
Comprehensive Analysis of Multi-Objective Optimization Algorithms for Sustainable Hybrid Electric Vehicle Charging Systems


Abstract
:1. Introduction
Contribution
- Development of a bi-objective optimization model that balances TNPC and LPSP objectives.
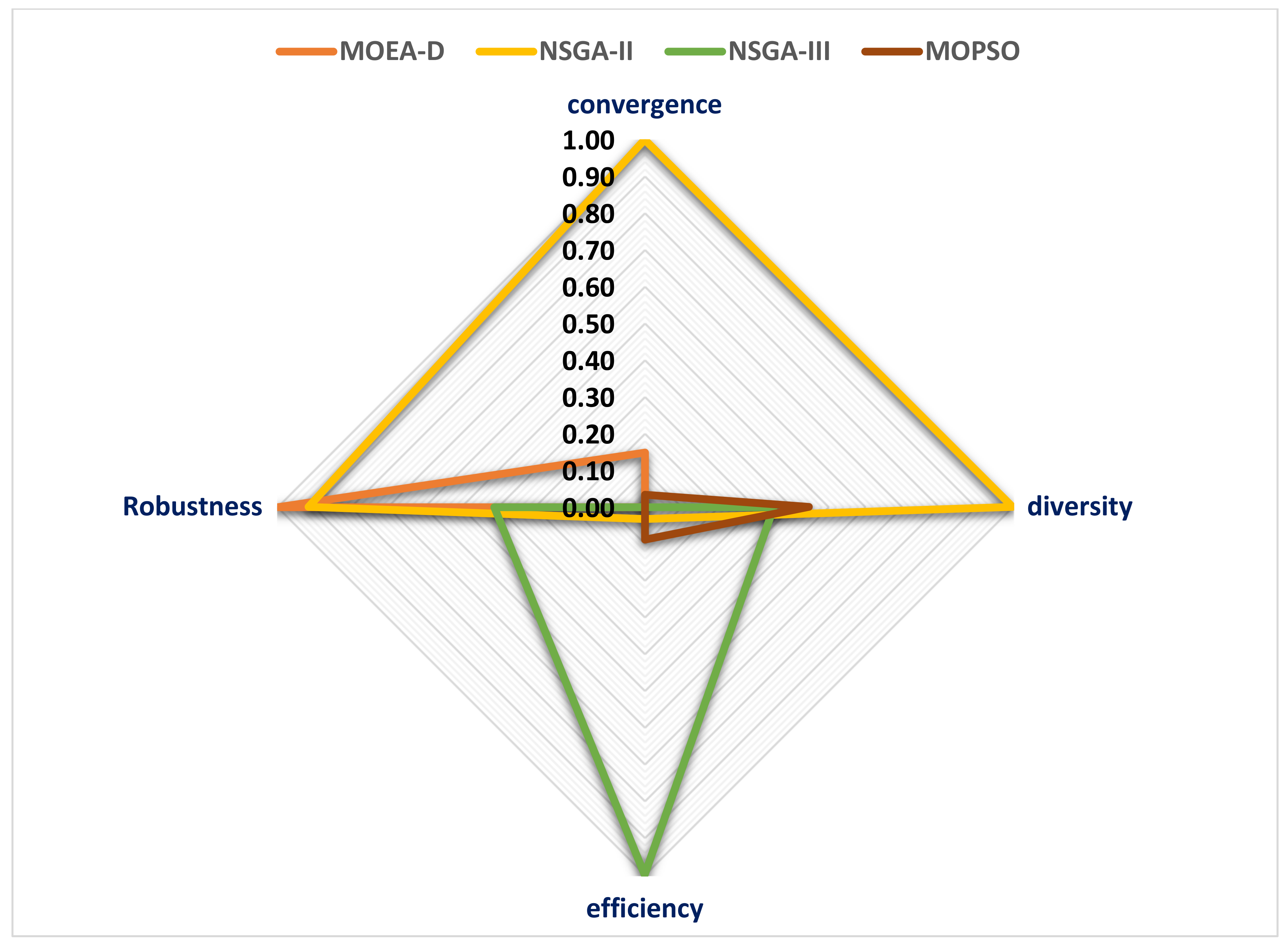
- Evaluation of four multi-objective algorithms based on criteria, such as convergence, diversity, efficiency, scalability, and robustness, to determine the most suitable algorithm for attaining the Pareto optimal solution for the PVWB/EVCS system.
- Utilization of the Pareto method for selecting the Pareto optimal solution.
- Investigation of sensitivity analysis by considering various factors, such as cost of Lithium-Ion batteries, PV system, and WT.
2. Literature Review
2.1. Review of Hybrid EVCS System
2.2. Review the Optimization Methods
3. Mathematical Modeling of RE System Components
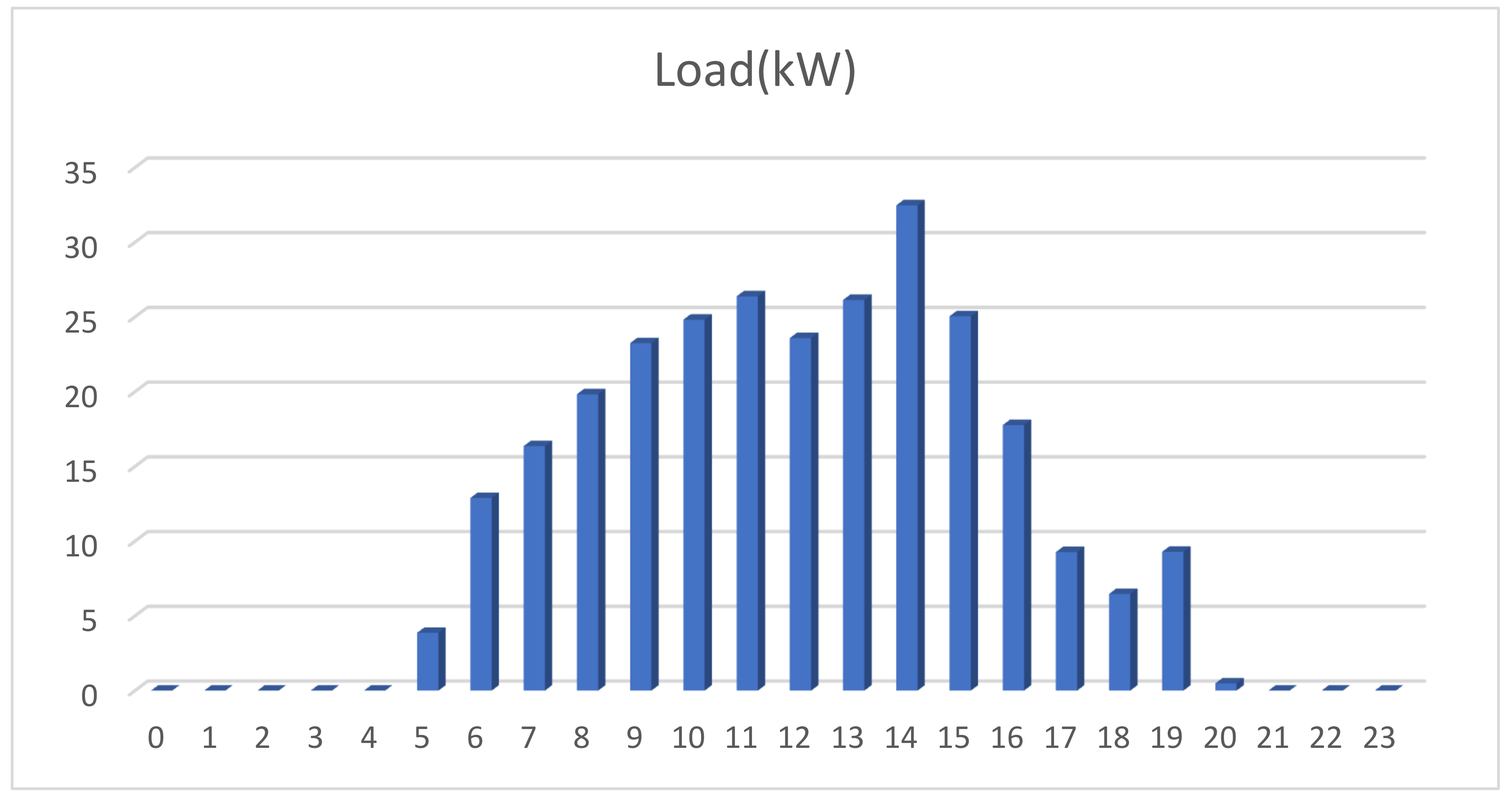
3.1. EV Charging Station Load Model
3.2. PV Model
3.3. Wind Turbine Model
3.4. Battery Storage System Model
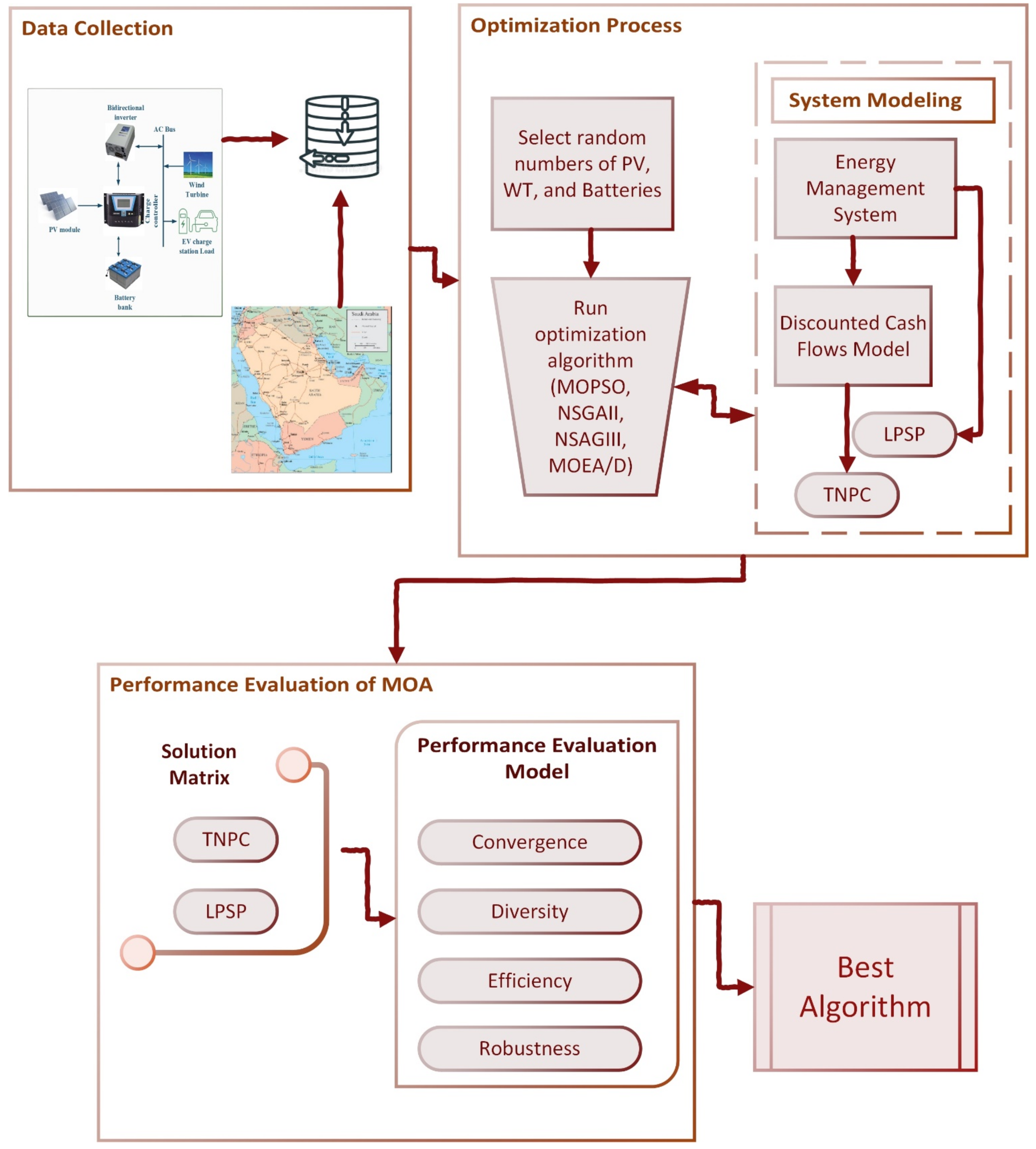
4. The Optimization Framework
4.1. Total Net Present Cost
4.2. Loss of Power Supply Probability
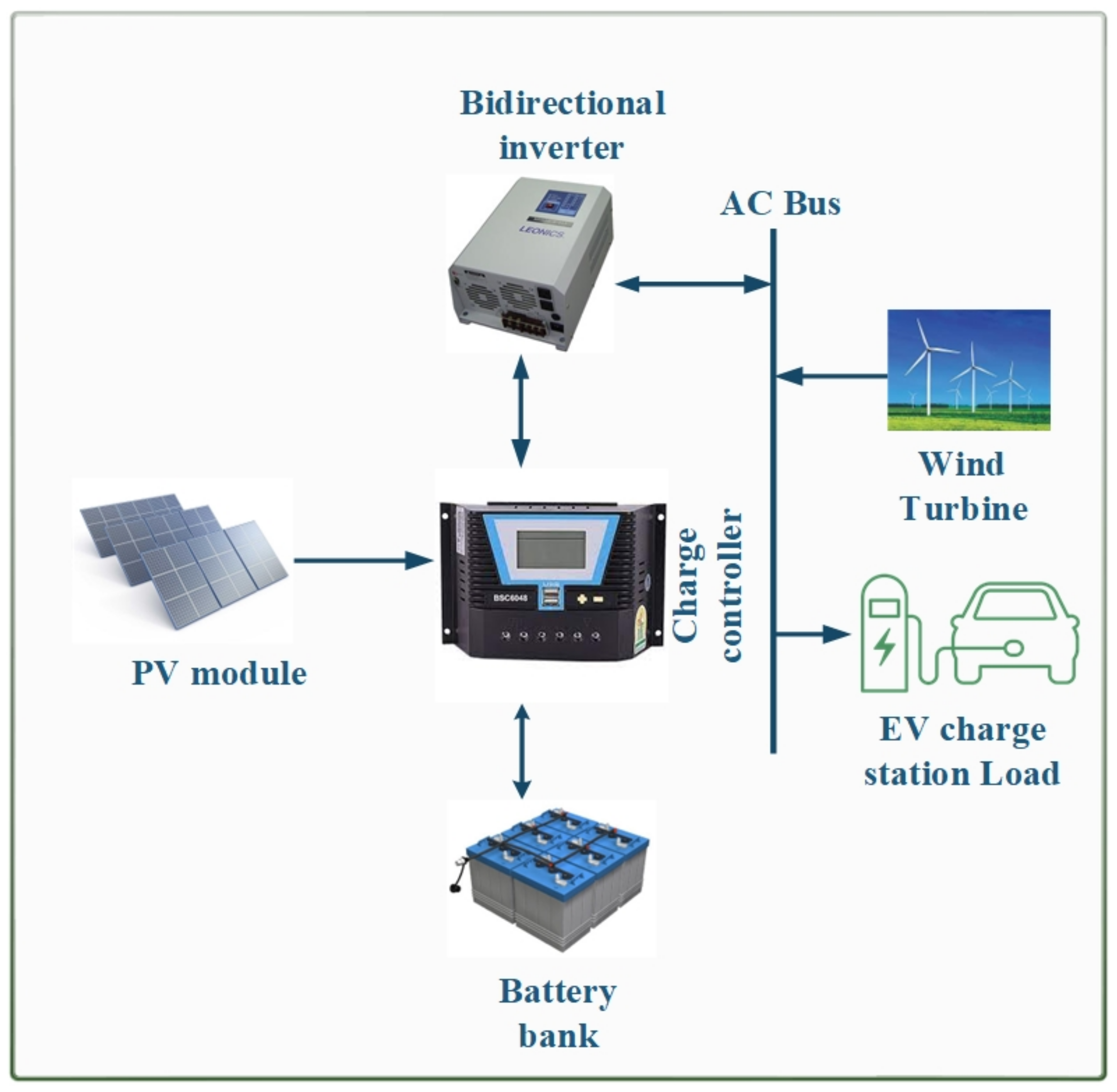
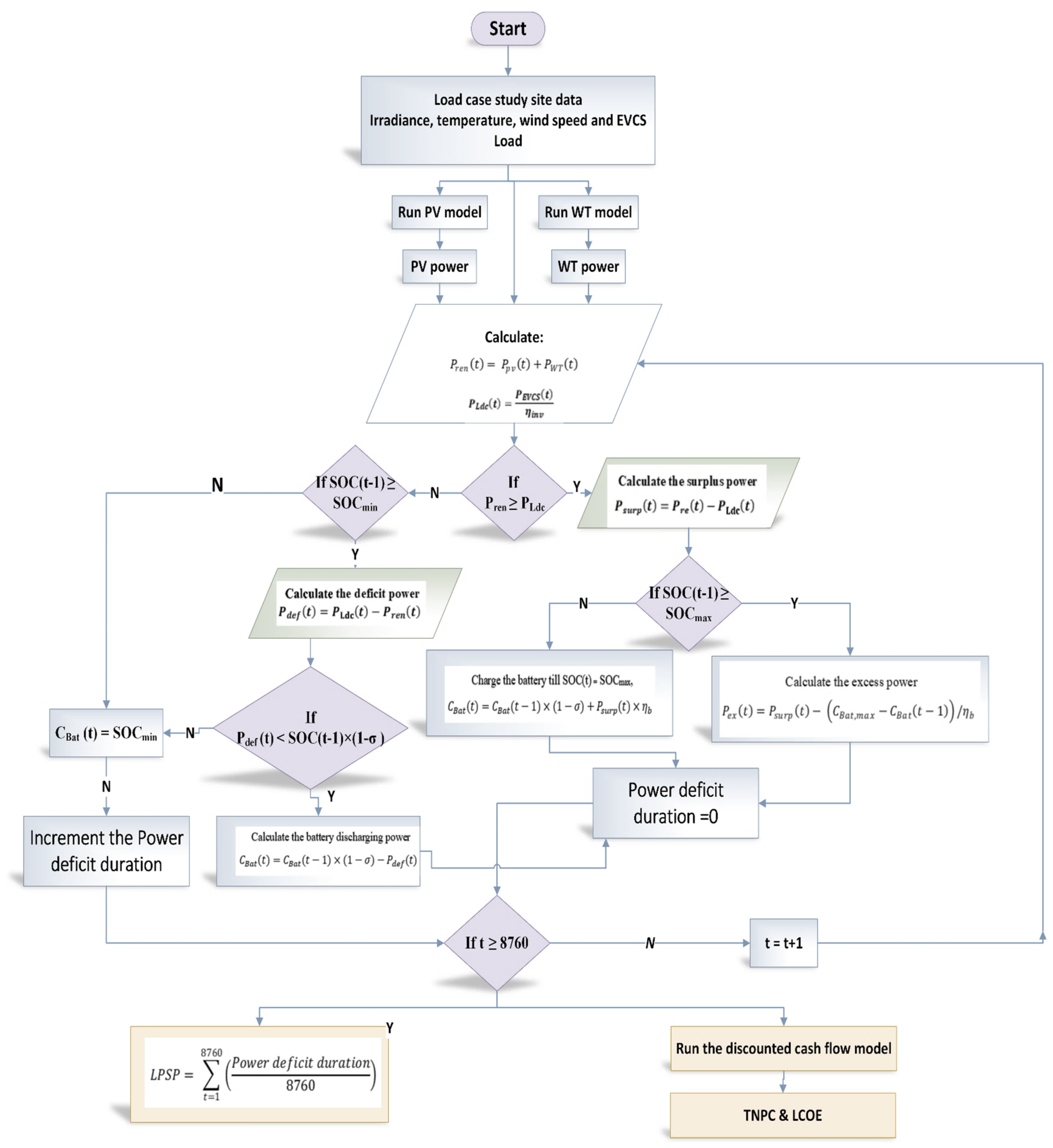
4.3. The Proposed System’s Energy Management Technique
5. Optimization Algorithms
5.1. Multi-Objective Particle Swarm Optimization
| Algorithm 1: Multi-objective Particle Swarm Optimization (MOPSO) |
| 1. Initialize population of particles |
| 2. Evaluate objective functions for each particle and calculate their fitness values |
| 3. Identify non-dominated solutions among the particles and store them in a reference set. |
| 4. Repeat steps 4.1 to 4.4 until a stopping criterion is met or for a predefined number of iterations. |
| 4.1. Update velocity of each particle based on optimal positions of other particles and non-dominated solutions in reference set. |
| 4.2. Update position of each particle based on updated velocity. |
| 4.3. Evaluate new objective functions for each updated particle and calculate their fitness values. |
| 4.4. Update reference set with newly evaluated solutions. |
| 5. Select best solution from reference set based on criteria specified in optimization problem. |
| 6. Return the best solution as the result of the optimization process. |
5.2. Non-Dominated Sorting Genetic Algorithm II
| Algorithm 2: Non-dominated Sorting Genetic Algorithm (NSGA-II) |
| 1. Problem Definition |
| a. Define the objective function to be optimized. |
| b. Define the constraints that must be satisfied. |
| 2. Initialization |
| a. Generate a set of initial solutions. |
| b. Evaluate the solutions using the objective function and constraints. |
| c. Create an initial non-dominated set using the evaluated solutions. |
| 3. Fast Non-dominated Sorting |
| a. Sort the solutions into non-domination levels to create a front of non-dominated |
| solutions. |
| b. Assign a crowding distance to each solution in each front. |
| 4. Create the Offspring Population |
| a. Select solutions from the current front to generate offspring solutions through |
| genetic operators (crossover and mutation). |
| b. Evaluate the offspring solutions using the objective function and constraints. |
| 5. Merge the Parent and Offspring Populations |
| a. Combine the parent and offspring solutions into a single set. |
| 6. Environmental Selection |
| a. Select the next generation of solutions from the combined set, based on non- |
| domination level and crowding distance. |
| b. Solutions with the lowest non-domination level and highest crowding distance are |
| preferred. |
| 7. Repeat from Step 3 |
| a. Repeat the process from Step 3 until a stopping criterion is met (maximum |
| number of generations). |
| 8. Return the best solution |
| a. Return the solution with the best fitness as the result of the optimization. |
5.3. Non-Dominated Sorting Genetic Algorithm III
| Algorithm 3: Non-dominated Sorting Genetic Algorithm (NSGA-III) |
| 1. Initialization: Generate an initial population of solutions, where each solution represents a candidate design for the (PVWB/EVCS) system. 2. Non-dominated Sorting: Sort the solutions in the initial population based on their non-domination levels. A solution is considered non-dominated if it is not dominated by any other solution in the population. 3. Crowding Distance Calculation: Calculate the crowding distance of each solution. The crowding distance measures the degree of separation between solutions in the population and helps to prevent premature convergence. 4. Selection: Select a set of solutions to form the mating pool for the next generation. The selection process is based on the non-dominated levels and crowding distances of the solutions. 5. Mating: Use genetic operators such as crossover and mutation to generate offspring solutions from the mating pool. 6. Evaluation: Evaluate the fitness of the offspring solutions by calculating their objectives. 7. Non-dominated Sorting and Crowding Distance Calculation: Repeat steps 2 to 3 for the offspring solutions. 8. Replacement: Replace the solutions in the current population with the offspring solutions to form the next generation. 9. Termination: Repeat steps 4 to 8 until a termination criterion is met, such as a maximum number of generations. 10. Result: Return the final set of non-dominated solutions as the result of the optimization process. These solutions represent the best trade-off designs for the (PVWB/EVCS) system based on the objectives used in the optimization process. |
5.4. Multi-Objective Evolutionary Algorithm Based on Decomposition
| Algorithm 4: Multi-Objective Evolutionary Algorithm based on Decomposition (MOEA/D) |
Step 1: Initialization
|
5.5. Performance Evaluation of Multi-Objective Optimization Algorithms
| Algorithm 5: Performance Evaluation of Multi-Objective Optimization Algorithms |
| INPUT: Set of multi-objective optimization algorithms, problem to be optimized (sizing of the PVWB/EVCS system) |
| OUTPUT: Best algorithm for sizing the PVWB/EVCS system |
| 1. SELECT a set of multi-objective optimization algorithms to be evaluated, including algorithms such as MOPSO, NSGA-II, NSGA-III, MOEA/D. |
| 2. DEFINE the problem to be optimized, in this case the sizing of the PVWB/EVCS system. |
| 3. FOR each algorithm, |
| a. RUN it several times to find a set of solutions. |
| b. CALCULATE the performance metrics for each set of solutions (Convergence, Diversity, Efficiency, and Robustness). |
| 4. DISPLAY the performance metrics for each algorithm in a table. |
| 5. Compute the performance score for each algorithm by summing up the performance metrics for each algorithm. |
| 6. COMPARE the algorithms based on the performance metrics and determine the best-performing algorithm. |
5.5.1. Convergence Metric
5.5.2. Diversity Metric
5.5.3. Efficiency Metric
5.5.4. Robustness Metric
6. Results and Discussion
6.1. Case Study
6.2. Results
6.3. Sensitivity Analysis
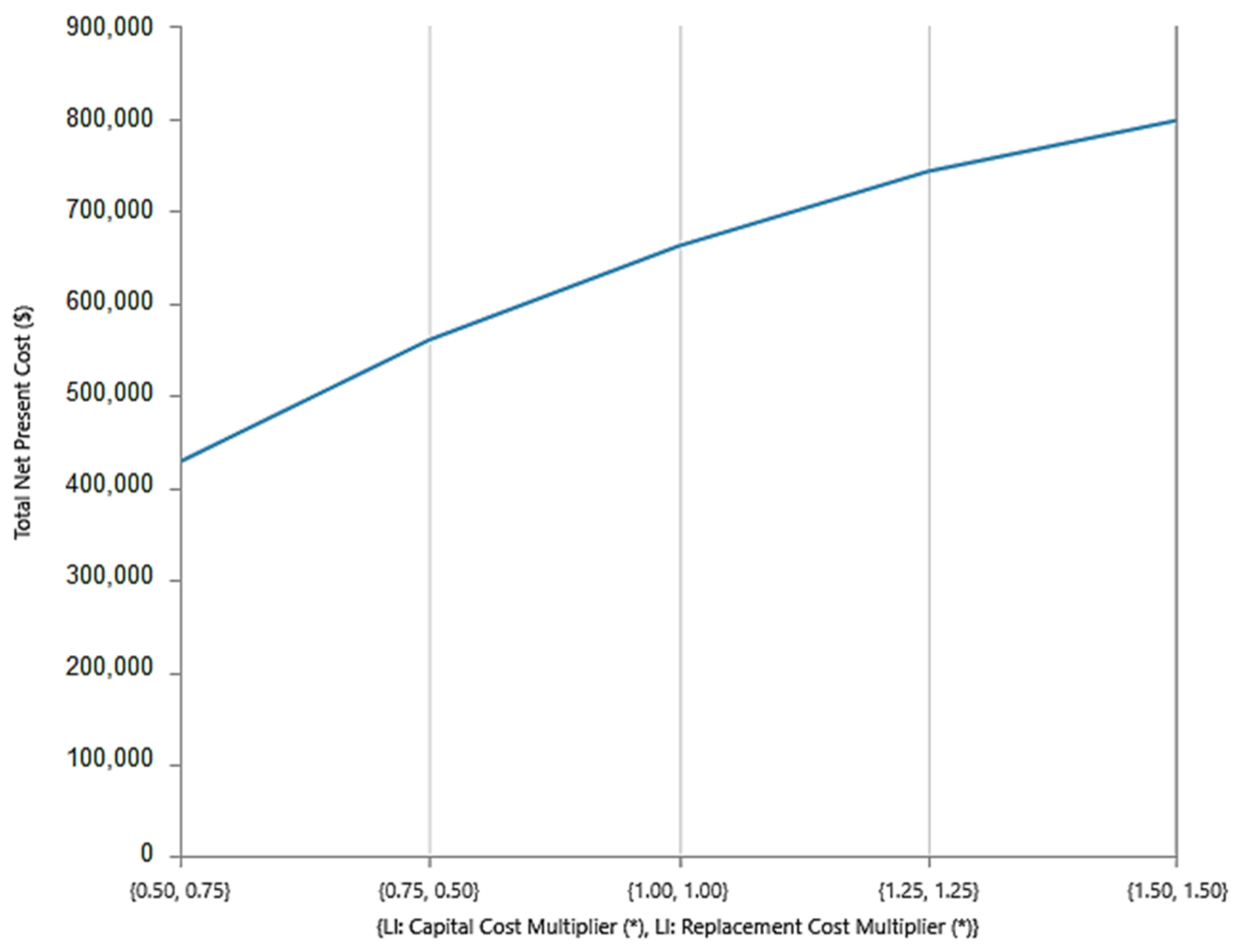
6.3.1. Sensitivity Analysis of Lithium-Ion Cost and Its Implications
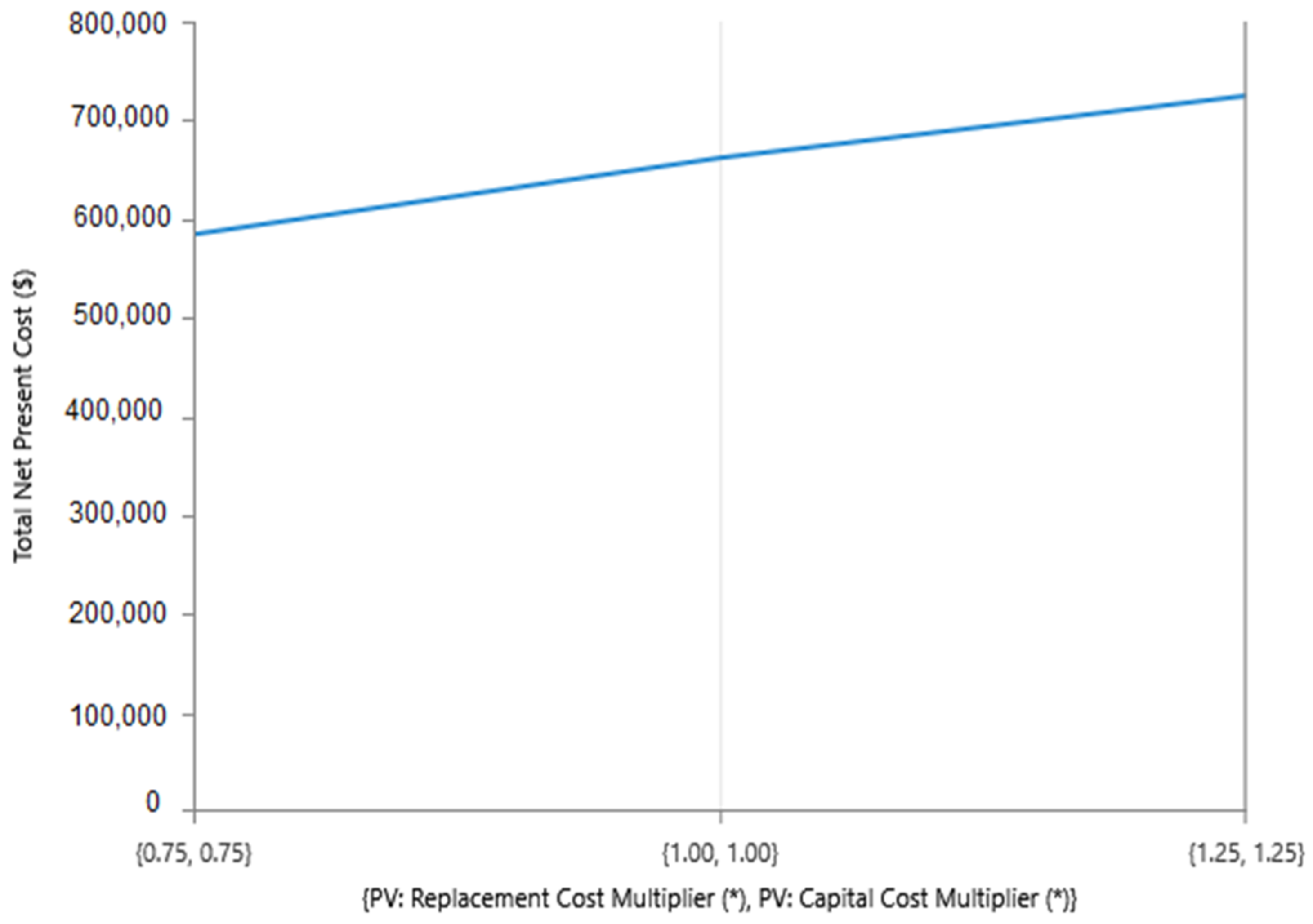
6.3.2. Sensitivity Analysis of PV System Cost and Its Effects
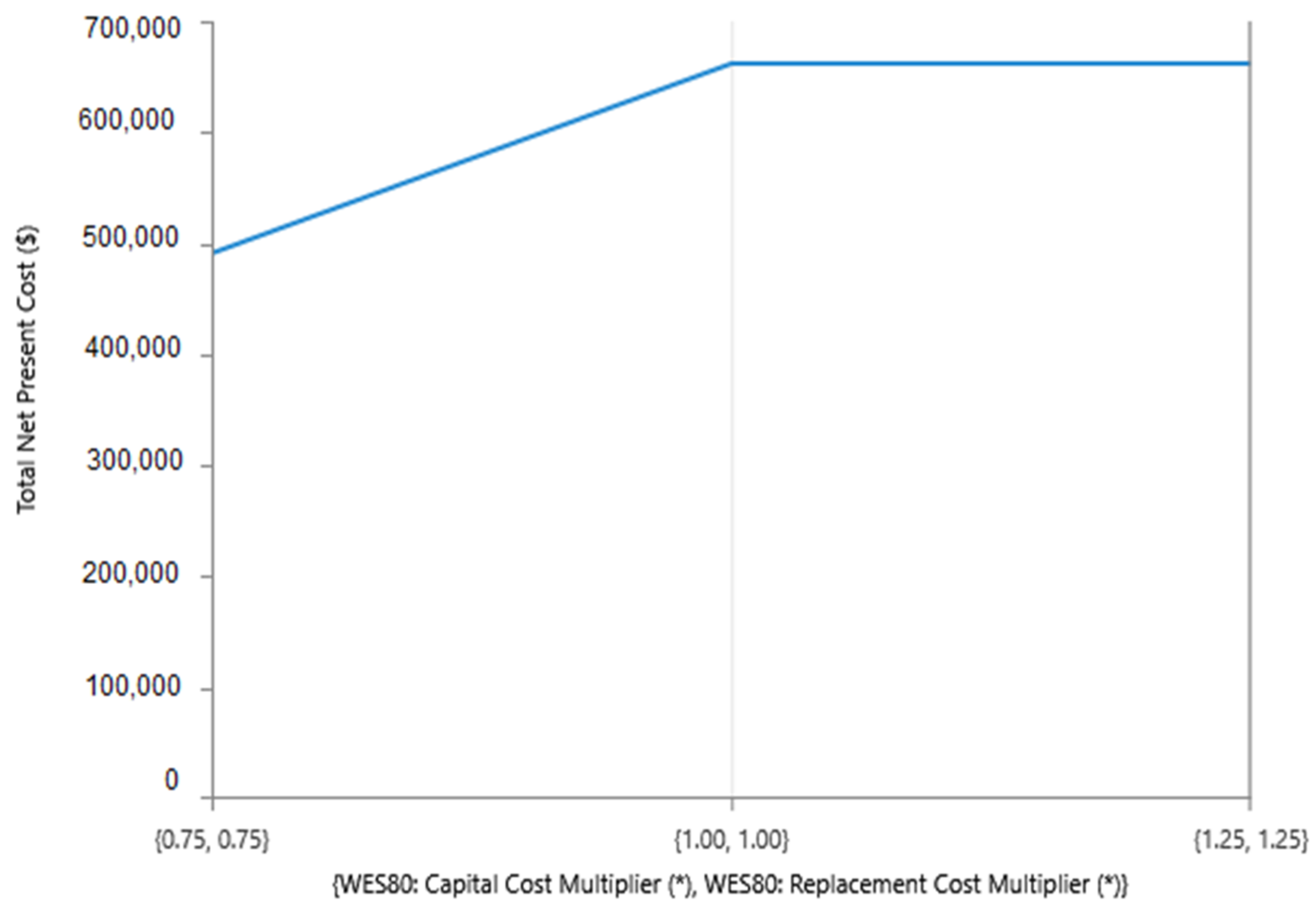
6.3.3. Sensitivity Analysis of Wind Turbine Cost and Its Effects
7. Conclusions
- ➣
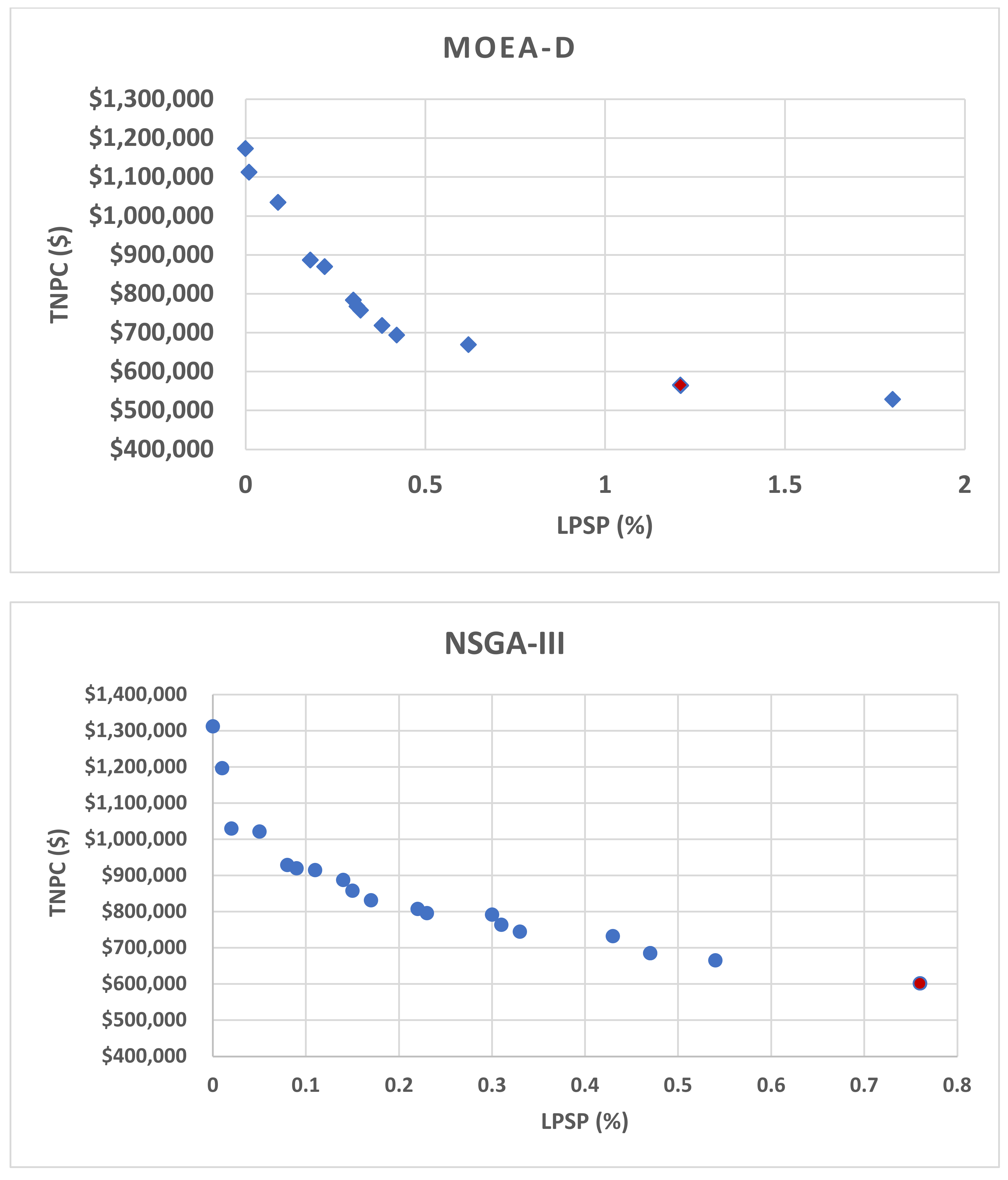
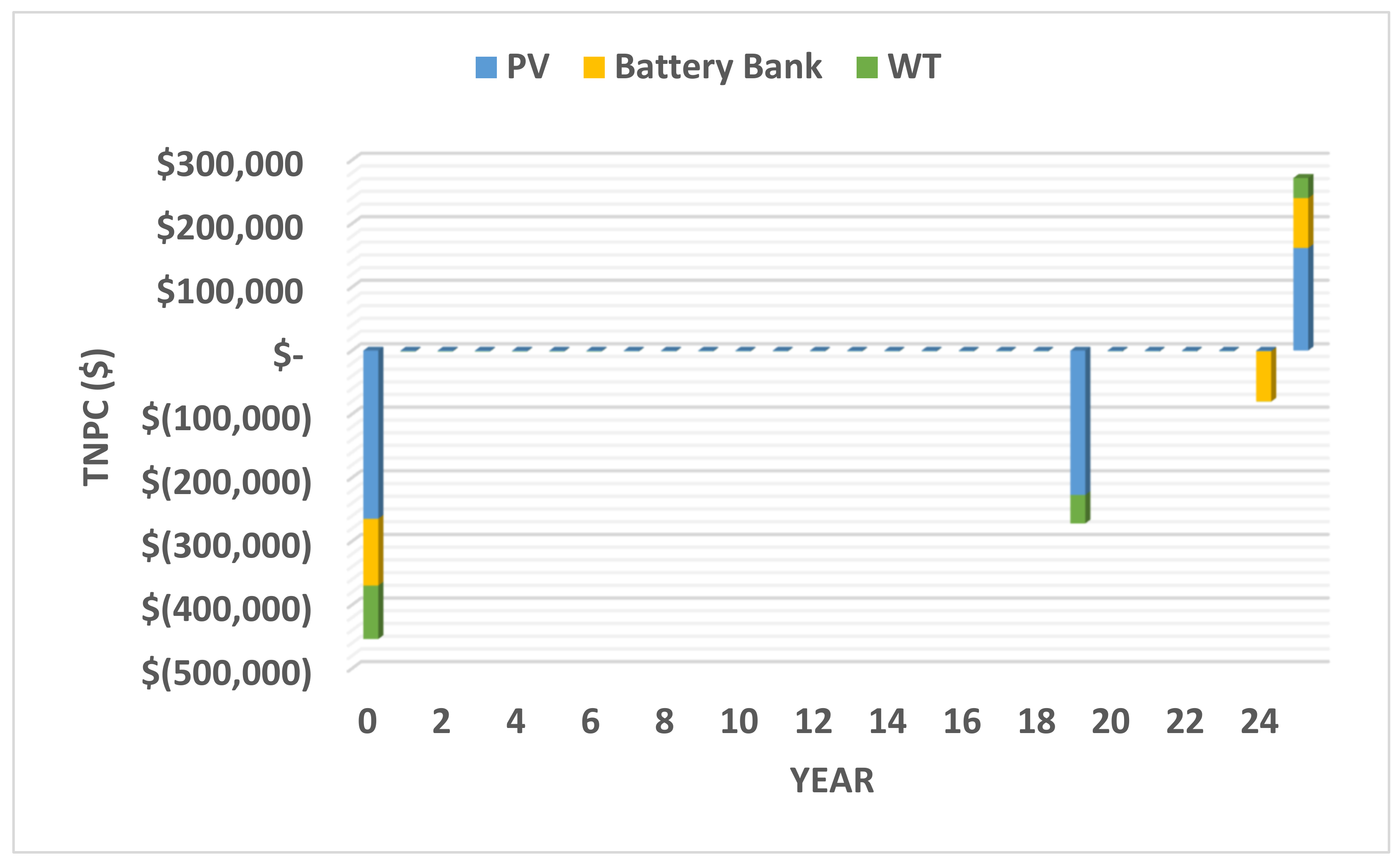
- The optimum system consisted of a 223 kW PV system, an 80-kW wind turbine, and seven Lithium-Ion battery banks, with an TNPC of USD 564,846, an LCOE of 0.2521 USD/kWh, and an LPSP of 1.21%.
- ➣
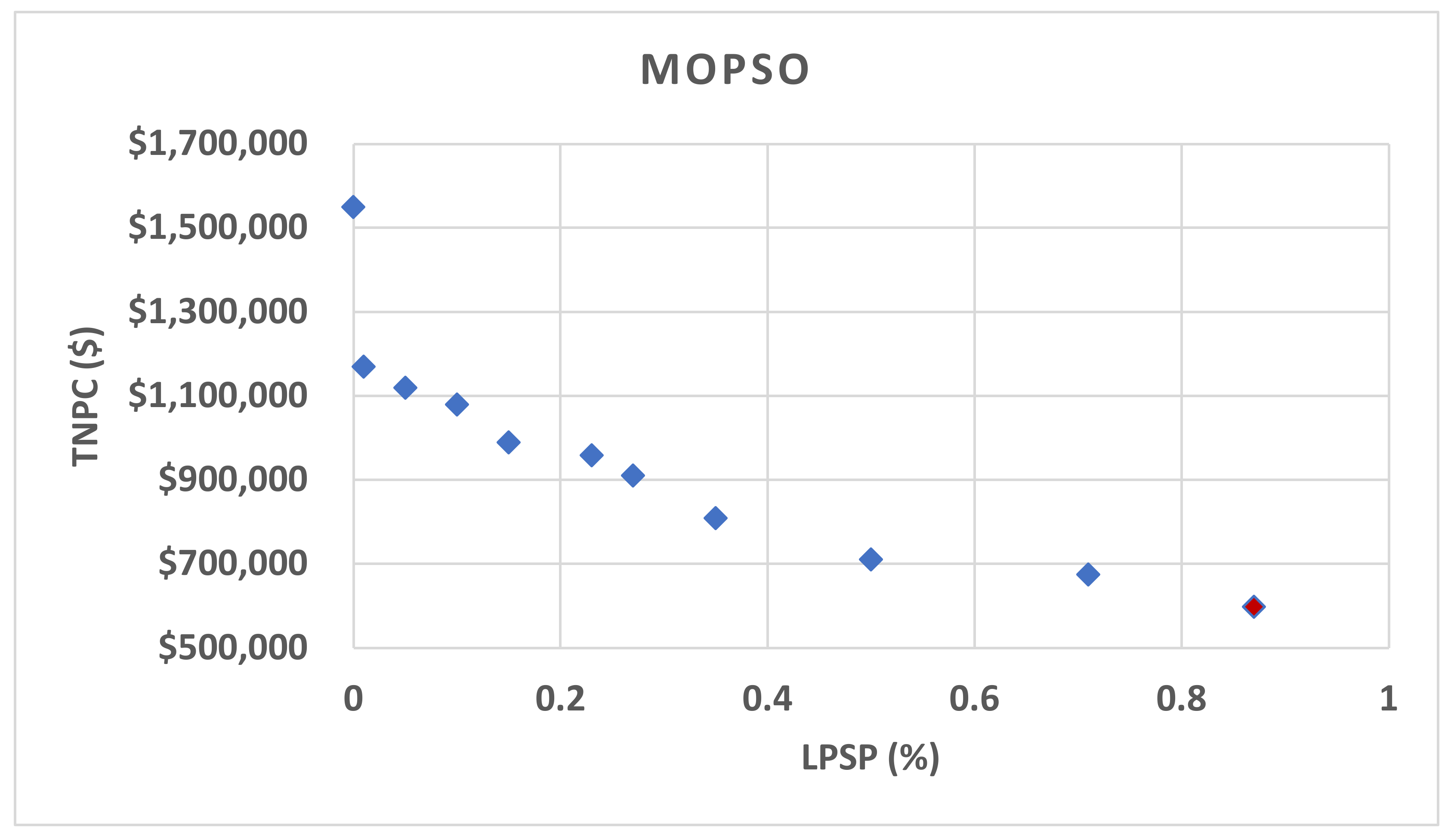
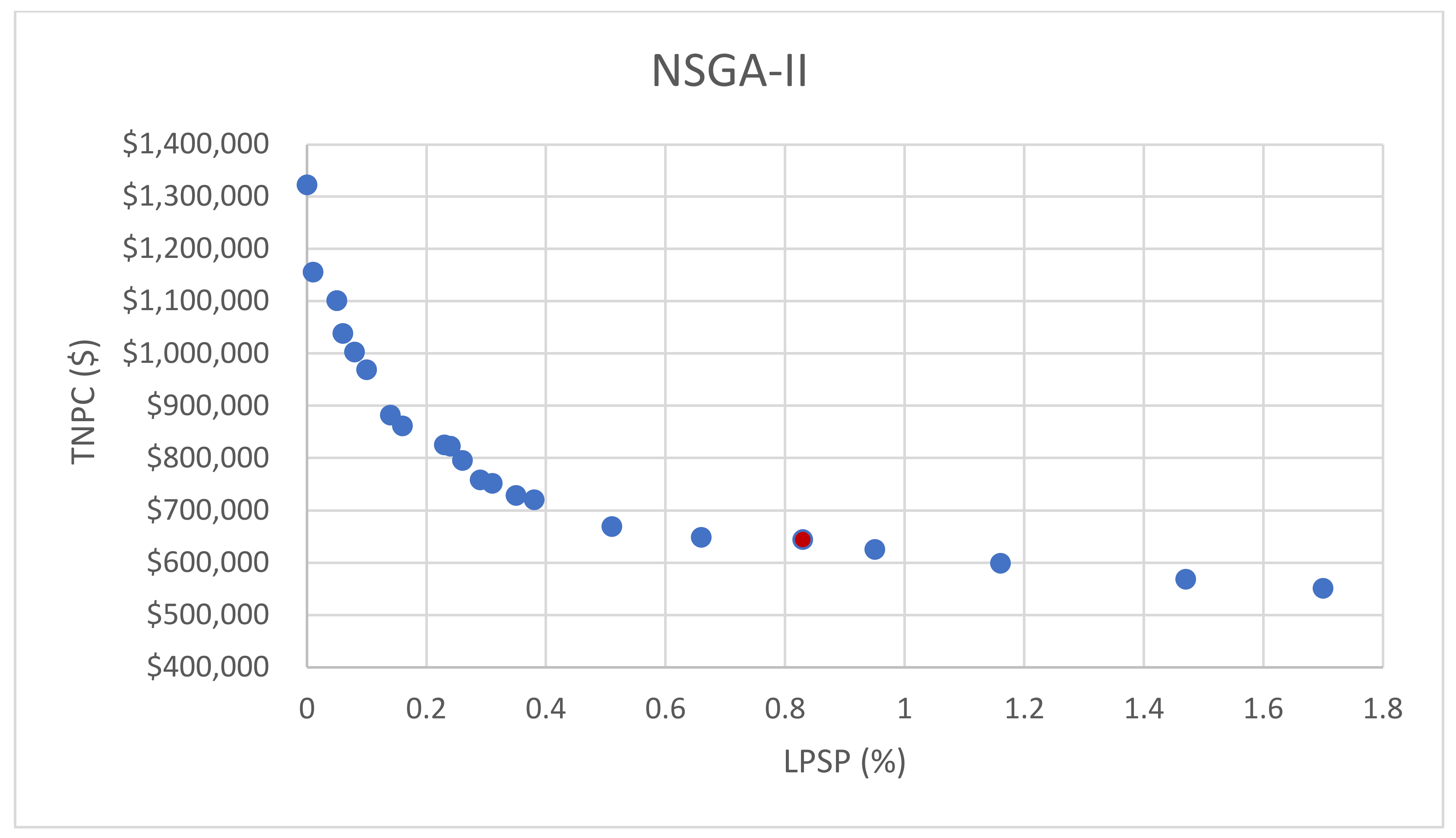
- The Pareto front plots of TNPC vs. LPSP for the four suggested optimization algorithms showed a clear trade-off between the two objectives.
- ➣
- NSGA-II achieved the highest overall performance among the four algorithms, with the best scores for convergence and diversity.
- ➣
- NSGA-III had the highest efficiency score, while MOPSO attained the highest diversity score.
- ➣
- MOEA/D was observed to have the highest robustness score, indicating its suitability for diverse problem conditions.
- ➣
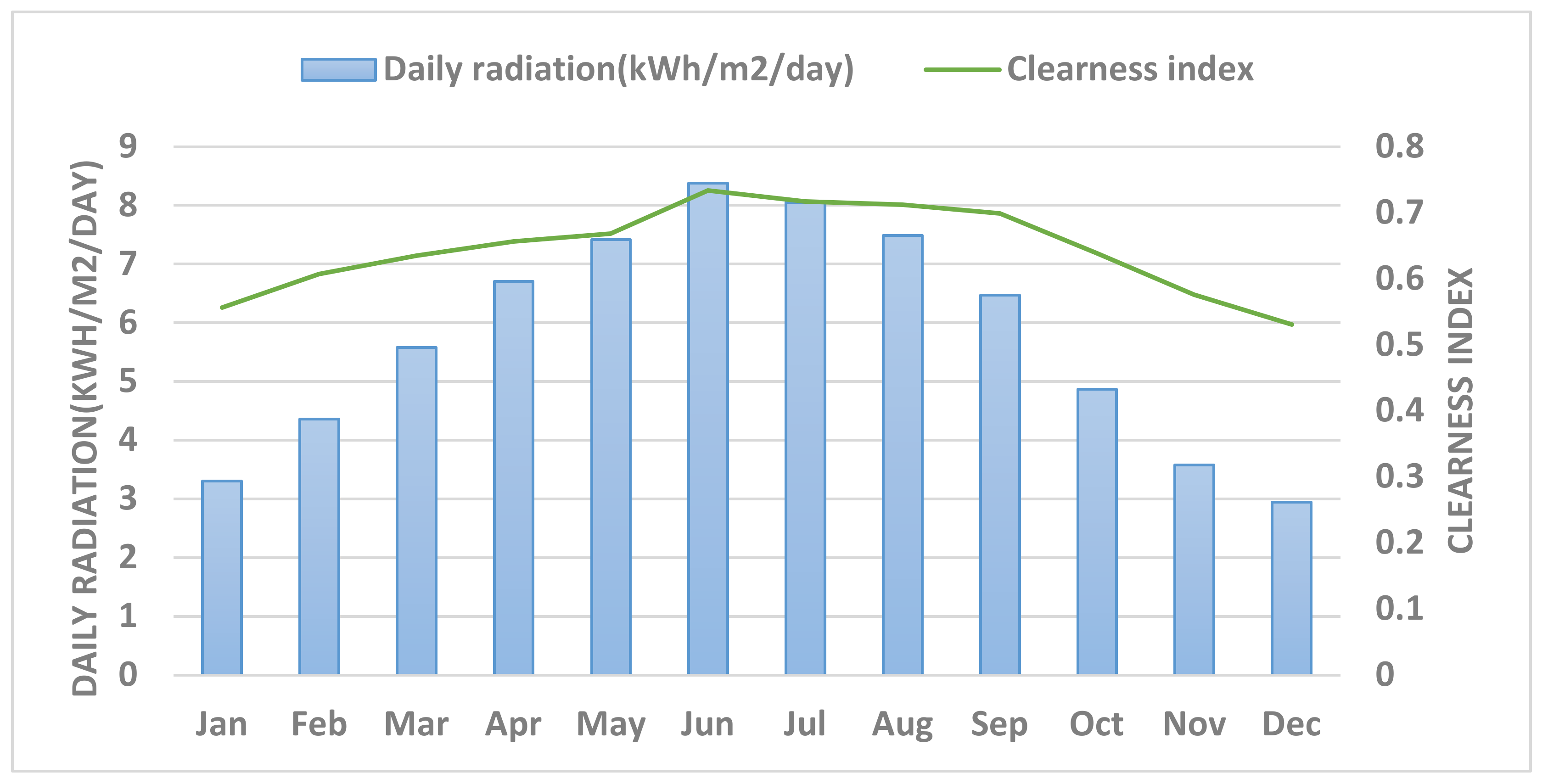
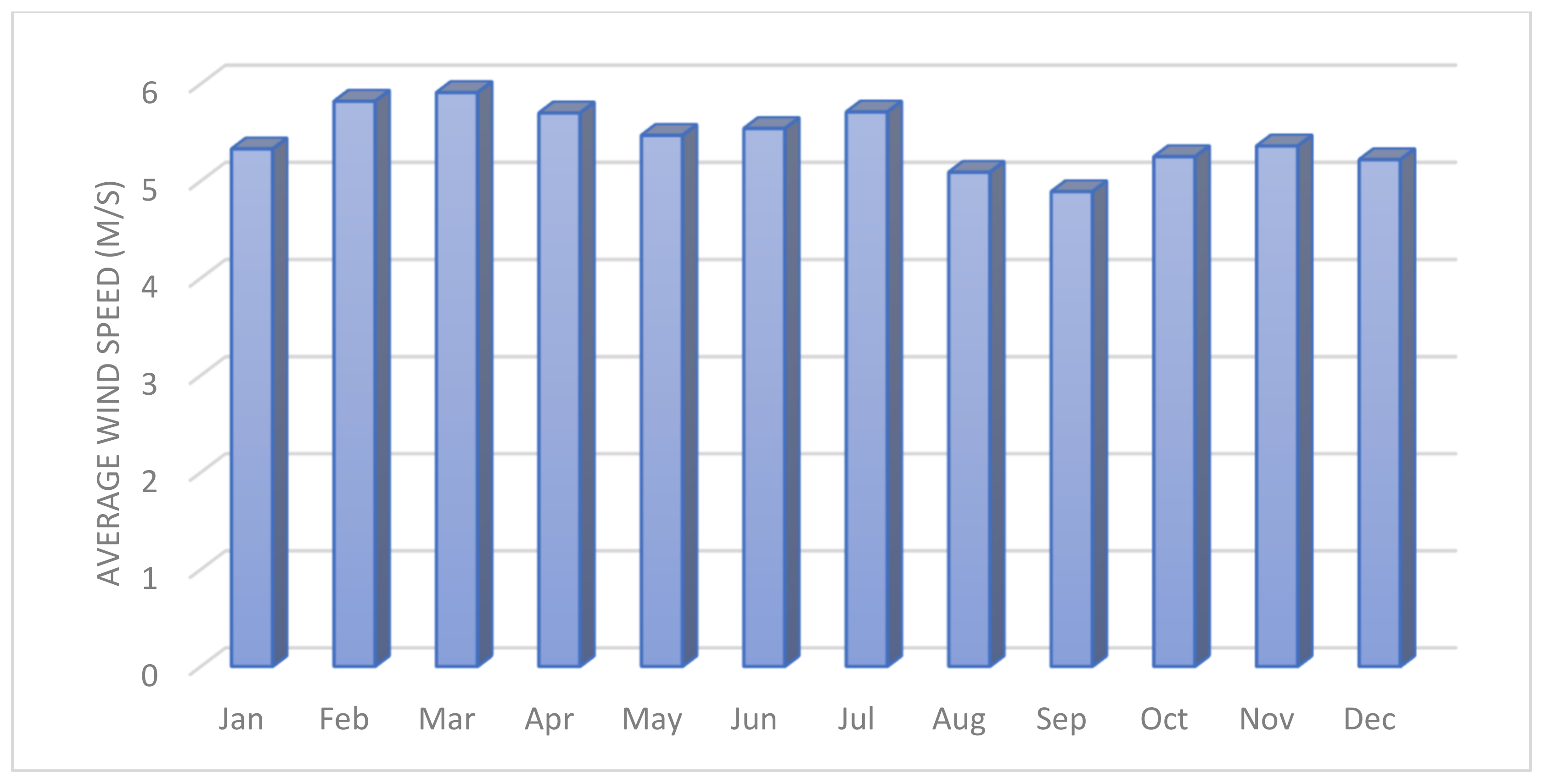
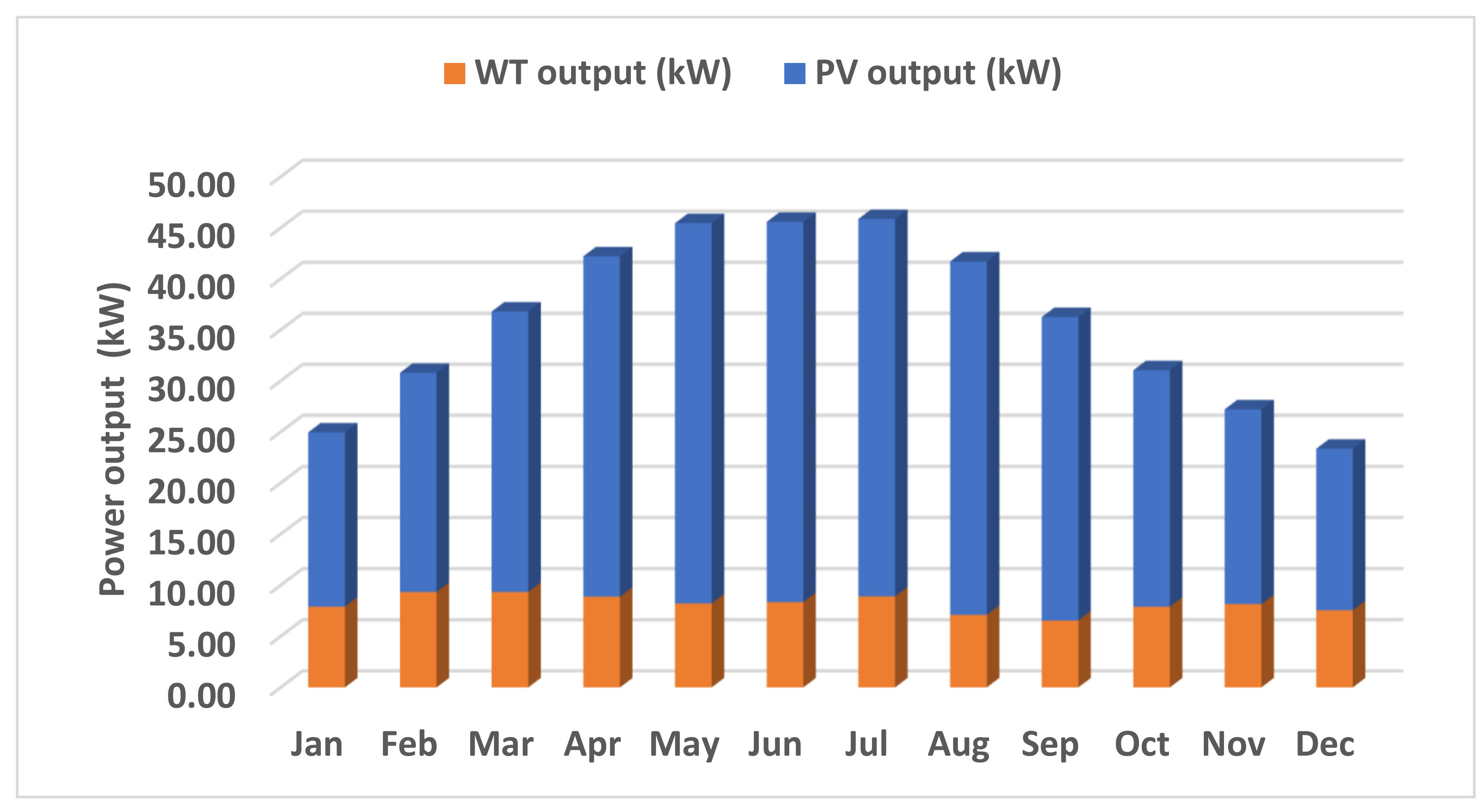
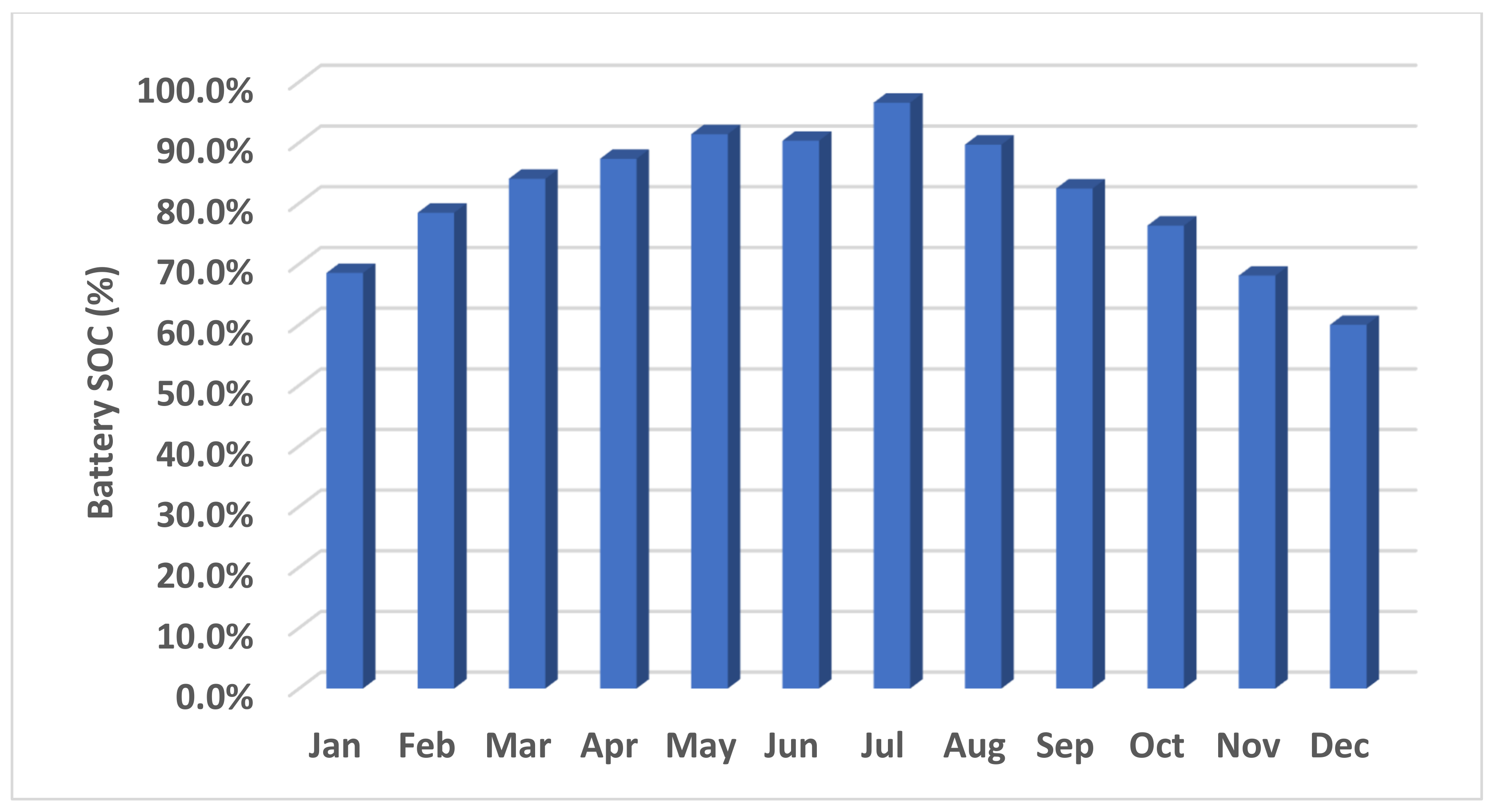
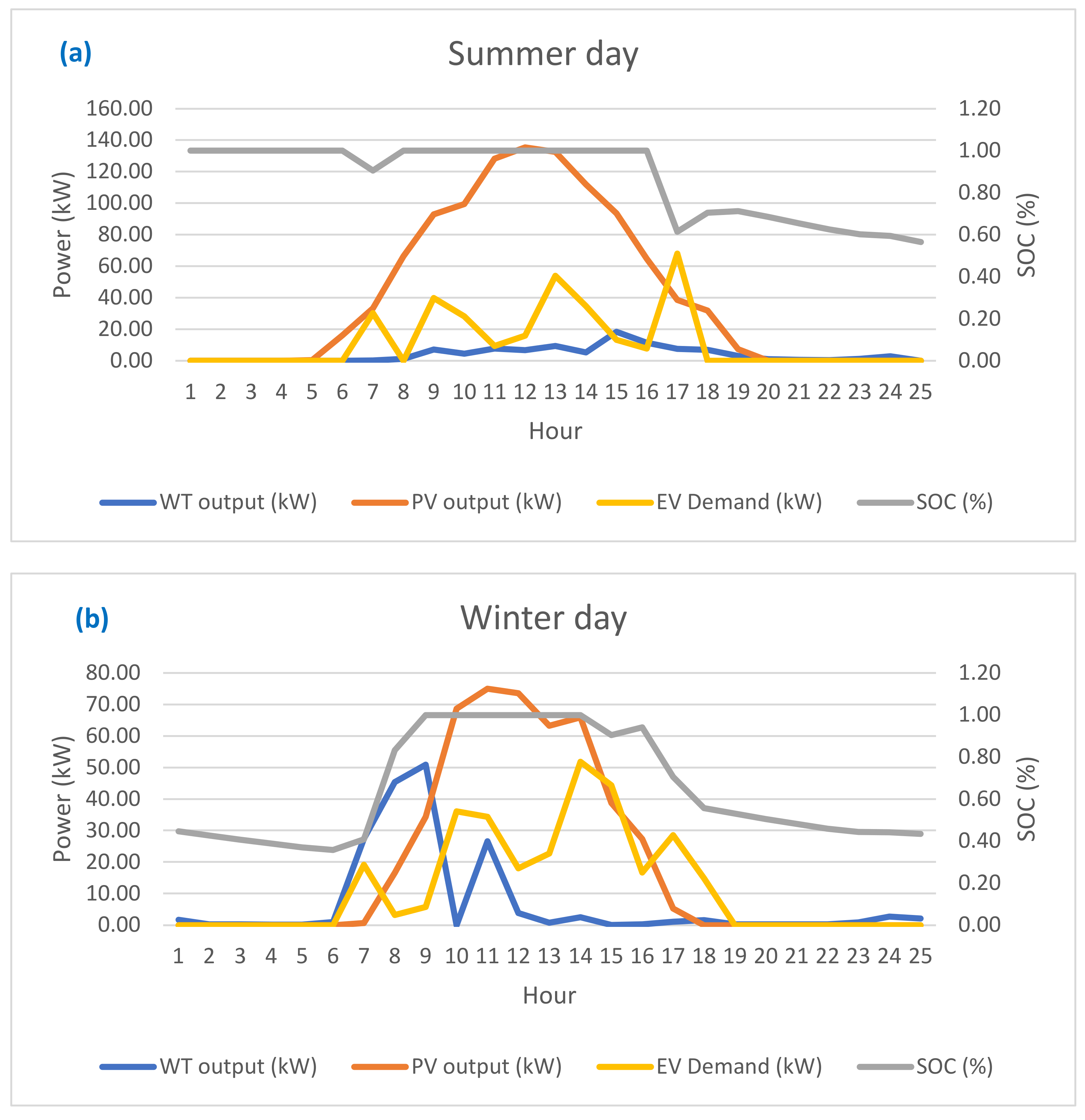
- The proposed system can adjust to different energy requirements in different seasons, showcasing its ability to function effectively under diverse weather conditions.
- ➣
- The study concludes that the development of a hybrid renewable energy system can provide a reliable source of sustainable electricity for institutions and neighboring communities.
- ➣
- The findings have implications for designing and implementing sustainable renewable energy systems that consider seasonal variations in energy production and consumption.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| PV Output Power | ABC | Artificial Bee Colony | |
| PV Rated Power | CRF | Capital Recovery Factor. | |
| G | Global Irradiance Incident on Titled Plane | DOD | Depth of Discharge. |
| PV Derating Factor | DRP | Demand Response Participation | |
| PV Degradation Factor | EVCS | Electric Vehicle Charging Stations | |
| Shading Factor | EVs | Electric Vehicles | |
| The number of PV system. | GHG | Greenhouse Gas | |
| Ambient Temperature | HOMER | Hybrid Optimization of Multiple Energy Resources | |
| Base Temperature | HPS | Hybrid Power Systems | |
| The number of wind turbines | LCOE | levelized Cost of Energy | |
| The wind turbine efficiency | LPSP | Loss of Power Supply Probability | |
| The rated power of the wind turbine (kW). | LSA | Lightning Search Algorithm | |
| V(t) | The upgraded wind speed in (m/s) | MOEA/D | Multi-Objective Evolutionary Algorithm Based on Decomposition |
| Vci | The cut-in wind speed in (m/s) | MOPSO | Multi-Objective Particle Swarm Optimization |
| Vco | The cut-out wind speed in (m/s) | NOCT | Normal Operating Cell Temperature |
| Vr | The rated wind speed (m/s) | NSGA-II | Non-dominated Sorting Genetic Algorithm |
| Battery bank nominal capacity (kWh). | NSGA-III | Non-dominated Sorting Genetic Algorithm III | |
| Minimum allowable storage battery capacity. | POWER | NASA Prediction of Worldwide Energy Resource database | |
| Maximum allowable storage battery capacity. | PSO | Particle Swarm Optimization | |
| Nbat | The number of battery banks. | PV | Photovoltaic |
| The initial capital cost. | PV-BESS | Photovoltaic-Battery Energy Storage Systems | |
| The replacement costs of the components | PVWB/EVCS | Photovoltaic-Wind Turbine-Battery/Electric Vehicle Charging Station | |
| Operating and Maintenance Costs | RES | Renewable Energy Sources | |
| Ir | Interest rate. | RF | Renewable Fraction |
| If | Inflation rate. | SDGs | Sustainable Development Goals |
| The primary load served (kWh/year). | TNPC | Total Net Present Cost | |
| The Battery Self-Discharge | TNPC | Total Net Present Cost | |
| The Battery efficiency | V2G | Vehicle-to-Grid | |
| The EVCS load | VCS | Virus Colony Search Optimization | |
| S | Salvage value | WT | Wind Turbines |
References
- Brenna, M.; Foiadelli, F.; Leone, C.; Longo, M. Electric vehicles charging technology review and optimal size estimation. J. Electr. Eng. Technol. 2020, 15, 2539–2552. [Google Scholar] [CrossRef]
- Mishra, S.; Verma, S.; Chowdhury, S.; Gaur, A.; Mohapatra, S.; Dwivedi, G.; Verma, P. A comprehensive review on developments in electric vehicle charging station infrastructure and present scenario of India. Sustainability 2021, 13, 2396. [Google Scholar] [CrossRef]
- Chavhan, S.; Zeebaree, S.R.M.; Alkhayyat, A.; Kumar, S. Design of Space Efficient Electric Vehicle Charging Infrastructure Integration Impact on Power Grid Network. Mathematics 2022, 10, 3450. [Google Scholar] [CrossRef]
- Balmelli, S.; Moresino, F. Coordination of Plug-In Electric Vehicle Charging in a Stochastic Framework: A Decentralized Tax/Incentive-Based Mechanism to Reach Global Optimality. Mathematics 2023, 11, 999. [Google Scholar] [CrossRef]
- Ullah, Z.; Wang, S.; Wu, G.; Hasanien, H.M.; Rehman, A.U.; Turky, R.A.; Elkadeem, M.R. Optimal scheduling and techno-economic analysis of electric vehicles by implementing solar-based grid-tied charging station. Energy 2023, 267, 126560. [Google Scholar] [CrossRef]
- Bhatt, A.; Ongsakul, W.; Madhu, N.M. Optimal techno-economic feasibility study of net-zero carbon emission microgrid integrating second-life battery energy storage system. Energy Convers. Manag. 2022, 266, 115825. [Google Scholar] [CrossRef]
- Farhoodnea, M.; Mohamed, A.; Shareef, H.; Zayandehroodi, H. Power quality impacts of high-penetration electric vehicle stations and renewable energy-based generators on power distribution systems. Measurement 2013, 46, 2423–2434. [Google Scholar] [CrossRef]
- Al-Shetwi, A.Q.; Hannan, M.A.; Jern, K.P.; Alkahtani, A.A.; PG Abas, A.E. Power quality assessment of grid-connected PV system in compliance with the recent integration requirements. Electronics 2020, 9, 366. [Google Scholar] [CrossRef] [Green Version]
- Solanke, T.U.; Ramachandaramurthy, V.K.; Yong, J.Y.; Pasupuleti, J.; Kasinathan, P.; Rajagopalan, A. A review of strategic charging–discharging control of grid-connected electric vehicles. J. Energy Storage 2020, 28, 101193. [Google Scholar] [CrossRef]
- Divyapriya, S.; Vijayakumar, R. Design of residential plug-in electric vehicle charging station with time of use tariff and IoT technology. In Proceedings of the 2018 International Conference on Soft-computing and Network Security (ICSNS), Coimbatore, India, 14–16 February 2018; pp. 1–5. [Google Scholar]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed power system virtual inertia implemented by grid-connected power converters. IEEE Trans. Power Electron. 2017, 33, 8488–8499. [Google Scholar] [CrossRef] [Green Version]
- Al-Shetwi, A.Q.; Issa, W.K.; Aqeil, R.F.; Ustun, T.S.; Al-Masri, H.M.K.; Alzaareer, K.; Abdolrasol, M.G.M.; Abdullah, M.A. Active Power Control to Mitigate Frequency Deviations in Large-Scale Grid-Connected PV System Using Grid-Forming Single-Stage Inverters. Energies 2022, 15, 2035. [Google Scholar] [CrossRef]
- Narasipuram, R.P.; Mopidevi, S. A technological overview & design considerations for developing electric vehicle charging stations. J. Energy Storage 2021, 43, 103225. [Google Scholar]
- Singh, S.; Chauhan, P.; Singh, N.J. Feasibility of grid-connected solar-wind hybrid system with electric vehicle charging station. J. Mod. Power Syst. Clean Energy 2020, 9, 295–306. [Google Scholar] [CrossRef]
- Shaukat, N.; Khan, B.; Ali, S.M.; Mehmood, C.A.; Khan, J.; Farid, U.; Majid, M.; Anwar, S.M.; Jawad, M.; Ullah, Z. A survey on electric vehicle transportation within smart grid system. Renew. Sustain. Energy Rev. 2018, 81, 1329–1349. [Google Scholar] [CrossRef]
- Samy, M.M.; Elkhouly, H.I.; Barakat, S. Multi-objective optimization of hybrid renewable energy system based on biomass and fuel cells. Int. J. Energy Res. 2021, 45, 8214–8230. [Google Scholar] [CrossRef]
- Samy, M.M.; Mosaad, M.I.; Barakat, S. Optimal economic study of hybrid PV-wind-fuel cell system integrated to unreliable electric utility using hybrid search optimization technique. Int. J. Hydrogen Energy 2021, 46, 11217–11231. [Google Scholar] [CrossRef]
- Samy, M.M.; Almamlook, R.E.; Elkhouly, H.I.; Barakat, S. Decision-Making and Optimal Design of Green E nergy System Based on Statistical Methods and Artificial Neural Network Approaches. Sustain. Cities Soc. 2022, 84, 104015. [Google Scholar] [CrossRef]
- Samy, M.M.; Barakat, S.; Ramadan, H.S. A flower pollination optimization algorithm for an off-grid PV-Fuel cell hybrid renewable system. Int. J. Hydrogen Energy 2019, 44, 2141–2152. [Google Scholar] [CrossRef]
- Deb, K.; Deb, K. Multi-objective optimization. In Search Methodologies: Introductory Tutorials in Optimization and Decision Support Techniques; Springer: Berlin/Heidelberg, Germany, 2013; pp. 403–449. [Google Scholar]
- Coello, C.A.C. Treating constraints as objectives for single-objective evolutionary optimization. Eng. Optim. A35 2000, 32, 275–308. [Google Scholar] [CrossRef]
- Taboada, H.A.; Baheranwala, F.; Coit, D.W.; Wattanapongsakorn, N. Practical solutions for multi-objective optimization: An application to system reliability design problems. Reliab. Eng. Syst. Saf. 2007, 92, 314–322. [Google Scholar] [CrossRef]
- Konak, A.; Coit, D.W.; Smith, A.E. Multi-objective optimization using genetic algorithms: A tutorial. Reliab. Eng. Syst. Saf. 2006, 91, 992–1007. [Google Scholar] [CrossRef]
- Abbass, H.A.; Sarker, R.; Newton, C. PDE: A Pareto-frontier differential evolution approach for multi-objective optimization problems. In Proceedings of the 2001 Congress on Evolutionary Computation (IEEE Cat. No. 01TH8546), Seoul, Republic of Korea, 27–30 May 2001; Volume 2, pp. 971–978. [Google Scholar]
- Ngatchou, P.; Zarei, A.; El-Sharkawi, A. Pareto multi objective optimization. In Proceedings of the 13th International Conference on Intelligent Systems Application to Power Systems, Arlington, VA, USA, 6–10 November 2005; pp. 84–91. [Google Scholar]
- Ball, M.O. Heuristics based on mathematical programming. Surv. Oper. Res. Manag. Sci. 2011, 16, 21–38. [Google Scholar] [CrossRef]
- Marler, R.T.; Arora, J.S. The weighted sum method for multi-objective optimization: New insights. Struct. Multidiscip. Optim. 2010, 41, 853–862. [Google Scholar] [CrossRef]
- Mavrotas, G. Effective implementation of the ε-constraint method in multi-objective mathematical programming problems. Appl. Math. Comput. 2009, 213, 455–465. [Google Scholar] [CrossRef]
- Tamiz, M.; Jones, D.; Romero, C. Goal programming for decision making: An overview of the current state-of-the-art. Eur. J. Oper. Res. 1998, 111, 569–581. [Google Scholar] [CrossRef]
- Chiong, R. Nature-Inspired Algorithms for Optimisation; Springer: Berlin/Heidelberg, Germany, 2009; Volume 193. [Google Scholar]
- Jansen, T. Analyzing Evolutionary Algorithms: The Computer Science Perspective; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Forrest, S. Genetic algorithms. ACM Comput. Surv. 1996, 28, 77–80. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, Australia, 27 November 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Feoktistov, V. Differential Evolution; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Price, K.V. Differential evolution. Handbook of Optimization: From Classical to Modern Approach; Springer: Berlin/Heidelberg, Germany, 2013; pp. 187–214. [Google Scholar]
- Coello, C.A.C.; Lamont, G.B. Applications of Multi-Objective Evolutionary Algorithms; World Scientific: Singapore, 2004; Volume 1. [Google Scholar]
- Deb, K. Multi-objective evolutionary algorithms. In Springer Handbook of Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2015; pp. 995–1015. [Google Scholar]
- Marcelino, C.G.; Leite, G.M.C.; Delgado, C.A.D.M.; de Oliveira, L.B.; Wanner, E.F.; Jiménez-Fernández, S.; Salcedo-Sanz, S. An efficient multi-objective evolutionary approach for solving the operation of multi-reservoir system scheduling in hydro-power plants. Expert Syst. Appl. 2021, 185, 115638. [Google Scholar] [CrossRef]
- Lin, Q.; Liu, S.; Zhu, Q.; Tang, C.; Song, R.; Chen, J.; Coello, C.A.C.; Wong, K.-C.; Zhang, J. Particle swarm optimization with a balanceable fitness estimation for many-objective optimization problems. IEEE Trans. Evol. Comput. 2016, 22, 32–46. [Google Scholar] [CrossRef]
- Coello, C.A.C.; Lechuga, M.S. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the 2002 Congress on Evolutionary Computation, CEC’02 (Cat. No. 02TH8600), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1051–1056. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Ishibuchi, H.; Imada, R.; Setoguchi, Y.; Nojima, Y. Performance comparison of NSGA-II and NSGA-III on various many-objective test problems. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 3045–3052. [Google Scholar]
- Zhang, Q.; Li, H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Boddapati, V.; Kumar, A.R.; Daniel, S.A.; Padmanaban, S. Design and prospective assessment of a hybrid energy-based electric vehicle charging station. Sustain. Energy Technol. Assess. 2022, 53, 102389. [Google Scholar] [CrossRef]
- Karmaker, A.K.; Ahmed, M.R.; Hossain, M.A.; Sikder, M.M. Feasibility assessment & design of hybrid renewable energy based electric vehicle charging station in Bangladesh. Sustain. Cities Soc. 2018, 39, 189–202. [Google Scholar]
- Bastida-Molina, P.; Hurtado-Pérez, E.; Gómez, M.C.M.; Vargas-Salgado, C. Multicriteria power generation planning and experimental verification of hybrid renewable energy systems for fast electric vehicle charging stations. Renew. Energy 2021, 179, 737–755. [Google Scholar] [CrossRef]
- Rahman, M.M.; Al-Ammar, E.A.; Das, H.S.; Ko, W. Optimal design of grid connected pv battery system for probabilistic EVCS load. In Proceedings of the 2020 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 4 February–9 April 2020; pp. 8–13. [Google Scholar] [CrossRef]
- Verma, A.; Singh, B. CAPSA Based Control for Power Quality Correction in PV Array Integrated EVCS Operating in Standalone and Grid Connected Modes. IEEE Trans. Ind. Appl. 2021, 57, 1789–1800. [Google Scholar] [CrossRef]
- Bilal, M.; Alsaidan, I.; Alaraj, M.; Almasoudi, F.M.; Rizwan, M. Techno-Economic and Environmental Analysis of Grid-Connected Electric Vehicle Charging Station Using AI-Based Algorithm. Mathematics 2022, 10, 924. [Google Scholar] [CrossRef]
- Araújo, D.N.; Araújo, A.P.V.G.; Vasconcelos, A.; Castro, J.; Júnior, W.D.A.S.; Medeiros, L.; Conceição, J. Optimum Design of On-Grid PV-BESS for Fast Electric Vehicle Charging Station in Brazil Optimum Design of On-Grid PV-BESS for Fast Electric Vehicle Charging Station in Brazil. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference-Latin America (ISGT Latin America), Lima, Peru, 15–17 September 2021. [Google Scholar]
- Enescu, F.M.; Birleanu, F.G.; Raboaca, M.S.; Raceanu, M.; Bizon, N.; Thounthong, P. Electric Vehicle Charging Station Based on Photovoltaic Energy with or without the Support of a Fuel Cell—Electrolyzer Unit. Energies 2023, 16, 762. [Google Scholar] [CrossRef]
- Kothandaraman Raghavan, A. PV Enabled Net Zero EV Charging Station: System Design and Simulation Study. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2018. [Google Scholar]
- Cazzato, F.; Di Clerico, M.; Falvo, M.C.; Ferrero, S.; Vivian, M. New Dispatching Paradigm in Power Systems Including EV Charging Stations and Dispersed Generation: A Real Test Case. Energies 2020, 13, 944. [Google Scholar] [CrossRef] [Green Version]
- Ye, B.; Jiang, J.; Miao, L.; Yang, P.; Li, J.; Shen, B. Feasibility study of a solar-powered electric vehicle charging station model. Energies 2015, 8, 13265–13283. [Google Scholar] [CrossRef] [Green Version]
- Al Wahedi, A.; Bicer, Y. Techno-economic optimization of novel stand-alone renewables-based electric vehicle charging stations in Qatar. Energy 2022, 243, 123008. [Google Scholar] [CrossRef]
- Al-Buraiki, A.S.; Al-Sharafi, A. Technoeconomic analysis and optimization of hybrid solar/wind/battery systems for a standalone house integrated with electric vehicle in Saudi Arabia. Energy Convers. Manag. 2021, 250, 114899. [Google Scholar] [CrossRef]
- El-Bayeh, C.Z.; Zellagui, M.; Shirzadi, N.; Eicker, U. A novel optimization algorithm for solar panels selection towards a self-powered EV parking lot and its impact on the distribution system. Energies 2021, 14, 4515. [Google Scholar] [CrossRef]
- Hao, D.; Ren, X.; Mohammed, A.S. Optimal Design of Electric Vehicle Parking Lot based on Energy Management Considering Hydrogen Storage System and Demand Side Management. J. Energy Storage 2021, 42, 103045. [Google Scholar] [CrossRef]
- Ghadi-Sahebi, M.; Ebrahimi, R.; Parvin-darabad, V. Optimal probabilistic operation management of smart parking lot and renewable sources in microgrid to reduce cost and improve system reliability considering demand response program. Int. Trans. Electr. Energy Syst. 2021, 31, e13108. [Google Scholar] [CrossRef]
- Goli, P.; Shireen, W. PV powered smart charging station for PHEVs. Renew. Energy 2014, 66, 280–287. [Google Scholar] [CrossRef]
- Kabli, M.; Quddus, M.A.; Nurre, S.G.; Marufuzzaman, M.; Usher, J.M. A stochastic programming approach for electric vehicle charging station expansion plans. Int. J. Prod. Econ. 2020, 220, 107461. [Google Scholar] [CrossRef]
- Li, Y.; Su, S.; Liu, B.; Yamashita, K.; Li, Y.; Du, L. Trajectory-driven planning of electric taxi charging stations based on cumulative prospect theory. Sustain. Cities Soc. 2022, 86, 104125. [Google Scholar] [CrossRef]
- Vuarnoz, D.; Jusselme, T. Neutral global warming potential target of electricity storage as threshold for greenhouse gas emission mitigation in buildings. In Proceedings of the PLEA 2018—Smart and Healthy Within the Two-Degree Limit, 34th International Conference on Passive and Low Energy Architecture, Hong Kong, China, 10–12 December 2018; Volume 1, pp. 68–73. [Google Scholar]
- Carlstedt, D.; Asp, L.E. Performance analysis framework for structural battery composites in electric vehicles. Compos. Part B Eng. 2020, 186, 107822. [Google Scholar] [CrossRef]
- Arvizu, D.; Balaya, P.; Cabeza, L.F.; Hollands, T.; Jäger-Waldau, A.; Kondo, M.; Konseibo, C.; Meleshko, V.; Stein, W.; Tamaura, Y.; et al. Direct Solar Energy. In IPCC Special Report on Renewable Energy Sources and Climate Change Mitigation; Cambridge University Press: Cambridge, UK, 2011; pp. 333–400. [Google Scholar]
- Duffie, J.A.; Beckman, W.A. Solar Engineering of Thermal Processes; Wiley: New York, NY, USA, 2013; Volume 3. [Google Scholar]
- Wiser, R.; Yang, Z.; Hand, M.; Hohmeyer, O.; Infield, D.; Jensen, P.H.; Nikolaev, V.; O’Malley, M.; Sinden, G.; Zervos, A. Wind energy. In IPCC Special Report on Renewable Energy Sources and Climate Change Mitigation; Cambridge University Press: Cambridge, UK, 2011; pp. 535–608. [Google Scholar]
- Hakimi, S.M.; Tafreshi, S.M.M.; Kashefi, A. Unit sizing of a stand-alone hybrid power system using particle swarm optimization (PSO). In Proceedings of the Automation and logistics, 2007 IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 3107–3112. [Google Scholar]
- Malheiro, A.; Castro, P.M.; Lima, R.M.; Estanqueiro, A. Integrated sizing and scheduling of wind/PV/diesel/battery isolated systems. Renew. Energy 2015, 83, 646–657. [Google Scholar] [CrossRef] [Green Version]
- Wu, K.; Zhou, H.; An, S.; Huang, T. Optimal coordinate operation control for wind--photovoltaic--battery storage power-generation units. Energy Convers. Manag. 2015, 90, 466–475. [Google Scholar] [CrossRef]
- Amrouche, S.O.; Rekioua, D.; Rekioua, T.; Bacha, S. Overview of energy storage in renewable energy systems. Int. J. Hydrogen Energy 2016, 41, 20914–20927. [Google Scholar] [CrossRef]
- Diaf, S.; Diaf, D.; Belhamel, M.; Haddadi, M.; Louche, A. A methodology for optimal sizing of autonomous hybrid PV/wind system. Energy Policy 2007, 35, 5708–5718. [Google Scholar] [CrossRef] [Green Version]
- Samy, M.M.; Emam, A.; Tag-Eldin, E.; Barakat, S. Exploring energy storage methods for grid-connected clean power plants in case of repetitive outages. J. Energy Storage 2022, 54, 105307. [Google Scholar] [CrossRef]
- Barakat, S.; Samy, M.M. A Hybrid Photovoltaic/Wind Green Energy System for Outpatient Clinic Utilizing Fuel Cells and Different Batteries as a Storage Devices. In Proceedings of the 2022 23rd International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 13–15 December 2022; pp. 1–6. [Google Scholar]
- Barakat, S.; Emam, A.; Samy, M.M. Investigating grid-connected green power systems’ energy storage solutions in the event of frequent blackouts. Energy Rep. 2022, 8, 5177. [Google Scholar] [CrossRef]
- Samy, M.M.; Mossad, M.I.; El-Naggar, M.F.; Barakat, S. Reliability Support of Undependable Grid Using Green Energy Systems; Economic Study. IEEE Access 2021, 9, 14528–14539. [Google Scholar] [CrossRef]
- Javed, M.S.; Song, A.; Ma, T. Techno-economic assessment of a stand-alone hybrid solar-wind-battery system for a remote island using genetic algorithm. Energy 2019, 176, 704–717. [Google Scholar] [CrossRef]
- Mostaghim, S.; Teich, J. Strategies for finding good local guides in multi-objective particle swarm optimization (MOPSO). In Proceedings of the 2003 IEEE Swarm Intelligence Symposium, SIS’03 (Cat. No. 03EX706), Indianapolis, IN, USA, 26 April 2003; pp. 26–33. [Google Scholar]
- Kumar, V.; Minz, S. Multi-objective particle swarm optimization: An introduction. SmartCR 2014, 4, 335–353. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: NSGA-II. In Parallel Problem Solving from Nature PPSN VI, Proceedings of the 6th International Conference, Paris, France, 18–20 September 2000; Proceedings 6; Springer: Berlin/Heidelberg, Germany, 2000; pp. 849–858. [Google Scholar]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. IEEE Trans. Evol. Comput. 2013, 18, 577–601. [Google Scholar] [CrossRef]
- Santos, T.; Xavier, S. A convergence indicator for multi-objective optimisation algorithms. TEMA 2018, 19, 437–448. [Google Scholar] [CrossRef] [Green Version]
- Khare, V.; Yao, X.; Deb, K. Performance scaling of multi-objective evolutionary algorithms. In Evolutionary Multi-Criterion Optimization, Proccedings of the Second International Conference, EMO 2003, Faro, Portugal, 8–11 April 2003; Proceedings 2; Springer: Berlin/Heidelberg, Germany, 2003; pp. 376–390. [Google Scholar]
- Riquelme, N.; Von Lücken, C.; Baran, B. Performance metrics in multi-objective optimization. In Proceedings of the 2015 Latin American Computing Conference (CLEI), Arequipa, Peru, 19–23 October 2015; pp. 1–11. [Google Scholar]
- Pal, M.; Bandyopadhyay, S. Reliability of convergence metric and hypervolume indicator for many-objective optimization. In Proceedings of the 2016 2nd International Conference on Control, Instrumentation, Energy & Communication (CIEC), Kolkata, India, 28–30 January 2016; pp. 511–515. [Google Scholar]
- Zitzler, E.; Brockhoff, D.; Thiele, L. The hypervolume indicator revisited: On the design of Pareto-compliant indicators via weighted integration. In Evolutionary Multi-Criterion Optimization, Proceedings of the 4th International Conference, EMO 2007, Matsushima, Japan, March 5–8 2007; Proceedings 4; Springer: Berlin/Heidelberg, Germany, 2007; pp. 862–876. [Google Scholar]
- Mostaghim, S.; Teich, J. A New Approach on Many Objective Diversity Measurement; Schloss Dagstuhl-Leibniz-Zentrum für Informatik: Wadern, Germany, 2005. [Google Scholar]
- He, Z.; Yen, G.G. Many-objective evolutionary algorithm: Objective space reduction and diversity improvement. IEEE Trans. Evol. Comput. 2015, 20, 145–160. [Google Scholar] [CrossRef]
- Bertsimas, D.; Sim, M. The price of robustness. Oper. Res. 2004, 52, 35–53. [Google Scholar] [CrossRef] [Green Version]
- Ehrgott, M.; Ide, J.; Schöbel, A. Minmax robustness for multi-objective optimization problems. Eur. J. Oper. Res. 2014, 239, 17–31. [Google Scholar] [CrossRef]
- Eker, S.; Kwakkel, J.H. Including robustness considerations in the search phase of Many-Objective Robust Decision Making. Environ. Model. Softw. 2018, 105, 201–216. [Google Scholar] [CrossRef] [Green Version]
- Kasprzyk, J.R.; Nataraj, S.; Reed, P.M.; Lempert, R.J. Many objective robust decision making for complex environmental systems undergoing change. Environ. Model. Softw. 2013, 42, 55–71. [Google Scholar] [CrossRef]
- Shavazipour, B.; Kwakkel, J.H.; Miettinen, K. Multi-scenario multi-objective robust optimization under deep uncertainty: A posteriori approach. Environ. Model. Softw. 2021, 144, 105134. [Google Scholar] [CrossRef]
- Schöbel, A.; Zhou-Kangas, Y. The price of multiobjective robustness: Analyzing solution sets to uncertain multiobjective problems. Eur. J. Oper. Res. 2021, 291, 782–793. [Google Scholar] [CrossRef]
- Martínez-Peñaloza, M.-G.; Mezura-Montes, E.; Morales-Reyes, A.; Aguirre, H.E. Distance-based immune generalised differential evolution algorithm for dynamic multi-objective optimisation. Int. J. Bio-Inspired Comput. 2021, 18, 69–81. [Google Scholar] [CrossRef]
- Stackhouse, P., Jr.; Eckman, R.; Zhang, T.; Mikovitz, J.; Whitlock, C.; Chandler, W.; Hoell, J.; Leng, G.; Lilienthal, P. Supporting energy-related societal applications using NASAs satellite and modeling data. In Proceedings of the 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 31 July–4 August 2006; pp. 425–428. [Google Scholar]
- Boussetta, M.; Bachtiri, R.E.; Khanfara, M.; Hammoumi, K. El Assessing the potential of hybrid PV—Wind systems to cover public facilities loads under different Moroccan climate conditions. Sustain. Energy Technol. Assess. 2020, 22, 74–82. [Google Scholar] [CrossRef]
- Elshurafa, A.M.; Muhsen, A.R.; Felder, F.A. Cost, footprint, and reliability implications of deploying hydrogen in off-grid electric vehicle charging stations: A GIS-assisted study for Riyadh, Saudi Arabia. Int. J. Hydrogen Energy 2022, 47, 32641–32654. [Google Scholar] [CrossRef]
- Li, C.; Shan, Y.; Zhang, L.; Zhang, L.; Fu, R. Techno-economic evaluation of electric vehicle charging stations based on hybrid renewable energy in China. Energy Strateg. Rev. 2022, 41, 100850. [Google Scholar] [CrossRef]
- Praveenkumar, S.; Agyekum, E.B.; Ampah, J.D.; Afrane, S.; Velkin, V.I.; Mehmood, U.; Awosusi, A.A. Techno-economic optimization of PV system for hydrogen production and electric vehicle charging stations under five different climatic conditions in India. Int. J. Hydrogen Energy 2022, 47, 38087–38105. [Google Scholar] [CrossRef]
- Syed Mohammed, A.; Lodhi, A.S.; Murtaza, Q. Techno-economic feasibility of hydrogen based electric vehicle charging station: A case study. Int. J. Energy Res. 2022, 46, 14145–14160. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Battery Capacity (kWh) | Charging Time (min) | Proportion of EV Population (%) | Type of Charging | Battery Technology |
|---|---|---|---|---|---|
| Volkswagen e-Golf | 36 | 40 | 30 | Fast Charge | Lithium-ion |
| Mercedes EQA 250 | 67 | 30 | 30 | ||
| Fiat 500e Hatchback | 24 | 25 | 10 | ||
| BMW i3 | 43 | 40 | 30 |
| 1. MOPSO | |
|---|---|
| population size | 100 |
| Stopping criteria (Max. iteration) | 200 |
| Inertia Weight | 0.85 |
| Inertia Weight Damping Rate | 0.90 |
| Personal Learning Coefficient | 1.8 |
| Global Learning Coefficient | 2 |
| Leader Selection Pressure | 2 |
| Deletion Selection Pressure | 2 |
| Mutation Rate | 0.10 |
| 2. NSGA-II | 3. NSGA-III |
| population size | 100 |
| Stopping criteria (Max. iteration) | 200 |
| Crossover Percentage | 0.70 |
| Number of Parents (Off springs) | 70 |
| Mutation Percentage | 0.40 |
| Number of Mutants | 40 |
| Mutation Rate | 0.02 |
| 4. MOEA/D | |
| population size | 100 |
| Stopping criteria (Max. iteration) | 200 |
| Number of Neighbors | 30 |
| Crossover Percentage | 0.50 |
| Item | Parameter | Value | Unit |
|---|---|---|---|
| Generic flat plate PV [73] | capacity | 1 | kW |
| IC | 1187 | USD | |
| RC | 1187 | USD | |
| O&M | 5 | USD/year | |
| lifetime | 25 | years | |
| Wind turbine (WES 18) [97] | capacity | 80 | kW |
| IC | 84,000 | USD | |
| RC | 52,080 | USD | |
| O&M | 400 | USD/year | |
| lifetime | 20 | years | |
| Lithium Ion (Blue Ion 2.0) [73] | Nominal capacity | 16.8 | kW |
| IC | 15,000 | USD | |
| RC | 13,800 | USD | |
| O&M | 1.0 | USD/year | |
| lifetime | 25 | years | |
| Discount rate | 3 | (%) | |
| Inflation rate | 2.15 | (%) | |
| Project lifetime | 25 | years | |
| PV (Kw) | WT (units) | Battery (units) | LPSP (%) | LCOE (USD/kWh) | TNPC (USD) | |
|---|---|---|---|---|---|---|
| MOEA-D | 223 | 1 | 7 | 1.21 | 0.2521 | 564,846 |
| MOPSO | 224 | 1 | 9 | 0.87 | 0.2654 | 596,662 |
| NSGA-III | 208 | 1 | 11 | 0.76 | 0.2673 | 601,519 |
| NSGA-II | 171 | 2 | 9 | 0.83 | 0.2861 | 643,510 |
| HOMER | 222 | 1 | 22 | 0.00 | 0.319 | 724,004 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshammari, N.F.; Samy, M.M.; Barakat, S. Comprehensive Analysis of Multi-Objective Optimization Algorithms for Sustainable Hybrid Electric Vehicle Charging Systems. Mathematics 2023, 11, 1741. https://doi.org/10.3390/math11071741
Alshammari NF, Samy MM, Barakat S. Comprehensive Analysis of Multi-Objective Optimization Algorithms for Sustainable Hybrid Electric Vehicle Charging Systems. Mathematics. 2023; 11(7):1741. https://doi.org/10.3390/math11071741
Chicago/Turabian StyleAlshammari, Nahar F., Mohamed Mahmoud Samy, and Shimaa Barakat. 2023. "Comprehensive Analysis of Multi-Objective Optimization Algorithms for Sustainable Hybrid Electric Vehicle Charging Systems" Mathematics 11, no. 7: 1741. https://doi.org/10.3390/math11071741