
Closed-Loop Continuous-Time Subspace Identification with Prior Information

Abstract
:1. Introduction
2. Preliminaries
3. System Transformation
4. Closed-Loop Subspace Identification
4.1. Derivation of Input–Output Algebraic Equation
4.2. Consistent Estimation via Principal Component Analysis
4.3. Constrained-Least-Squares Approach
4.3.1. Known Steady-State Gain
4.3.2. Zero Transfer Functions
4.4. Summary of Subspace System Identification Algorithm
5. Numerical Simulation
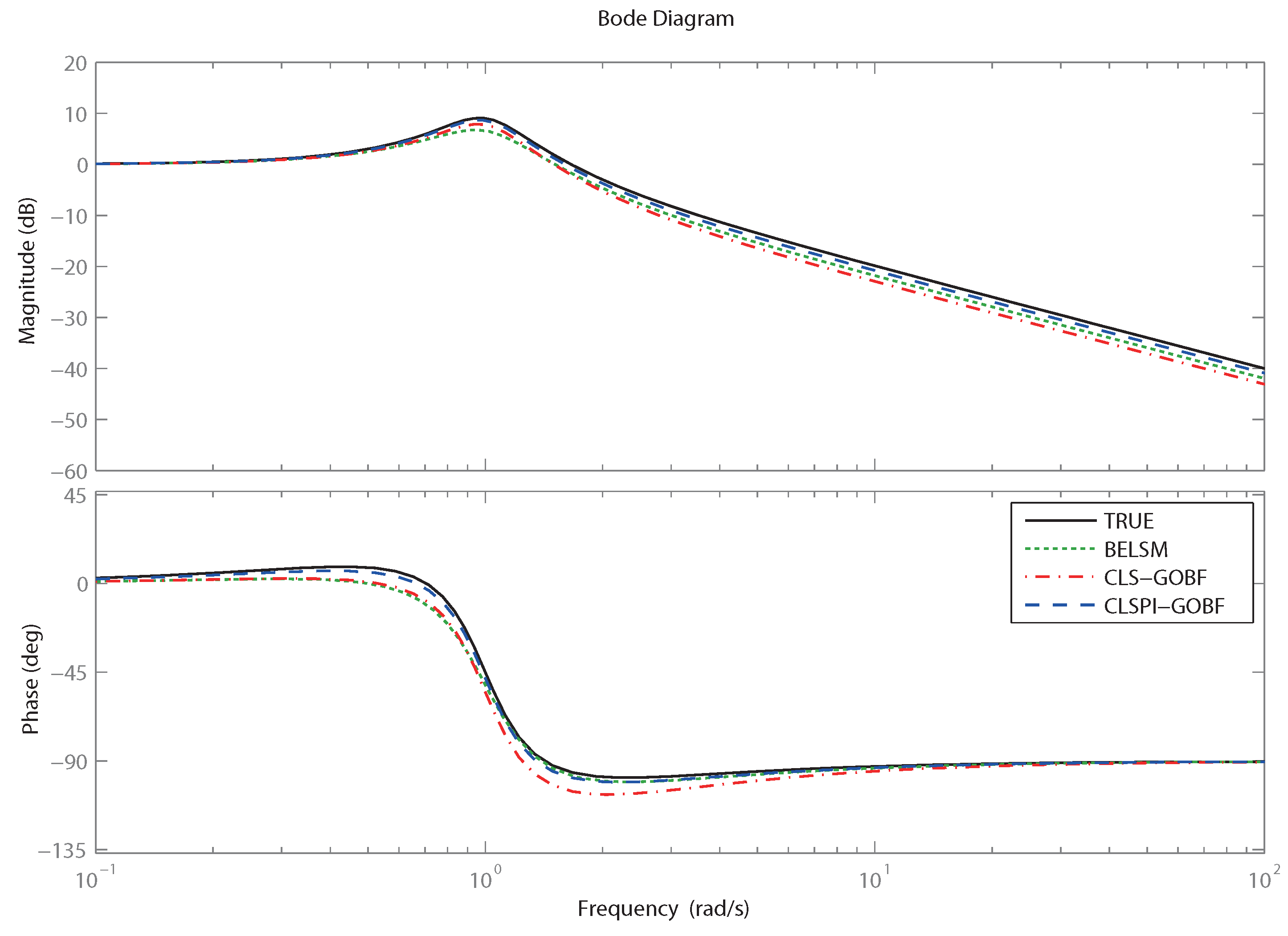
5.1. Example 1: Known Steady-State Gain
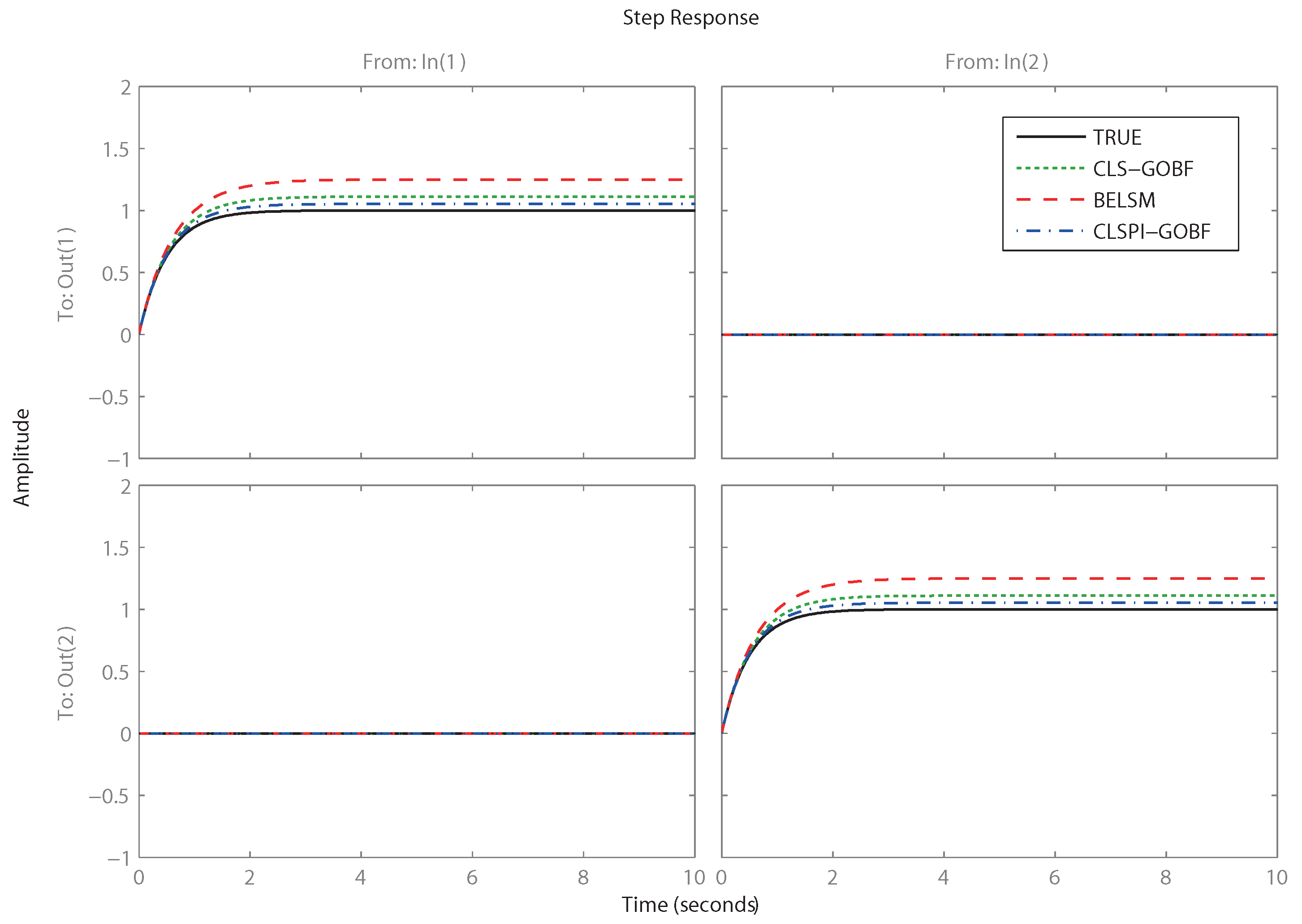
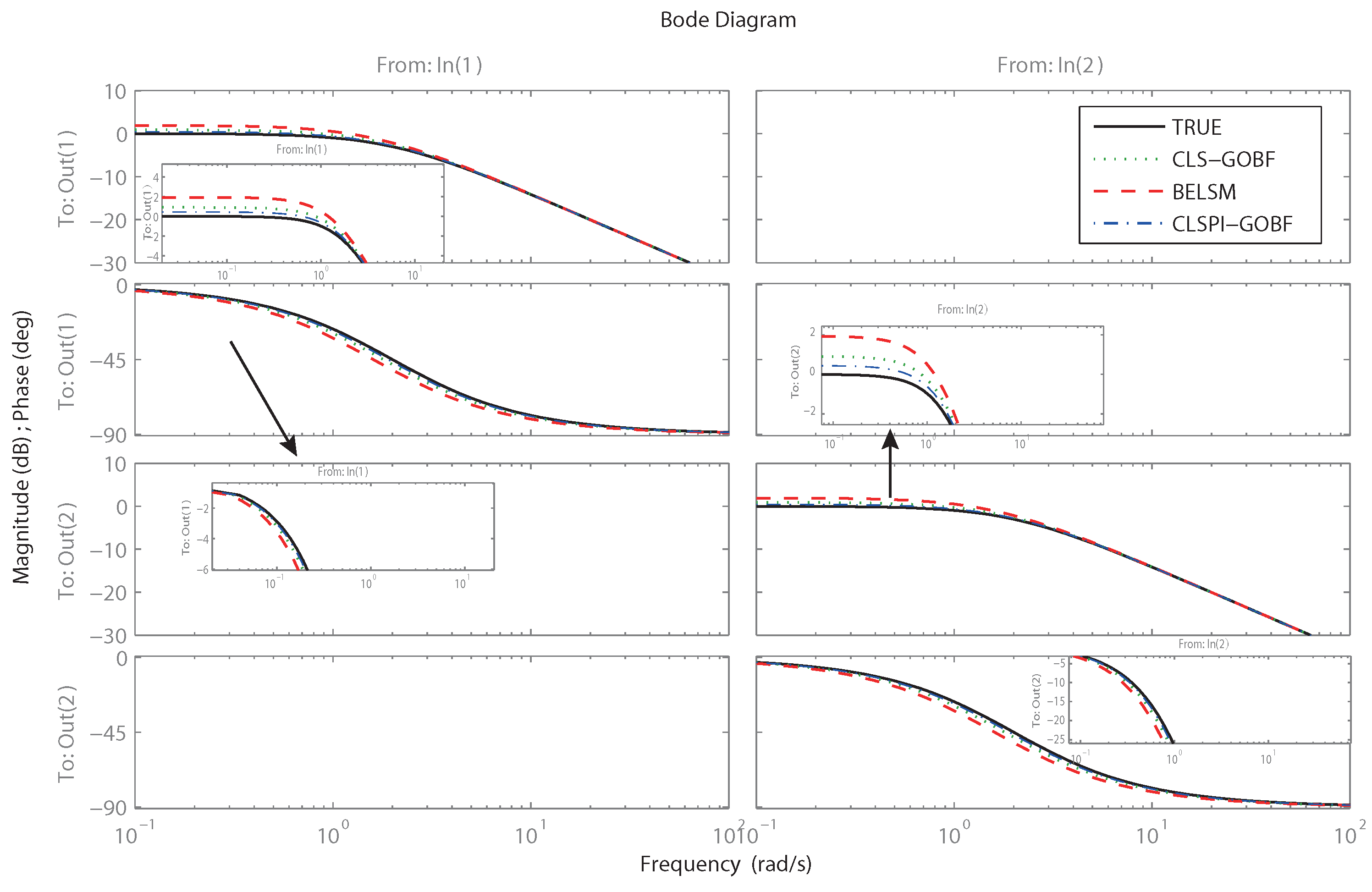
5.2. Example 2: Zero Transfer Functions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, C. A combined invariant-subspace and subspace identification method for continuous-time state-space models using slowly sampled multi-sine-wave data. Automatica 2022, 140, 110261. [Google Scholar] [CrossRef]
- Kheradmandi, M.; Mhaskar, P. Data Driven Economic Model Predictive Control. Mathematics 2018, 6, 51. [Google Scholar] [CrossRef]
- Liu, T.; Hou, J.; Qin, S.J.; Wang, W. Subspace model identification under load disturbance with unknown transient and periodic dynamics. J. Process Control 2020, 85, 100–111. [Google Scholar] [CrossRef]
- Yu, M.; Liu, J.C.; Guo, G.; Zhang, W.L. Recursive subspace identification of continuous-time systems using generalized Poisson moment functionals. Circuits Syst. Signal Process. 2022, 41, 1848–1868. [Google Scholar] [CrossRef]
- Guo, J.; Jia, R.; Su, R.; Zhao, Y. Identification of fir systems with binary-valued observations against data tampering attacks. IEEE Trans. Syst. Man, Cybern. Syst. 2023, 53, 5861–5873. [Google Scholar] [CrossRef]
- Liu, L.; Liu, J.C.; Wang, H.H.; Tan, S.B.; Yu, M.; Xu, P. A multivariate monitoring method based on kernel principal component analysis and dual control chart. J. Process Control 2023, 127, 102994. [Google Scholar] [CrossRef]
- Bastogne, T.; Garnier, H.; Sibille, P. A PMF-based subspace method for continuous-time model identification. Application to a multivariable winding process. Int. J. Control 2001, 74, 118–132. [Google Scholar] [CrossRef]
- Varanasi, S.K.; Jampana, P. Nuclear norm subspace identification of continuous time state-space models with missing outputs. Control Eng. Pract. 2020, 95, 104239. [Google Scholar] [CrossRef]
- Bergamasco, M.; Lovera, M. Continuous-time predictor-based subspace identification using Laguerre filters. IET Control Theory Appl. 2011, 5, 856–867. [Google Scholar] [CrossRef]
- Hu, Y.S.; Fan, Y.; Wei, Y.H.; Wang, Y. Subspace-based continuous-time identification of fractional order systems from non-uniformly sampled data. Int. J. Syst. Sci. 2015, 47, 122–134. [Google Scholar] [CrossRef]
- Ohta, Y. Realization of input–output maps using generalized orthonormal basis functions. Syst. Control Lett. 2005, 54, 521–528. [Google Scholar] [CrossRef]
- Ohta, Y. Stochastic system transformation using generalized orthonormal basis functions with applications to continuous-time system identification. Automatica 2011, 47, 1001–1006. [Google Scholar] [CrossRef]
- Ohsumi, A.; Kameyama, K.; Yamaguchi, K.I. Subspace identification for continuous-time stochastic systems via distribution-based approach. Automatica 2002, 38, 63–78. [Google Scholar] [CrossRef]
- Huang, B.; Ding, S.X.; Qin, S.J. Closed-loop subspace identification: An orthogonal projection approach. J. Process Control 2005, 15, 53–66. [Google Scholar] [CrossRef]
- Wang, J.; Qin, S.J. Closed-loop subspace identification using the parity space. Automatica 2006, 42, 315–320. [Google Scholar] [CrossRef]
- Veen, G.V.D.; Wingerden, J.W.V.; Bergamasco, M.; Lovera, M.; Verhaegen, M. Closed-loop subspace identification methods: An overview. IET Control Theory Apply 2013, 7, 1339–1358. [Google Scholar] [CrossRef]
- Li, K.; Luo, H.; Jiang, Y.C.; Tang, D.J.; Yang, H.Y. Subspace identification for closed-loop systems with unknown deterministic disturbances. IEEE-CAA J. Autom. Sin. 2023, 10, 2248–2257. [Google Scholar] [CrossRef]
- Uematsu, R.; Masuda, S.; Kano, M. Closed-loop identification of plant and disturbance models based on data-driven generalized minimum variance regulatory control. J. Process Control 2022, 115, 197–208. [Google Scholar] [CrossRef]
- Breschi, V.; Chiuso, A.; Formentin, S. Data-driven predictive control in a stochastic setting: A unified framework. Automatica 2023, 152, 110961. [Google Scholar] [CrossRef]
- Trnka, P.; Havlena, V. Subspace like identification incorporating prior information. Automatica 2009, 45, 1086–1091. [Google Scholar] [CrossRef]
- Kung, S.Y. A new identification and model reduction algorithm via singular value decompositions. In Proceedings of the 12th Asilomar Conference on Circuits, Systems and Computers, Pacific Grove, CA, USA, 6–8 November 1978; pp. 705–714. [Google Scholar]
- Alenany, A.; Shang, H.; Soliman, M.; Ziedan, I. Improved subspace identification with prior information using constrained least squares. IET Control Theory Appl. 2011, 5, 1568–1576. [Google Scholar] [CrossRef]
- Alenany, A.; Shang, H. Recursive subspace identification with prior information using the constrained least squares approach. Comput. Chem. Eng. 2013, 54, 174–180. [Google Scholar] [CrossRef]
- Markovsky, I.; Mercère, G. Subspace identification with constraints on the impulse response. Int. J. Control 2017, 90, 1728–1735. [Google Scholar] [CrossRef]
- Wang, Y.Q.; Zhang, L.; Zhao, Y.L. Improved closed-loop subspace identification with prior information. Int. J. Syst. Sci. 2018, 49, 1821–1835. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, D.H.; Zhong, M.Y.; Wang, Y.Q. Improved closed-loop subspace identification based on principal component analysis and prior information. J. Process Control 2019, 80, 235–246. [Google Scholar] [CrossRef]
- Hou, J.; Chen, F.W.; Li, P.H.; Zhu, Z.Q. Prior-knowledge-based subspace identification for batch processes. J. Process Control 2019, 82, 22–30. [Google Scholar] [CrossRef]
- Heuberger, P.S.C.; Van den Hof, P.M.J.; Bosgra, O.H. A generalized orthogonal basis for linear dynamical systems. IEEE Trans. Autom. Control 1995, 40, 451–465. [Google Scholar] [CrossRef]
- Garnier, H.; Wang, L.P. Identification of Continuous-Time Models from Sampled Data; Springer: London, UK, 2008. [Google Scholar]
- Garnier, H.; Gilson, M.; Zheng, W.X. A bias-eliminated least-squares method for continuous-time model identification of closed-loop system. Int. J. Control 2000, 73, 38–48. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| step 1: |
| (1) Construct the data matrices . Form in Equation (38). |
| (2) Transform the prior information into and . Utilizing Equation (40) as a |
| constraint, the least-squares optimization problem is solved in Equation (39). |
| step 2: |
| (3) Estimate the impulse response parameters by Equation (51). |
| (4) Factorize using Kung’s realization algorithm in Equation (52). |
| step 3: |
| (5) Estimate the observability matrix and controllability matrix using Equation (53). |
| (6) Extract the system matrices by Equation (54). |
| Parameters | True | CLSPI-GOBF | CLS-GOBF | BELSM | |||
|---|---|---|---|---|---|---|---|
| Mean | Variance | Mean | Variance | Mean | Variance | ||
| 1 | 0.9957 | 0.0004 | 0.9578 | 0.0052 | 0.9347 | 0.0082 | |
| 0.5 | 0.4914 | 0.0005 | 0.4905 | 0.0041 | 0.4571 | 0.0021 | |
| 1 | 0.9685 | 0.0007 | 0.9458 | 0.0009 | 0.9120 | 0.0062 | |
| 1 | 0.9741 | 0.0005 | 0.9647 | 0.0010 | 0.9249 | 0.0073 | |
| Approach | Mean of | Variance of | Mean of | Variance of |
|---|---|---|---|---|
| CLSPI-GOBF | −1.9759 | 0.0025 | −1.9654 | 0.0086 |
| CLS-GOBF | −1.9524 | 0.0457 | −1.9204 | 0.0527 |
| BELSM | −1.9140 | 0.1547 | −1.8580 | 0.8426 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, M.; Wang, W.; Wang, Y. Closed-Loop Continuous-Time Subspace Identification with Prior Information. Mathematics 2023, 11, 4924. https://doi.org/10.3390/math11244924
Yu M, Wang W, Wang Y. Closed-Loop Continuous-Time Subspace Identification with Prior Information. Mathematics. 2023; 11(24):4924. https://doi.org/10.3390/math11244924
Chicago/Turabian StyleYu, Miao, Wanli Wang, and Youyi Wang. 2023. "Closed-Loop Continuous-Time Subspace Identification with Prior Information" Mathematics 11, no. 24: 4924. https://doi.org/10.3390/math11244924