On the Construction of Some Deterministic and Stochastic Non-Local SIR Models


Dipartimento di Matematica e Applicazioni Renato Caccioppoli, Università degli Studi di Napoli Federico II, I-80126 Naples, Italy
Mathematics 2020, 8(12), 2103; https://doi.org/10.3390/math8122103
Submission received: 6 November 2020
/
Revised: 22 November 2020
/
Accepted: 23 November 2020
/
Published: 24 November 2020
(This article belongs to the Special Issue Stochastic Models with Applications)
Abstract
:Fractional-order epidemic models have become widely studied in the literature. Here, we consider the generalization of a simple model in the context of generalized fractional calculus and we study the main features of such model. Moreover, we construct semi-Markov stochastic epidemic models by using time changed continuous time Markov chains, where the parent process is the stochastic analog of a simple epidemic. In particular, we show that, differently from what happens in the classic case, the deterministic model does not coincide with the large population limit of the stochastic one. This loss of fluid limit is then stressed in terms of numerical examples.
MSC:
92-10; 60K15; 60G221. Introduction
Starting from the seminal paper by Kermack and McKendrick [1], epidemic models have been a fruitful field of applications of dynamical systems. However, stochastic models for epidemic were already proposed by McKendrick in [2]. Starting from these papers, different epidemic models, both deterministic and stochastic, have been considered. The approach we focus on in this paper is the Continuous-Time Markov Chain one, used for instance by [3] and then successively extended to different deterministic models (see, e.g., [4,5] and references therein). For more recent works, we refer, for instance, to those of Ball [6] (in which the authors describe some exact results on the distribution of final size of the epidemics), Lefѐvre and Simon [7] (for a matrix analysis approach), Ball et al. [8] (in which social distancing is modeled in terms of adaptive random graphs), and Liu et al. [9] (in which the authors modeled environmental noise via Lévy jumps).
In modern times, epidemic models with information variables have been considered, in the context of behavioral epidemiology (to cite a contemporary paper, see [10], which deals with the COVID-19 pandemic). The information variable in behavioral epidemiology is a first important example of the introduction of memory effects in deterministic epidemic models (see, e.g., [11,12,13]). Indeed, the information variable can be modeled as the convolution product between a function of the state of the system (representing the information that individuals consider relevant) and a memory kernel (representing the weight that individuals give to the past history of the system).
In stochastic epidemic modeling, instead, the necessity of introducing some memory effects is solved by considering semi-Markov epidemic models (in place of Markov ones), which, however, are more difficult to handle (see, e.g., [14]).
With the idea of introducing memory effects in mind, we can consider the case of non-integer order epidemic models. Indeed, fractional calculus operators (e.g., the Caputo fractional derivative) are non-local convolution operators that weight in some sense the variation of a function during its entire lifetime. To cite some fractional-order epidemic models, let us recall the works of Diethelm [15] concerning outbreaks of dengue fever and dos Santos et al. [16] for some bovine diseases, as well as simpler models (e.g., [17,18]). All these models are strictly linked with the introduction of fractional-order dynamical systems, as in [19,20]. Let us also recall that fractional-order models could also arise as one consider continuous-time random walk approaches to construct epidemic models (see, e.g., [21]). The advantage of taking in consideration fractional-order models (or non-local models in general) is the fact that the modeled dynamics does not depend on the instantaneous state of the system, but on the whole history of it. In a certain sense, as the information variable is introduced to model human behavior depending on the information individuals have on the history of the epidemic, non-local models take in consideration memory effects on the epidemic that do not depend on human behavior but on the characteristic of the epidemic itself.
Concerning population models, one obtains analogous fractional-order stochastic models (or more general non-local models) by using time-changed continuous-time Markov chains, as one can see, for instance, in [22,23,24,25]. This fractionalization procedure leads to non-local stochastic models which are in some sense the counterpart of non-local deterministic ones. However, this procedure works due to the linear nature of the considered models. Even the simpler model with linear force of infection admits a non-linearity, hence we cannot expect that non-local models (obtained by a naive substitution of the time-derivative with a non-local operator) correspond directly to time-changed stochastic models.
This paper focuses on introducing some general non-local model by such kind of naive substitution in terms of Caputo-type non-local derivative induced by Bernstein functions (see [26,27,28]) and then some time-changed (by means of inverse subordinators) stochastic models. Concerning the deterministic case, we aim to introduce some alternative models with respect to the fractional-order ones, to work with different memory kernels. On the other hand, time-changed models constitute an interesting class of semi-Markov stochastic models, which, as stated above, are more natural to consider.
After a preliminary introduction of the main tools, given in Section 2, in Section 3, we give a qualitative study of the non-local model, illustrating the main differences with respect to the classical one. After that, we first recall some main properties of the stochastic model in Section 4 and then in Section 5 we consider its time-changed version. In particular, we show that the state probabilities of the process solve a system of non-local difference-differential equations and their expected values solve a system of two non-local differential equations that resembles in some sense the non-local model introduced in Section 3 (despite not being equal, due to the non-linearity of the model). We also show that a side effect of the time-change is a delay in the epidemic dynamics. In Section 6, we study large population limits of the time-changed model. The result we obtain is a sort of negative result: the usual fluid limit of the stochastic model is not preserved by the time-change, and then the non-local model cannot be seen as a mean field behavior of the time-changed model. In Section 7, we show some numerical evidence supporting our negative results. Conclusive observations are then considered in Section 8.
However, let us anticipate an important feature one has to take in consideration when working with non-local models (both deterministic and stochastic). Such kind of models do not adapt well to epidemics for which the number of infective is approximatively diffusive or super-diffusive in time (i.e., if the number of infective exhibits a variance of the form with , see, e.g., [29]), thus limiting the field of applications. In particular, there is evidence that the Coronavirus infectious disease 2019 (COVID-2019) admits a super-diffusive behavior in some contexts (see, e.g., [30,31]), hence these models should not be applied to describe such infectious disease in the super-spreading environment.
2. Inverse Subordinators and Non-Local Convolution Derivatives
Before introducing the actual model, let us give some preliminaries on the non-local operators we use in the following. Let us fix in the whole text a filtered probability space .
Definition 1.
We say that is aBernstein functionif (where we denote ), for any and, for any and ,
For generalities on Bernstein functions, we refer to [32]. Let us denote by the convex cone of Bernstein functions. For any , there exists a unique triplet , where and is a measure on with the integrability property
such that
The triple is said to be the characteristic triple of and is the Lévy measure of .
Moreover, let us recall that for each Bernstein function there exists a subordinator (i.e., an increasing Lévy process) such that
In the following, we always consider and . As , we know that the subordinator is not killed. Moreover, since and , we know that is a pure jump strictly increasing process (see [33]).
Definition 2.
Given a subordinator , we define the inverse subordinator associated to Φ as the process
From now on, let us denote and the law of the random variable . In [34], it is shown that admits a probability density function given by
Moreover, denoting by the Laplace transform operator, it holds that
and
for any . Now, we can introduce the non-local convolution derivatives (of Caputo type) associated with , as given in [26,27].
Definition 3.
Let be an absolutely continuous function. Then, we define the non-local convolution derivative induced by Φ of u as
Remark 1.
In analogy of what is usually done with Riemann–Liouville and Caputo derivatives, one can introduce the following regularized non-local derivative
observing that it coincides with the previous definition on absolutely continuous functions.
Remark 2.
Let us observe that, if , for , the operator coincides with the usual fractional Caputo derivative.
Let us recall that, if both u and are Laplace transformable, then
We are interested in the eigenfunctions of such operators. It can be shown, by Laplace transform arguments (see, e.g., [28,35]) or Green functions arguments (see [36]), that the (eigenvalue) Cauchy problem
admits a unique solution for any and it is given by (hence, in particular, it is a completely monotone function in the variable for fixed t).
Remark 3.
We are also interested in the following subclass of Bernstein functions.
Definition 4.
Let . We say that Φ is a special Bernstein function if is still a Bernstein function, called the conjugate Bernstein function.
Let us denote by the class of special Bernstein functions. If , we call a special subordinator. Let us also introduce the renewal function of
Under the assumption and , if , we know there exists a non-increasing non-negative function such that
called the potential density of .
In [38], it is shown that, for any absolutely continuous function , it holds that
where is defined as
In particular, if g is Laplace transformable, it holds that
By using such property, we can show the following comparison principle.
Proposition 1.
Let . Suppose are Laplace transformable with their non-local convolution derivatives and such that and for any . Then, for any .
Proof.
Let us consider for some function that is Laplace transformable by hypotheses. Let us take the Laplace transform on both sides to obtain
Dividing everything by , we have
Now, let us take the inverse Laplace transform to obtain
concluding the proof. □
From now on, let us consider . We can also show a generalized mean value theorem, following the lines of ([39] Theorem 1).
Theorem 1.
Let be continuous in and consider . Then, there exists such that
Proof.
Let us observe that, by definition,
By the integral mean value theorem, we know that there exists such that
On the other hand, we have
thus Equation (5) holds. □
Let us finally recall the following definition, which is useful in what follows.
Definition 5.
A function is said to be regularly varying at ∞ of order if for any
We say that f isregularly varyingat of order if is regularly varying at infinity of order α.
3. A Non-Local SIR Model
Let us consider the following model
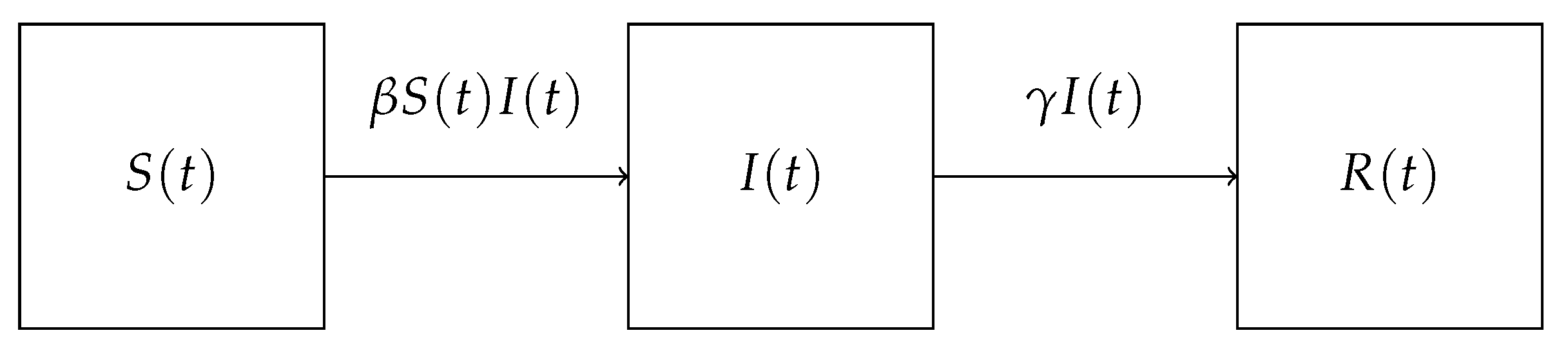
where are, respectively, the infection parameter and the removal parameter. A schematization of the compartments of the model is given in Figure 1.
This model constitute a non-local counterpart to the simple model without population dynamics. By existence and uniqueness of uniformly bounded solutions (see [28]), we have that , where N is a fixed constant. Let us set for simplicity . In such way, we can consider , , and to be, respectively, the density of susceptible, infected, and removed entities in the population. In particular, we can recover , thus we only need to study the dynamics of and , through the system
As a first step, we need to show that both and are non-negative if we start from initial datum . To do this, let us first observe that, by existence and uniqueness of uniformly bounded solutions (see [28] Corollary 4.6 for the linear case: the proof can be easily adapted to the bilinear case), we have that the equilibrium points of the dynamical system are of the form . Indeed, if , then the unique solution of the system is given by . Now, we can show the following proposition.
Proposition 2.
Proof.
Let us first observe that cannot leave the quadrant (where ) through a point of the form for by existence and uniqueness of uniformly bounded solutions. To show that if we start from we cannot leave the quadrant through a point with , let us show that for any we can construct a solution starting from a certain with and such that and for any fixed .
To do this, let us observe that, if we consider and , then we have and
Let us fix and . Then, choosing
we have found a solution such that . Thus, by existence and uniqueness of uniformly bounded solutions, cannot leave the quadrant through . □
As a corollary, we also obtain that .
Corollary 1.
Proof.
By the previous proposition, we know that for any . Moreover, since , we have that . By the comparison principle in Proposition 1, we know that for any . We conclude the proof observing that this implies . □
As stated above, the equilibrium points are given by where . Moreover, since , we can use the generalized mean value theorem to conclude that if , then . In particular, this means that
The comparison principle implies that . Thus, if , we have that as .
If , we still have . Moreover, implies that there exists a time such that for any . Let us define the maps and as in Theorem A1. In particular, for ,
In particular, we have that
since .
As in the ordinary case, we can define the basic reproductive number as . With the previous observations, we show the following result.
Proposition 3.
If , then for any and .
Remark 4.
In the case , we have that, at least for short times, by the comparison principle, . However, we could conclude that even in this case if we are able to show that there exists a time for which . This new condition (with respect to the ordinary case) is due to the lack of semigroup property of the flow , together with the fact that we do not have any asymptote theorem for non-local derivatives. However, numerical examples, at least in the fractional-order case, seem to confirm the fact that even if .
4. Some Generalities on the Stochastic SIR Model
Let us now give some generalities on the (simple) stochastic SIR model. We prevalently follow the lines of Daley and Gani [4]. First, let us construct a SIR model by denoting with the number of susceptible individuals, the number of infective individuals, and the number of removed individuals at time . Suppose the population is closed, that is to say there exists a constant such that
Thus, we can deduce from and simply imposing . Thus, we are interested in the bivariate process , which is a Continuous Time Markov Chain. Let us consider as state space the set
Now, let us define as the infection and removal parameters, respectively, as done in the previous section. Let us denote the transition probability functions as
Then, for any and , it holds that
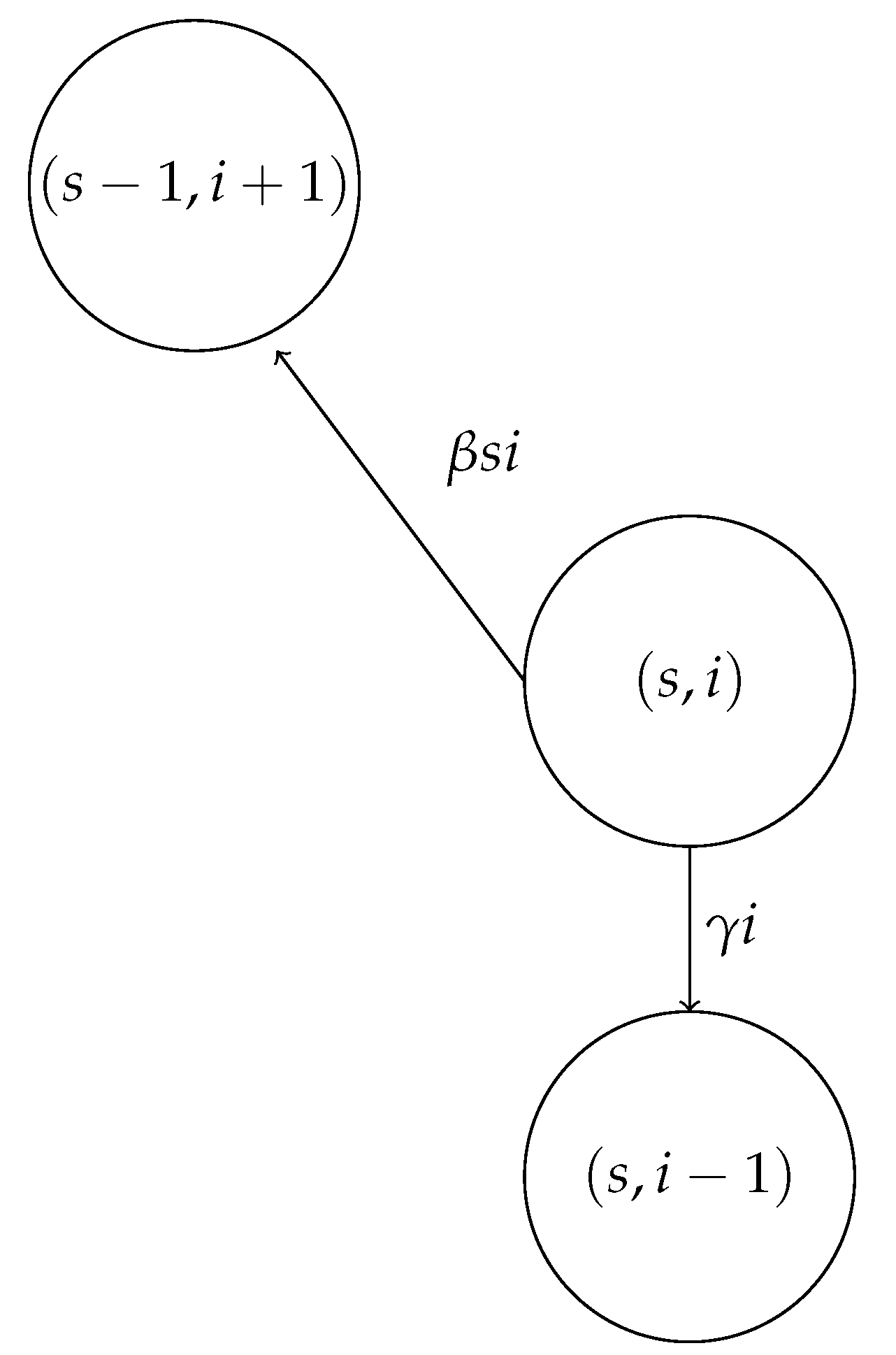
These transition probability functions are compatible with the choice of the state space, since it is easy to see that and for any . A graphical schematization of the bivariate chain is given in Figure 2.
In the following, let us fix two constants such that and let us define the set . For the bivariate process , we can define the state probabilities
that solve the following forward Kolmogorov equations
If we introduce the probability generating function
then we have the following proposition (see [4]).
Proposition 4.
The functions are solutions of (8) if and only if is solution of the following initial value problem:
Let us also observe that this process admits as absorbent states for any and does not admit any recurrent state. In particular, becomes almost surely definitely constant. In particular, for a fixed , we have that where . Let us define the ultimate size of the epidemic as and the intensity of the epidemic as . We obtain the distribution of the random variable by the formula
On the other hand, let us denote by the cumulative distribution function of , i.e.,
If there exists such that , then the event that at least one individual has been infected occurs with non-null probability. For this reason, we say that a major outbreak occurs (for the initial datum and the couple of parameter ) if and only if there exists such that . Let us also recall that, since , and . On the other hand, if for any it holds that , then, by continuity, and then almost surely.
A closed form of is not known in general. However, it is still useful to obtain some bounds on , depending on the basic reproductive number , which is defined in the stochastic model in the same way as stated above. In particular, the following threshold theorem holds (see [40]).
Theorem 2.
Let us consider a stochastic SIR model with initial datum and basic reproductive number . Consider .
- If , we have
- If , we have
- If , we have .
This threshold theorem is improved, e.g., in [41], but we focus only on a particular consequence, which is commonly called -dogma.
Corollary 2.
A major outbreak occurs if and only if .
Let us recall that this is true also in the deterministic case (both ordinary and non-local), where with the statement “a major outbreak occurs” we intend that at a certain time it holds that .
The duration of the epidemics is defined as
and is almost surely finite with finite mean. Indeed, since is a continuous time Markov chain, it is easy to see that can be controlled almost surely by an Erlang random variable with shape parameter and rate . This is because, if we define as the sojourn time of in the state , we have
where
for which for any with . The conditional distribution of any sojourn time is given by Equation (10) by using the Markov property of in the jump times. On the other hand, we can consider the state space as the set of vertices of an oriented graph where for any the edges starting from are of the form whenever and whenever . It is easy to see that the maximal length of paths in G is . Thus, is controlled by the time of jumps (which is the worst case scenario) with rate (which is the lowest possible rate).
Let us finally recall that, as usual for continuous time Markov chains, we can consider the jump chain embedded in . In particular, the distributions of , and depend only on the jump chain.
5. The Time-Changed Stochastic SIR Model
Now, we want to introduce our time-changed stochastic SIR model. To do this, let us consider the stochastic SIR process discussed in the previous section. Let and consider the inverse subordinator independent of .
Definition 6.
The time-changed stochastic SIR process induced by and Φ is defined as
We call theparent process.
Let us first remark that such kinds of processes are not Markov processes but only semi-Markov (see, e.g., [42,43,44,45]). Thus, in particular, Markov property still holds in correspondence of the jump times, leading to the definition of the same embedded jump chain, independently of the choice of . This implies that the distributions of the random variable , and do not depend on the choice of the Bernstein function and coincide with the ones of the Markov case. Thus, both Whittle’s threshold theorem (i.e., Theorem 2) and the -dogma (i.e., Corollary 2) still hold true. What actually changes is the transient state. This can be first seen by the fact that the distribution of the sojourn time depend on the choice of by means of the eigenfunctions of the operator .
Proposition 5.
Let be the sojourn time of in the state . Then, for any with , it holds that
where is defined in Equation (11).
Proof.
Let us first observe that, by definition, it holds that
thus . However, since and are independent and does not admit any fixed discontinuity point, by a simple conditioning argument, one obtains . Moreover, let us recall that is the left-continuous inverse of and the latter is continuous, hence if and only if . Thus, we have
Since and are independent, we obtain
where we use Equation (10) and the definition of . □
Despite the process is not Markov, we can still define the state probabilities as
Arguing as above, we can show the following integral representation.
Lemma 1.
It holds
Proof.
Let us observe that almost surely and it is independent of , hence it holds that
□
As done in the classical case, we can introduce the probability generating function
for which, by linearity, the following integral representation holds
In the next subsection, we obtain the non-local forward Kolmogorov equations for the process .
5.1. The Non-Local forward Kolmogorov Equations
The first thing we have to do is to establish an equivalence between the (non-local) linear system
and the (non-local) partial differential equation
Here, as solution of Equation (17) (and analogously of Equation (16)), we intend a function that satisfies both the initial condition and the equation in (17) pointwise.
Before doing this, we need the following easy technical Lemma.
Lemma 2.
Let be solutions of Equation (16) and for any . Suppose . Then, for any integer , it holds that .
Proof.
Let us argue by induction on . Let us first consider . Then, . Observing that , we have that
However, , thus we actually have
whose unique solution is . If , we complete the proof. Now, let us suppose . Let us suppose that, for some fixed , it holds that for any . Let us show that . To do this, let us observe that since . Moreover, , thus . Hence, it holds that
Now, let us observe that , hence . Moreover, we have . Thus, we can rewrite the equation as
whose unique solution is , concluding the proof. □
Lemma 3.
Proof.
Let us first suppose that are solutions of Equation (16). First, we have by definition.
On the other hand, multiplying the first equation of (16) by and the second one by , and then summing over , we have, by linearity of ,
Recalling that , we have . Moreover, by Lemma 2, we know that . Thus, the previous equality is equivalent to
Now, let us observe that
Thus, we have
showing that is solution of (17).
Conversely, if is solution of (17), then, since
we have that and for . Moreover, by Equations (17) and (18), we have
However, by linearity
thus, by identity of polynomials, we conclude the proof. □
Now that we have this equivalence result, we can directly work with to show that Equation (16) are the actual non-local forward Kolmogorov equations of the coupled process . Indeed, we have:
Proof.
Let us recall Equation (15) and the fact that , since almost surely. This implies that . On the other hand, for fixed , we have that is Laplace transformable since are non-negative and bounded for . Let us denote by the Laplace transform of with respect to the variable t, which is well-defined for such that . By Fubini’s theorem, we have
Now, let us observe that is differentiable in t and for any and such that (since, in such case, ). Thus, we can integrate by parts to obtain
Now, by Equation (9), we have
Writing and observing that is a polynomial in z and w, thus we can exchange the derivative and the integral sign, we have
Multiplying everything by (that is not 0 as ), we have
As above, since is a polynomial in , we can exchange the derivative sign with the Laplace transform obtaining
Now, let us divide everything by to achieve
Since we write as an integral, we know that it is absolutely continuous, hence we can differentiate both sides for almost any , obtaining that the equation of the Cauchy problem (17) holds for almost any .
Let us observe that this implies that satisfies (16) for almost any . However, Equation (16) admits a unique continuous solution (see, e.g., [28]), thus is continuous in and so does . From this, we have also that the function
is continuous. Thus, one can differentiate on both sides of Equation (19) for any , concluding the proof. □
Remark 5.
In the previous theorem, we also prove that is the unique continuous solution of (16).
5.2. The Equation of the Mean
Let us recall that the state space is finite, thus the process admits moments of any order. In particular, we have the following relations:
By using these relations, we obtain a (non-local) Cauchy problem for the functions and .
Corollary 3.
The functions and are solutions of
Proof.
Since is a polynomial in , one easily obtains
and the same holds for and .
First, let us observe that, by definition, and . Now, let us consider the Cauchy problem (17) and differentiate the first equation with respect to z to obtain
Substituting , we have
However, recalling that
we have
As above, substituting , we have
and then, by using again relation (21), we get
concluding the proof. □
Remark 6.
Let us observe that, if we neglect the covariance term, Equations (20) and (7) coincide. The same happens in the classical case. However, the results in [46] can be used to show the convergence for big population of to the solution of (7) (for , i.e., the classical SIR model). More details are contained in [47].
On the other hand, in [48,49], the authors proved the mean-field convergence of some stochastic epidemic models (in particular, in [49], the SIR model) to their deterministic counterpart with an elementary proof.
Giving an interpretation of the aforementioned convergence result, we could say that considering a very big population we decouple in a certain sense the two processes and , in such a way that any individual is independent from each other. This principle is typical of the mean field approach, as for instance one can see in the seminal theory of mean field games (see [50,51]). However, as we show in Section 6, this is not the case of the time-changed SIR model.
5.3. Delaying the Epidemic
Before exploiting the mean field convergence results, let us make some considerations on the outbreak duration. Indeed, we observe above that both Whittle’s threshold theorem and the -dogma still hold in this case, since the jump chain of the process is left invariant by the time-change.
However, one thing that drastically changes is the outbreak duration. Let us denote by the outbreak duration in the time-changed case, i.e.,
We observe above that is almost surely finite with finite mean. Concerning , we have quite a different behavior.
Proposition 6.
Let Φ be regularly varying at of order . Then, the random variable is almost surely finite and it holds that
as , where is the outbreak duration of the parent process.
Proof.
Let us first show that is almost surely finite. To do this, let us just observe that we can (stochastically) control with the sum of copies of a variable whose distribution is given by
Indeed, we can consider the oriented graph defined in Section 4 and observe that the maximum length of a path in G is given by . Moreover, by complete monotonicity of the function and the fact that for any with , it holds, by Proposition 5, that
for any with . Thus, denoting by ⪯ the usual stochastic ordering, we have that . Moreover, being the coupled process a semi-Markov process, we can conclude that any sojourn time is stochastically less than . Thus, we have that is made, in the worst case scenario, of sojourn times, each one controlled by an independent copy of , i.e.,
where each is an independent copy of . In particular, is the sum of (hence, a finite number) of independent almost surely finite random variables, hence is also almost surely finite.
Remark 7.
Let us observe that the hypothesis of regular variation comes into play only in the second part of the proof, hence we can conclude that is almost surely finite even if Φ is not regularly varying.
Moreover, the asymptotic result on implies that .
The latter result implies that, in a certain sense, the time-change procedure we applied lead to a delay in the epidemics, which is something expected since the new clock admits segments of constancy.
6. Large Population Limits
In this section, we study a large population limit for our model. Let be the set of cadlag functions on the interval , the set of continuous functions on the interval , and the set of increasing functions for some . For any metric space M, let us denote by its dual, i.e., the space of linear continuous functionals on M. Let M be a metric space and be a sequence of M-valued random variables. Let also X be an M-valued random variable. We say that weakly converges towards X (and we denote it as ) if for any functional it holds that as .
On the set , let us consider the uniform norm
Let us observe that such norm can be applied to any bounded function f defined almost everywhere on (where sup denotes the essential supremum). We have that is a Banach space, hence a metric space. Moreover, let us denote the following metric on :
where . In particular, is a closed subspace of . Finally, let us denote by f is increasing}. For more details, we refer to [53]. Let us show the following limit result.
Proposition 7.
Let be a time-changed SIR process with infection rate , removal rate γ and initial state such that . Let and let us denote
Let us consider the Cauchy problem
and let us define the process . Then, we have that in for any .
Proof.
The proof is an easy consequence of the fluid limit for the stochastic SIR model and the continuous mapping theorem. Indeed, the parent processes converge uniformly almost surely towards in and then weakly in (see, e.g., [47]). Being and independent, we have in . Moreover, is a continuous function and belongs almost surely to . Thus, by continuity of the composition map on (see [53] Theorem 13.2.2) and the continuous mapping theorem (see [53] Theorem 3.4.3), we conclude the proof. □
Remark 8.
7. Numerical Simulations
Let us show some numerical simulations of both the stochastic and the deterministic model. All the simulations were obtained using R (see [54]). In this section, we consider , since we do not want to add some complications to simulation procedure. Concerning the numerical solution of the system (7), we used a one-step explicit rectangular product-integration rule, as shown, for instance, in [55]. For other Bernstein functions, one could provide product-integration rules in the same spirit as the one described.
To see the effects of the non-locality in the deterministic case, we plot in Figure 3 the phase portrait (first for and then in the classical case) and in Figure 4 the functions and . The phase portrait of the case and are quite similar. However, one can observe the following difference between the two phase portrait. In the classical case, it is well known that, if , the decreasing phase of starts as soon as . This is not true in the non-local case. Up to now, we are not able to determine a sufficient condition for the decreasing phase to start, but we can see in Figure 3 that the decreasing phase seems to start generally before reaches (the threshold is represented in the figure as the vertical dotted line). In any case, the phase portrait confirms the dogma shown in Proposition 3. Indeed, as , we can see from the phase portrait that is decreasing, while, as , the function is increasing for short times.
On the other hand, in Figure 4, we can see that the whole dynamics of the epidemic (in particular of the function represented in the plot) is delayed in the decreasing phase. Indeed, for with , one expects a power-law decay (of order ) in place of the exponential one for . This, for instance, can be seen in the generalization of the Hartmann–Grobmann theorem given in [19], which, however, is not applicable in our case since the equilibria are not hyperbolic.
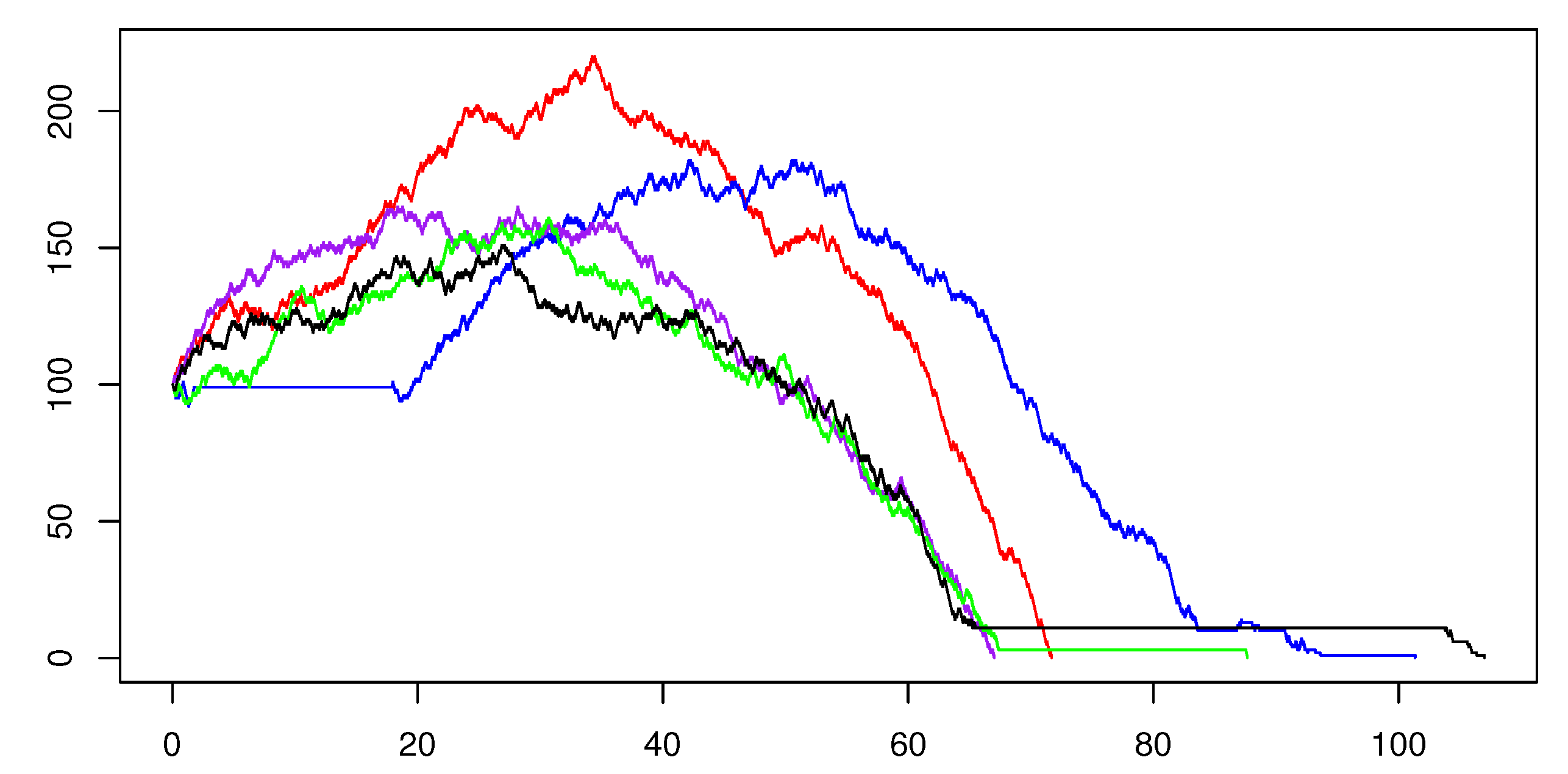
Concerning the stochastic model presented in Section 5, one can adapt Gillespie’s algorithm (see [56]) to the semi-Markov case, together with the fact that a procedure to simulate Mittag–Leffler random variables is known (see [57]). Such a procedure is, for instance, illustrated, for , in [58]. For other Bernstein functions, one could provide simulation procedures for random variables with distribution by using the fact that the Laplace transform is known (see [59]). In Figure 5, different simulated paths of the process are represented, all for (and ), , and (in such a way that ). As one can see, the sojourn times vary in length in such a way to produce some actually long constancy intervals. Let us indeed recall that, despite being almost surely finite, the sojourn times admit infinite mean, thus we can expect long sojourn times with non-negligible probability (even more in the case , since we know that decays as and then the sojourn times admit a power-law decay).
In Figure 6, we represent the trajectories of for , , , and , varying the values of and . We obtain something that reminds of the phase portraits in Figure 3.
Even though the shapes of the phase portraits are similar, the dynamics happen in different time-scales, as one can see in Figure 7.
Indeed, we show above that the large population limit of the time-changed continuous time Markov chain does not coincide with the solution of the non-local dynamical system (7). Numerical evidence of this loss of fluid limit is given in Table 1. Here, for a fixed time horizon , we consider the error function
8. Conclusions
Let us summarize here the main results and some observations that follow from them. In Section 3, we introduce a non-local generalization of the SIR model by simply substituting the classical derivative with a Caputo-type derivative. Despite the naive substitution, this new model exhibits some features that are more complicated to study. We are able to recover (in some form) the -dogma. However, the lack of semigroup property leads to some unexpected results. We do not have any sufficient condition for monotonicity of functions by knowing the sign of their Caputo-type derivative. The lack of such sufficient condition can also be seen from the phase portrait in Figure 3, as the maximum is reached in a region in which is still strictly positive. Let us indeed recall that the classical Fermat theorem on extremal points (see, e.g., [60] Theorem ) becomes an inequality in the non-local context (see, e.g., [61] Theorem 1 in the fractional case or [62] Proposition 2.2 in the general Caputo-type case), justifying the fact that, after the function reaches a maximum and starts decreasing, the non-local derivative could still be non-negative. Finally, let us observe that the lack of semigroup property can be overtaken by considering a deformation map , as shown in Appendix A, that takes in consideration the fact that the system remembers all its history.
On the other hand, in Section 5, we study the properties of a time-changed stochastic SIR model. In the linear context, time-changed processes provide the direct non-local counterpart of their parent process, as one can see, for instance, in [22,23,24,25,63,64], and many others. In the non-linear context, as for the SIR model, things can go differently. Indeed, even in the classical case, the equation of the expected value is affected by the non-linearity that appears as the covariance between the two components of the process. However, in the Markov case, we still have a fluid limit that links the deterministic case with the mean field dynamics of the stochastic case. In the time-changed case, this does not happen, as shown in Section 6. Thus, even though the time-changed SIR model preserves all the properties of the stationary state of the parent model and its forward Kolmogorov equations can be obtained from the parent’s one by considering a Caputo-type derivative in place of the classical one, the whole model cannot be directly seen as the stochastic counterpart of the non-local SIR model introduced in Section 3. All these observations and statements are then supported by numerical evidence, as shown in Section 7.
Finally, concerning modeling purposes, let us observe that the time-changed SIR model should be used only to model subdiffusive epidemics. Indeed, one could use a continuous mapping approach to prove that Löf’s diffusive approximation of the classical stochastic SIR model (see [5] and references therein) leads to a subdiffusive approximation of the time-changed SIR model. Thus, when working with time-changed models (including also fractional ones), one should always take in consideration the fact that such models exhibit an approximatively subdiffusive behavior and then should be used only in contextualization of such behavior with empirical evidence.
Funding
This research was funded by MIUR-PRIN 2017, project Stochastic Models for Complex Systems, No. 2017JFFHSH.
Conflicts of Interest
The author declares no conflict of interest.
Appendix A. Non-Local Dynamical Systems
Let us consider a function in , and the non-local equation
where . Let us suppose that, for any , Equation (A1) admits a unique continuous solution such that . In the classical case, we could introduce a flow function, i.e., a function such that is the unique solution of Equation (A1) for with and . This cannot be done for any . In the case , it is shown in [19] that there exists a deformation map such that .
Here, we want to show the same result for any Bernstein function , to extend the definition of flow of a dynamical system to the non-local case.
Theorem A1.
Let . Then, there exists a function such that
- 1.
- for any ;
- 2.
- For any and , it holds that , where is a map such that for andfor any and .
- 3.
- is continuous for fixed .
Proof.
Let us define as the unique continuous solution of Equation (A1) with . Then, we already have Properties and . Now, let us denote by the subset of such that is solution of Equation (A1). Then, we have that .
Now, we have to show Property . Let us observe that the map is uniquely defined by Equation (A2) and . Moreover, let us recall that, for any , it holds that
In particular, we have
References
- Kermack, W.O.; McKendrick, A.G. A contribution to the mathematical theory of epidemics. Proc. R. Soc. Lond. Ser. A Contain. Pap. Math. Phys. Charact. 1927, 115, 700–721. [Google Scholar]
- McKendrick, A. Applications of mathematics to medical problems. Proc. Edinb. Math. Soc. 1925, 44, 98–130. [Google Scholar] [CrossRef] [Green Version]
- Bailey, N.T. A simple stochastic epidemic. Biometrika 1950, 37, 193–202. [Google Scholar] [CrossRef] [Green Version]
- Daley, D.J.; Gani, J. Epidemic Modelling: An Introduction; Cambridge University Press: Cambridge, UK, 2001; Volume 15. [Google Scholar]
- Greenwood, P.E.; Gordillo, L.F. Stochastic epidemic modeling. In Mathematical and Statistical Estimation Approaches in Epidemiology; Springer: Berlin/Heidelberg, Germany, 2009; pp. 31–52. [Google Scholar]
- Ball, F. Susceptibility sets and the final outcome of collective Reed–Frost epidemics. Methodol. Comput. Appl. Probab. 2019, 21, 401–421. [Google Scholar] [CrossRef] [Green Version]
- Lefèvre, C.; Simon, M. SIR-Type Epidemic Models as Block-Structured Markov Processes. Methodol. Comput. Appl. Probab. 2019, 22, 433–453. [Google Scholar] [CrossRef]
- Ball, F.; Britton, T.; Leung, K.Y.; Sirl, D. A stochastic SIR network epidemic model with preventive dropping of edges. J. Math. Biol. 2019, 78, 1875–1951. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Zhang, Y.; Wang, Q. A stochastic SIR epidemic model with Lévy jump and media coverage. Adv. Differ. Equ. 2020, 2020, 70. [Google Scholar] [CrossRef] [Green Version]
- Buonomo, B.; Della Marca, R. Effects of information-induced behavioural changes during the COVID-19 lockdowns: The case of Italy. R. Soc. Open Sci. 2020, 7, 201635. [Google Scholar] [CrossRef]
- Bauch, C.; d’Onofrio, A.; Manfredi, P. Behavioral epidemiology of infectious diseases: An overview. In Modeling the Interplay Between Human Behavior and the Spread of Infectious Diseases; Springer: Berlin/Heidelberg, Germany, 2013; pp. 1–19. [Google Scholar]
- Manfredi, P.; D’Onofrio, A. Modeling the Interplay between Human Behavior and the Spread of Infectious Diseases; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Buonomo, B.; Della Marca, R. Oscillations and hysteresis in an epidemic model with information-dependent imperfect vaccination. Math. Comput. Simul. 2019, 162, 97–114. [Google Scholar] [CrossRef]
- Lefèvre, C.; Simon, M. SIR epidemics with stages of infection. Adv. Appl. Probab. 2016, 48, 768–791. [Google Scholar] [CrossRef]
- Diethelm, K. A fractional calculus based model for the simulation of an outbreak of dengue fever. Nonlinear Dyn. 2013, 71, 613–619. [Google Scholar] [CrossRef]
- dos Santos, J.P.C.; Cardoso, L.C.; Monteiro, E.; Lemes, N.H. A fractional-order epidemic model for bovine babesiosis disease and tick populations. In Abstract and Applied Analysis; Hindawi: London, UK, 2015; Volume 2015. [Google Scholar]
- Okyere, E.; Oduro, F.T.; Amponsah, S.K.; Dontwi, I.K.; Frempong, N.K. Fractional order SIR model with constant population. J. Adv. Math. Comput. Sci. 2016, 14, 1–12. [Google Scholar] [CrossRef]
- Mouaouine, A.; Boukhouima, A.; Hattaf, K.; Yousfi, N. A fractional order SIR epidemic model with nonlinear incidence rate. Adv. Differ. Equ. 2018, 2018, 160. [Google Scholar] [CrossRef]
- Li, C.; Ma, Y. Fractional dynamical system and its linearization theorem. Nonlinear Dyn. 2013, 71, 621–633. [Google Scholar] [CrossRef]
- Ahmed, E.; El-Sayed, A.; El-Saka, H.A. Equilibrium points, stability and numerical solutions of fractional-order predator–prey and rabies models. J. Math. Anal. Appl. 2007, 325, 542–553. [Google Scholar] [CrossRef] [Green Version]
- Angstmann, C.; Henry, B.; McGann, A. A fractional order recovery SIR model from a stochastic process. Bull. Math. Biol. 2016, 78, 468–499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ascione, G.; Leonenko, N.; Pirozzi, E. Non-Local Solvable Birth-Death Processes. arXiv 2020, arXiv:2007.13656. [Google Scholar]
- Ascione, G.; Leonenko, N.; Pirozzi, E. Fractional Immigration-Death Processes. arXiv 2019, arXiv:1907.07588. [Google Scholar] [CrossRef]
- Orsingher, E.; Polito, F. Fractional pure birth processes. Bernoulli 2010, 16, 858–881. [Google Scholar] [CrossRef]
- Orsingher, E.; Polito, F. On a fractional linear birth–death process. Bernoulli 2011, 17, 114–137. [Google Scholar] [CrossRef]
- Toaldo, B. Convolution-type derivatives, hitting-times of subordinators and time-changed C0-semigroups. Potential Anal. 2015, 42, 115–140. [Google Scholar] [CrossRef] [Green Version]
- Kochubei, A.N. General fractional calculus, evolution equations, and renewal processes. Integral Equ. Oper. Theory 2011, 71, 583–600. [Google Scholar] [CrossRef] [Green Version]
- Ascione, G. Generalized Cauchy problems for special convolutionary derivatives. arXiv 2020, arXiv:2006.09789. [Google Scholar]
- Alves, S.B.; de Oliveira, G.F., Jr.; de Oliveira, L.C.; de Silans, T.P.; Chevrollier, M.; Oriá, M.; Cavalcante, H.L.d.S. Characterization of diffusion processes: Normal and anomalous regimes. Phys. A Stat. Mech. Appl. 2016, 447, 392–401. [Google Scholar] [CrossRef]
- Danis, K.; Epaulard, O.; Bénet, T.; Gaymard, A.; Campoy, S.; Bothelo-Nevers, E.; Bouscambert-Duchamp, M.; Spaccaferri, G.; Ader, F.; Mailles, A.; et al. Cluster of coronavirus disease 2019 (Covid-19) in the French Alps, 2020. Clin. Infect. Dis. 2020. [Google Scholar] [CrossRef] [Green Version]
- Shim, E.; Tariq, A.; Choi, W.; Lee, Y.; Chowell, G. Transmission potential and severity of COVID-19 in South Korea. Int. J. Infect. Dis. 2020. [Google Scholar] [CrossRef]
- Schilling, R.L.; Song, R.; Vondracek, Z. Bernstein Functions: Theory and Applications; Walter de Gruyter: Berlin, Germany, 2012; Volume 37. [Google Scholar]
- Bertoin, J. Lévy Processes; Cambridge University Press: Cambridge, UK, 1996; Volume 121. [Google Scholar]
- Meerschaert, M.M.; Scheffler, H.P. Triangular array limits for continuous time random walks. Stoch. Process. Appl. 2008, 118, 1606–1633. [Google Scholar] [CrossRef] [Green Version]
- Kochubei, A.N.; Kondratiev, Y. Growth equation of the general fractional calculus. Mathematics 2019, 7, 615. [Google Scholar] [CrossRef] [Green Version]
- Kolokol’tsov, V.N. Mixed Fractional Differential Equations and Generalized Operator-Valued Mittag-Leffler Functions. Math. Notes 2019, 106, 740–756. [Google Scholar] [CrossRef]
- Bingham, N.H. Limit theorems for occupation times of Markov processes. Z. Wahrscheinlichkeitstheorie Verwandte Geb. 1971, 17, 1–22. [Google Scholar] [CrossRef]
- Meerschaert, M.M.; Toaldo, B. Relaxation patterns and semi-Markov dynamics. Stoch. Process. Appl. 2019, 129, 2850–2879. [Google Scholar] [CrossRef] [Green Version]
- Odibat, Z.M.; Shawagfeh, N.T. Generalized Taylor’s formula. Appl. Math. Comput. 2007, 186, 286–293. [Google Scholar] [CrossRef]
- Whittle, P. The outcome of a stochastic epidemic—A note on Bailey’s paper. Biometrika 1955, 42, 116–122. [Google Scholar]
- Reinert, G. A threshold theorem for the general stochastic epidemic via a discrete approach. Stat. Probab. Lett. 1992, 14, 85–90. [Google Scholar] [CrossRef]
- Çinlar, E. Markov additive processes. I. Z. Wahrscheinlichkeitstheorie Verwandte Geb. 1972, 24, 85–93. [Google Scholar] [CrossRef]
- Çinlar, E. Markov additive processes. II. Z. Wahrscheinlichkeitstheorie Verwandte Geb. 1972, 24, 95–121. [Google Scholar] [CrossRef]
- Cinlar, E. Markov Additive Processes and Semi-Regeneration; Technical Report, Discussion Paper; No 118, Discussion Papers from Northwestern University, Center for Mathematical Studies in Economics and Management Science: Evanston, IL, USA, 1974. [Google Scholar]
- Meerschaert, M.M.; Straka, P. Semi-Markov approach to continuous time random walk limit processes. Ann. Probab. 2014, 42, 1699–1723. [Google Scholar] [CrossRef] [Green Version]
- Kurtz, T.G. Solutions of ordinary differential equations as limits of pure jump Markov processes. J. Appl. Probab. 1970, 7, 49–58. [Google Scholar] [CrossRef]
- Allen, L.J. Stochastic Population and Epidemic Models; Mathematical Biosciences Lecture Series; Stochastics in Biological Systems; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Armbruster, B.; Beck, E. An elementary proof of convergence to the mean-field equations for an epidemic model. IMA J. Appl. Math. 2017, 82, 152–157. [Google Scholar] [CrossRef] [Green Version]
- Armbruster, B.; Beck, E. Elementary proof of convergence to the mean-field model for the SIR process. J. Math. Biol. 2017, 75, 327–339. [Google Scholar] [CrossRef] [Green Version]
- Lasry, J.M.; Lions, P.L. Jeux à champ moyen. i–le cas stationnaire. C. R. Math. 2006, 343, 619–625. [Google Scholar] [CrossRef]
- Lasry, J.M.; Lions, P.L. Jeux à champ moyen. ii–horizon fini et contrôle optimal. C. R. Math. 2006, 343, 679–684. [Google Scholar] [CrossRef]
- Ascione, G.; Pirozzi, E.; Toaldo, B. On the exit time from open sets of some semi-Markov processes. Ann. Appl. Probab. 2020, 30, 1130–1163. [Google Scholar] [CrossRef]
- Whitt, W. Stochastic-Process Limits: An Introduction to Stochastic-Process Limits and Their Application to Queues; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019. [Google Scholar]
- Garrappa, R. Numerical solution of fractional differential equations: A survey and a software tutorial. Mathematics 2018, 6, 16. [Google Scholar] [CrossRef] [Green Version]
- Gillespie, D.T. A general method for numerically simulating the stochastic time evolution of coupled chemical reactions. J. Comput. Phys. 1976, 22, 403–434. [Google Scholar] [CrossRef]
- Meerschaert, M.M.; Sikorskii, A. Stochastic Models for Fractional Calculus; Walter de Gruyter: Berlin, Germany, 2011; Volume 43. [Google Scholar]
- Ascione, G. Simulation of an α-Stable Time-Changed SIR Model. In International Conference on Computer Aided Systems Theory; Springer: Berlin/Heidelberg, Germany, 2019; pp. 220–227. [Google Scholar]
- Ridout, M.S. Generating random numbers from a distribution specified by its Laplace transform. Stat. Comput. 2009, 19, 439. [Google Scholar] [CrossRef]
- Apostol, T. Mathematical Analysis; Addison-Wesley: Boston, MA, USA, 1974. [Google Scholar]
- Luchko, Y. Maximum principle for the generalized time-fractional diffusion equation. J. Math. Anal. Appl. 2009, 351, 218–223. [Google Scholar] [CrossRef] [Green Version]
- Ascione, G.; Mishura, Y.; Pirozzi, E. The Fokker-Planck equation for the time-changed fractional Ornstein-Uhlenbeck process. Fract. Calc. Appl. Anal. 2020, 23, 450–483. [Google Scholar] [CrossRef]
- Leonenko, N.N.; Meerschaert, M.M.; Sikorskii, A. Fractional pearson diffusions. J. Math. Anal. Appl. 2013, 403, 532–546. [Google Scholar] [CrossRef]
- Ascione, G.; Leonenko, N.; Pirozzi, E. Non-Local Pearson diffusions. arXiv 2020, arXiv:2009.12086. [Google Scholar]
Figure 1.
Schematization of the model with linear force of infection and without population dynamics.
Figure 1.
Schematization of the model with linear force of infection and without population dynamics.

Figure 2.
Schematization of a node for the stochastic model without population dynamics.

Figure 3.
Phase portraits of for , first for and then for . In each case, and . The discretization time interval is given by .
Figure 3.
Phase portraits of for , first for and then for . In each case, and . The discretization time interval is given by .

Figure 4.
The function for : in blue for and in red for , both for (and ), , and . The discretization time interval is given by .
Figure 4.
The function for : in blue for and in red for , both for (and ), , and . The discretization time interval is given by .

Figure 5.
Plots of simulated trajectories of , with , , , , , and . The discretization time interval is given by .
Figure 5.
Plots of simulated trajectories of , with , , , , , and . The discretization time interval is given by .

Figure 6.
Phase portrait of as , , and . The time interval is obtained by where and . The expectations are approximated by means of averages of simulated sample paths of and with discretization time interval .
Figure 6.
Phase portrait of as , , and . The time interval is obtained by where and . The expectations are approximated by means of averages of simulated sample paths of and with discretization time interval .

Figure 7.
In red, the plot of for , , , and . In blue, the plot of for , , , and . For both plots, the discretization time interval is given by . The expected value is approximated by means of the average of simulated sample paths.
Figure 7.
In red, the plot of for , , , and . In blue, the plot of for , , , and . For both plots, the discretization time interval is given by . The expected value is approximated by means of the average of simulated sample paths.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The values of as N varies for different values of , , , and for the deterministic case (while for the stochastic one and ), as well as and for the deterministic case (while for the stochastic one ). The discretization time interval is given by .
Table 1.
The values of as N varies for different values of , , , and for the deterministic case (while for the stochastic one and ), as well as and for the deterministic case (while for the stochastic one ). The discretization time interval is given by .
| N | 1000 | 5000 | 10,000 | 50,000 | 100,000 | 500,000 | |
| N | 1000 | 5000 | 10,000 | 50,000 | 100,000 | 500,000 | |
| N | 1000 | 5000 | 10,000 | 50,000 | 100,000 | 500,000 | |
| N | 1000 | 5000 | 10,000 | 50,000 | 100,000 | 500,000 | |
| N | 1000 | 5000 | 10,000 | 50,000 | 100,000 | 500,000 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ascione, G. On the Construction of Some Deterministic and Stochastic Non-Local SIR Models. Mathematics 2020, 8, 2103. https://doi.org/10.3390/math8122103
AMA Style
Ascione G. On the Construction of Some Deterministic and Stochastic Non-Local SIR Models. Mathematics. 2020; 8(12):2103. https://doi.org/10.3390/math8122103
Chicago/Turabian StyleAscione, Giacomo. 2020. "On the Construction of Some Deterministic and Stochastic Non-Local SIR Models" Mathematics 8, no. 12: 2103. https://doi.org/10.3390/math8122103
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.