


Analysis of Higher-Order Bézier Curves for Approximation of the Static Magnetic Properties of NO Electrical Steels

Abstract
:1. Introduction
2. Mathematical Descriptions of Nonlinear Magnetic Properties
2.1. Analytic Functions
- —determines the value of the asymptote;
- —controls the slope of the curve;
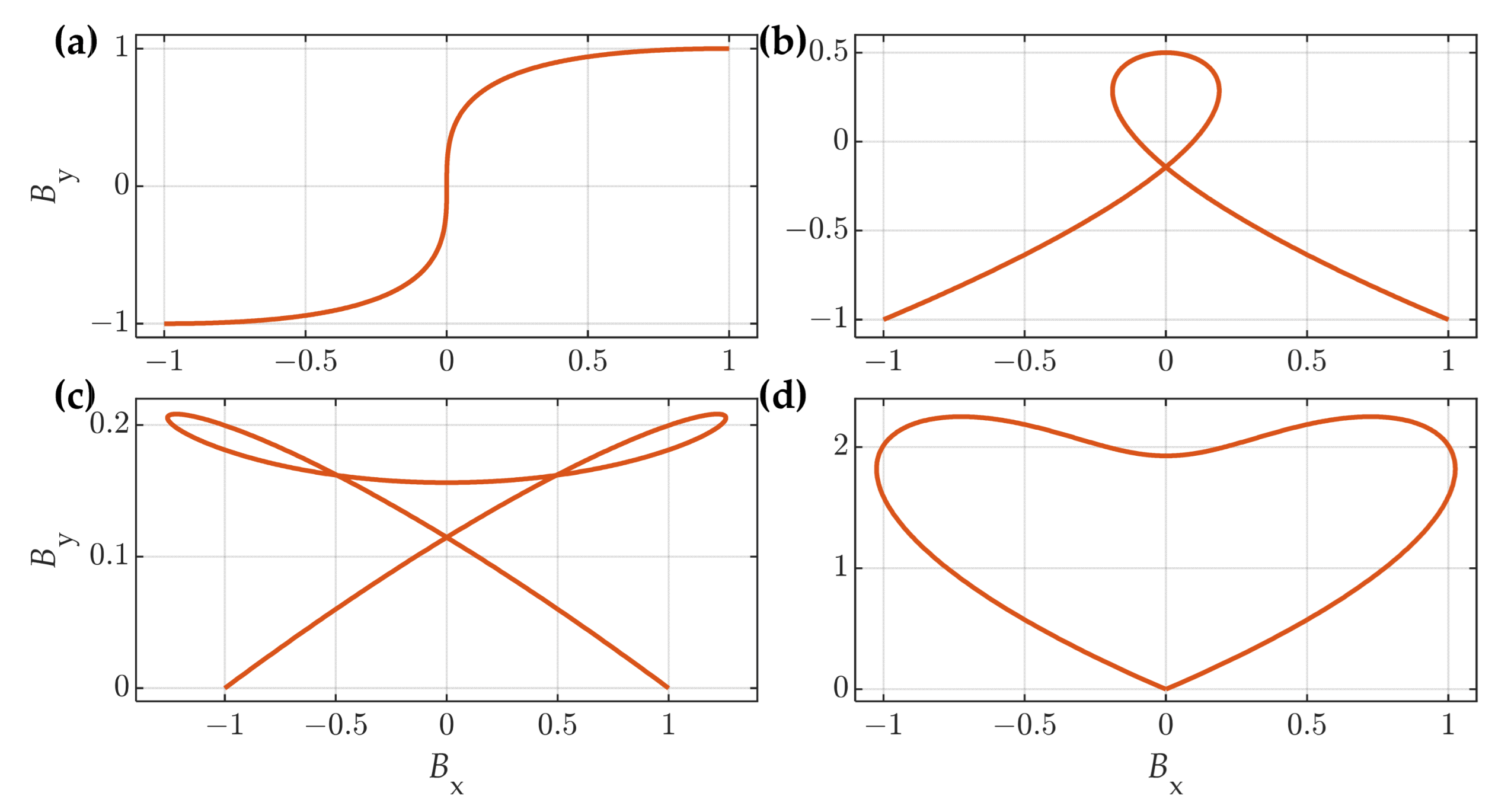
2.2. Bézier Curves
2.2.1. Properties of Bézier Curves
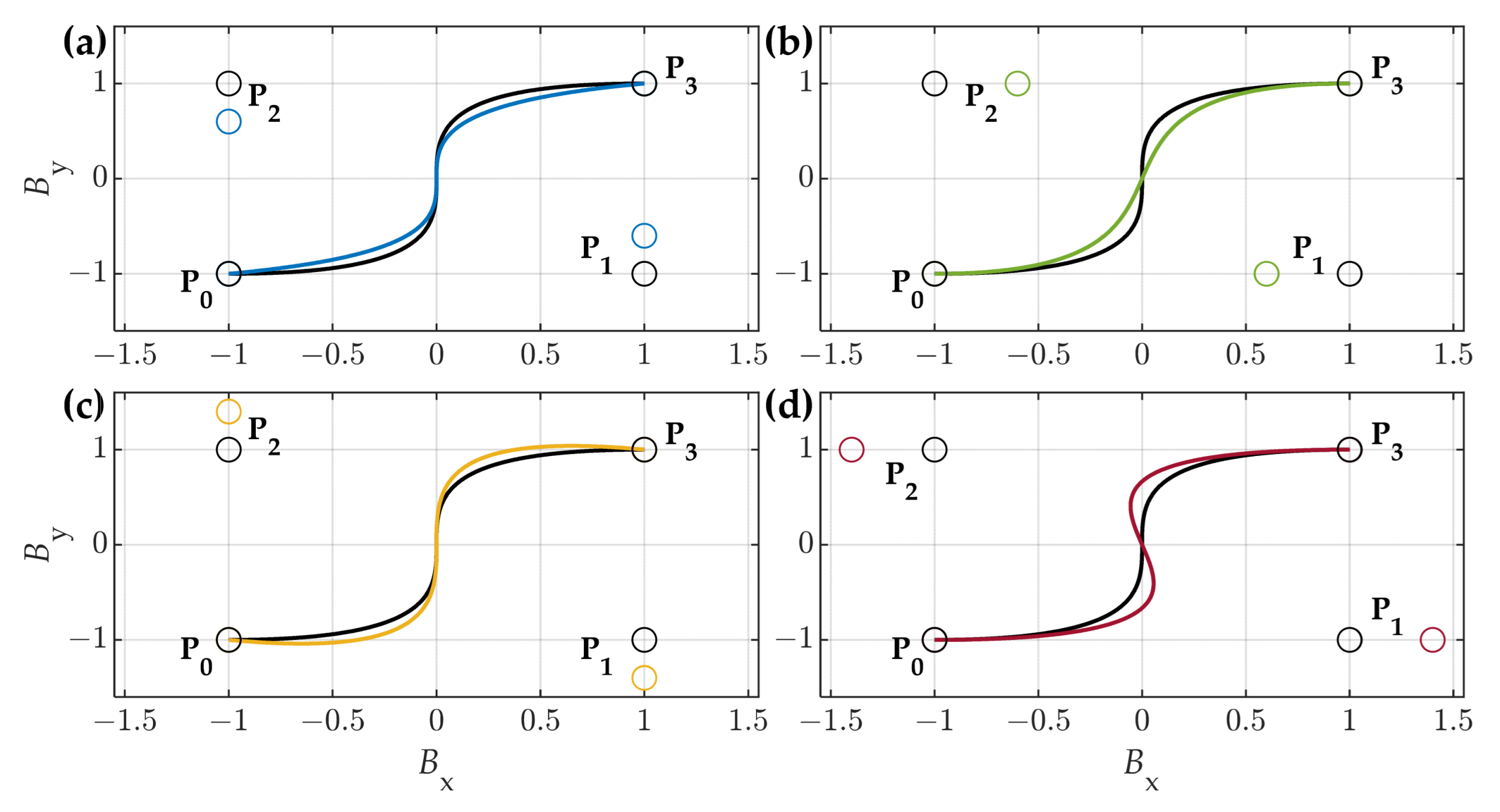
- First, control point defines the beginning, and the last control point defines the end of the curve.
- The tangent vector formed by the first two control points and defines the initial direction, and the tangent vector formed by the last two points defines the ending direction of the curve.
2.2.2. Impact of the Control Point’s Placement on the Bézier Curve
3. Methodology
3.1. Assumptions and Limitations
3.2. Measured Data
- (1)
- First magnetization curves;
- (2)
- Anhysteretic curves;
- (3)
- Descending branches of the major loops.
3.3. Definition of the Data Subsets and Evaluation (Sub)Regions
- (1)
- The high-permeability (HP) subregion ();
- (2)
- The saturation (SAT) subregion ();
- (3)
- The extrapolation (EXT) subregion ().
3.4. Curve Fitting
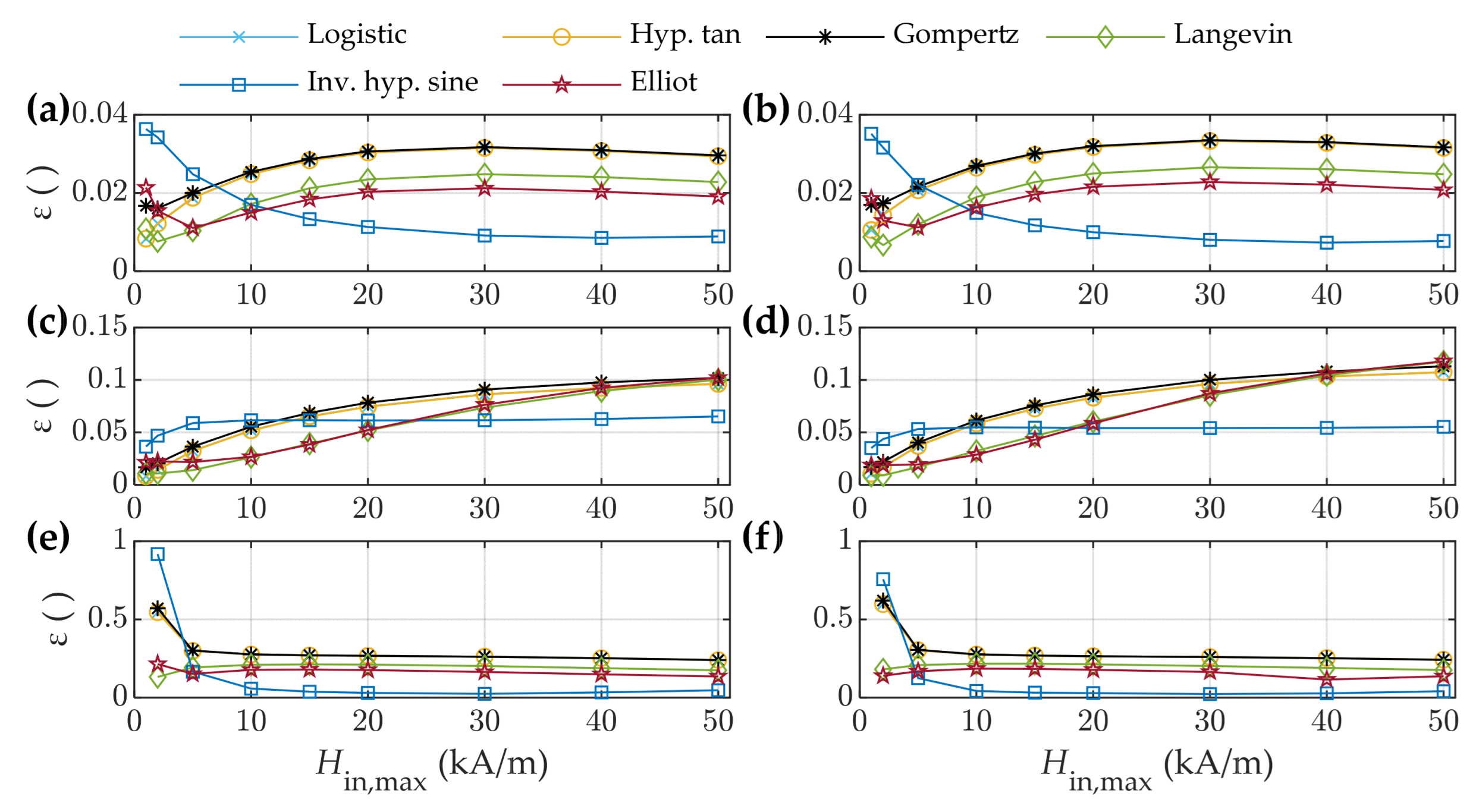
3.5. Evaluation of the Goodness of Fit
3.5.1. Approximation Capabilities
- (a)
- The input subset ;
- (b)
- The HP subregion (within the input subset), i.e., ;
- (c)
- The SAT region (within the input subset), i.e., .
3.5.2. Extrapolation Capabilities
- (d)
- The full measured dataset up to saturation ;
- (e)
- The subregion which contained the measured data ;
- (f)
- The EXT subregion ().
4. Results
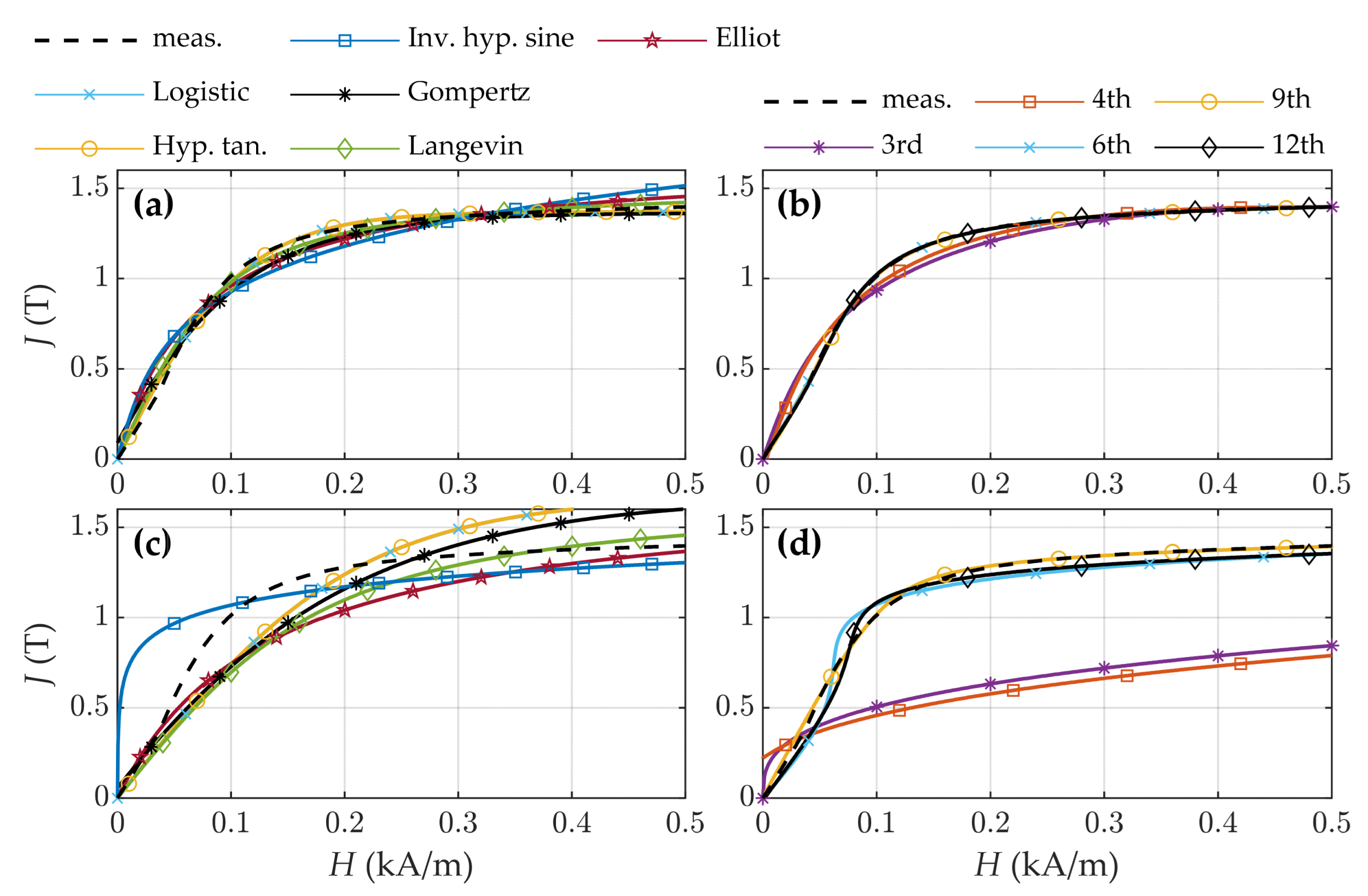
4.1. Approximation with Analytic Functions
4.1.1. Anhysteretic Curves
4.1.2. Major Loop Curves
4.1.3. First Magnetization Curves
4.2. Approximation with Higher-Order Bézier Curves
4.2.1. Anhysteretic Curves
4.2.2. Major Loop Curves
4.2.3. First Magnetization Curves
4.3. Analysis of Extrapolation Capabilities
4.3.1. Anhysteretic Curves
4.3.2. Major Loop Curves
4.3.3. First Magnetization Curves
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tellinen, J. A simple scalar model for magnetic hysteresis. IEEE Trans. Magn. 1998, 34, 2200–2206. [Google Scholar] [CrossRef]
- Zirka, S.E.; Moroz, Y.I.; Harrison, R.G.; Chiesa, N. Inverse Hysteresis Models for Transient Simulation. IEEE Trans. Power Deliv. 2014, 29, 552–559. [Google Scholar] [CrossRef]
- Vo, A.-T.; Fassenet, M.; Préault, V.; Espanet, C.; Kedous-Lebouc, A. New formulation of Loss-Surface Model for accurate iron loss modeling at extreme flux density and flux variation: Experimental analysis and test on a high-speed PMSM. J. Magn. Magn. Mater. 2022, 563, 169935. [Google Scholar] [CrossRef]
- Kokornaczyk, E.; Gutowski, M.W. Anhysteretic Functions for the Jiles–Atherton Model. IEEE Trans. Magn. 2015, 51, 1–5. [Google Scholar] [CrossRef]
- Yang, J.; Shi, M.; Zhang, X.; Ma, Y.; Liu, Y.; Yuan, S.; Han, B. Demagnetization Parameters Evaluation of Magnetic Shields Based on Anhysteretic Magnetization Curve. Materials 2023, 16, 5238. [Google Scholar] [CrossRef] [PubMed]
- Mörée, G.; Leijon, M. Review of Hysteresis Models for Magnetic Materials. Energies 2023, 16, 3908. [Google Scholar] [CrossRef]
- Steentjes, S.; Hameyer, K.; Dolinar, D.; Petrun, M. Iron-Loss and Magnetic Hysteresis Under Arbitrary Waveforms in NO Electrical Steel: A Comparative Study of Hysteresis Models. IEEE Trans. Ind. Electron. 2017, 64, 2511–2521. [Google Scholar] [CrossRef]
- Bertotti, G. Hysteresis in Magnetism: For Physicists, Materials Scientists, and Engineers; Academic Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Takács, J. A phenomenological mathematical model of hysteresis. Compel 2001, 20, 1002–1014. [Google Scholar] [CrossRef]
- Jesenik, M.; Mernik, M.; Trlep, M. Determination of a Hysteresis Model Parameters with the Use of Different Evolutionary Methods for an Innovative Hysteresis Model. Mathematics 2020, 8, 201. [Google Scholar] [CrossRef]
- Hofmann, M.J.; Herzog, H.-G. Modeling Magnetic Power Losses in Electrical Steel Sheets in Respect of Arbitrary Alternating Induction Waveforms: Theoretical Considerations and Model Synthesis. IEEE Trans. Magn. 2015, 51, 1–11. [Google Scholar] [CrossRef]
- Bastos, J.P.A.; Hoffmann, K.; Leite, J.V.; Sadowski, N. A New and Robust Hysteresis Modeling Based on Simple Equations. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef]
- Messal, O.; Vo, A.T.; Fassenet, M.; Mas, P.; Buffat, S.; Kedous-Lebouc, A. Advanced approach for static part of loss-surface iron loss model. J. Magn. Magn. Mater. 2020, 502, 166401. [Google Scholar] [CrossRef]
- Szczyglowski, J. Use of quasi-static loops of magnetic hysteresis in loss prediction in non-oriented electrical steels. Physica B 2020, 580, 411812. [Google Scholar] [CrossRef]
- Petrescu, L.; Cazacu, E.; Petrescu, C. Sigmoid functions used in hysteresis phenomenon modeling. In Proceedings of the 2015 9th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 7–9 May 2015. [Google Scholar] [CrossRef]
- Li, Q.; Li, J.-P.; Chen, L. A Bezier Curve-Based Font Generation Algorithm for Character Fonts. In Proceedings of the 2018 IEEE 20th International Conference on High Performance Computing and Communications; IEEE 16th International Conference on Smart City; IEEE 4th International Conference on Data Science and Systems (HPCC/SmartCity/DSS), Exeter, UK, 28–30 June 2018. [Google Scholar] [CrossRef]
- Amat, N.F.I.C.; Yahya, Z.R.; Rusdi, N.A.; Helmee, N.A.; Muhamadd, W.Z.A.W. Arabic Fonts Representation in Cubic Bézier Curve using Different Soft Computing Algorithm. IOP Conf. Ser. Mater. Sci. Eng. 2019, 705, 012026. [Google Scholar] [CrossRef]
- Vinayak, A.; Zakaria, M.A.; Baarath, K.; Majeed, A.P.P.A. A novel Bezier curve control point search algorithm for autonomous navigation using N-order polynomial search with boundary conditions. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021. [Google Scholar] [CrossRef]
- Choi, J.-W.; Curry, R.; Elkaim, G. Path Planning Based on Bezier Curve for Autonomous Ground Vehicles. In Proceedings of the Advances in Electrical and Electronics Engineering—IAENG Special Edition of the World Congress on Engineering and Computer Science 2008, San Francisco, CA, USA, 22–24 October 2008. [Google Scholar] [CrossRef]
- Han, L.; Yashiro, H.; Tehrani Nik Nejad, H.; Do, Q.H.; Mita, S. Bezier curve based path planning for autonomous vehicle in urban environment. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010. [Google Scholar] [CrossRef]
- Satai, H.A.; Zahra, M.M.A.; Rasool, Z.I.; Abd-Ali, R.S.; Pruncu, C.I. Bézier Curves-Based Optimal Trajectory Design for Multirotor UAVs with Any-Angle Pathfinding Algorithms. Sensors 2021, 21, 2460. [Google Scholar] [CrossRef]
- Coskun, O.; Turkmen, H.S. Multi-objective optimization of variable stiffness laminated plates modeled using Bezier curves. Compos. Struct. 2022, 279, 114814. [Google Scholar] [CrossRef]
- Nuntawisuttiwong, T.; Dejdumrong, N. An Approximation of Bézier Curves by a Sequence of Circular Arcs. Inf. Technol. Control 2021, 50, 213–223. [Google Scholar] [CrossRef]
- Tiismus, H.; Kallaste, A.; Vaimann, T.; Lind, L.; Virro, I.; Rassõlkin, A.; Dedova, T. Laser Additively Manufactured Magnetic Core Design and Process for Electrical Machine Applications. Energies 2022, 15, 3665. [Google Scholar] [CrossRef]
- Hussain, S.; Kallaste, A.; Vaimann, T. Recent Trends in Additive Manufacturing and Topology Optimization of Reluctance Machines. Energies 2023, 16, 3840. [Google Scholar] [CrossRef]
- Matwankar, C.S.; Pramanick, S.; Singh, B. Flux-linkage Characterization and Rotor Position Estimation of Switched Reluctance Motor using Bézier Curves. In Proceedings of the 2021 IEEE 2nd International Conference on Smart Technologies for Power, Energy and Control (STPEC), Bilaspur, India, 19–22 December 2021. [Google Scholar] [CrossRef]
- Louzazni, M.; Al-Dahidi, S. Approximation of photovoltaic characteristics curves using Bezier Curve. Renew. Energy 2021, 174, 715–732. [Google Scholar] [CrossRef]
- Shi, N.; Lv, Y.L.; Zhang, Y.C.; Zhu, X.H. Linear fitting Rule of I-V characteristics of thin-film cells based on Bezier function. Energy 2023, 278, 127997. [Google Scholar] [CrossRef]
- Cui, X.; Li, Y.; Xu, L. Adaptive Extension Fitting Scheme: An Effective Curve Approximation Method Using Piecewise Bézier Technology. IEEE Access 2023, 11, 58422–58435. [Google Scholar] [CrossRef]
- Said Mad Zain, S.A.A.A.; Misro, M.Y.; Miura, K.T. Generalized Fractional Bézier Curve with Shape Parameters. Mathematics 2021, 9, 2141. [Google Scholar] [CrossRef]
- Rahmanović, E.; Petrun, M. Approximation of nonlinear properties of soft-magnetic materials with Bézier curves. In Proceedings of the 2023 IEEE International Magnetic Conference—Short Papers (INTERMAG Short Papers), Sendai, Japan, 15–19 May 2023. [Google Scholar] [CrossRef]
- Steentjes, S.; Petrun, M.; Glehn, G.; Dolinar, D.; Hameyer, K. Suitability of the double Langevin function for description of anhysteretic magnetization curves in NO and GO electrical steel grades. AIP Adv. 2017, 7, 056013. [Google Scholar] [CrossRef]
- Skarlatos, A.; Theodoulidis, T. A Modal Approach for the Solution of the Non-Linear Induction Problem in Ferromagnetic Media. IEEE Trans. Magn. 2016, 52, 1–11. [Google Scholar] [CrossRef]
- Baydas, S.; Karakas, B. Defining a curve as a Bezier curve. J. Taibah Univ. Sci. 2019, 13, 522–528. [Google Scholar] [CrossRef]
- Ezhov, N.; Neitzel, F.; Petrovic, S. Spline Approximation, Part 2: From Polynomials in the Monomial Basis to B-splines—A Derivation. Mathematics 2021, 9, 2198. [Google Scholar] [CrossRef]
- Kiliçoglu, Ş.; Şenyurt, S. On the matrix representation of 5th order Bézier Curve and derivatives in E^3. Commun. Fac. Sci. Univ. Ank. Ser. A1 Math. Stat. 2022, 71, 133–152. [Google Scholar] [CrossRef]
- Kilicoglu, S.; Yurttancikmaz, S. How to approximate cosine curve with 4th and 6th order Bezier curve in plane? Therm. Sci. 2022, 26, 559–570. [Google Scholar] [CrossRef]
- Rovenski, V. Piecewise Curves and Surfaces. In Modeling of Curves and Surfaces with MATLAB®; Springer: New York, NY, USA, 2010; pp. 357–411. [Google Scholar]
- Pijls, H.; Quan, L.P. A Computational Method with Maple for Finding the Maximum Curvature of a Bézier-Spline Curve. Math. Comput. Appl. 2023, 28, 56. [Google Scholar] [CrossRef]
- Sanchez-Reyes, J. Detecting symmetries in polynomial Bezier curves. J Comput Appl Math 2015, 288, 274–283. [Google Scholar] [CrossRef]
- Pandunata, P.; Shamsuddin, S.M.H. Differential Evolution Optimization for Bezier Curve Fitting. In Proceedings of the 2010 Seventh International Conference on Computer Graphics, Imaging and Visualization, Sydney, Australia, 7–10 August 2010. [Google Scholar] [CrossRef]
- Ezhov, N.; Neitzel, F.; Petrovic, S. Spline approximation, Part 1: Basic methodology. J. Appl. Geod. 2018, 12, 139–155. [Google Scholar] [CrossRef]
- Wang, L.; Ding, F.; Yang, D.; Wang, K.; Jiao, B.; Chen, Q. A fitting-extrapolation method of B-H curve for magnetic saturation applications. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2023, 42, 494–505. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Analytic Function | Equation | |
|---|---|---|
| Logistic | (1) | |
| Hyperbolic tangent | (2) | |
| Elliot | (3) | |
| Gompertz | (4) | |
| Langevin | (5) | |
| Inverse hyperbolic sine | (6) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahmanović, E.; Petrun, M. Analysis of Higher-Order Bézier Curves for Approximation of the Static Magnetic Properties of NO Electrical Steels. Mathematics 2024, 12, 445. https://doi.org/10.3390/math12030445
Rahmanović E, Petrun M. Analysis of Higher-Order Bézier Curves for Approximation of the Static Magnetic Properties of NO Electrical Steels. Mathematics. 2024; 12(3):445. https://doi.org/10.3390/math12030445
Chicago/Turabian StyleRahmanović, Ermin, and Martin Petrun. 2024. "Analysis of Higher-Order Bézier Curves for Approximation of the Static Magnetic Properties of NO Electrical Steels" Mathematics 12, no. 3: 445. https://doi.org/10.3390/math12030445