Optimizing the Low-Carbon Flexible Job Shop Scheduling Problem with Discrete Whale Optimization Algorithm


Abstract
:1. Introduction
2. Problem Definition and Formulation
2.1. Problem Definition
- (1)
- All jobs and machines are available at the initial time.
- (2)
- Any machine that can process more than one job at the same time is not permitted.
- (3)
- Interruption of processing process of any operation is not permitted.
- (4)
- Setup times of the machines and transportation time of the jobs are ignored.
- (5)
- Jobs are mutually independent.
2.2. Problem Formulation
- : Number of jobs.
- : Number of machines.
- : Number of operations of job .
- : The jth operation of job .
- : Processing time of operation on machine .
- : Processing cost per unit time of operation on machine .
- : Energy consumption cost per unit time of operation on machine .
- : Energy consumption cost per unit time of machine on the standby mode.
- : Completion time of machine .
- : Workload of machine .
- : Start time of operation .
- : Completion time of operation .
- : A big constant.
- : A 0–1 variable, if is processed on machine , ; otherwise, .
- : A 0–1 variable, if is processed on machine prior to , = 1; otherwise, = 0.
3. Whale Optimization Algorithm
3.1. Exploitation and Exploration
3.2. Exploration Phase
4. Discrete Whale Optimization Algorithm
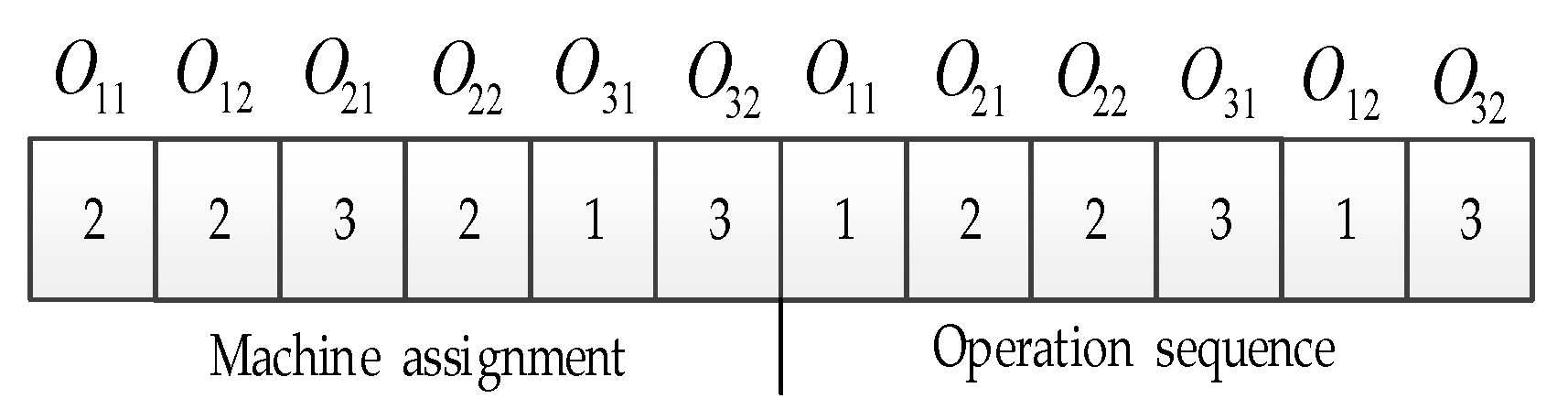
4.1. Encoding Mechanism
- (1)
- Read the operation sequence from left to right, and determine the machine number for each operation.
- (2)
- The first operation in the operation sequence string is processed first at the earliest available time on the assigned machine. The second operation is scheduled in the same way, and so on. Repetition of this procedure and a scheduling scheme can be achieved.
4.2. Population Initialization
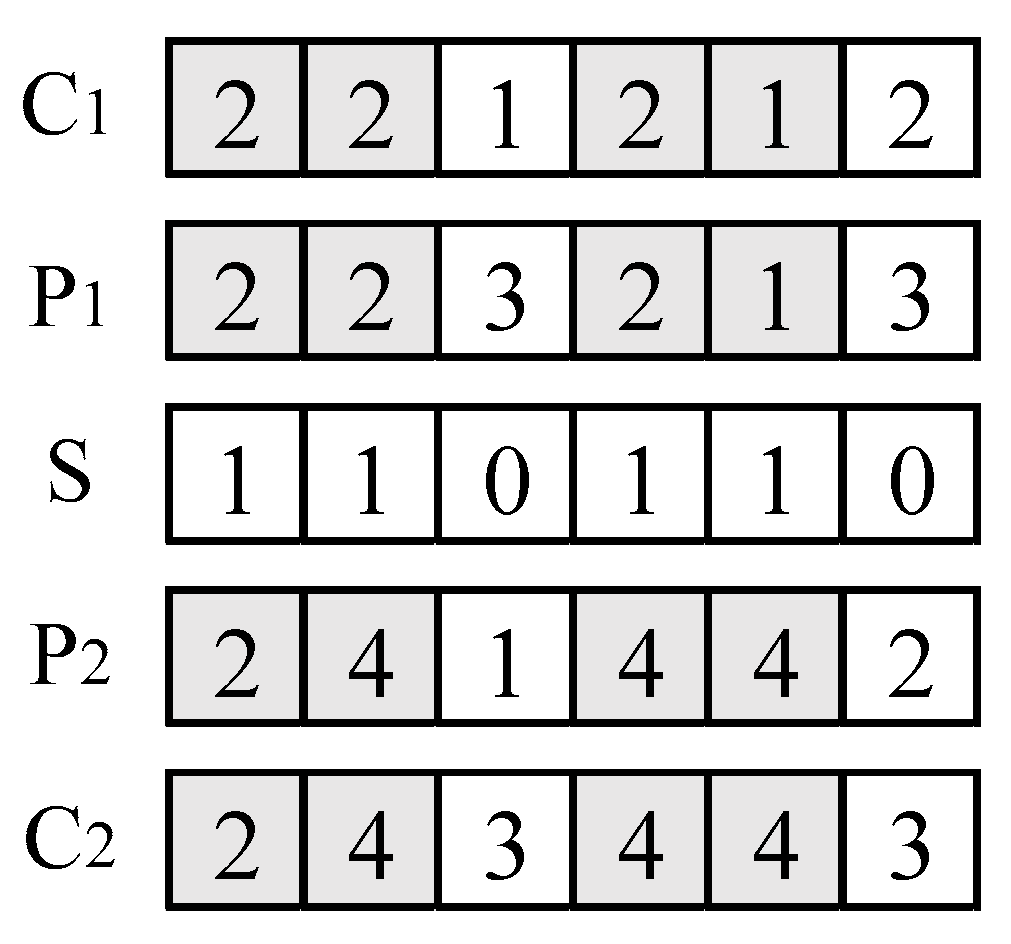
4.3. Discrete Encircling of the Prey
4.4. Discrete Spiral Updating Mechanism
4.5. Discrete Searching for the Prey
4.6. Dynamic Adjustment Strategy of a
4.7. Variable Neighborhood Search
4.8. Procedure of Discrete Whale Optimization Algorithm
5. Computational Experiment
5.1. Experimental Settings
5.2. Effectiveness of Dynamic Adjustment of the Parameter a
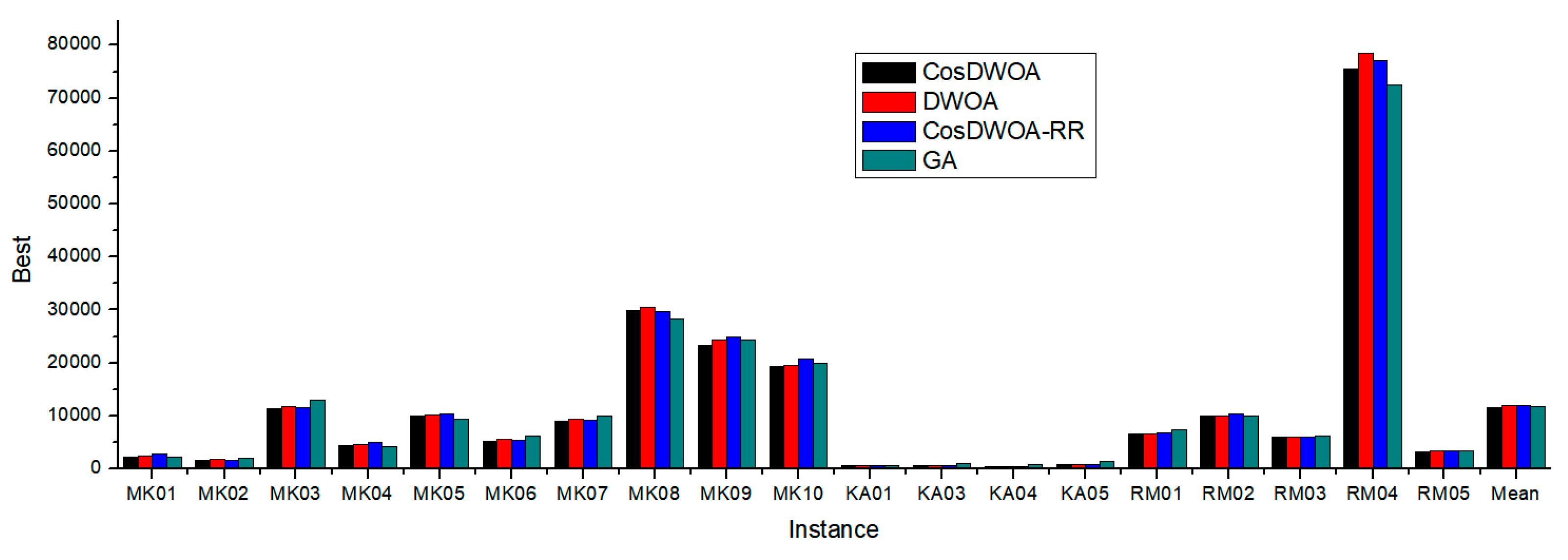
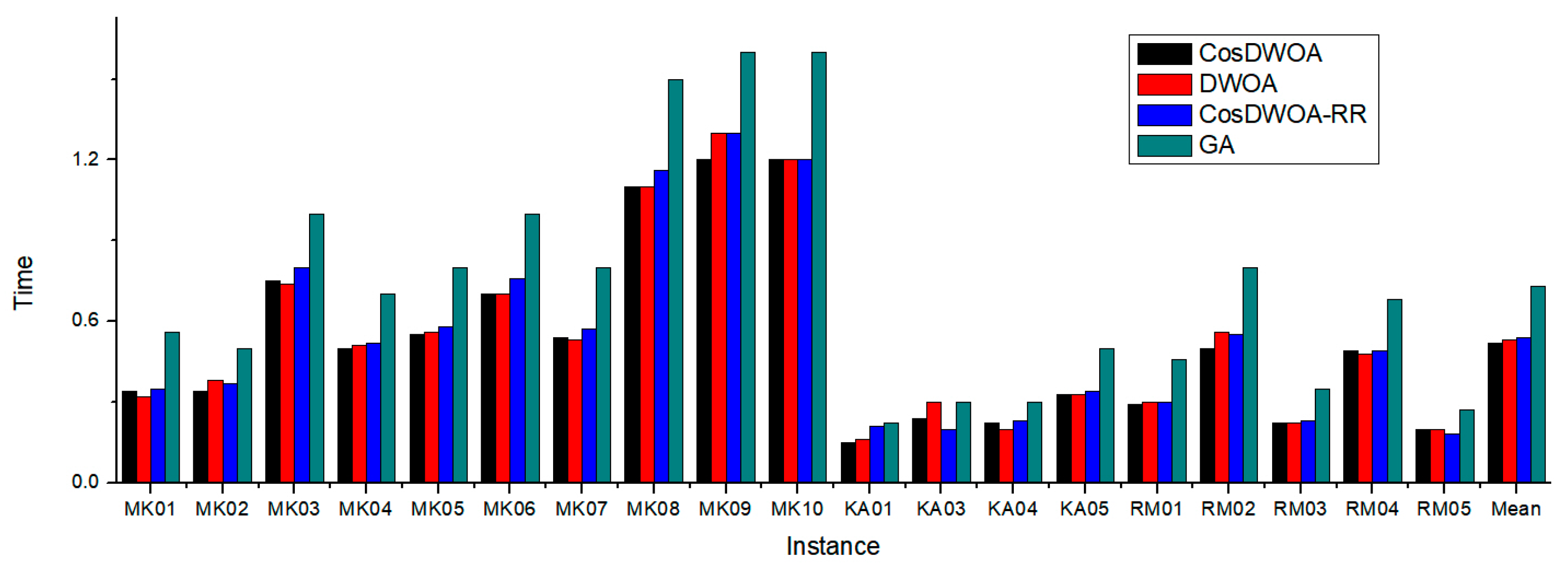
5.3. Effectiveness Analysis of Improvement Strategies
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dai, M.; Tang, D.; Giret, A.; Salido, M.A.; Li, W.D. Energy efficient scheduling for a flexible flowshop using an improved genetic-simulated annealing algorithm. Robot. Comput. Int. Manuf. 2013, 29, 418–429. [Google Scholar] [CrossRef]
- Ding, J.Y.; Song, S.; Wu, C. Carbon-efficient scheduling of flow shops by multi-objective optimization. Eur. J. Oper. Res. 2016, 248, 758–771. [Google Scholar] [CrossRef]
- Mansouri, S.A.; Aktas, E.; Besikci, U. Green scheduling of a two-machine flowshop: Trade-off between makespan and energy consumption. Eur. J. Oper. Res. 2016, 248, 772–788. [Google Scholar] [CrossRef] [Green Version]
- Luo, H.; Du, B.; Huang, G.Q.; Chen, H.; Li, X. Hybrid flow shop scheduling considering machine electricity consumption cost. Int. J. Prod. Econ. 2013, 146, 423–439. [Google Scholar] [CrossRef]
- Zhang, R.; Chiong, R. Solving the energy-efficient job shop scheduling problem: A multi-objective genetic algorithm with enhanced local search for minimizing the total weighted tardiness and total energy consumption. J. Clean. Prod. 2016, 112, 3361–3375. [Google Scholar] [CrossRef]
- Liu, G.S.; Zhang, B.X.; Yang, H.D.; Chen, X.; Huang, G.Q. A branch-and-bound algorithm for minimizing the energy consumption in the PFS problem. Math. Probl. Eng. 2013, 2013, 546810. [Google Scholar] [CrossRef]
- Li, J.Q.; Sang, H.Y.; Han, Y.Y.; Wang, C.G.; Gao, K.Z. Efficient multi-objective optimization algorithm for hybrid flow shop scheduling problems with setup energy consumptions. J. Clean. Prod. 2018, 181, 584–598. [Google Scholar] [CrossRef]
- Salido, M.A.; Escamilla, J.; Giret, A.; Barber, F. A genetic algorithm for energy-efficiency in job-shop scheduling. Int. J. Adv. Manuf. Technol. 2016, 85, 1303–1314. [Google Scholar] [CrossRef]
- Brucker, P.; Schlie, R. Job-shop scheduling with multi-purpose machines. Computing 1990, 45, 369–375. [Google Scholar] [CrossRef]
- Kaskavelis, C.A.; Caramanis, M.C. Efficient Lagrangian relaxation algorithms for industry size job-shop scheduling problems. IIE Trans. 1998, 30, 1085–1097. [Google Scholar] [CrossRef]
- Chen, H.; Chu, C.; Proth, J.M. An improvement of the Lagrangian relaxation approach for job shop scheduling: A dynamic programming method. IEEE Trans. Robot Autom. 1998, 14, 786–795. [Google Scholar] [CrossRef]
- Ríos-Mercado, R.Z.; Bard, J.F. Computational experience with a branch-and-cut algorithm for flowshop scheduling with setups. Comput. Oper. Res. 1998, 25, 351–366. [Google Scholar] [CrossRef]
- Karimi-Nasab, M.; Modarres, M. Lot sizing and job shop scheduling with compressible process times: A cut and branch approach. Comput. Ind. Eng. 2015, 85, 196–205. [Google Scholar] [CrossRef]
- Dauzere-Peres, S.; Paulli, J. An integrated approach for modeling and solving the general multi-processor job-shop scheduling problem using tabu search. Ann. Oper. Res. 1997, 70, 281–306. [Google Scholar] [CrossRef]
- Li, J.Q.; Pan, Q.K.; Suganthan, P.N. A hybrid tabu search algorithm with an efficient neighborhood structure for the flexible job shop scheduling problem. Int. J. Adv. Manuf. Technol. 2011, 52, 683–697. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, G.; Xu, Y.; Wang, S.; Liu, M. An effective artificial bee colony algorithm for the flexible job-shop scheduling problem. Int. J. Adv. Manuf. Technol. 2012, 60, 303–315. [Google Scholar] [CrossRef]
- Liouane, N.; Saad, I.; Hammadi, S.; Borne, P. Ant systems and local search optimization for flexible job shop scheduling production. Int. J. Comput. Commun. Control 2007, 2, 174–184. [Google Scholar] [CrossRef]
- Yuan, Y.; Xu, H.; Yang, J.D. A hybrid harmony search algorithm for the flexible job shop scheduling problem. Appl. Soft. Comput. 2013, 13, 3259–3272. [Google Scholar] [CrossRef]
- Li, X.; Gao, L. An effective hybrid genetic algorithm and tabu search for flexible job shop scheduling problem. Int. J. Prod. Econ. 2016, 174, 93–110. [Google Scholar] [CrossRef]
- Yin, L.; Li, X.; Gao, L.; Lu, C.; Zhang, Z. A novel mathematical model and multi-objective method for the low-carbon flexible job shop scheduling problem. Sustain. Comput. Inform. 2017, 13, 15–30. [Google Scholar] [CrossRef]
- Xiong, W.; Fu, D. A new immune multi-agent system for the flexible job shop scheduling problem. J. Intell. Manuf. 2018, 29, 857–873. [Google Scholar] [CrossRef]
- Piroozfard, H.; Wong, K.Y.; Wong, W.P. Minimizing total carbon footprint and total late work criterion in flexible job shop scheduling by using an improved multi-objective genetic algorithm. Resour. Conserv. Recycl. 2018, 128, 267–283. [Google Scholar] [CrossRef]
- Mokhtari, H.; Hasani, A. An energy-efficient multi-objective optimization for flexible job-shop scheduling problem. Comput. Chem. Eng. 2017, 104, 339–352. [Google Scholar] [CrossRef]
- Shen, L.; Dauzère-Pérès, S.; Neufeld, J.S. Solving the flexible job shop scheduling problem with sequence-dependent setup times. Eur. J. Oper. Res. 2018, 265, 503–516. [Google Scholar] [CrossRef]
- Zandieh, M.; Khatami, A.R.; Rahmati, S.H.A. Flexible job shop scheduling under condition-based maintenance: Improved version of imperialist competitive algorithm. Appl. Soft. Comput. 2017, 58, 449–464. [Google Scholar] [CrossRef]
- Nouiri, M.; Bekrar, A.; Jemai, A.; Niar, S.; Ammari, A.C. An effective and distributed particle swarm optimization algorithm for flexible job-shop scheduling problem. J. Intell. Manuf. 2018, 29, 603–615. [Google Scholar] [CrossRef]
- Wu, X.; Wu, S. An elitist quantum-inspired evolutionary algorithm for the flexible job-shop scheduling problem. J. Intell. Manuf. 2017, 28, 1441–1457. [Google Scholar] [CrossRef]
- Jiang, T.H.; Deng, G.L. Optimizing the low-carbon flexible job shop scheduling problem considering energy consumption. IEEE Access. 2018, 6, 46346–46355. [Google Scholar] [CrossRef]
- Jiang, T.H.; Zhang, C. Application of grey wolf optimization for solving combinatorial problems: Job shop and flexible job shop scheduling cases. IEEE Access. 2018, 6, 26231–26240. [Google Scholar] [CrossRef]
- Jiang, T.H.; Zhang, C.; Sun, Q. Green job shop scheduling problem with discrete whale optimization algorithm. IEEE Access. 2019, 7, 43153–43166 . [Google Scholar] [CrossRef]
- Sharma, N.; Sharma, H. Beer froth artificial bee colony algorithm for job shop scheduling problem. Appl. Soft. Comput. 2018, 68, 507–524. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Soft. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Medani, K.B.O.; Sayah, S.; Bekrar, A. Whale optimization algorithm based optimal reactive pow-er dispatch: A case study of the Algerian power system. Electr. Power Syst. Res. 2018, 163, 696–705. [Google Scholar] [CrossRef]
- Mafarja, M.M.; Mirjalili, S. Hybrid Whale Optimization Algorithm with simulated annealing for feature selection. Neurocomputing 2017, 260, 302–312. [Google Scholar] [CrossRef]
- Aziz, M.A.E.; Ewees, A.A.; Hassanien, A.E. Whale Optimization Algorithm and Moth-Flame Optimization for multilevel thresholding image segmentation. Expert Syst. Appl. 2017, 83, 242–256. [Google Scholar] [CrossRef]
- Oliva, D.; Aziz, M.A.E.; Hassanien, A.E. Parameter estimation of photovoltaic cells using an improved chaotic whale optimization algorithm. Appl. Energy 2017, 200, 141–154. [Google Scholar] [CrossRef]
- Jiang, T.H.; Zhang, C.; Zhu, H.Q.; Zhu, H.Q.; Gu, J.C.; Deng, G.L. Energy-efficient scheduling for a job shop using an improved whale optimization algorithm. Mathematics 2018, 6, 220. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; El-Shahat, D.; Sangaiah, A.K. A modified nature inspired meta-heuristic whale optimization algorithm for solving 0–1 knapsack problem. Int. J. Mach. Learn. Cybern. 2019, 10, 495–514. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Manogaran, G.; El-Shahat, D.; Mirjalili, S. A hybrid whale optimization algorithm based on local search strategy for the permutation flow shop scheduling problem. Future Gener. Comp. Syst. 2018, 85, 129–145. [Google Scholar] [CrossRef]
- Zhang, G.H.; Gao, L.; Li, P.G.; Zhang, C.Y. Improved genetic algorithm for the flexible job shop scheduling problem. J. Mech. Eng. 2009, 45, 145–151. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, C.Y.; Dong, X.; Wang, X.J.; Li, X.Y.; Liu, Q. Improved NSGA-II for the multi-objective flexible job-shop scheduling problem. J. Mech. Eng. 2010, 46, 156–164. (In Chinese) [Google Scholar] [CrossRef]
- Wang, L.; Cai, J.C.; Shi, X. Multi-objective flexible job shop energy-saving scheduling problem based on improved genetic algorithm. J. Nanjing Univ. Sci. Technol. Nat. Sci. 2017, 41, 494–502. (In Chinese) [Google Scholar]
- Brandimarte, P. Routing and scheduling in a flexible job shop by tabu search. Ann. Oper. Res. 1993, 41, 157–183. [Google Scholar] [CrossRef]
- Kacem, I.; Hammadi, S.; Borne, P. Approach by localization and multiobjective evolutionary optimization for flexible job-shop scheduling problems. IEEE. Trans. Syst. Man Cyber. Part C Appl. Rev. 2002, 32, 1–13. [Google Scholar] [CrossRef]
- Kozan, E.; Liu, S.Q. An Operational-Level Multi-Stage Mine Production Timetabling Model for Optimally Synchronising Drilling, Blasting and Excavating Operations. Int. J. Min. Reclam. Environ. 2017, 31, 457–474. [Google Scholar] [CrossRef]
- Liu, S.Q.; Kozan, E. Scheduling trains as a blocking parallel-machine job shop scheduling problem. Comput. Oper. Res. 2009, 36, 2840–2852. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.Q.; Kozan, E. Scheduling trains with priorities: A no-wait blocking parallel-machine job-shop scheduling model. Transp. Sci. 2011, 45, 175–198. [Google Scholar] [CrossRef]
- Liu, S.Q.; Kozan, E. A hybrid shifting bottleneck procedure algorithm for the parallel-machine job-shop scheduling problem. J. Oper. Res. Soc. 2012, 63, 168–182. [Google Scholar] [CrossRef]
- Liu, S.Q.; Kozan, E. A hybrid metaheuristic algorithm to optimise a real-world robotic cell. Comput. Oper. Res. 2017, 84, 188–194. [Google Scholar] [CrossRef]
- Masoud, M.; Kozan, E.; Kent, G.; Liu, S.Q. An integrated approach to optimise sugarcane rail operations. Comput. Ind. Eng. 2016, 98, 211–220. [Google Scholar] [CrossRef] [Green Version]
- Masoud, M.; Kozan, E.; Kent, G.; Liu, S.Q. A new constraint programming approach for optimising a coal rail system. Optim. Lett. 2017, 11, 725–738. [Google Scholar] [CrossRef]
- Mousavi, A.; Kozan, E.; Liu, S.Q. Open-pit block sequencing optimization: A mathematical model and solution technique. Eng. Optim. 2016, 48, 1932–1950. [Google Scholar] [CrossRef]
- Yan, P.; Che, A.; Levner, E.; Liu, S.Q. A heuristic for inserting randomly arriving jobs into an existing hoist schedule. IEEE Trans. Autom. Sci. Eng. 2017, 15, 1423–1430. [Google Scholar] [CrossRef]
- Yan, P.; Liu, S.Q.; Sun, T.; Ma, K. A dynamic scheduling approach for optimizing the material handling operations in a robotic cell. Comput. Oper. Res. 2018, 99, 166–177. [Google Scholar] [CrossRef]
- Liu, S.Q.; Kozan, E. Parallel-identical-machine job-shop scheduling with different stage-dependent buffering requirements. Comput. Oper. Res. 2016, 74, 31–41. [Google Scholar] [CrossRef]
- Liu, S.Q.; Kozan, E.; Masoud, M.; Zhang, Y.; Chan, F.T.S. Job shop scheduling with a combination of four buffering constraints. Int. J. Prod. Res. 2018, 56, 3274–3293. [Google Scholar] [CrossRef]
- Yan, P.; Liu, S.Q.; Yang, C.; Masoud, M. A comparative study on three graph-based constructive algorithms for multi-stage scheduling with blocking. J. Ind. Manag. Optim. 2019, 15, 221–233. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | DF | SS | MS | F | p-Value |
|---|---|---|---|---|---|
| Factor | 4 | 17.99411 | 4.49853 | 0.67969 | 0.60748 |
| Error | 109 | 721.41302 | 6.61847 | ||
| Total | 113 | 739.40713 |
| Source | DF | SS | MS | F | p-Value |
|---|---|---|---|---|---|
| Factor | 2 | 1175.80737 | 587.90368 | 13.31722 | 1.17311 × 10−5 |
| Error | 73 | 3222.66733 | 44.14613 | - | - |
| Total | 75 | 4398.47469 | - | - | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luan, F.; Cai, Z.; Wu, S.; Liu, S.Q.; He, Y. Optimizing the Low-Carbon Flexible Job Shop Scheduling Problem with Discrete Whale Optimization Algorithm. Mathematics 2019, 7, 688. https://doi.org/10.3390/math7080688
Luan F, Cai Z, Wu S, Liu SQ, He Y. Optimizing the Low-Carbon Flexible Job Shop Scheduling Problem with Discrete Whale Optimization Algorithm. Mathematics. 2019; 7(8):688. https://doi.org/10.3390/math7080688
Chicago/Turabian StyleLuan, Fei, Zongyan Cai, Shuqiang Wu, Shi Qiang Liu, and Yixin He. 2019. "Optimizing the Low-Carbon Flexible Job Shop Scheduling Problem with Discrete Whale Optimization Algorithm" Mathematics 7, no. 8: 688. https://doi.org/10.3390/math7080688