1. Introduction
One of the best root-finding methods for solving nonlinear scalar equation
is Newton’s method. In recent years, numerous higher order iterative methods have been developed and analyzed for solving nonlinear equations that improve classical methods, such as Newton’s method (NM), Halley’s iteration method,
etc., which are respectively given below:
and:
The convergence order of Newton’s method is two, and it is optimal with two function evaluations. Halley’s iteration method has third order convergence with three function evaluations. Frequently,
is difficult to calculate and computationally more costly, and therefore,
in Equation (
2) is approximated using the finite difference; still, the convergence order and total number function evaluation are maintained [
1]. Such a third order method similar to Equation (
2) after approximating
in Halley’s iteration method is given below:
In the past decade, a few authors have proposed third order methods with three function evaluations free from
; for example, [
2,
3] and the references therein. The efficiency index (EI) of an iterative method is measured using the formula
, where
p is the local order of convergence and
d is the number of function evaluations per full iteration cycle. Kung–Traub [
4] conjectured that the order of convergence of any multi-point without the memory method with
d function evaluations cannot exceed the bound
, the “optimal order”. Thus, the optimal order for three evaluations per iteration would be four. Jarratt’s method [
5] is an example of an optimal fourth order method. Recently, some optimal and non-optimal multi-point methods have been developed in [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15] and the references therein. A non-optimal method [
16] has been recently rediscovered based on a quadrature formula, which can also be obtained by giving
in Equation (
3). In fact, each iterative fixed-point method produces a unique basins of attraction and fractal behavior, which can be used in the evaluation of algorithms [
17]. Polynomiography is defined to be the art and science of visualization in the approximation of zeros of complex polynomials, where the created polynomiography images satisfy the mathematical convergence properties of iteration functions.
This paper considers a new family of optimal fourth order methods, which is an improvement of the method given in [
16]. We study extraneous fixed points and basins of attraction for two particular cases of the new family of methods and a few equivalent available methods. The rest of the paper is organized as follows.
Section 2 presents the development of the methods, their convergence analysis and the extension of new fourth order methods to sixth and twelfth order.
Section 3 includes some numerical examples and results for the new family of methods along with some equivalent methods, including Newton’s method. In
Section 4, we obtain all possible extraneous fixed points for these methods as a special study. In
Section 5, we study basins of attraction for the proposed fourth order methods, Newton’s method and some existing methods.
Section 6 discusses an application on Planck’s radiation law problem. Finally,
Section 7 gives the conclusions of our work.
4. A Study on Extraneous Fixed Points
Definition 4. A point is a fixed point of R if
Definition 5. A point is called attracting if , repelling if and neutral if . If the derivative is also zero, then the point is super attracting.
It is interesting to note that all of the above discussed methods can be written as:
As per the definition,
is a fixed point of this method, since
. However, the points
at which
are also fixed points of the method, since
; the second term on the right side of Equation (
29) vanishes. Hence, these points
ξ are called extraneous fixed points.
Moreover, for a general iteration function given by:
the nature of extraneous fixed points can be discussed. Based on the nature of the extraneous fixed points, the convergence of the iteration process will be determined. For more details on this aspect, the paper by Vrcsay
et al. [
19] will be useful. In fact, they investigated that if the extraneous fixed points are attractive, then the method will give erroneous results. If the extraneous fixed points are repelling or neutral, then the method may not converge to a root near the initial guess.
In this section, we will discuss the extraneous fixed points of each method for the polynomial . As does not vanish in Theorem 6, there are no extraneous fixed points.
Theorem 6. There are no extraneous fixed points for Newton’s Method (1) and Method (4).
Theorem 7. There are six extraneous fixed points for Jarratt Method (22).
Proof. The extraneous fixed point of Jarratt method for which
are found. Upon substituting
, we get the equation
The extraneous fixed points are found to be
All of these fixed points are repelling (since
). ☐
Theorem 8. There are fifty two extraneous fixed points for Method (23).
Proof. We found for Method (
23),
The extraneous fixed points are at found to be
All of these fixed points are repelling (since ). ☐
Theorem 9. There are thirty nine extraneous fixed points for Method (24).
The extraneous fixed points are at
All of these fixed points are repelling (since ). ☐
Theorem 10. There are twenty four extraneous fixed points for Method (25).
Proof. We found for Method (
25),
The extraneous fixed points are found to be
All of these fixed points are repelling (since ). ☐
Theorem 11. There are eighteen extraneous fixed points for Method (26).
The extraneous fixed points are at
All of these fixed points are repelling (since ). ☐
Theorem 12. There are twelve extraneous fixed points for Method (27).
The extraneous fixed points are at
All of these fixed points are repelling (since ). ☐
Theorem 13. There are twenty four extraneous fixed points for Method (16).
The extraneous fixed points are at
All of these fixed points are repelling (since ). ☐
Theorem 14. There are thirty extraneous fixed points for Method (17).
The extraneous fixed points are at
All of these fixed points are repelling (since ). ☐
5. Basins of Attraction
Section 2 and
Section 3 discussed methods whose roots are in the real domain, that is
. The study can be extended to functions defined in the complex plane
having complex zeros. From the fundamental theorem of algebra, a polynomial of degree
n with real or complex coefficients has
n roots, which may or may not be distinct. In such a case, a complex initial guess is needed for the convergence of complex zeros. Note that we need some basic definitions in order to study functions for the complex domain with complex zeros. We give below some definitions required for our study, which are found in [
20,
21,
22]. Let
be a rational map on the Riemann sphere.
Definition 15. For , we define its orbit as the set
Definition 16. A periodic point of the period m is such that , where m is the smallest integer.
Definition 17. The Julia set of a nonlinear map denoted by is the closure of the set of its repelling periodic points. The complementary of is the Fatou set .
Definition 18. If O is an attracting periodic orbit of period m, we define the basins of attraction to be the open set consisting of all points for which the successive iterates converge towards some point of O.
Lemma 19. Every attracting periodic orbit is contained in the Fatou set of R. In fact, the entire basins of attraction A for an attracting periodic orbit is contained in the Fatou set. However, every repelling periodic orbit is contained in the Julia set.
In the following subsections, we produce some beautiful graphs obtained for the proposed methods and for some existing methods using MATLAB [
23,
24]. In fact, an iteration function is a mapping of the plane into itself. The common boundaries of these basins of attraction constitute the Julia set of the iteration function, and its complement is the Fatou set. This section is necessary in this paper to show how the proposed methods could be considered in polynomiography. In the following section, we describe the basins of attraction for Newton’s method and some higher order Newton type methods for finding complex roots of polynomials
and
.
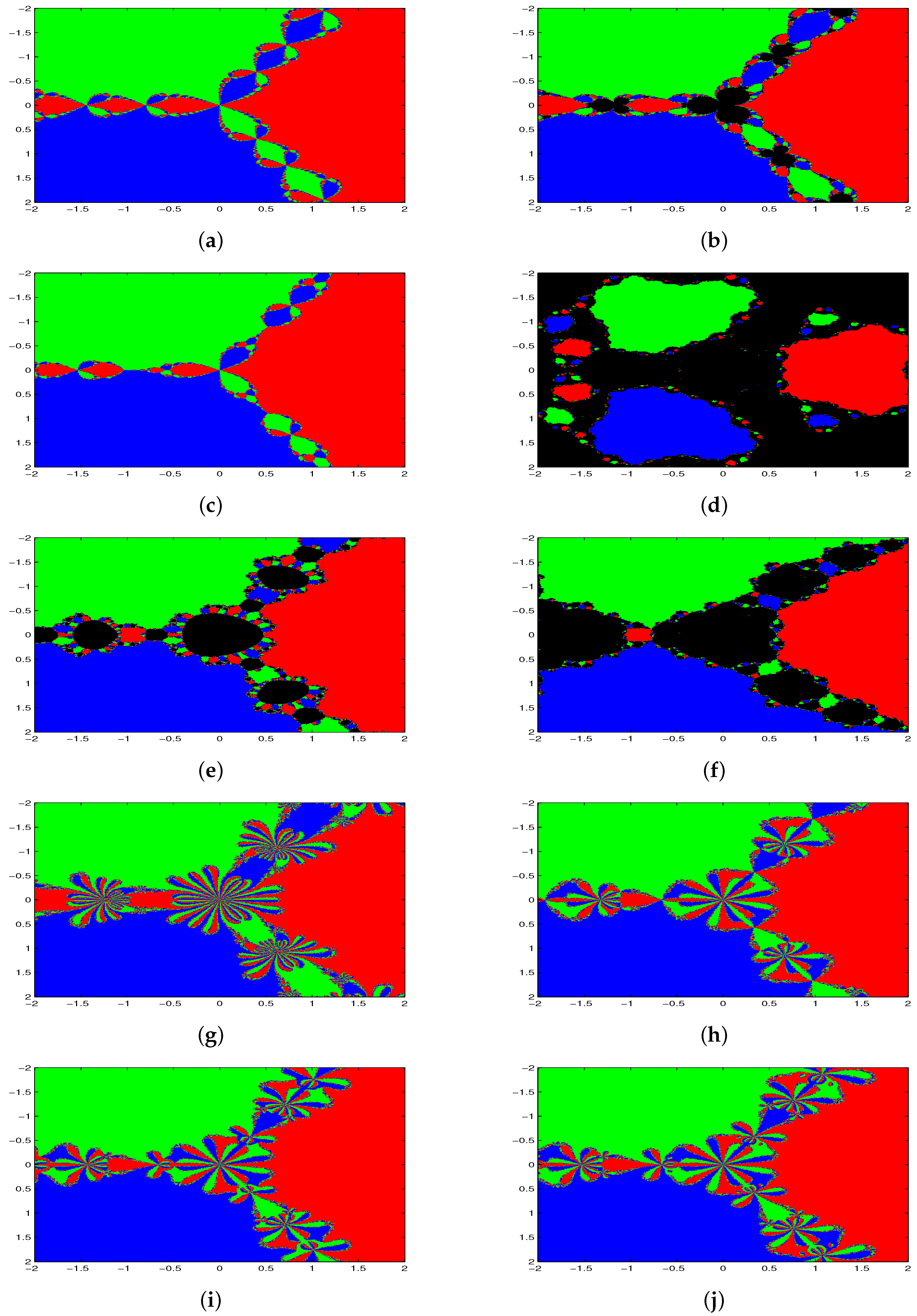
5.1. Polynomiographs of
We consider the square region
, and in this region, we have 160,000 equally-spaced grid points with mesh
. It is composed of 400 columns and 400 rows, which can be related to the pixels of a computer display, which would represent a region of the complex plane [
25]. Each grid point is used as an initial point
, and the number of iterations until convergence is counted for each point. Now, we draw the polynomiographs of
with roots
,
and
. We assign “red color” if each grid point converges to the root
, “green color” if they converge to the root
and “blue color” if they converge to the root
in at most 200 iterations and if
. In this way, the basins of attraction for each root would be assigned a characteristic color. If the iterations do not converge as per the above condition for some specific initial points, we assign “black color”.
Figure 1a–j shows the polynomiographs of the methods for the cubic polynomial
. There are diverging points for the method of Noor
et al., SBS1, SBS2 and SKK. All starting points are converging for the methods NM, JM, SJ, SKS, PM1 and PM2. In
Table 6, we classify the number of converging and diverging grid points for each iterative method. Note that a point
belongs to the Julia set if and only if the dynamics in a neighborhood of
displays sensitive dependence on the initial conditions, so that nearby initial conditions lead to wildly different behavior after a number of iterations. For this reason, some of the methods are getting many divergent points. The common boundaries of these basins of attraction constitute the Julia set of the iteration function.
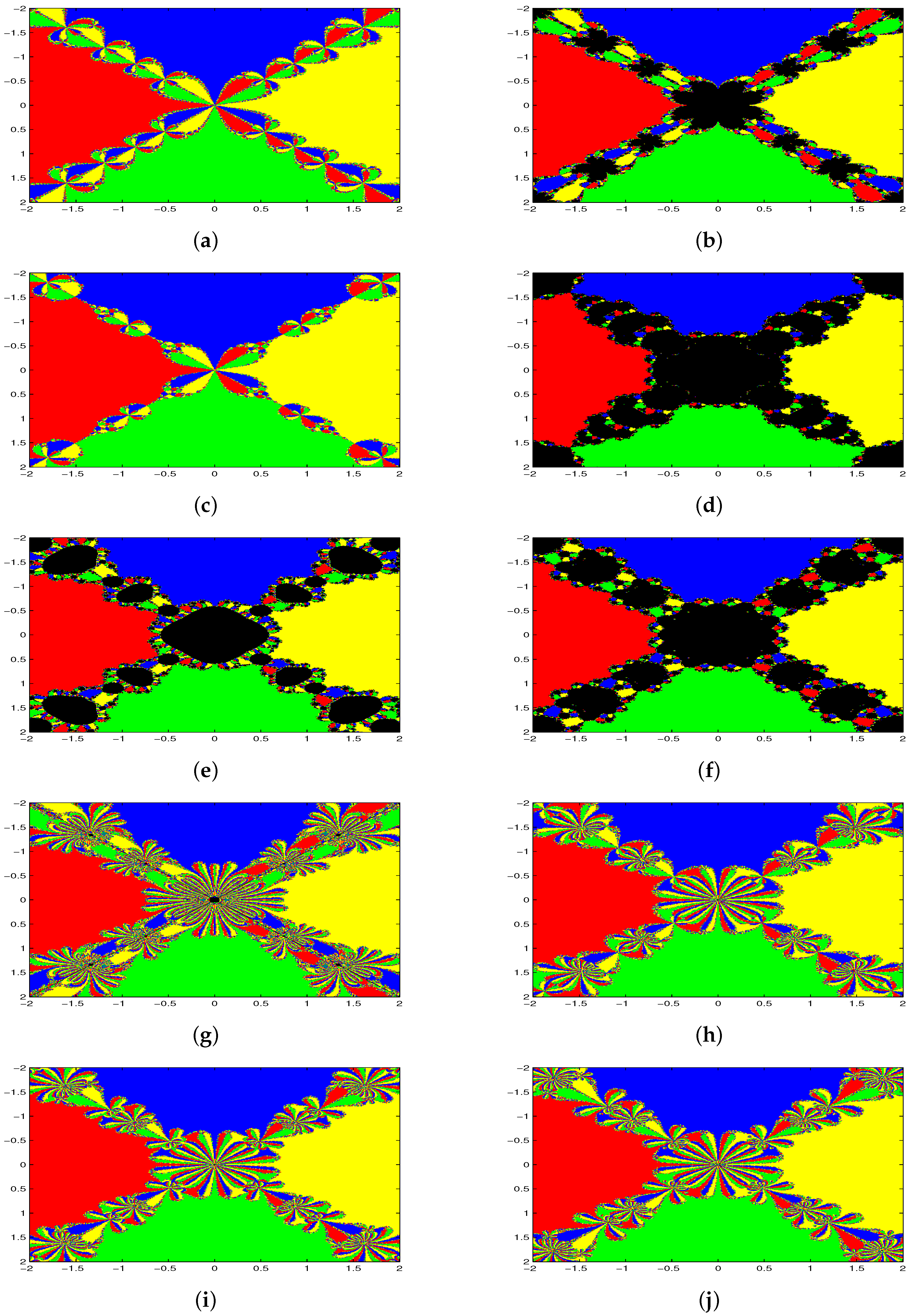
5.2. Polynomiographs of
Next, we draw the polynomiographs of with roots , , and . We assign yellow color if each grid point converges to the root , red color if they converge to the root , green color if they converge to the root and blue color if they converge to the root in at most 200 iterations and if . Therefore, the basins of attraction for each root would be assigned a corresponding color. If the iterations do not converge as per the above condition for some specific initial points, we assign black color.
Figure 2a–j shows the polynomiographs of the methods for the quartic polynomial
. There are diverging points for the method of Noor
et al., SBS1, SBS2, SKK, SJ, SKS, PM1 and PM2. All starting points are convergent for NM and JM. In
Table 7, we classify the number of converging and diverging grid points for each iterative methods. Furthermore, we observe that the SKS, PM1 and PM2 methods are divergent at a lesser number of grid points than the method of Noor
et al., SBS1, SBS2, SKK and SJ.
Table 8 shows that the proposed methods are better than or equal to other comparable methods with respect to the number of iterations, computational order convergence and error. All of the methods applied on the cubic and quartic polynomials
and
are convergent with real roots as the starting point.
From this comparison based on the basins of attractions for cubic and quartic polynomials, we could generally say that NM, JM, PM1 and PM2 are more reliable in solving nonlinear equations. Furthermore, by observing the polynomiographs of and , we find certain symmetrical patterns for the x-axis and y-axis, where the starting point leads to convergent real or complex pair of roots of the respective polynomials.






{kind=link}
{kind=link}