution to Equation (19) when
where , and are nonzero arbitrary constants. The general solutions of Equation (10) lead to discuss the following families:
Family 1. If. ,
and
Consequently, periodic wave for the (1+1)-IIDEs (1) takes the form:
Family 2. If. ,
In this family, the solitary wave solution for (1+1) IIDEs (1) takes the form:
3.1.2. Modified (G′)-Expansion Method for the (1 + 1)-IIDEs
In this subsection, we deduce the different types of exact solutions to (19) using ()-expansion method. We suppose the solution of Equation (19) has the following form:
where and are constants and satisfies (12). Equation (27) along with the condition (12) is a solution of Equation (19) when
The general solutions of (12) leads to discuss the following families:
Family 3. If. ,
Consequently, periodic wave solution to (1+1)-IIDs (1) takes the form:
The solution (30) is bright soliton solution see Figure 1.
Family 4. If. ,
Consequently, the hyperbolic solution of the (1+1)-IIDEs (1) takes the form:
The solution (32) is bright soliton solution see Figure 2.
3.1.3. Modified (W/G)-Expansion Method for the (1 + 1)-DIIDEs
We use a new direct method, namely ()-expansion method to find the solution of Equation (19). Let
where and are constants and , satisfies the decouple differential Equation (14). Equation (33) along with condition (14) is a solution of Equation (19) when
There are many families, as follows:
Family 5. If. and , then Equation (14) leads to:
In this family, a solitary solution of Equation (1) is given by
Solution (36) is a dark soliton solution, see Figure 3.
Family 6. If. and , then Equation (14) leads to:
In this family, the solitary solution of Equation (1) is given by
where .
Family 7. If. and , then Equation (18) leads to:
Consequently, the periodic solution of Equation (1) takes the form:
The singular periodic solution (40) appears in Figure 4.
3.1.4. Bright, Dark, and Singular, Solitary Solutions of (1 + 1)-DIIDs
3.2. Exact Solutions to Nonlinear Dispersive Schrodinger Equation (NDSE)
In this section, we study the solution of NDESs
where is the varying slowly envelope of electromagnetic field, is time, is a distance along the direction of propagation, , is dispersive velocity, , , 2nd, 3rd, and 4th-order dispersive respectively while , are non-linearity coefficients. Equation (41) has been discussed in [42] using first integral and sub-equations ODE methods.
where is a real function, and , , , and are constants. Substituting transformation (42) into Equation (41), we get:
and
Provided . Differentiating Equation (44) and substituting the result into Equation (43), we have ODE:
where the coefficients , , and are given by
Balancing, the highest derivative with nonlinear term in Equation (45), to get . Consequently, suppose the solution in the form:
From (45) and (47), we have
3.2.1. The (g′/g2) Expansion Method to NDSEs
Balancing the nonlinear terms and in Equation (48), the solution of Equation (48) has the form:
Equation (49), along with condition (10), is a solution of Equation (48), when
where , and are nonzero constant parameters. From the solutions of Equation (10) we have following
Set 1. If. , the solitary wave solution for NDSEs (2) takes the form:
The soliton solution (51) is shown in Figure 5.
Set 2. If , , the rational traveling wave solution NDSE (2) takes the
3.2.2. (G′)-Expansion Method to NDSEs
The solution of Equation (48) has the following form:
satisfies Equation (12). Equation (53), along with condition (12), is a solution of Equation (48) when
where , and are constant parameters, and . The exact wave solution of Equation (12) has the following families:
Set 3. If , the solitary wave solution to NDSEs (2) takes the form:
Set 4. If the rational wave solution to NDSEs (2) takes the form:
3.2.3. The (W/G)-Expansion Method for NDSEs
We take the solution of Equation (48) in the following form:
Equation (57) along with the condition (12) is a solution of Equation (48) when
where , , are arbitrary nonzero constants and . There are many families of the exact solutions for Equation (12), discussed as the following families:
Set 5. If and , the solution to NSDEs (2) takes the form:
In the special case when and , the singular solutions is given by
Moreover, when and the dark solutions is given by
The soliton solution (61) is shown in Figure 6.
Set 6. If and , in this set, the exact solution Equation (12) is given by:
Consequently, the solitary wave solution of Equation (2) has the following form:
If and the dark soliton solutions is given by
and and the bright soliton solutions is given by
3.2.4. Bright and Singular Solitary Solutions to NDSEs
4. Conclusions
We developed a modern straightforward approach for designing precise solutions to nonlinear physics and engineering issues. Expanding (W/G) to nonlinear PDEs creates algebraic methods, for instance. We used this framework to address different forms of wave movement solutions, including optical solutions, a single wave solution, and wave sole solutions. We also used the suggested approaches of physics and technology as a significant issue, such as (1 + 1), the Ito integrated differential equation, and the Schrodinger non-linear, higher-order dispersion equation. This method is generalized to many other methods, such as the (G′/G)-expansion method, the tanh function method, and the Riccati expansion method, when the parameters are taken some special chosen. This method can be used to study many nonlinear physical problems in Quantum mechanics and Fluid mechanics. This way, questions that are more complicated will be addressed. We generated a diagram to display the form of wave solutions available.
Funding
Taif University Researchers Supporting project number (TURSP-2020/16), Taif University, Taif, Saudi Arabia.
Acknowledgments
The author thank Taif University Researchers supporting project number (TURSP-2020/16), Taif University, Saudi Arabia.
Conflicts of Interest
The author declares no conflict of interest.
References
- Hirota, R. Exact solution of the KdV equation for multiple collisions of solutions. Phys. Rev. Lett. 1971, 27, 1192–1194. [Google Scholar] [CrossRef]
- Wang, D.S.; Ren, Y.J.; Zhang, H.Q. Further extended sinh-cosh and sin-cos methods and new non traveling wave solutions of the (2+1)-dimensional dispersive long wave equations. Appl. Math. E-Notes 2005, 5, 157–163. [Google Scholar]
- Wang, M.L. Exact solutions for a compound KdV-Burgers equation. Phys. Lett. A 1996, 213, 279–287. [Google Scholar] [CrossRef]
- Zayed, E.M.E.; Zedan, H.A.; Gepreel, K.A. Group analysis and modified extended tanh- function to find the invariant solutions and soliton solutions for nonlinear Euler equations. Int. J. Nonlinear Sci. Numer. Simul. 2004, 5, 221–234. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Q. Extended Jacobi elliptic function rational expansion method and abundant families of Jacobi elliptic functions solutions to (1+1) dimensional dispersive long wave equation. Chaos Solitons Fractals 2005, 24, 745–757. [Google Scholar] [CrossRef]
- Zhang, S.; Xia, T.C. A generalized F-expansion method and new exact solutions of Konopelchenko-Dubrovsky equations. Appl. Math. Comput. 2006, 183, 1190–1200. [Google Scholar] [CrossRef]
- He, J.H.; Wu, X.H. Exp-function method for nonlinear wave equations. Chaos Solitons Fractals 2006, 30, 700–708. [Google Scholar] [CrossRef]
- Dai, Z.D.; Wang, C.J.; Lin, S.Q.; Li, D.L.; Mu, G. The three-wave method for nonlinear evolution equations. Nonlinear Sci. Lett. A 2010, 1, 77–82. [Google Scholar]
- Shehata, M.S.M. A new solitary wave solution of the perturbed nonlinear Schrodinger equation using Riccati-Bernoulli Sub-ODE method. Int. J. Phys. Sci. 2016, 11, 80–84. [Google Scholar]
- Bekir, A.; Tascan, F.; Unsal, O. Exact solutions of the Zoomeron and Klein Gordon Zahkharov equations. J. Assoc. Arab Univ. Basic Appl. Sci. 2015, 17, 1–5. [Google Scholar]
- Gepreel, K.A.; Nofal, T.A. Extended trial equation method for nonlinear partial differential equations. Z. Nat. A 2015, 70, 269–279. [Google Scholar] [CrossRef]
- Gepreel, K.A. Extended trial equation method for nonlinear coupled Schrodinger Boussinesq partial differential equations. J. Egypt. Math. Soc. 2016, 24, 381–391. [Google Scholar] [CrossRef] [Green Version]
- Adem, A.R.; Muatjetjeja, B. Conservation laws and exact solutions for a 2D Zakharov–Kuznetsov equation. Appl. Math. Lett. 2015, 48, 109–117. [Google Scholar] [CrossRef]
- Adem, A.R.; Khalique, C.M. Conserved quantities and solutions of a (2+1)-dimensional H a ˇ r a ˇ gus-Courcelle–Il’ichev model. Comput. Math. Appl. 2016, 71, 1129–1136. [Google Scholar] [CrossRef]
- Adem, A.R. The generalized (1+1)-dimensional and (2+1)-dimensional Ito equations: Multiple exp-function algorithm and multiple wave solutions. Comput. Math. Appl. 2016, 71, 1248–1258. [Google Scholar] [CrossRef]
- Zayed, E.M.E.; Al-Nowehy, A.G. The multiple Exp-function method and the linear superposition principle for solving the (2+1)-dimensional Calogero–Bogoyavlenskii–Schiff equation. Z. Nat. A 2015, 70, 775–779. [Google Scholar] [CrossRef]
- He, J.H. Homotopy perturbation method for bifurcation of nonlinear wave equations. Int. J. Nonlinear Sci. Numer. Simul. 2005, 6, 207–208. [Google Scholar] [CrossRef]
- Liu, H.M. Generalized variational principles for ion acoustic plasma waves by He’s semi-inverse method. Chaos Solitons Fractals 2005, 23, 573–576. [Google Scholar] [CrossRef]
- Ganjiani, M.; Ganjiani, H. Solution of coupled system of nonlinear differential equations using homotopy analysis method. Nonlinear Dyn. 2009, 56, 159–167. [Google Scholar] [CrossRef]
- Abdou, M.A.; Yildirim, A. Approximate analytical solution to time fractional nonlinear evolution equations. Int. J. Numer. Methods Heat Fluid Flow 2015, 22, 829–838. [Google Scholar] [CrossRef]
- Miura, M.R. Backlund Transformation; Springer: Berlin/Heidelberg, Germany, 1978; 253p. [Google Scholar]
- Weiss, J.; Tabor, M.; Garnevalle, G. The Paineleve property for partial differential equations. J. Math. Phys. 1983, 24, 522–526. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Clarkson, P.A. Solitons, Nonlinear Evolution Equations and Inverse Scattering Transform; Cambridge University Press: Cambridge, UK, 1991; 149p. [Google Scholar]
- Adem, A.R.; Lü, X. Travelling wave solutions of a two-dimensional generalized Sawada–Kotera equation. Nonlinear Dyn. 2016, 84, 915–922. [Google Scholar] [CrossRef]
- Abdou, M.A.; Elgarayhi, A. On the homotopy asymptotic of Quantum Zakharove equation in ion acoustic waves. Walailak J. Sci. Technol. 2015, 13, 365–373. [Google Scholar]
- Porubov, A.V. Periodical solution to the nonlinear dissipative equation for surface waves in a convecting liquid layer. Phys. Lett. A 1996, 221, 391–394. [Google Scholar] [CrossRef]
- Wang, M.; Li, X.; Zhang, J. The (G′/G)-expansion method and traveling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 2008, 372, 417–423. [Google Scholar] [CrossRef]
- Li, W.A.; Chen, H.; Zhang, G. The (w/g)-expansion method and its application to Vakhnenko equation. Chin. Phys. B 2009, 18, 400–409. [Google Scholar]
- Zayed, E.M.E.; Arnous, A.H. The modified (w/g) expansion method and its applications for solving the modified generalized Vakhnenko equation. Ital. J. Pure Appl. Math. 2014, 32, 477–492. [Google Scholar]
- Krasil’shchik, I.S.; Vinogradov, A.M. Symmetries and Conservation Laws for Differential Equations of Mathematical Physics; American Mathematical Society: Providence, RI, USA, 1999; Volume 182. [Google Scholar]
- Krasil’shchik, I.S.; Lychagin, V.V.; Vinogradov, A.M. Geometry of Jet Spaces and Nonlinear Differential Equations; Gordon and Breach: New York, NY, USA, 1986. [Google Scholar]
- Igonin, S.; Manno, G. On Lie algebras responsible for integrability of (1+1)-dimensional scalar evolution PDEs. J. Geom. Phys. 2020, 150, 103596. [Google Scholar] [CrossRef] [Green Version]
- Igonin, S.; Manno, G. Lie algebras responsible for zero-curvature representations of scalar evolution equations. J. Geom. Phys. 2019, 138, 297. [Google Scholar] [CrossRef] [Green Version]
- Morozov, O.I. Deformations of infinite- dimensional Lie algebras, exotic cohomology, and integrable nonlinear partial differential equations. J. Geom. Phys. 2018, 128, 20. [Google Scholar] [CrossRef] [Green Version]
- Magnot, J.P. Ambrose—Singer theorem on diffeological bundles and complete integability of the KP equation. Int. J. Geom. Methods Mod. Phys. 2013, 10, 1350043. [Google Scholar] [CrossRef]
- Bazighifan, O.; Ahmad, H.; Yao, S.W. New oscillation criteria for advanced differential equations of fourth order. Mathematics 2020, 8, 728. [Google Scholar] [CrossRef]
- Ahmad, H.; Khan, T.; Stanimirovic, P.; Ahmad, I. Modified variational iteration technique for the numerical solution of fifth order KdV type equations. J. Appl. Comput. Mech. 2020, 6, 1220–1227. [Google Scholar]
- Bazighifan, O. On the oscillation of certain fourth-order differential equations with p-Laplacian like operator. Appl. Math. Comput. 2020, 386, 125475. [Google Scholar] [CrossRef]
- Ahmad, H.; Akgül, A.; Khan, T.; Stanimirović, P.; Chu, Y. New Perspective on the Conventional Solutions of the Nonlinear Time-Fractional Partial Differential Equations. Complexity 2020, 2020, 8829017. [Google Scholar] [CrossRef]
- Zaydan, M.; Wakif, A.; Animasaun, I.L.; Khanc, U.; Baleanu, D.; Sehaquia, R. Significances of blowing and suction processes on the occurrence of thermo-magneto-convection phenomenon in a narrow nanofluidic medium: A revised Buongiorno’s nanofluid model. Case Stud. Therm. Eng. 2020, 22, 100726. [Google Scholar] [CrossRef]
- Adegbie, K.S.; Abdelmalek, Z.; Vaidyaa, H.; Ijirimoye, A.F.; Prasad, K.V. Significance of suction and dual stretching on the dynamics of various hybrid nanofluids: Comparative analysis between type I and type II models. Phys. Scr. 2020, 95, 095205. [Google Scholar]
- Gepreel, K.A. Exact solutions for nonlinear integral member of Kadomtsev–Petviashvili hierarchy differential equations using the modified (w/g)- expansion method. Comput. Math. Appl. 2016, 72, 2072–2083. [Google Scholar] [CrossRef]
- Zhao, Z.; Dai, Z.; Han, S. The EHTA for nonlinear evolution equations. Appl. Math. Comput. 2010, 217, 4306–4310. [Google Scholar] [CrossRef]
- Zayed, E.M.E.; Elshater, M.E.M. Jacobi elliptic solutions, soliton solutions and other solutions to four higher-order nonlinear Schrodinger equations using two mathematical methods. Opt. Int. J. Light Electron Opt. 2017, 131, 1044–1062. [Google Scholar] [CrossRef]
- Yang, J.; Ma, W.X.; Khalique, C. Determining lump solutions for a combined soliton equationin (2+1)-dimensions. Eur. Phys. J. Plus 2020, 135, 494. [Google Scholar] [CrossRef]
- Zhang, N.; Han, X.; He, Y.; Xie, H.; You, C. An algebraic multigrid method for eigenvalue problems and its numerical tests. East Asian J. Appl. Math. 2021, 11, 1–19. [Google Scholar] [CrossRef]
- Ma, W.X.; Lee, J. A transformed rational function method and exact solutions to the 3+1 dimensional Jimbo–Miwa equation. Chaos Solitons Fractals 2009, 42, 1356–1363. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.X.; Fuchssteiner, B. Explicit and exact solutions to a Kolmogrove–Petrovskii–Piskunov equation. Int. J. Nonlinear Mech. 1996, 32, 329–338. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.X. A multiple exp-function method for nonlinear differential equations and its application. Phys. Scr. 2010, 82, 065003. [Google Scholar] [CrossRef]
- Ma, W.X. N-soliton solutions and the Hirota conditions in (2+1)-dimensions. Opt. QuantumElectron. 2020, 52, 511. [Google Scholar] [CrossRef]
Figure 1.
The periodic soliton solution (30) of Equation (1) and its projection at when .

Figure 2.
The bright soliton solution (32) of Equation (1) and its projection at when .

Figure 3.
Dark soliton solution (36) of Equation (1) and its projection at when .

Figure 4.
Singular periodic solutions (40) of Equation (1) and its projection at when .

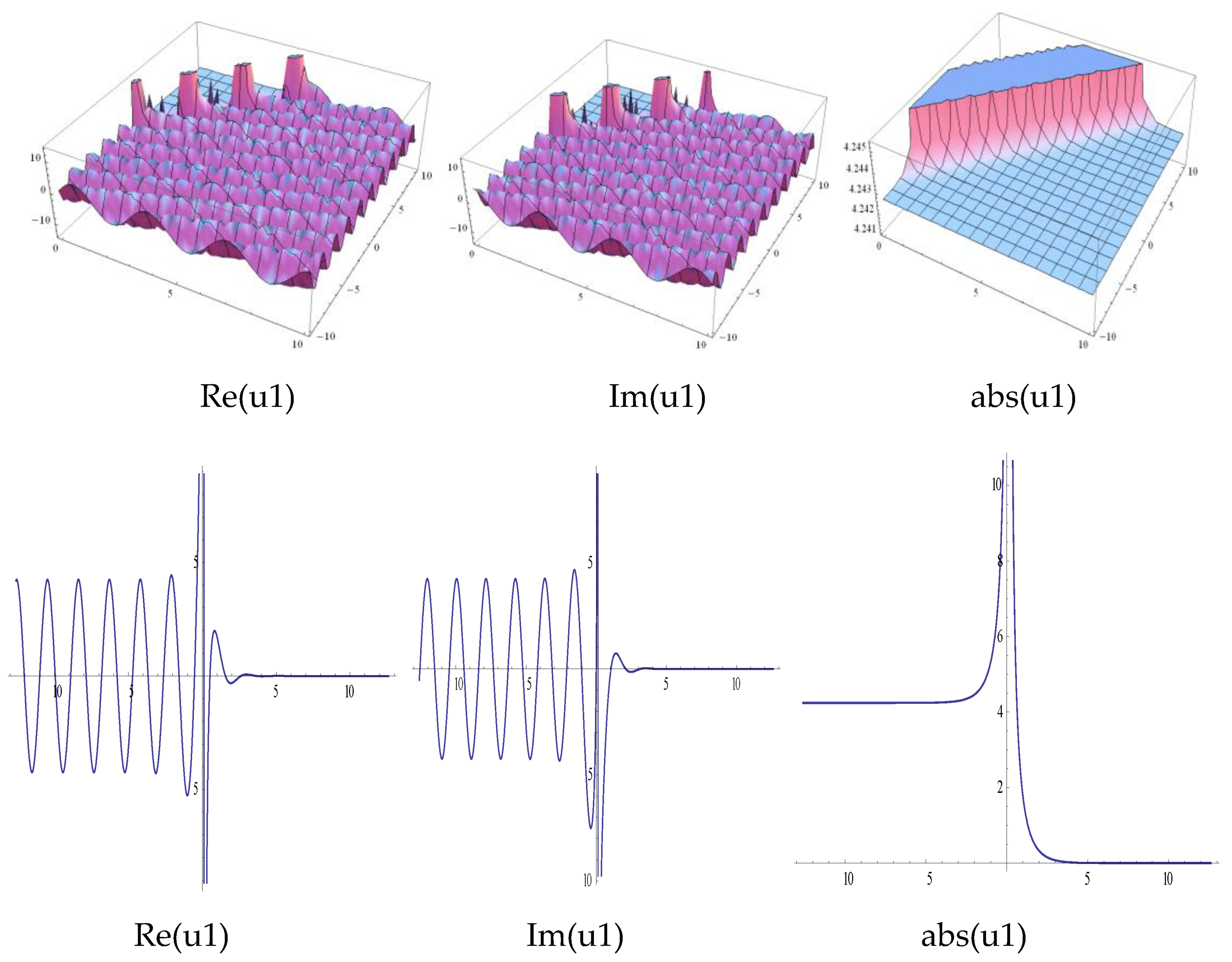
Figure 5.
Solitary wave solution (51) of Equation (2) and its projection at when .

Figure 6.
Singular periodic wave solution (6) of Equation (2) and its projection at when .


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Gepreel, K.A. Analytical Methods for Nonlinear Evolution Equations in Mathematical Physics. Mathematics 2020, 8, 2211. https://doi.org/10.3390/math8122211
AMA Style
Gepreel KA. Analytical Methods for Nonlinear Evolution Equations in Mathematical Physics. Mathematics. 2020; 8(12):2211. https://doi.org/10.3390/math8122211
Chicago/Turabian StyleGepreel, Khaled A. 2020. "Analytical Methods for Nonlinear Evolution Equations in Mathematical Physics" Mathematics 8, no. 12: 2211. https://doi.org/10.3390/math8122211
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.