

Space Splitting and Merging Technique for Online 3-D Bin Packing

Abstract
:1. Introduction
2. Online 3-D Bin Packing Algorithm
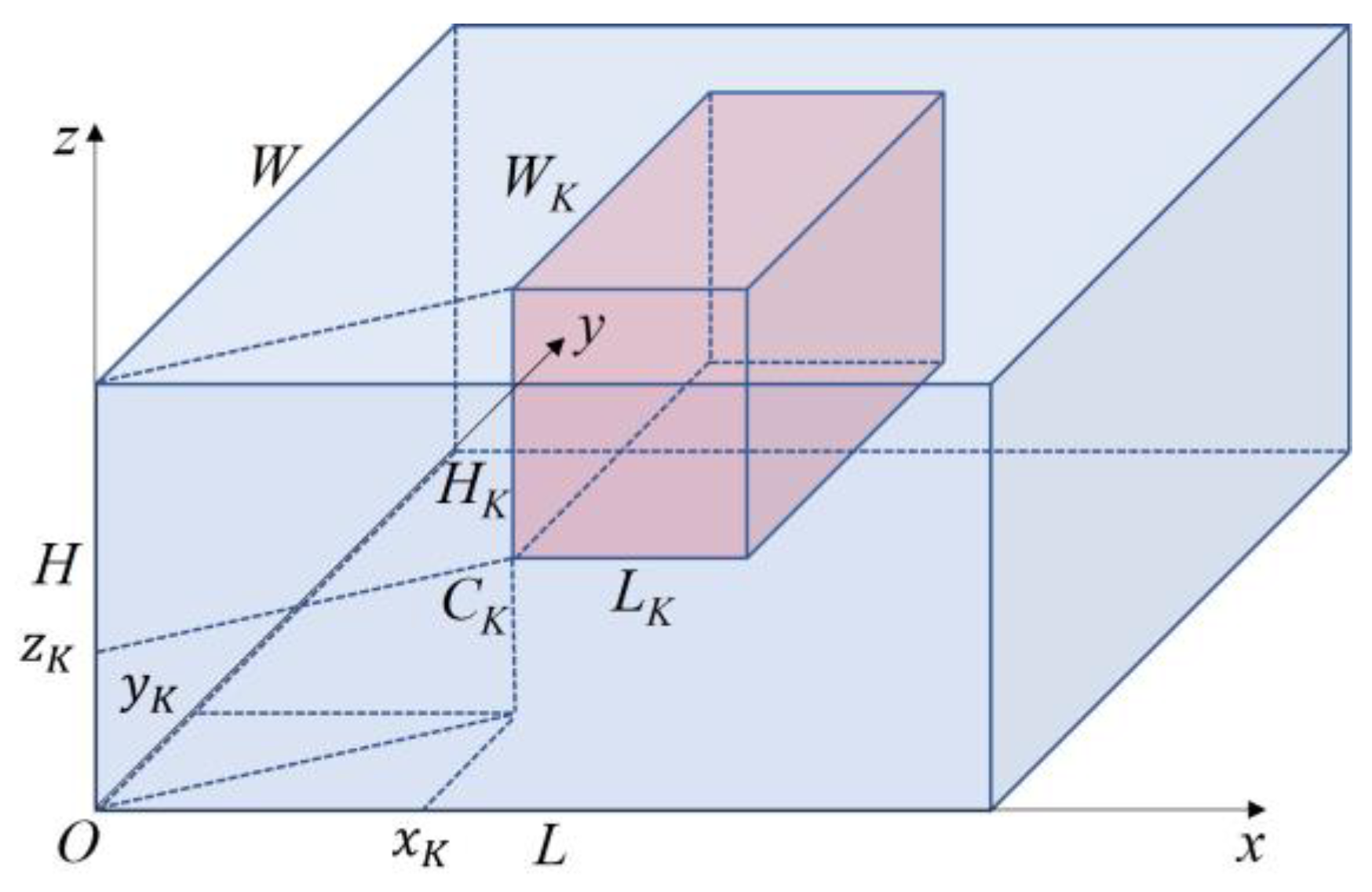
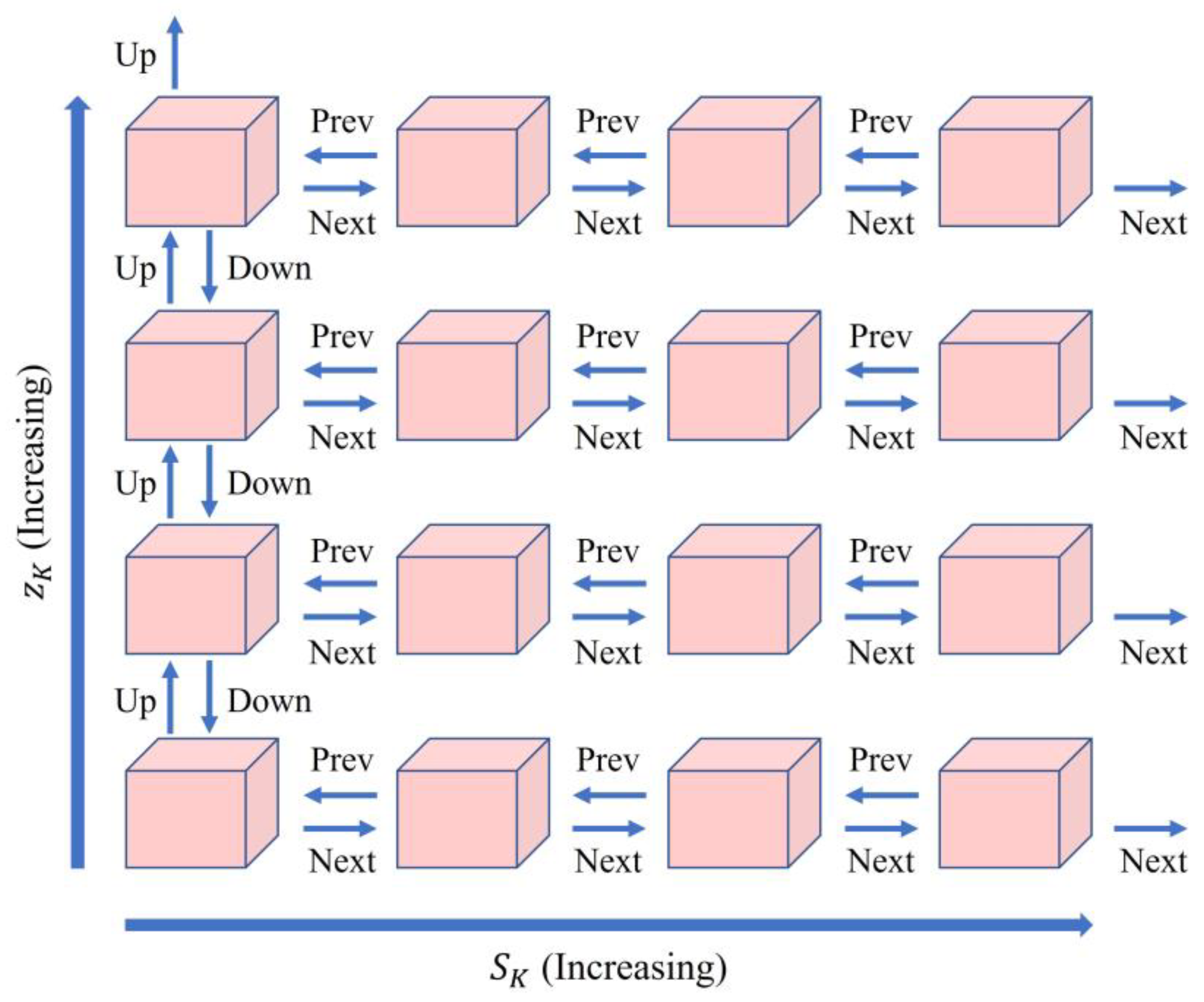
2.1. Main Data Structure
2.2. Secondary Data Structure
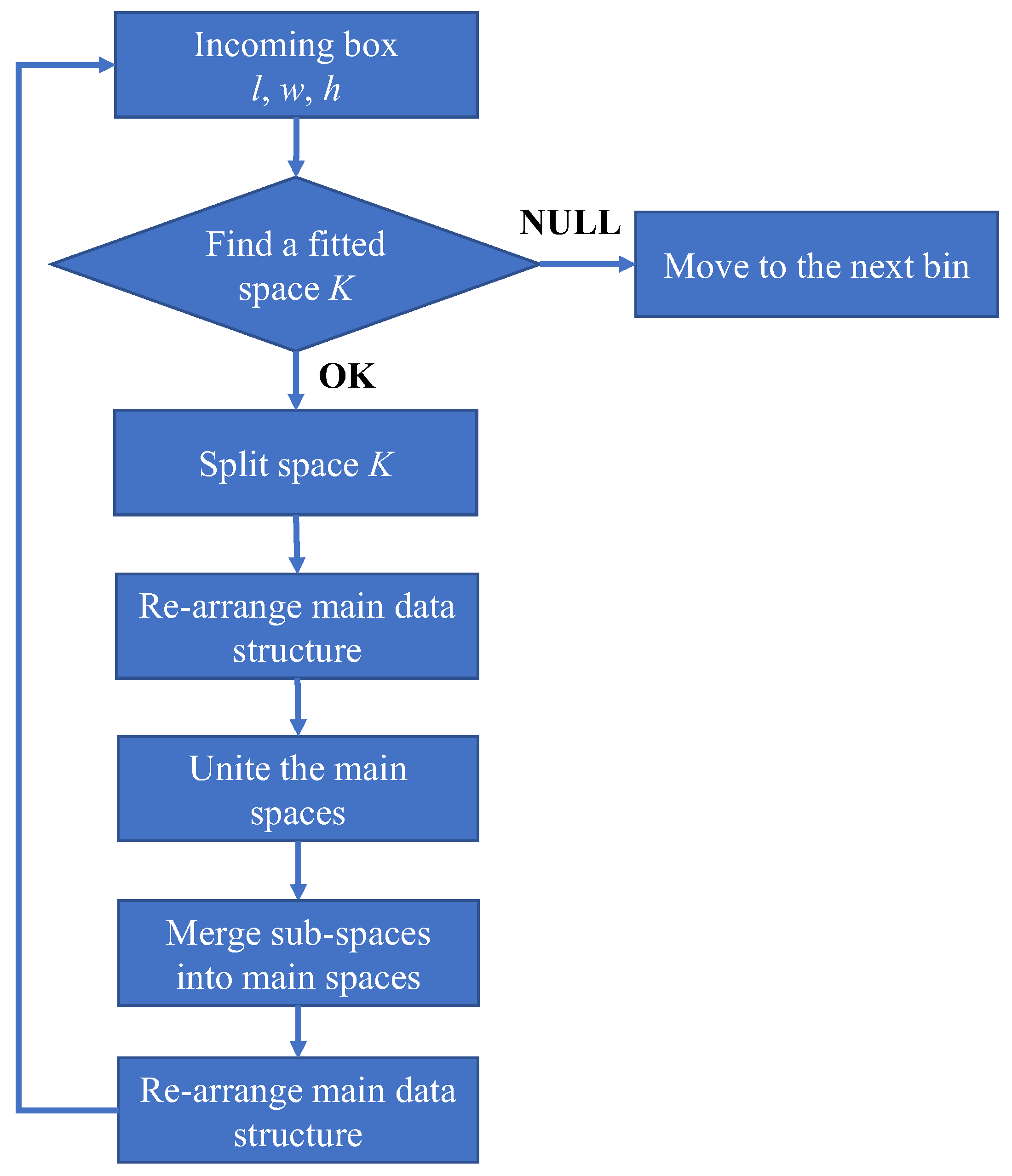
2.3. Algorithm
| Algorithm 1: The 3-D online bin packing algorithm. |
| Input: incoming box l, w, h Output: the position of the box in the bin |
| 1: function PlaceBox(l, w, h) |
| 2: sp = FindSpace(l, w, h) //To find the fitted space in the main data structure |
| 3: if sp == NULL then |
| 4: sp = FindConsecutiveSpaces(); //To find the fitted space by merging the consecutive main spaces |
| 5: if sp == NULL then |
| 6: return false |
| 7: end if |
| 8: end if |
| 9: obtain the position of the box in the bin x, y, z, l, w, h |
| 10: SplitSpace(sp); //To split the space sp |
| 11: ArrangeSpaces(); //To arrange main data structure |
| 12: UniteSpaces(); //To unite the main spaces |
| 13: OptimizeSpaces(); //To merge subspaces into main spaces |
| 14: ArrangeSpaces(); //To arrange main data structure |
| 15: return true |
| 16: end function |
2.3.1. Finding a Fitted Space K
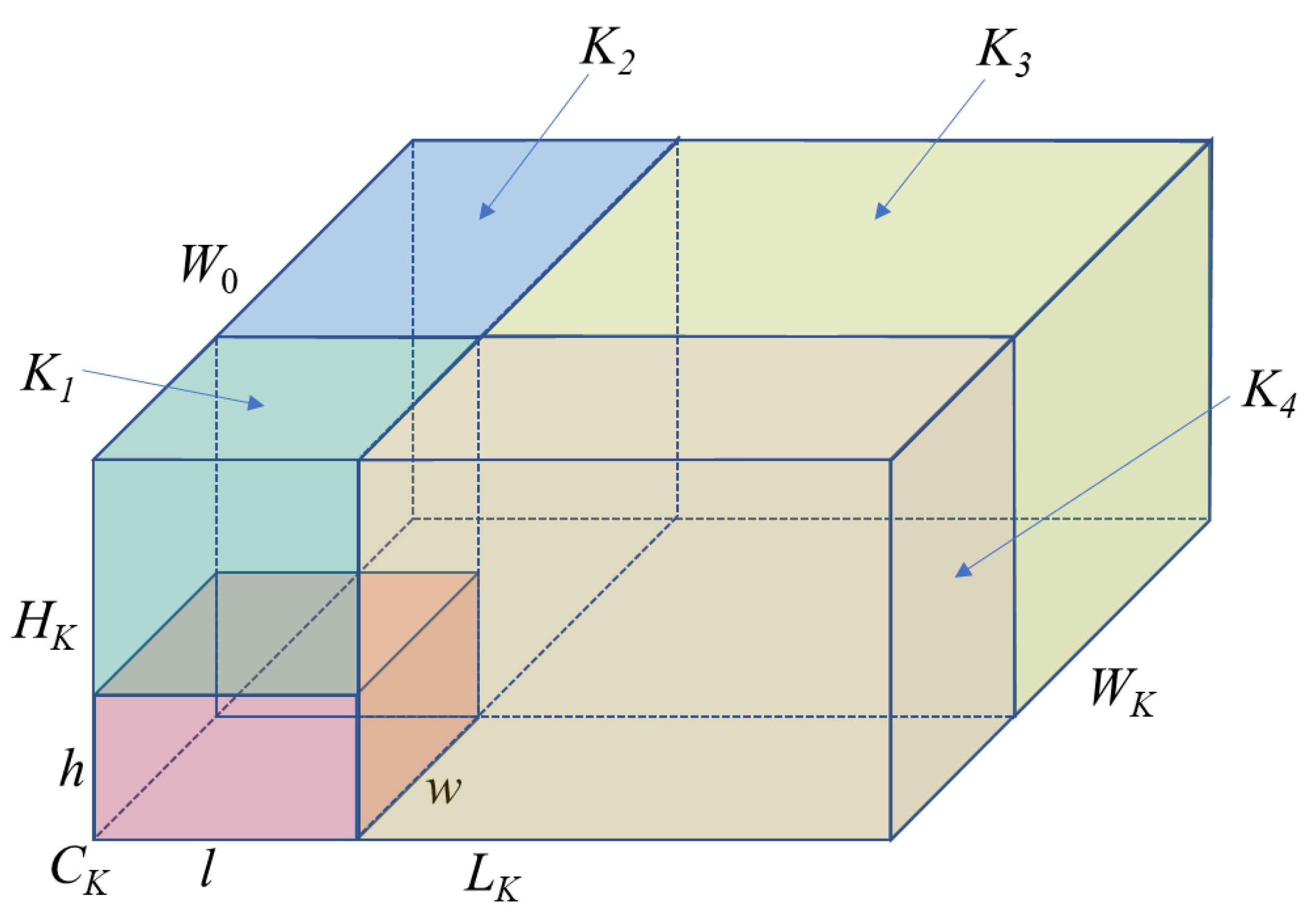
2.3.2. Splitting the Space K
2.3.3. Rearranging the Main Data Structure
2.3.4. Merging the Main Spaces
2.3.5. Merging the Secondary Spaces into Main Spaces
3. Experimental Results and Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- De Castro Silva, J.L.; Soma, N.Y.; Maculan, N. A greedy search for the three-dimensional bin packing problem: The packing static stability case. Int. Trans. Oper. Res. 2003, 10, 141–153. [Google Scholar] [CrossRef]
- Johnson, D.S.; Demers, A.; Ullman, J.D.; Garey, M.R.; Graham, R.L. Worst-case performance bounds for simple one-dimensional packing algorithms. SIAM J. Comput. 1974, 3, 299–325. [Google Scholar] [CrossRef]
- Martello, S.; Toth, P. Lower bounds and reduction procedures for the bin packing problem. Discret. Appl. Math. 1990, 28, 59–70. [Google Scholar] [CrossRef]
- Delorme, M.; Iori, M.; Martello, S. Bin packing and cutting stock problems: Mathematical models and exact algorithms. Eur. J. Oper. Res. 2016, 255, 1–20. [Google Scholar] [CrossRef]
- Martello, S.; Vigo, D. Exact solution of the two-dimensional finite bin packing problem. Manag. Sci. 1998, 44, 388–399. [Google Scholar] [CrossRef]
- Lodi, A.; Martello, S.; Monaci, M. Two-dimensional packing problems: A survey. Eur. J. Oper. Res. 2002, 141, 241–252. [Google Scholar] [CrossRef]
- Zhang, D.; Kang, Y.; Deng, A. A new heuristic recursive algorithm for the strip rectangular packing problem. Comput. Oper. Res. 2006, 33, 2209–2217. [Google Scholar] [CrossRef]
- Cid-Garcia, N.M.; Rios-Solis, Y.A. Positions and covering: A two-stage methodology to obtain optimal solutions for the 2d-bin packing problem. PLoS ONE 2020, 15, e0229358. [Google Scholar] [CrossRef]
- Martello, S.; Pisinger, D.; Vigo, D. The three-dimensional bin packing problem. Oper. Res. 2000, 48, 256–267. [Google Scholar] [CrossRef]
- Baltacioglu, E. The Distributer’s Three-Dimensional Pallet-Packing Problem: A Human Intelligence Based Heuristic Approach. Ph.D. Thesis, Air Force Institute of Technology, Dayton, OH, USA, 2001. [Google Scholar]
- Maarouf, W.F.; Barbar, A.M.; Owayjan, M.J. A new heuristic algorithm for the 3D bin packing problem. In Innovations and Advanced Techniques in Systems, Computing Sciences and Software Engineering; Elleithy, K., Ed.; Springer: Dordrecht, The Netherlands, 2008; pp. 342–345. [Google Scholar]
- Liu, Y.; Vo, T.V. Bin packing solution for automated packaging application. Appl. Mech. Mater. 2012, 143–144, 279–283. [Google Scholar] [CrossRef]
- Wu, Y.; Li, W.; Goh, M.; de Souza, R. Three-dimensional bin packing problem with variable bin height. Eur. J. Oper. Res. 2010, 202, 347–355. [Google Scholar] [CrossRef]
- Feng, X.; Moon, I.; Shin, J. Hybrid genetic algorithms for the three-dimensional multiple container packing problem. Flex. Serv. Manuf. J. 2015, 27, 451–477. [Google Scholar] [CrossRef]
- Linkosaari, T.; Urponen, T.; Juvonen, H.; Mäkelä, M.M.; Nikulin, Y. Three-dimensional bin packing problem with a stability rejection criterion. In Proceedings of the VII European Congress on Computational Methods in Applied Sciences and Engineering, ECCOMAS Congress, Crete Island, Greece, 5–10 June 2016. [Google Scholar]
- Faroe, O.; Pisinger, D.; Zachariasen, M. Guided local search for the three-dimensional bin-packing problem. INFORMS J. Comput. 2003, 15, 267–283. [Google Scholar] [CrossRef]
- Crainic, T.G.; Perboli, G.; Tadei, R. TS2PACK: A two-level tabu search for the three-dimensional bin packing problem. Eur. J. Oper. Res. 2009, 195, 744–760. [Google Scholar] [CrossRef]
- Pedruzzi, S.; Nunes LP, A.; Rosa RD, A.; Arpini, B.P. A mathematical model to optimize the volumetric capacity of trucks utilized in the transport of food products. Gestão Produção 2016, 23, 350–364. [Google Scholar] [CrossRef]
- Zhao, H.; Yu, Y.; Xu, K. Learning Efficient Online 3D Bin Packing on Packing Configuration Trees. Int. Conf. Learn. Represent. 2022. [Google Scholar]
- Hu, H.; Zhang, X.; Yan, X.; Wang, L.; Xu, Y. Solving a new 3D bin packing problem with deep reinforcement learning method. arXiv 2017, arXiv:1708.05930. [Google Scholar]
- Duan, L.; Hu, H.; Qian, Y.; Gong, Y.; Zhang, X.; Wei, J.; Xu, Y. A multi-task selected learning approach for solving 3D flexible bin packing problem. arXiv 2019, arXiv:1804.06896. [Google Scholar]
- Hu, R.; Xu, J.; Chen, B.; Gong, M.; Zhang, H.; Huang, H. TAP-Net: Transport-and-Pack using reinforcement learning. ACM Trans. Graph. 2020, 39, 232:1–232:15. [Google Scholar] [CrossRef]
- Zhang, J.; Zi, B.; Ge, X. Attend2Pack: Bin packing through deep reinforcement learning with attention. arXiv 2021, arXiv:2107.04333. [Google Scholar]
- Zhao, H.; She, Q.; Zhu, C.; Yang, Y.; Xu, K. Online 3D bin packing with constrained deep reinforcement learning. arXiv 2020, arXiv:2006.14978. [Google Scholar] [CrossRef]
- Karabulut, K.; İnceoğlu, M.M. A hybrid genetic algorithm for packing in 3d with deepest bottom left with fill method. In International Conference on Advances in Information Systems; Yakhno, T., Ed.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 441–450. [Google Scholar]
- Ha, C.T.; Nguyen, T.T.; Bui, L.T.; Wang, R. An online packing heuristic for the three-dimensional container loading problem in dynamic environments and the Physical Internet. In European Conference on the Applications of Evolutionary Computation; Squillero, G., Sim, K., Eds.; Springer: Cham, Switzerland, 2017; pp. 110–127. [Google Scholar]
- Verma, R.; Singhal, A.; Khadilkar, H.; Basumatary, A.; Nayak, S.; Singh, H.V.; Kumar, S.; Sinha, R. A generalized reinforcement learning algorithm for online 3D bin-packing. arXiv 2020, arXiv:2007.00463. [Google Scholar]
- Nguyen, T.-H.; Tran, V.-T.; Doan, P.-Q.; Mac, T.-T. A Novel Heuristic Algorithm for Online 3D Bin Packing. In Proceedings of the 2021 21st International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 12–15 October 2021; pp. 1993–1997. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Merging Results | |
|---|---|---|
| Main Spaces to Merge | New Spaces | |
or |  |  |
 |  | |
or |  |  |
or |  |  |
or |  |  |
 |  | |
or |  |  |
or |  |  |
| Conditions | Splitting Results | |
|---|---|---|
| Case 1: LK = l or WK = w | ||
 | 1 main space K1 | |
 | 1 main space K1 and 1 main/subspace K4 | |
 | 1 main space K1 and 1 main/subspace K2 | |
| Case 2: LK − l < Lmin or WK − w < Wmin | ||
 | 1 main space K1 and 2 subspaces K2 and K4 | |
 | 2 main spaces K1 and K4 and 1 subspace K2 | |
 | 2 main spaces K1 and K2 and 1 subspace K4 | |
| Case 3: LK − l ≥ Lmin and WK − w ≥ Wmin | ||
 | 3 main spaces K1, K2, K4 and 1 main/subspace K3 | |
 | 2 main spaces K1, K2 and 1 main/subspace K4 | |
 | 2 main spaces K1, K4 and 1 main/subspace K2 | |
 | 2 main spaces K1, K2 and 1 subspace K4 | |
 | 2 main spaces K1, K4 and 1 subspace K2 | |
 | 1 main space K1 and 2 subspaces K2, K4 | |
| Conditions | Merging Results | |
|---|---|---|
| Spaces to Merge | New Spaces | |
 | ||
 | ||
| Conditions | Merging Results | |
|---|---|---|
| Spaces to Merge | New Spaces | |
 |  | |
 |  | |
 |  | |
 |  | |
| Method | Space Utilization (%) | No. of Items |
|---|---|---|
| Proposed method | 51.7 | 12.7 |
| Zhao et al. (trained on RS) [24] | 50.5 | 12.2 |
| Zhao et al. (boundary rule) [24] | 34.9 | 8.7 |
| Karabulut and İnceoğlu [25] | 43.1 | 10.6 |
| Ha et al. [26] | 37.1 | 9.1 |
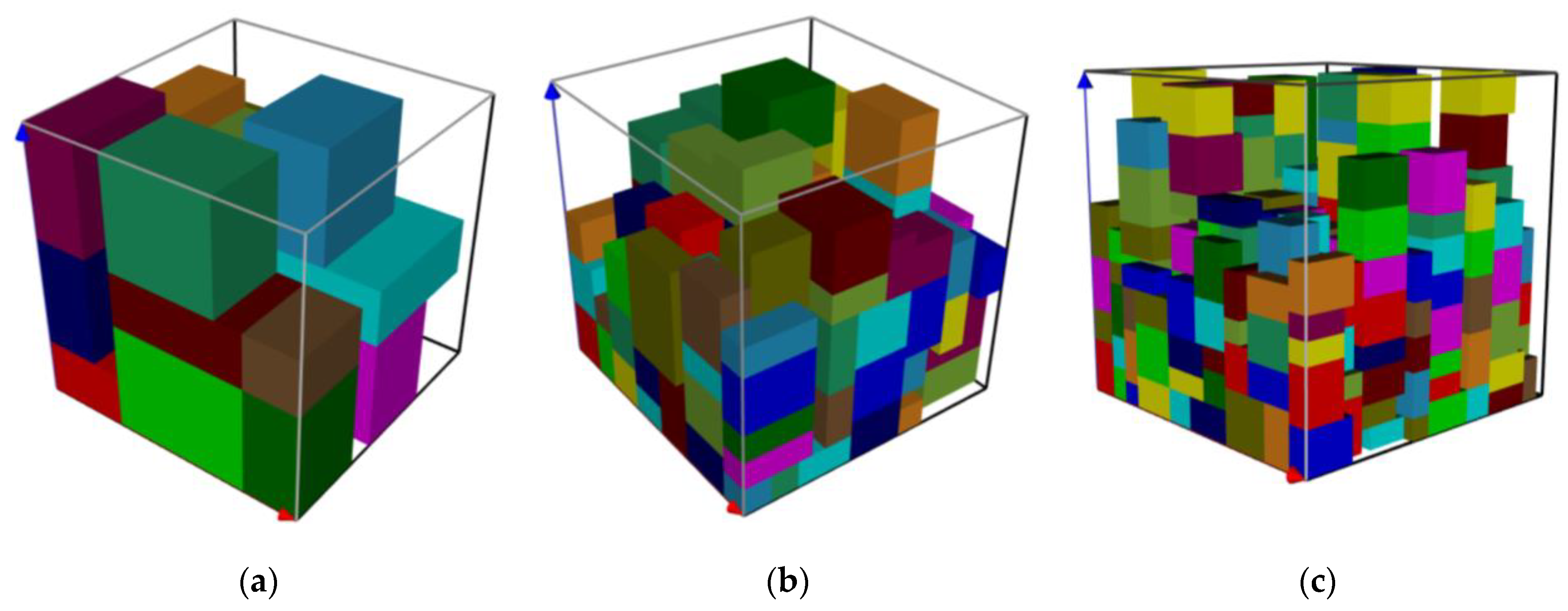
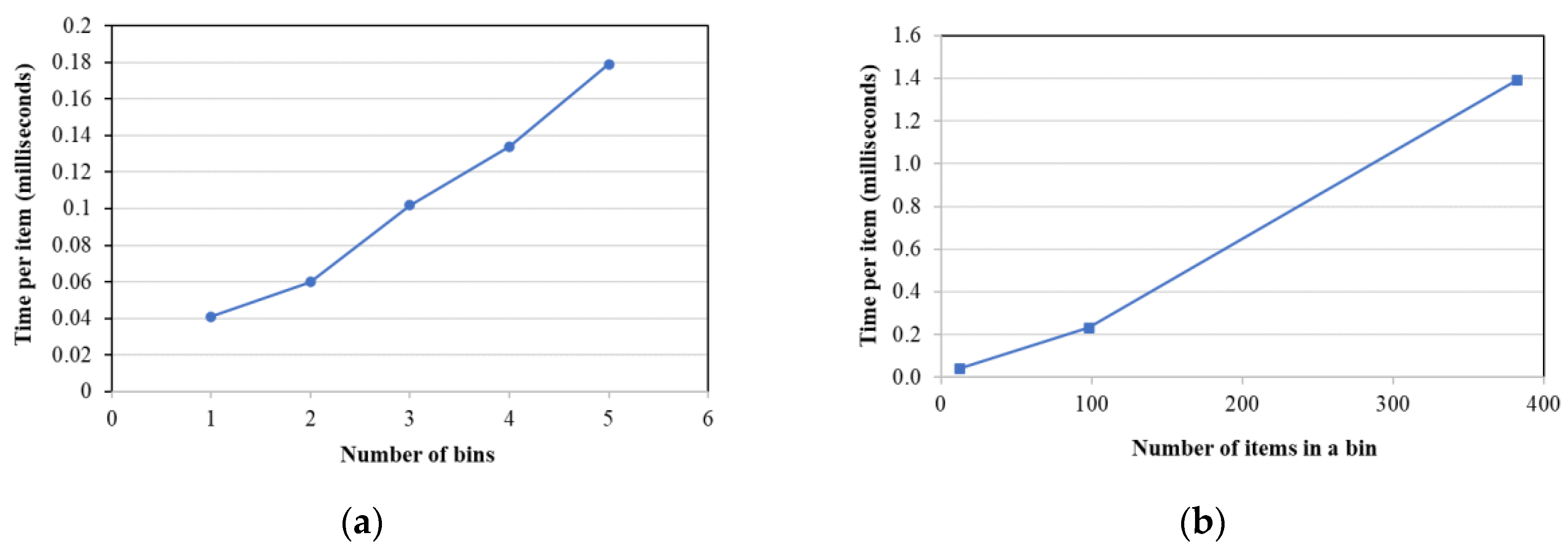
| Bin Size (L × W × H) | Space Utilization (%) | No. of Items | Time per Item (ms) | |
|---|---|---|---|---|
| Proposed Method | Zhao et al. [24] | |||
| 10 × 10 × 10 | 51.7 | 50.5 | 12.7 | 0.04 |
| 20 × 20 × 20 | 51.9 | 58.1 | 98.1 | 0.23 |
| 30 × 30 × 30 | 60.5 | 49.0 | 382.5 | 1.40 |
| No. of Bins | 1st Bin | 2nd Bin | 3rd Bin | 4th Bin | 5th Bin | Average |
|---|---|---|---|---|---|---|
| 1 | 51.7 | 51.7 | ||||
| 2 | 70.3 | 61.0 | 65.7 | |||
| 3 | 77.5 | 75.9 | 60.3 | 71.2 | ||
| 4 | 80.5 | 81.6 | 75.1 | 60.4 | 74.4 | |
| 5 | 81.7 | 83.8 | 81.5 | 75.3 | 61.0 | 76.7 |
| No. of Bins | 1st Bin | 2nd Bin | 3rd Bin | 4th Bin | 5th Bin | Average |
|---|---|---|---|---|---|---|
| 1 | 12.7 | 12.7 | ||||
| 2 | 20.5 | 10.8 | 15.7 | |||
| 3 | 24.2 | 15.9 | 10.4 | 16.8 | ||
| 4 | 26.1 | 18.4 | 15.3 | 10.3 | 17.5 | |
| 5 | 27.2 | 19.4 | 18.0 | 15.1 | 10.3 | 18.0 |
| Case Study | Item Size (l × w × h) | Bin Size (L × W × H) | No. of Items | Packing Results |
|---|---|---|---|---|
| 1 | 95 × 75 × 20 | 225 × 95 × 80 | 12 |  |
| 2 | 95 × 75 × 55 | 150 × 95 × 110 | 4 |  |
| 3 | 95 × 60 × 75 | 300 × 95 × 75 | 5 |  |
| 4 | 100 × 70 × 60 | 100 × 70 × 300 | 5 |  |
| 5 | 90 × 75 × 70 | 75 × 270 × 70 | 3 |  |
| 6 | 115 × 90 × 75 | 230 × 90 × 75 | 2 |  |
| 7 | 50 × 40 × 50 | 250 × 80 × 50 | 10 |  |
| 8 | 85 × 55 × 75 | 85 × 220 × 75 | 4 |  |
| 9 | 25 × 70 × 80 | 125 × 70 × 80 | 5 |  |
| 10 | 85 × 75 × 20 | 300 × 85 × 60 | 12 |  |
| 11 | 85 × 35 × 75 | 210 × 85 × 75 | 6 |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.-H.; Nguyen, X.-T. Space Splitting and Merging Technique for Online 3-D Bin Packing. Mathematics 2023, 11, 1912. https://doi.org/10.3390/math11081912
Nguyen T-H, Nguyen X-T. Space Splitting and Merging Technique for Online 3-D Bin Packing. Mathematics. 2023; 11(8):1912. https://doi.org/10.3390/math11081912
Chicago/Turabian StyleNguyen, Thanh-Hung, and Xuan-Thuan Nguyen. 2023. "Space Splitting and Merging Technique for Online 3-D Bin Packing" Mathematics 11, no. 8: 1912. https://doi.org/10.3390/math11081912