1. Introduction
In order to keep a manufacturing process as lean as possible, there are several aspects that must be considered. The monitoring capability is one of the features receiving the major spotlight in industrial operations since it is crucial to guarantee that the process is safe for the personnel involved. Among the procedures that constitute the monitoring systems, one that is worth mentioning is the fault-detection (FD) process [
1,
2].
A fault can be seen as the first indication of more harsh problems. It is any type of unwanted minor behavior that was not expected from the system. It can be caused, for instance, by extended wear due to long periods of time without maintenance. As a consequence of inadequately fixed wear, malfunctions or failures can cause a breakage [
3].
In this sense, FD is a model-based process in which any abnormal/unexpected behavior is detected by a two-step procedure. The first step in the FD process is the residue generation, performed by an observer. The second step is the evaluation process, where the residue signal, generated by the observer, is treated by an evaluation function and compared with a predetermined threshold. We assume that a fault has occurred if the evaluation function surpasses the threshold; otherwise, we consider that the system is working as intended [
4].
Currently, an important assumption that must be taken into account in FD systems is that the communication between the components is made via semireliable networks, which are associated with occasional packet dropout. These dropouts are caused by different sources as package collision due to high network congestion [
5]. The distinction between a dropout and a fault is an essential aspect of the FD process since it makes easier to locate a fault. A viable way to model a packet dropout in a network is to employ a Markov jump linear system (MJLS) framework. This representation is appropriate to handle systems whose dynamic behavior is subject to random abrupt changes, like those caused by network packet dropouts. In this scenario, a Markov chain (MC) is used to model the jumping between the modes of operation of the system [
6].
In the literature, there are plenty of examples of FD approaches that consider network behavior in their design. For instance, in [
7,
8] linear matrix inequality (LMI)-based constraints are provided to design fault detection filters (FDF) by using the
norm as a performance index. In [
9], the authors have developed an FD approach for underactuated manipulators modeled by MJLS. In [
10], an FD method for networked control systems (NCS) under the assumption of the existence of a variable delay between the signals received by the system components is tackled. In [
11], a fault detection filter under the MJLS formulation was applied to a control moment gyroscope. In [
12], a fault-detection filtering problem is tackled under the Markov switching memristive neural networks. In [
13], an observed-based sliding mode control problem based on the event-triggered protocol under the Markovian jump systems framework was presented. In [
14], a fault-detection filter for discrete time Markov jump Lur’e systems with bounded sector condition. Observing all the above examples, one fundamental premise in the MJLS context is that the Markov chain (MC) is considered to be homogeneous [
15], which means that it does not vary in time. However, since the packet dropout sources (collision, congestion, networked-induced delay) change in time, we consider that a fixed transition probability between the Markovian operation modes does not properly model the network behavior. A way to handle the particularity of a time-varying MC was presented in [
16], where the author has proposed new LMI constraints to evaluate the stability of MJLS governed by a nonhomogeneous MC. A particular case of the proposal presented by [
16], which allows for designing FDF for MJLS systems affected by nonhomogeneous MCs, consists of using a linear parameter varying (LPV)-based representation for the time-varying transition probability matrix [
17,
18]. There are several works in the literature that deal with the problem of control (or filter) synthesis for nonlinear systems by using different approaches. For example, regarding the design of fault-tolerant controllers, there are strategies based on fuzzy systems [
19] capable of modeling system nonlinearities by using Takagi–Sugeno models, so that if the probability of actuator failure is small, the control mode is normal, and if the probability is high, the control is changed to fault-tolerant mode. Another strategy to deal with nonlinearities that can be found in the literature arises in the context of sliding mode control [
20]. In this case, the class of discrete-time nonlinear systems with delays and uncertainties that is considered is the conic type, where the nonlinear terms satisfy the constraint that lies in a known hypersphere with an uncertain center. However, the proposed approach, in addition to considering the loss of packets in the communication network via the Markov chain, deals with the nonlinearity of the systems by using a different strategy from those previously discussed, in which the modes of operation are considered linear but depend on time-varying parameters. Such modeling allows the use of convex optimization methods and LMI-based tools to solve the filtering problem without adding extra levels of complexity.
In view of the above works, the main contribution of the present work are
the proposition of a new design technique of gain-scheduled FDF for MJLS with nonhomogeneous MC, and
the numerical simulation to reinforce the usability of the proposed theoretical solution.
The proposed approach describes the nonhomogeneous MC using linear time-varying parameters to model those variations, assuming that these parameters are known or at least measurable. Another important assumption made is that the probability varies in time arbitrarily. Hence, the probability parameter for the following instant does not depend on present instant k, which grants the ability to disassociate the Lyapunov function in two distinct simplexes. Based on this assumption, we propose the design of a gain-scheduled fault-detection filter where the scheduling parameter implemented is the one that dictates the variation of the MC. One advantage of the proposed approach, when compared with others found in the literature, is that the design conditions assure the system stability for the entire parameter-varying range since the FDF is scheduled in terms of time-varying parameters modeling the network variation. The major novelty of the proposed technique is the higher level of fidelity in the representation of the network influence in the system model. Since FD is a model-based approach, a more accurate representation of the system can lead to better performance in practice.
The paper is organized as follows.
Section 2 and
Section 4 present the necessary theoretical fundamentals.
Section 3 shows how to model the nonhomogeneous Markov Chain by using LPV.
Section 5 introduces the problem formulation and the main contributions.
Section 6 illustrates the feasibility of applying the proposed technique, by means of a numerical simulation, and
Section 7 concludes the paper with some final remarks.
Notation
The real Euclidean space is denoted by where n represents its dimension and a real matrix with n rows and m columns is represented by . The symbol stands for an identity matrix (or, for simplicity, just I, with an appropriate dimension, whenever no confusion arises) and the symbol denotes the transpose of a matrix. The operator is used to express the symmetric sum as in , while the operator represents a diagonal matrix. The symbol • denotes a symmetric block in a partitioned symmetric matrix. The expected value operator is represented by and the conditional expected operator is denoted by . The fundamental probability space is described by . The space is the Hilbert space formed by -measurable random sequences such that .
2. Preliminaries
A generic discrete-time MJLS is given by
where
is for the state vector,
is the exogenous input vector, and
is the output signal. The state-space matrices of system (
1) depend on the index
, which represents a discrete-time Markov chain belonging to a finite set of modes
, whose switching is ruled by a time-varying transition probability matrix
The entries
of
are such that
,
, and
. We recall that whenever the transition matrix is time-invariant, that is,
, the associated Markov chain is said to be homogeneous; otherwise, it is called nonhomogeneous (meaning that the probabilities vary in time) [
15,
21]. It is assumed that
varies within the following interval:
, where
represents lower bound and
denotes the upper bound. Another important assumption is that the upper and lower bounds of the transition probability are known, and the transition probability variation is instantly measurable. Therefore, all the parameters in (
2) may vary in a known range with
. There are several ways to determine the values of the upper (
) and lower (
) bounds of
. Those values can be obtained via mathematical modeling, observation, estimation, simulation, or based on the a priori knowledge of the system, such that the estimate can vary among systems and depends on the type of variation to which the system is subjected.
From the constraints
and
, the transition matrix (
2) can be described by
N polytopic intervals, where
N depends on the number of transition probabilities that are time-varying. From these polytopic intervals, some techniques can be applied to obtain a gain-scheduled FDF.
In order to exemplify these
N polytopic intervals and how to define a time-varying transition matrix by using LPV, let us assume that
and the parameters
and
vary in time; hence, the first row of the transition matrix (
2) can be written as
and from this row, two polytopic intervals (
) are obtained:
The polytopic intervals obey the constraints
and
simultaneously. The following notation will be used to represent a time-varying row of
as in (
3) with the lower and upper bounds as in (
4):
The main novelty in this paper is the usage of the same time-varying parameters that coordinate the nonhomogeneous MC variation as gain-scheduled parameters for the design and implementation of the FDF. This concept will be carefully described in
Section 3.
Although the time variation that affects the probability matrix is generally represented by modeling
as belonging to a polytope, in this paper we choose to use another approach, which describes each time-varying row of
in terms of a linear time-varying parameter vector
belonging to a distinct unit simplex
,
. The definition of the unit simplex is given by
where
m is the number of time-varying rows in the probability matrix. In order to group up all the time-varying parameters of
in a single domain, we perform a Cartesian product of
m simplexes, each one of dimension
, in a single domain called multisimplex, and represent it by
, with the index
N given by
. For ease of notation
represents the space
. In this sense, a given element
is a vector belonging to
and can be decomposed as (
) according to the structure of
. Subsequently, each
,
, is decomposed in the form (
). This approach follows the one adopted in [
22].
Hereafter, the transition probability will be denoted by , where the term represents the time-varying parameter responsible to model the probability of the nonhomogeneous Markov chain at time k.
3. Modeling the Nonhomogeneous Markov Chain by Using the Linear Parameter Varying Approach
We next present the definition of a matrix
, where
i represents the MC mode, and
denotes a generic LPV parameter. It is assumed that
is affinely dependent on the time-varying parameters
, as described below:
The matrix in the affine form (
7) can be interpreted in the following manner: matrix
represents the time-invariant part of the filter dynamics. The remaining matrices
,
denote the time-varying dynamic that depends on the parameters
. To illustrate this particular structure, consider the example presented below, for an MJLS with three operation modes, whose time-varying probability matrix is given by
where elements
,
,
and
vary in a known interval
. Since each uncertain row of
can be represented by a polytopic interval, the representation of the first row is given by
and the second row is
with
,
, and
. On the other hand, the representation of
, in terms of parameter
used in the affine structure, can be done as follows,
where
and
. Although the modeling seems to be different, note that a simple change of variables can recover the multisimplex modeling from the affine representation, since
where
,
,
.
In order to clarify how to write a time-varying matrix in the affine form, consider the following affine matrix as
where
and
. By using the multisimplex formulation,
for
, we recover the representation with
, where
. This procedure can be extended for all matrices throughout this paper. Bearing this in mind, in what follows, whenever we write
for
, we mean a representation, as in (
7), in terms of generic LPV parameters or, equivalently, in terms the multisimplex parameter
.
4. Bounded Real Lemma
The concept of stability for the nonhomogeneous Markov chain is different from its homogeneous counterpart. This discrepancy is caused by the arbitrary variation of the transition probability. Therefore, an upper bound of the
norm can only be obtained if system (
1) under the assumption of
is exponentially stable in the mean square sense with conditioning of type I (ESMS-CI). This concept was first introduced in [
23] and is also presented in [
16]. In this sense, before introducing the main results of this paper, some fundamental definitions are presented next.
Definition 1 ([
16]).
Assuming that system (
1)
is ESMS-CI, and , its norm is given by Next, we present a sufficient condition version of the bounded real lemma adapted from [
16], which allows us to deal with nonhomogeneous MJLS with arbitrarily fast time-varying parameters, where the parameters are modeled by using the multisimplex domain
. For that, it is assumed that the condition
in Proposition 1 in [
16] is satisfied; that is,
for all
and
.
Remark 1. In order to draw the results presented in Lemma 1, it is necessary to consider the assumption that the variation of the probabilities is arbitrarily fast. Under this assumption, there is no need to bound the variation limit.
Lemma 1. System (1) is ESMS-CI and satisfies if there exist symmetric positive definite matrices , such that, for each and for all , the parameter-dependent LMIsare satisfied, where Proof. Here is a sketch of the proof for Lemma 1. Assuming that there exist
such that Equation (
15) holds, we have, from Proposition 1 in [
16], that system (
1) is ESMSC1. Define the cost function as
Observe that
and for some
, where
represent the cost function for
. Considering the Lyapunov function
, one has
where
is presented in Equation (
15). Recalling that
so that
, we have
and some
that
Inequality (
17) yields, as
, that
, showing the desired result. □
5. Problem Formulation and Main Result
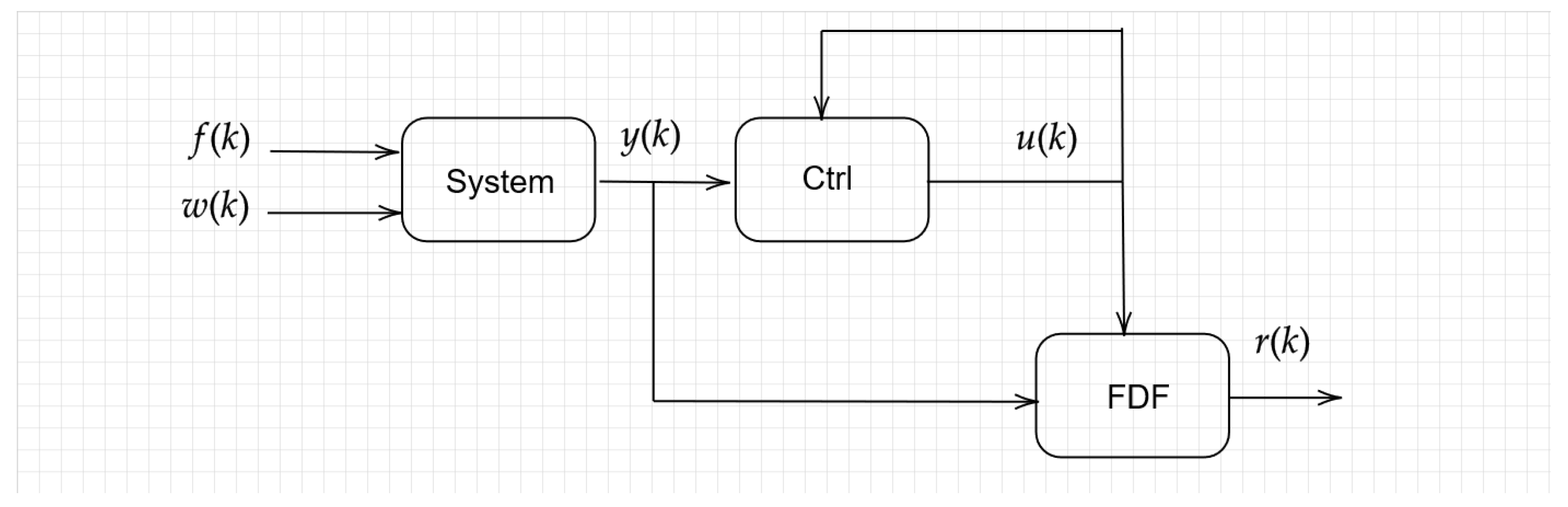
The block diagram of
Figure 1 illustrates the FD scheme considered in this paper. Note that there are three elements composing the diagram: the system itself (
, which represents the plant subjected to a fault), the controller
, and the gain-scheduled FDF block
.
The main purpose of this section is to design the FDF. Consider that the nonhomogeneous MJLS
is defined as
where
denotes the system states vector,
represents the control input,
is the exogenous/noise input,
represents the measurement signals, and
is the fault signal that should be detected. We also assume that
. Finally, when regarding the output-feedback control law, consider the following expression
The controller is assumed to be designed beforehand.
Remark 2. Although the formulation presented in this paper considers an output-feedback control law (19) that is mode-dependent (depends on ) but is parameter-independent (does not depend on or the time-varying probabilities ), the synthesis of the FD filter presented next can be extended to deal with a parameter-dependent control law. Regardless of that, for both situations, it is imperative that the controller is designed a priori. The major implementation difference in the latter case is that the controller would be defined as gain-scheduled. We define the gain-scheduled FDF under the aforementioned conditions as
where
is the filter states,
is the residue signal,
is the control law given by (
19), and
represents the measurement output. The FDF is scheduled in terms of the time-varying parameter
, which represents the variation in time of the MC. Consequently, it is assumed that the time-varying behavior of the MC is known or at least measurable. The purpose of the gain-scheduled FDF in (
20) is to generate a residue signal
, which is used to detect the fault.
Remark 3. All matrices that compose the filter (20) are written in the affine form as in (7), that isand similarly for , , . Recall that the goal of this paper is to design the gain-scheduled FDF (20) where the schedule parameter represents the variation in the nonhomogeneous MC, as explained in Section 3. We define
and the augmented system as
where
, and
. The matrices that compose the augmented system are
In order to provide an FDF (
20), which generates a residue signal
that is robust against noise and associated with a fast response whenever a fault occurs, we set our goal as the synthesis of a proper FD filter by minimizing an upper bound
for the
norm of the augmented system (
22), such that
In the following, we present our main result of the paper, which provides parameter-dependent bilinear matrix inequalities (BMI) for the design of an FDF (
20) for system (
18) with
guaranteed cost. For compactness, hereafter, the dependence on time of parameter
and
is omitted, such that they will be respectively replaced by
and
.
Theorem 1. If there exist, for all , symmetric positive definite parameter-dependent matrices , , , , matrices , , , , , , with appropriate dimensions, and a scalar , such that the BMIs (25) hold for all and , andthen γ is an upper bound for the norm of the augmented system (22), where the matrices that compose the FDF in the form of (20) are given by , , , for all . Proof of Theorem 1. Consider the augmented matrices as from (
23), and define the matrices
and
according to
In addition, we define the matrices
and
as follows:
Consider the following change of variables:
,
. Then we obtain the following identities:
where
Consequently, the BMI (
25) can be rewritten as
By using the projection lemma (see [
24]), (
30) can be rewritten as follows,
where
(Observe that in the remaining of the proof, the time-varying parameter is omitted for notation simplicity, as well as the dependence on , which will be replaced by the superscript index “+”.)
By taking the following basis for the null space of
and
and by applying the equivalence conditions of the projection lemma, we get
Notice that from the first term in (
35) we can state that
. Now, pre- and postmultiplying (
34) by
, where
,
, we obtain
Notice that
represents a block diagonal matrix given by
with
. By using the Schur complement in (
36) and noticing that
we have the condition (
15) satisfied, so that the result follows from the bounded real lemma, presented in Lemma 1, for the nonhomogenous MJLS. □
Remark 4. Observe that the conditions of Theorem 1 constitute of infinite-dimensional problems, which can be solved by using homogeneous polynomial approximations for the optimization variables (LMI relaxations) and then testing the positivity of the polynomial matrix inequalities by means of a finite set of LMIs. For this purpose, the authors strongly recommend the use of the toolbox robust LMI parser (ROLMIP), whose tutorial can be found in [25]. Remark 5. Theorem 1 can be adapted to handle the FDF synthesis problem for homogeneous MJLS with constant or uncertain but time-invariant probability matrix by simply making .
The constraints presented in Theorem 1 are BMIs, which means that is necessary to use appropriate tools in order to solve them. Among a number of techniques available in the literature [
26,
27,
28], we employ the coordinate descend algorithm (CDA), since it is a well-known and widely used tool to solve such issues. Accordingly, an iterative procedure based in CDA is given below to solve Theorem 1.
In Algorithm 1,
represents the stop criteria and
is the maximum number of iterations allowed. Observe that if a solution is found in the first iteration of CDA, the iterative procedure will converge to an optimized solution or at least keep the same solution found in the first iteration. The CDA is better detailed in [
26,
27].
| Algorithm 1 Coordinate descent algorithm. |
Coordinate descent algorithm (CDA):
Input:, , , .
Output:, , , .
Initialization:
While: or do:
Step 1: Find a solution for the LMI constraint (25) obtaining the values of X using as an input , which can be obtained by using any method, for example, the one in Theorem 1 in [7].
Step 2: Now find a solution for the same LMI constraint (25) to obtain , , , , but this time by using X as an input. Also obtain the value of .
|



 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}