
Three-Dimensional Lidar Localization and Mapping with Loop-Closure Detection Based on Dense Depth Information

Abstract
:1. Introduction
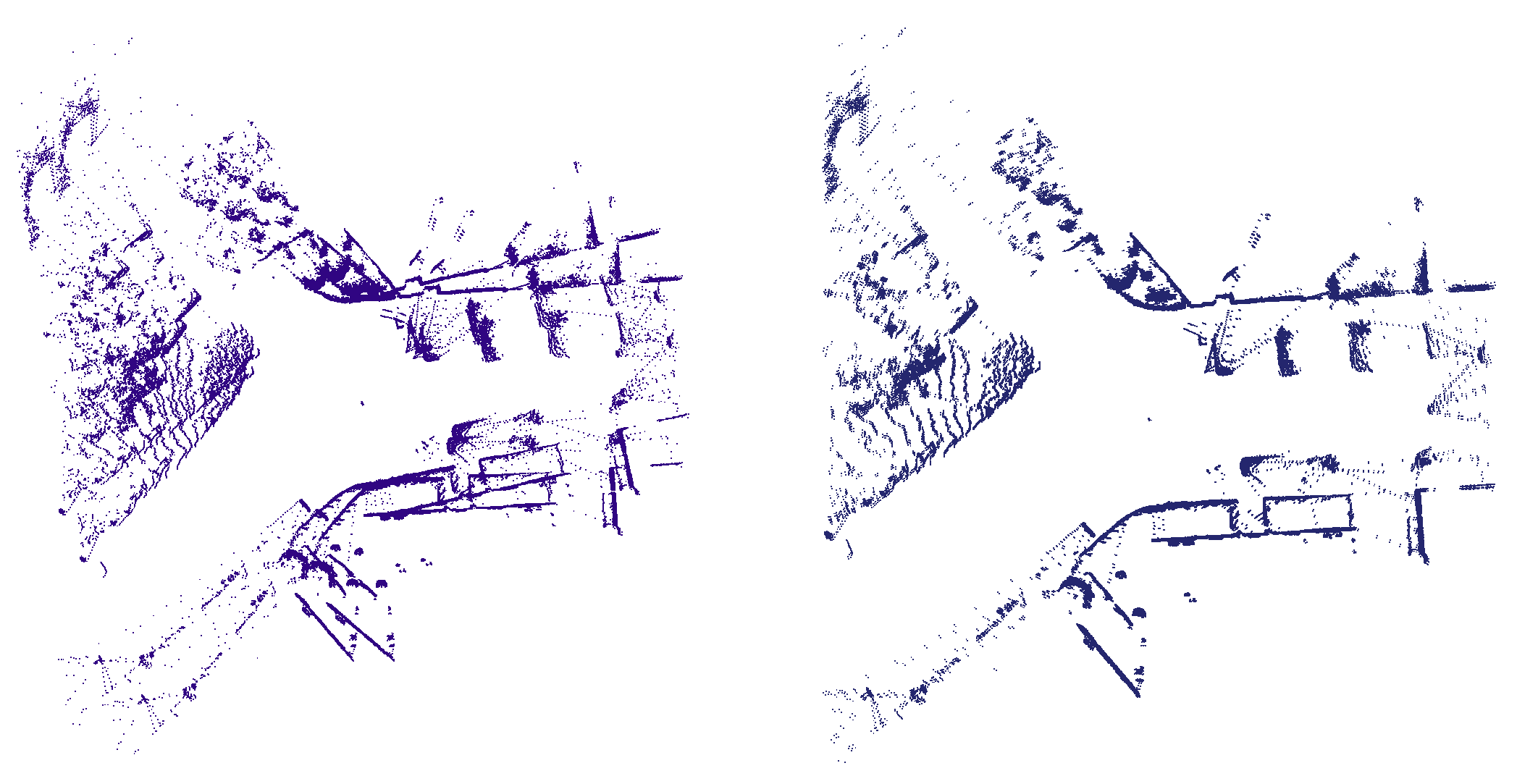
- In comparison with the previous scan-matching algorithm in [12], our newly proposed one additionally contains a ground-point removal and an effective point cloud data segmentation algorithm. To overcome the slow convergence speed arising from the inaccurate environment model, the point cloud registration problem has been successfully transformed into an optimization problem. Subsequently, a point cloud segmentation algorithm is newly designed to divide the point cloud space into different cells, which exhibits an excellent performance.
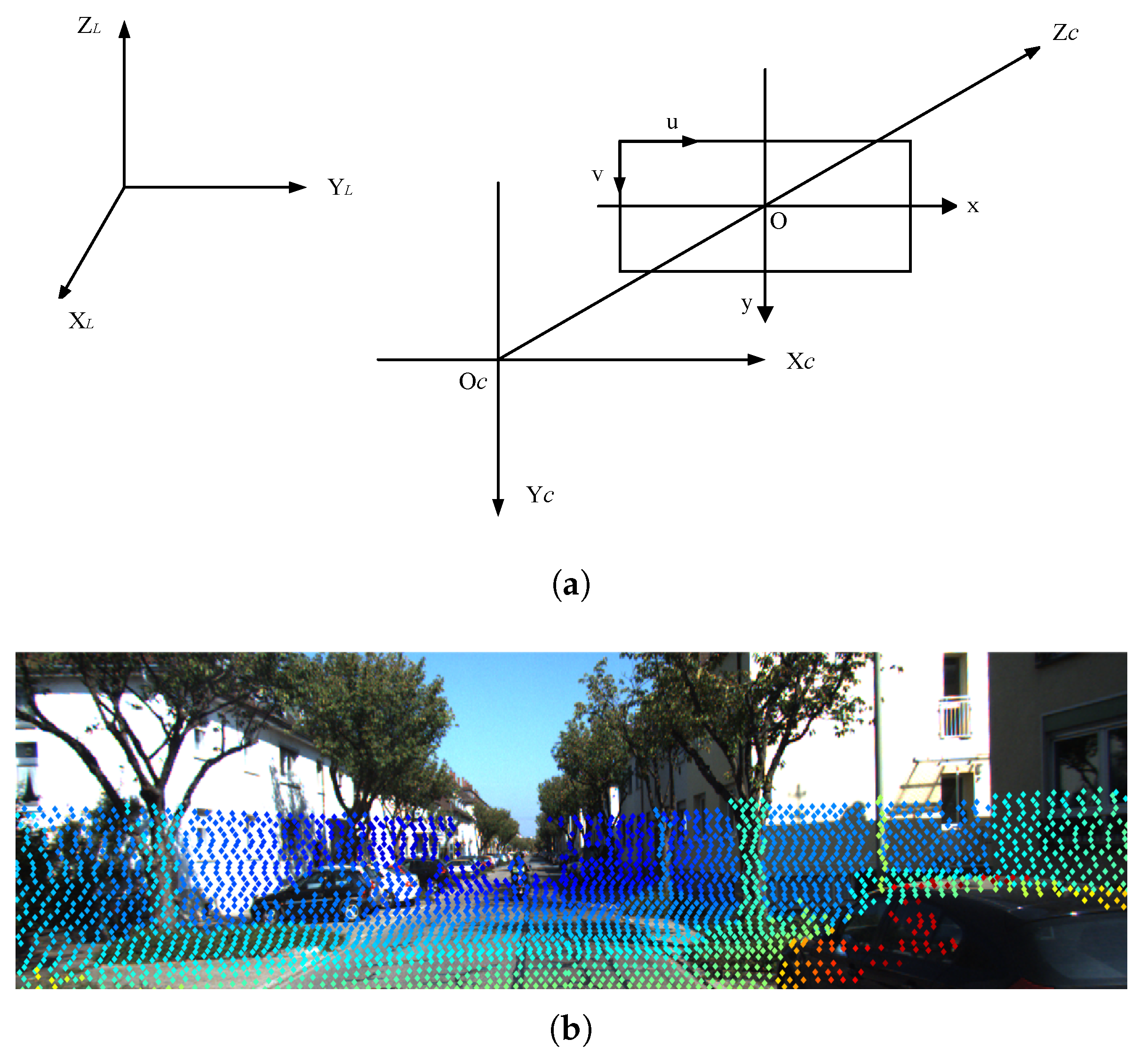
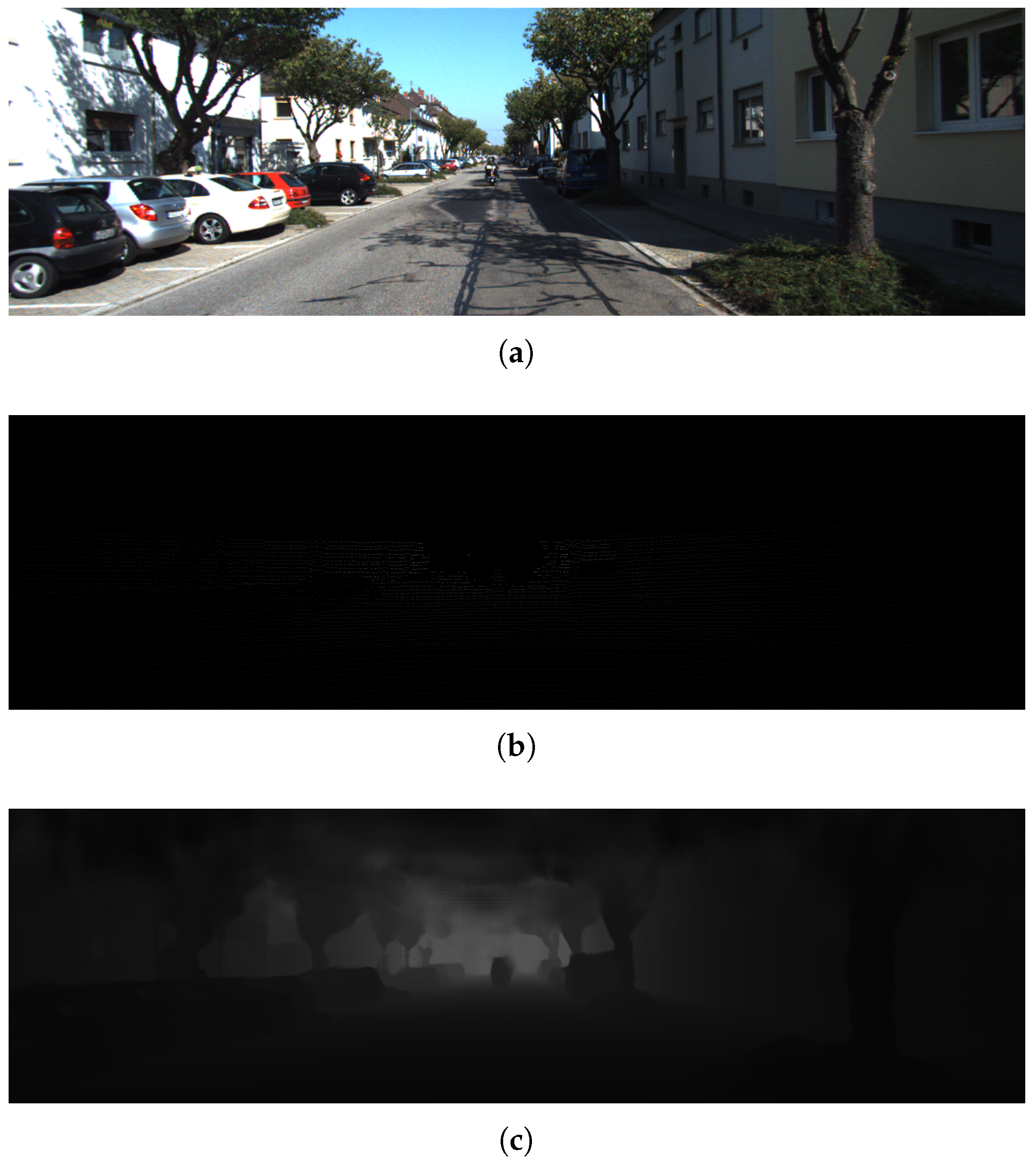
- By fusing lidar data with camera data, our newly proposed loop-closure detection scheme successfully avoids the common problem found in [8] that loop-closure detection is prone to fail in structured scenes. In comparison with common vision schemes, our proposed scheme can effectively reduce the influence of the illumination on the loop-closure detection with the aid of a depth-completion algorithm, and thus our scheme is more robust in various scenarios.
2. Related Work
3. Proposed Method
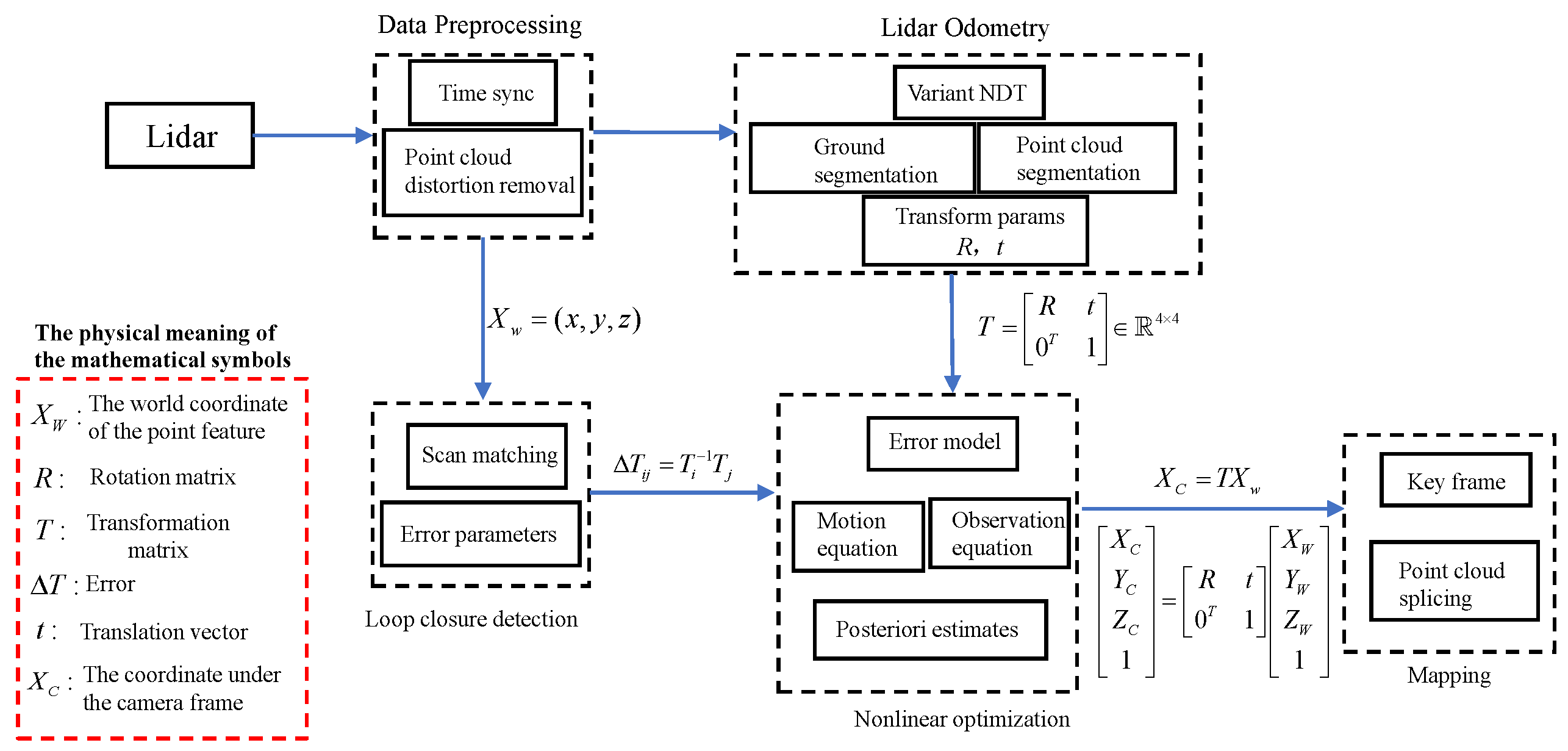
3.1. System Overview
3.2. Lidar Odometry
3.3. Loop Closure Detection
3.4. Optimization
4. Experiments
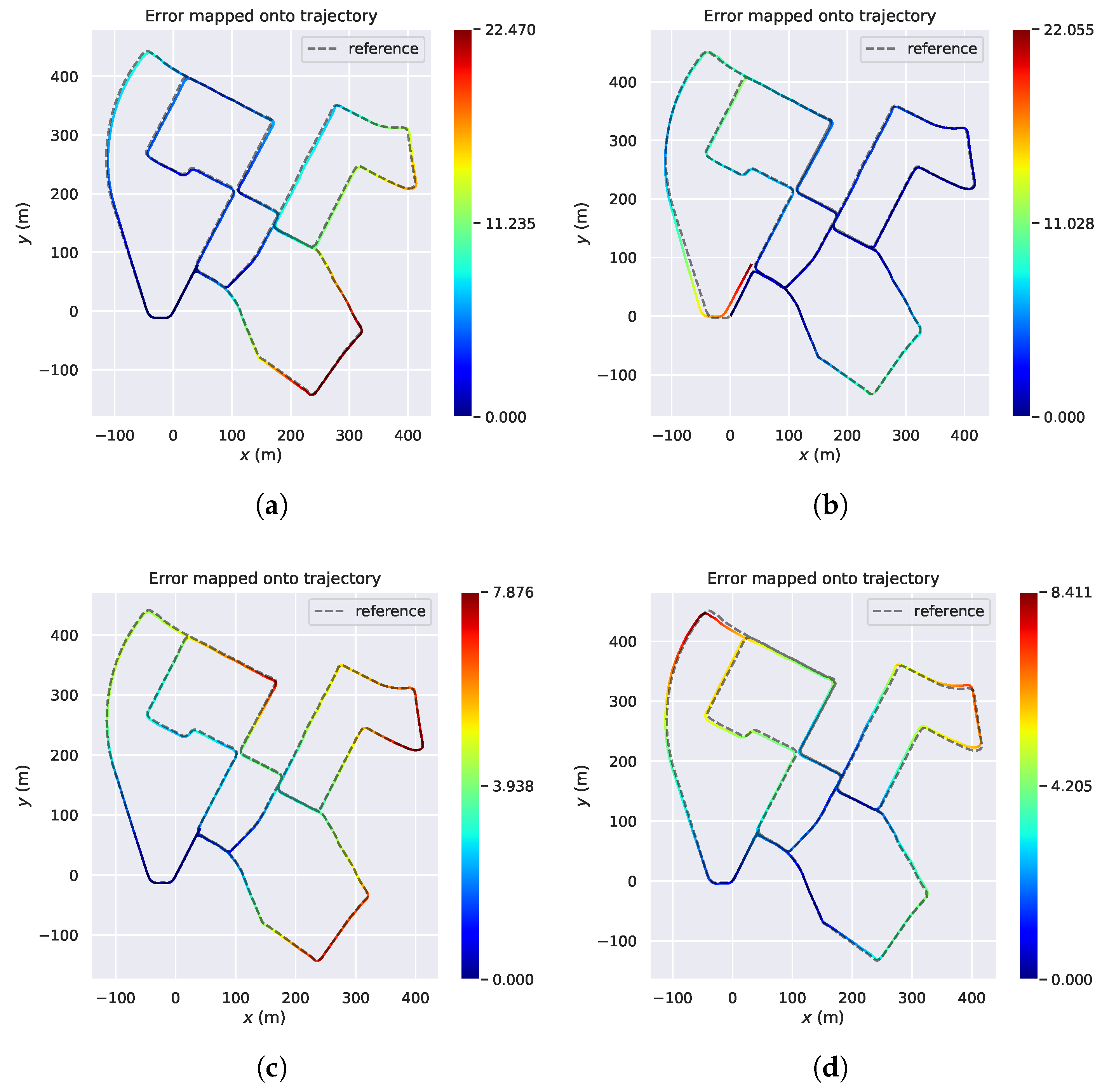
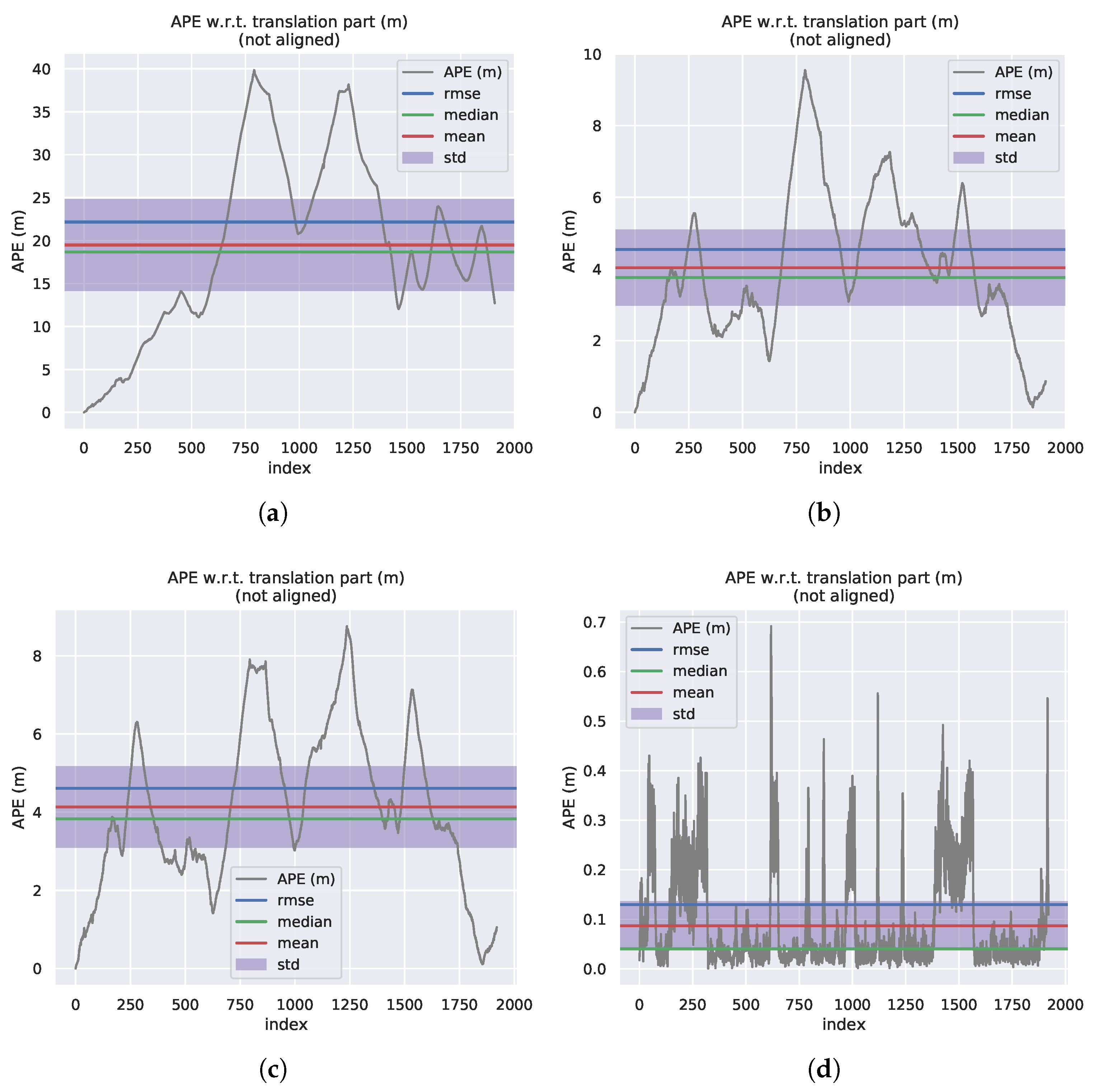
4.1. Accuracy in KITTI Dataset
4.2. Accuracy in M2DGR Dataset
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Akashi, H.; Kumamoto, H. Random sampling approach to state estimation in switching environments. Automatica 1977, 13, 429–434. [Google Scholar] [CrossRef]
- Murphy, K.; Russell, S. Rao-Blackwellised Particle Filtering for Dynamic Bayesian Networks; Springer: Berlin/Heidelberg, Germany, 2001; pp. 499–515. [Google Scholar]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved techniques for grid mapping with rao-blackwellized particle filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef]
- Eliazar, A.; Parr, R. Dp-slam: Fast, robust simultaneous localization and mapping without predetermined landmarks. In Proceedings of the IJCAI, Acapulco, Mexico, 9–15 August 2003; pp. 1135–1142. [Google Scholar]
- Choi, K.-S.; Lee, S.-G. Enhanced slam for a mobile robot using extended kalman filter and neural networks. Int. J. Precis. Eng. Manuf. 2010, 11, 255–264. [Google Scholar] [CrossRef]
- Huang, G.P.; Mourikis, A.I.; Roumeliotis, S.I. A quadratic-complexity observability-constrained unscented kalman filter for slam. IEEE Trans. Robot. 2013, 29, 1226–1243. [Google Scholar] [CrossRef]
- Zhou, H.; Ni, K.; Zhou, Q.; Zhang, T. An SFM algorithm with good convergence that addresses outliers for realizing mono-SLAM. IEEE Trans. Ind. Inform. 2016, 12, 515–523. [Google Scholar] [CrossRef]
- Kohlbrecher, S.; Von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable slam system with full 3d motion estimation. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar]
- Konolige, K.; Grisetti, G.; Kümmerle, R.; Burgard, W.; Limketkai, B.; Vincent, R. Efficient sparse pose adjustment for 2d mapping. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 22–29. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2d lidar slam. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Besl, P.J.; McKay, N.D. Method for registration of 3-d shapes. Sensor fusion IV: Control paradigms and data structures. Int. Soc. Opt. Photonics 1992, 1611, 586–606. [Google Scholar]
- Magnusson, M. The Three-Dimensional Normal-Distributions Transform: An Efficient Representation for Registration, Surface Analysis, and Loop Detection. Ph.D. Thesis, Örebro Universitet, Örebro, Sweden, 2009. [Google Scholar]
- Zhang, J.; Singh, S. Loam: Lidar odometry and mapping in real-time. Robot. Sci. Syst. 2014, 2, 1–9. [Google Scholar]
- Shan, T.; Englot, B. Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Gao, H.; Zhang, X.; Wen, J.; Yuan, J.; Fang, Y. Autonomous indoor exploration via polygon map construction and graph-based slam using directional endpoint features. IEEE Trans. Autom. Sci. Eng. 2018, 16, 1531–1542. [Google Scholar] [CrossRef]
- Jung, S.; Choi, D.; Song, S.; Myung, H. Bridge inspection using unmanned aerial vehicle based on hg-slam: Hierarchical graph-based slam. Remote Sens. 2020, 12, 3022. [Google Scholar] [CrossRef]
- Lin, J.; Zheng, C.; Xu, W.; Zhang, F. R2live: A robust, real-time, lidar-inertial-visual tightly-coupled state estimator and mapping. IEEE Robot. Autom. Lett. 2021, 6, 7469–7476. [Google Scholar] [CrossRef]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-icp. Robot. Sci. Syst. 2009, 2, 435. [Google Scholar]
- Serafin, J.; Grisetti, G. Nicp: Dense normal based point cloud registration. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 742–749. [Google Scholar]
- Hong, H.; Lee, B. Dynamic scaling factors of covariances for accurate 3d normal distributions transform registration. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1190–1196. [Google Scholar]
- Zaganidis, A.; Magnusson, M.; Duckett, T.; Cielniak, G. Semantic-assisted 3d normal distributions transform for scan registration in environments with limited structure. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4064–4069. [Google Scholar]
- Schulz, C.; Zell, A. Real-time graph-based slam with occupancy normal distributions transforms. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3106–3111. [Google Scholar]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the icp algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar]
- Kim, G.; Kim, A. Scan context: Egocentric spatial descriptor for place recognition within 3d point cloud map. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4802–4809. [Google Scholar]
- Wang, H.; Wang, C.; Xie, L. Intensity scan context: Coding intensity and geometry relations for loop closure detection. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 2095–2101. [Google Scholar]
- Wang, Y.; Sun, Z.; Xu, C.Z.; Sarma, S.E.; Yang, J.; Kong, H. Lidar iris for loop-closure detection. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 5769–5775. [Google Scholar]
- Gálvez-López, D.; Tardos, J.D. Bags of binary words for fast place recognition in image sequences. IEEE Trans. Robot. 2012, 28, 1188–1197. [Google Scholar] [CrossRef]
- Suger, B.; Tipaldi, G.D.; Spinello, L.; Burgard, W. An approach to solving large-scale slam problems with a small memory footprint. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3632–3637. [Google Scholar]
- Chen, P.; Peng, Y.; Wang, S. The Hessian matrix of Lagrange function. Linear Algebra Its Appl. 2017, 531, 537–546. [Google Scholar] [CrossRef]
- Hu, M.; Wang, S.; Li, B.; Ning, S.; Fan, L.; Gong, X. Penet: Towards precise and efficient image guided depth completion. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 13656–13662. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? The kitti vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar]
- Yin, J.; Li, A.; Li, T.; Yu, W.; Zou, D. M2dgr: A multi-sensor and multi-scenario slam dataset for ground robots. IEEE Robot. Autom. Lett. 2021, 7, 2266–2273. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A-LOAM | CT-ICP | HDL SLAM | Ours | |
|---|---|---|---|---|
| APE(m) | 12.171403 | 4.542528 | 4.612094 | 2.029666 |
| RPE(%) | 2.512680 | 2.319101 | 1.819429 | 1.786136 |
| A-LOAM | CT-ICP | HDL SLAM | Ours | |
|---|---|---|---|---|
| APE(m) | 8.382180 | 4.044064 | 3.447970 | 1.725925 |
| RPE(%) | 3.069632 | 2.855111 | 2.725925 | 1.469667 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Yu, Z.; Deng, C.; Lai, G. Three-Dimensional Lidar Localization and Mapping with Loop-Closure Detection Based on Dense Depth Information. Mathematics 2023, 11, 2211. https://doi.org/10.3390/math11092211
Yang L, Yu Z, Deng C, Lai G. Three-Dimensional Lidar Localization and Mapping with Loop-Closure Detection Based on Dense Depth Information. Mathematics. 2023; 11(9):2211. https://doi.org/10.3390/math11092211
Chicago/Turabian StyleYang, Liang, Zhenbiao Yu, Chunjian Deng, and Guanyu Lai. 2023. "Three-Dimensional Lidar Localization and Mapping with Loop-Closure Detection Based on Dense Depth Information" Mathematics 11, no. 9: 2211. https://doi.org/10.3390/math11092211