1. Introduction
Let
H be a real Hilbert space. We study the following inclusion problem: find
such that
where
is an operator and
is a set-valued operator.
If
and
, where
is the gradient of
F and
G is the subdifferential of
G which is defined by
Then problem (
1) becomes the following minimization problem:
To solve the inclusion problem via fixed-point theory, let us define, for
, the mapping
as follows:
It is known that solutions of the inclusion problem involving
A and
B can be characterized via the fixed-point equation:
which suggests the following iteration process:
and
where
.
Xu [
1] and Kamimura-Takahashi [
2] introduced the following inexact iteration process:
and
where
and
Strong convergence was proved under some mild conditions. This scheme was also investigated subsequently by [
3,
4,
5] with different conditions. In [
6], Yao-Noor proposed the generalized version of the scheme (
6) as follows:
and
where
with
and
The strong convergence is discussed with some suitable conditions. Recently, Wang-Cui [
7] also studied the contraction-proximal point algorithm (
7) by the relaxed conditions on parameters:
and either
or
Takahashi et al. [
8] introduced the following Halpern-type iteration process:
and
where
A is an
-inverse strongly monotone operator on
H and
B is a maximal monotone operator on
H. They proved that
defined by (
8) strongly converges to zeroes of
if the following conditions hold:
- (i)
- (ii)
- (iii)
- (iv)
Takahashi et al. [
8] also studied the following iterative scheme:
and
where
and
. They proved that
defined by (
9) strongly converges to zeroes of
if the following conditions hold:
- (i)
- (ii)
- (iii)
- (iv)
There have been, in the literature, many methods constructed to solve the inclusion problem for maximal monotone operators in Hilbert or Banach spaces; see, for examples, in [
9,
10,
11].
Let
C be a nonempty, closed, and convex subset in a Hilbert space
H and let
T be a nonexpansive mapping of
C into itself, that is,
for all
. We denote by
the set of fixed points of
T.
The iteration procedure of Mann’s type for approximating fixed points of a nonexpansive mapping
T is the following:
and
where
is a sequence in
.
On the other hand, the iteration procedure of Halpern’s type is the following:
and
where
is a sequence in
.
Recently, Takahashi et al. [
12] proved the following theorem for solving the inclusion problem and the fixed-point problem of nonexpansive mappings.
Theorem 1. [12] Let C be a closed and convex subset of a real Hilbert space H. Let A be an α-inverse strongly monotone mapping of C into H and let B be a maximal monotone operator on H such that the domain of B is included in C. Let be the resolvent of B for and let T be a nonexpansive mapping of C into itself such that . Let and let be a sequence generated byfor all , where and satisfy.
Then converges strongly to a point of .
In this paper, motivated by Takahashi et al. [
13] and Halpern [
14], we introduce an iteration of finding a common point of the set of fixed points of nonexpansive mappings and the set of inclusion problems for inverse strongly monotone mappings and maximal monotone operators by using the inertial technique (see, [
15,
16]). We then prove strong and weak convergence theorems under suitable conditions. Finally, we provide some numerical examples to support our iterative methods.
2. Preliminaries
In this section, we provide some basic concepts, definitions, and lemmas which will be used in the sequel. Let
H be a real Hilbert space with inner product
and norm
. When
is a sequence in
H,
implies that
converges weakly to
x and
means the strong convergence. In a real Hilbert space, we have
for all
and
We know the following Opial’s condition:
if
and
.
Let
C be a nonempty, closed, and convex subset of a Hilbert space
H. The nearest point projection of
H onto
C is denoted by
, that is,
for all
and
. The operator
is called the metric projection of
H onto
C. We know that the metric projection
is firmly nonexpansive, for all
or equivalently
It is well known that
is characterized by the inequality, for all
and
In a real Hilbert space
H, we have the following equality:
and the subdifferential inequality
for all
.
Let
. A mapping
is said to be
-inverse strongly monotone iff
for all
.
A mapping
is said to be a contraction if there exists
such that
for all
.
Let B be a mapping of H into . The effective domain of B is denoted by , that is, . A multi-valued mapping B is said to be a monotone operator on H iff for all , and . A monotone operator B on H is said to be maximal iff its graph is not strictly contained in the graph of any other monotone operator on H. For a maximal monotone operator B on H and we define a single-valued operator , which is called the resolvent of B for r.
Lemma 1. [17] Let and be sequences of nonnegative real numbers such thatwhere is a sequence in and is a real sequence. Assume Then the following results hold: - (i)
If for some then is a bounded sequence.
- (ii)
If and then
Lemma 2. [17] Let be a sequence of real numbers that does not decrease at infinity in the sense that there exists a subsequence of which satisfies for all . Define the sequence of integers as follows:where such that . Then, the following hold: - (i)
and ,
- (ii)
and .
Lemma 3. [18] Let H be a Hilbert space and a sequence in H such that there exists a nonempty set satisfying: - (i)
For every , exists.
- (ii)
Any weak cluster point of belongs to S.
Then, there exists such that weakly converges to .
Lemma 4. [18] Let and verify: - (i)
,
- (ii)
,
- (iii)
.
Then is a converging sequence and , where .
3. Strong Convergence Theorem
In this section, we are now ready to prove the strong convergence theorem in Hilbert spaces.
Theorem 2. Let C be a nonempty, closed, and convex subset of a real Hilbert space H. Let A be an α-inverse strongly monotone mapping of H into itself and let B be a maximal monotone operator on H such that the domain of B is included in C. Let be the resolvent of B for and let S be a nonexpansive mapping of C into itself such that . Let be a contraction. Let and let be a sequence generated byfor all , where and , where satisfy - (C1)
and
- (C2)
- (C3)
- (C4)
Then converges strongly to a point of
Proof. Let
. Then
for all
. It follows that by the firm nonexpansivity of
,
On the other hand, since
, it follows that
Hence
by (
27) and (
28).
Let
for all
. Then we obtain
By Lemma 1(i), we have that
is bounded. We see that
We next estimate the following:
Combining (
26) and (
31), we get
Combining (
30) and (
32), we obtain
From (
29) and (
33), we have
Set We next consider two cases.
Case 1: Suppose that there exists a natural number
N such that
for all
. In this case,
is convergent. From (
34) we obtain
Since
,
and
converges, we have
and
as
. We next show that
as
We see that
We next show that
as
. We see that
Since
is bounded, we can choose a subsequence
of
which converges weakly to a point
Suppose that
. Then by Opial’s Condition we obtain
This is a contradiction. Hence
. From
, we have
From
, we also have
Since
B is monotone, we have for
So, we have
which implies
Since
and
(since
), we have
and thus
. From (
35), we have
.
Since B is maximal monotone, we have Hence and thus we have .
We will show that
Sine
is bounded and
, there exists a subsequence
of
such that
Since by Lemma 1(ii) So .
Case 2: Suppose that there exists a subsequence
of the sequence
such that
for all
. In this case, we define
as in Lemma 2. Then, by Lemma 2, we have
. We see that
We know that
From (
36)–(
38), we have
and
Now repeating the argument of the proof in Case 1, we obtain
. We note that
So
This means
Hence
. It follows that
By Lemma 2, we have
. Thus, we obtain
Hence and thus This completes the proof. □
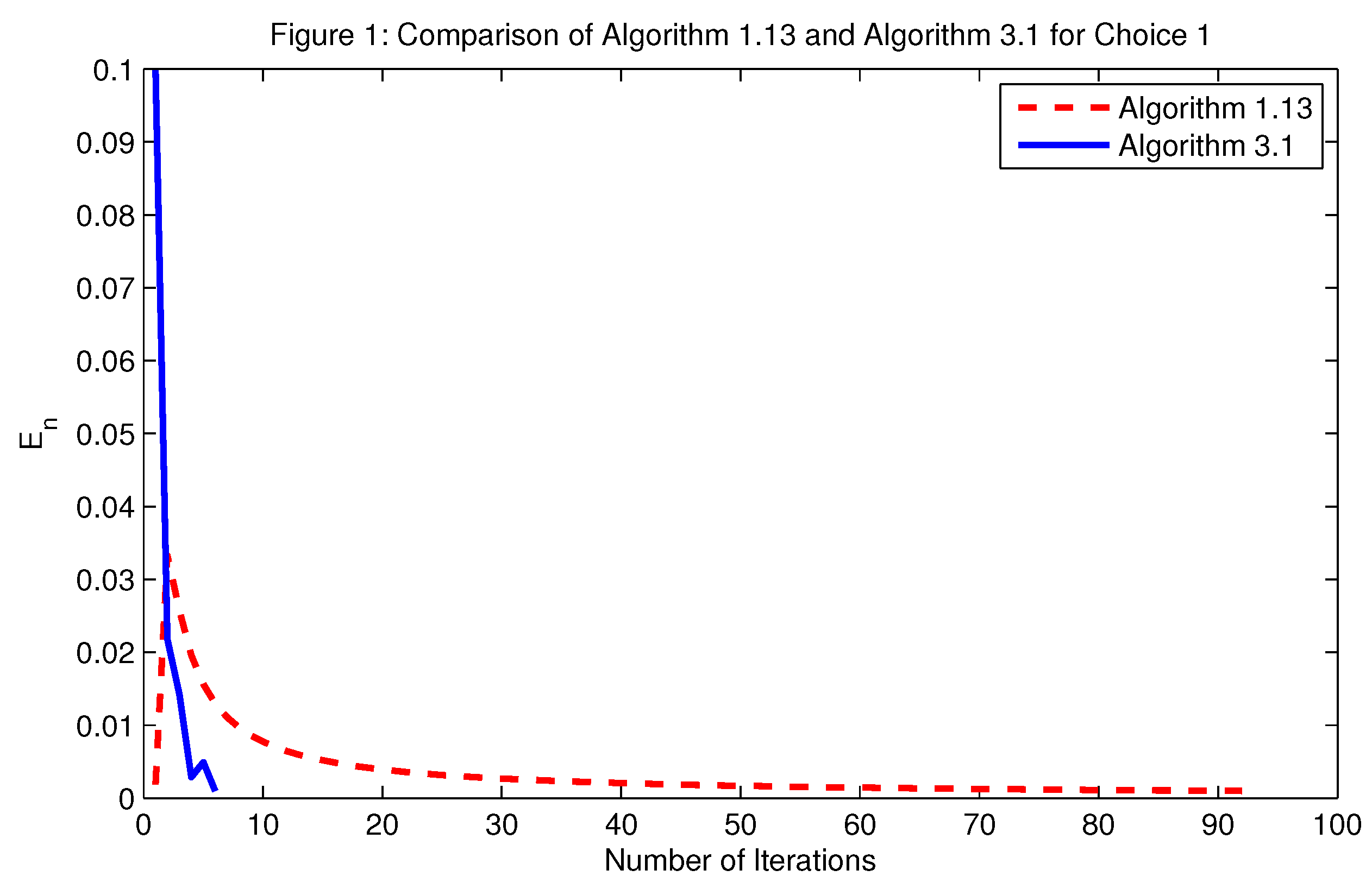
Remark 1. It is noted that the conditionis removed from Theorem TTT of Takahashi et al. [12]. Remark 2. [17] We remark here that the conditions (C4) is easily implemented in numerical computation since the valued of is known before choosing . Indeed, the parameter can be chosen such that , wherewhere is a positive sequence such that . 5. Numerical Examples
In this section, we give some numerical experiments to show the efficiency and the comparison with other methods.
Example 1. Solve the following minimization problem:where and the fixed-point problem of defined by For each
, we set
and
. Put
and
in Theorem 2. We can check that
F is convex and differentiable on
with 2-Lipschitz continuous gradient. Moreover,
G is convex and lower semi-continuous but not differentiable on
. We know that for
We choose
for all
and
For each
let
and define
as in Remark 2. The stopping criterion is defined by
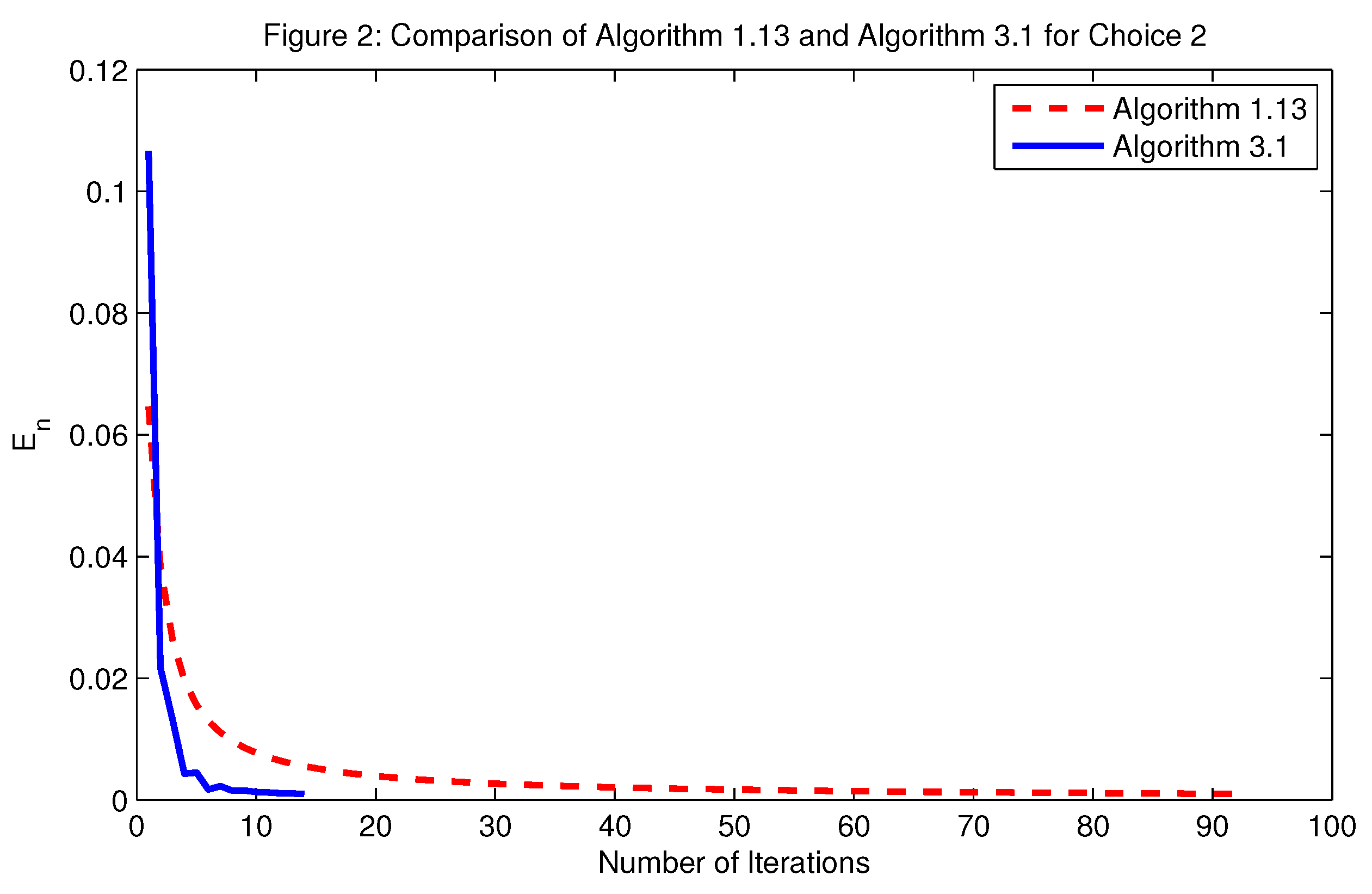
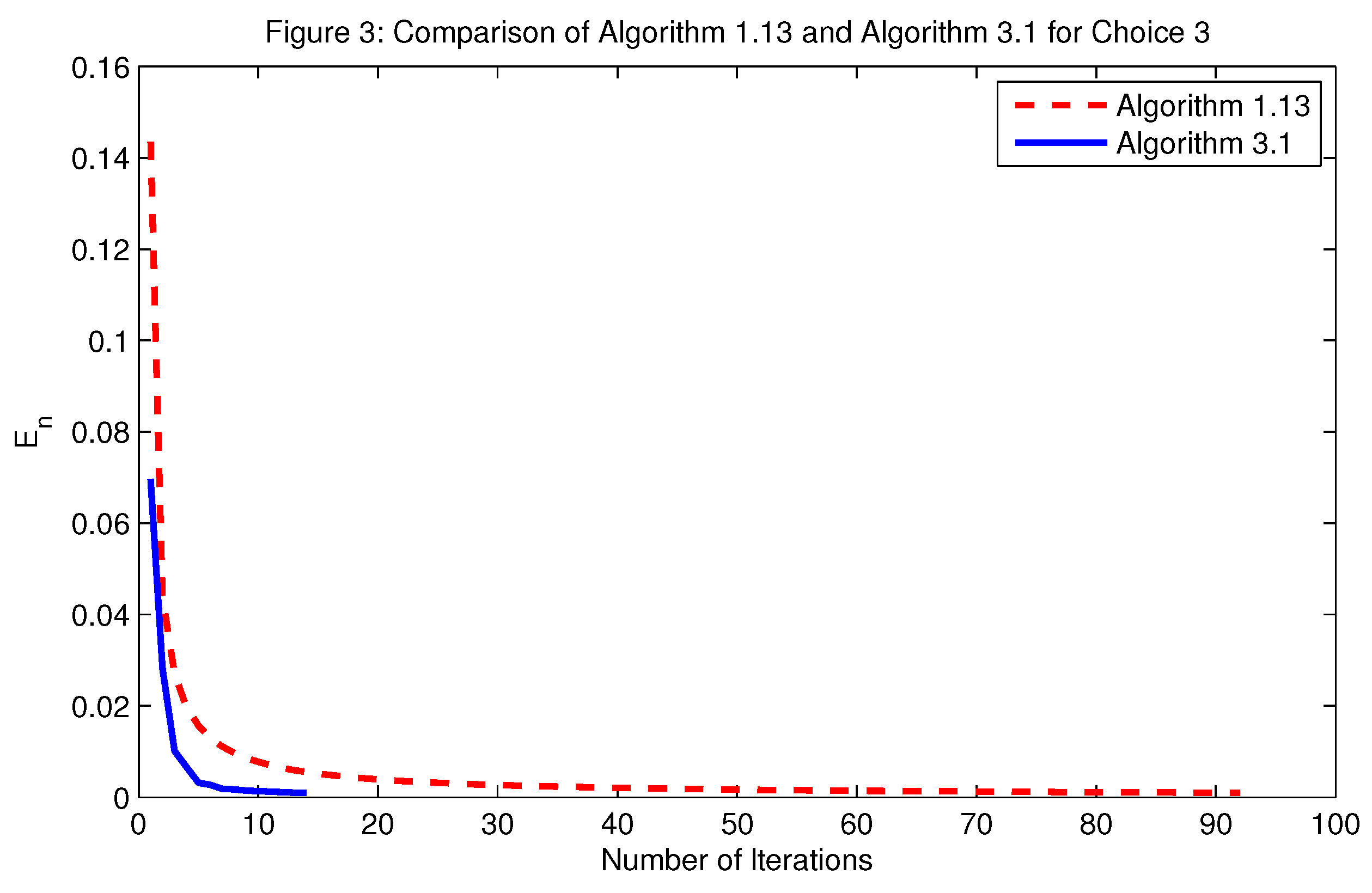
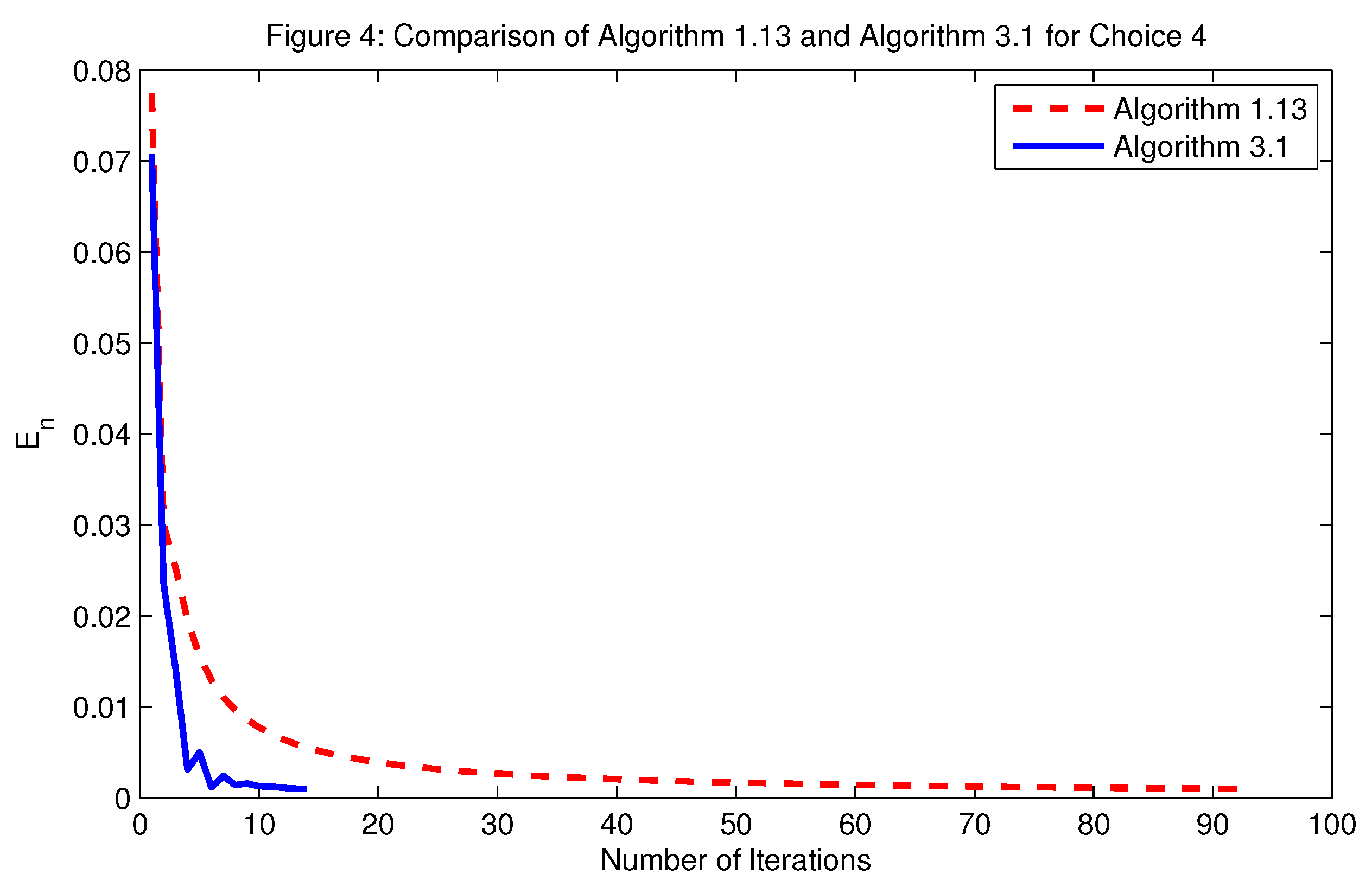
We now study the effect (in terms of convergence and the CPU time) and consider different choices of
and
as following, see
Table 1.
Choice 1: and ;
Choice 2: and ;
Choice 3: and ;
Choice 4: and .







{kind=link}
{kind=link}
{kind=link}
{kind=link}