
Modeling the Solution of the Pursuit–Evasion Problem Based on the Intelligent–Geometric Control Theory

Abstract
:1. Introduction
1.1. Motivation
1.2. Related Works
- Integration of both optimal and heuristic algorithms within a single concept to improve decision efficiency under conditions of uncertainty;
- Creation of a comprehensive approach, including the development of behavioral strategies, mathematical models of players, and simulation under disturbances;
- Performing adequate linearization of differential equations describing the dynamics of UAVs and introducing other simplifications that do not lead to a significant loss of accuracy of the resulting solutions.
1.3. Main Contributions
- The article describes the elements of the theory of intelligent–geometric control in relation to pursuit–evasion problems;
- Some game strategies have been developed for both the pursuer and the evader based on the solution of optimal problems and the application of heuristic rules;
- A model for predicting the movement of the evader is proposed, which expands the capabilities of the pursuer;
- Simulation of some game scenarios in a disturbed environment was carried out with the developed approaches.
- Subsequent sections are organized as follows:
- Section 2 contains problem statements for both the pursuer and the evader.
- Section 3 presents the architecture of intelligent–geometric control theory (Section 3.1), solutions to the optimization problem of the closest approach (Section 3.2 and Section 3.3), and heuristic strategies for players (Section 3.4). The problem of predicting the trajectory of the evader is considered in Section 3.5. The problem of moving along the required route given by waypoints is briefly described in Section 3.6.
- Section 4 is devoted to testing the proposed solutions. We first considered the planar case of the pursuit–evasion game in Section 4.1. Section 4.2 then discusses the dynamic model of an aircraft-type UAV and its linearization. Section 4.3 describes schemes for modeling the game in a disturbed environment for the spatial case. Simulation using the developed approach is carried out in Section 4.4.
- The final section, Section 5, contains the main conclusions and prospects for further research.
2. Problem Statement
2.1. General Pursuit and Evasion Problems
2.2. Optimal Convergence Problem
3. Materials and Methods
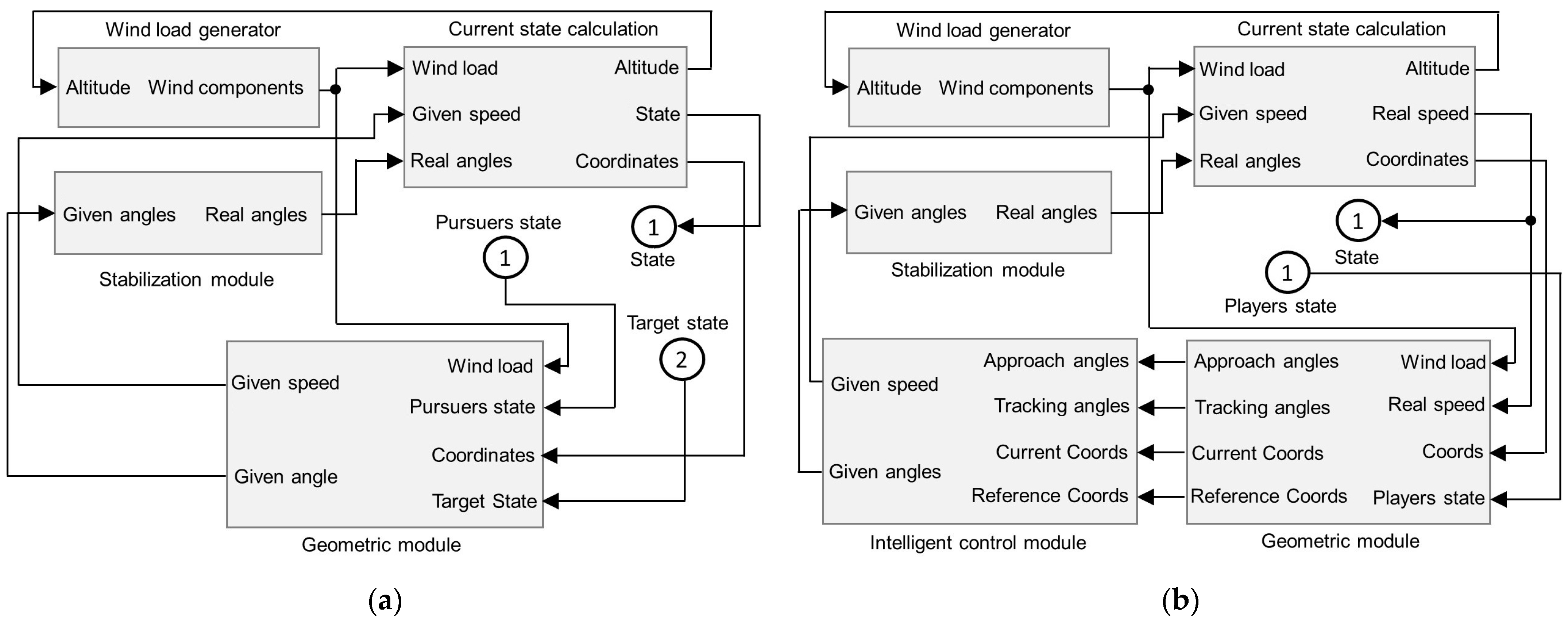
3.1. Intelligent–Geometric Control Architecture
3.2. Calculation of the Intercept Point
3.3. Solution of the Optimal Convergence Problem
3.4. Pursuit and Evasion Strategies
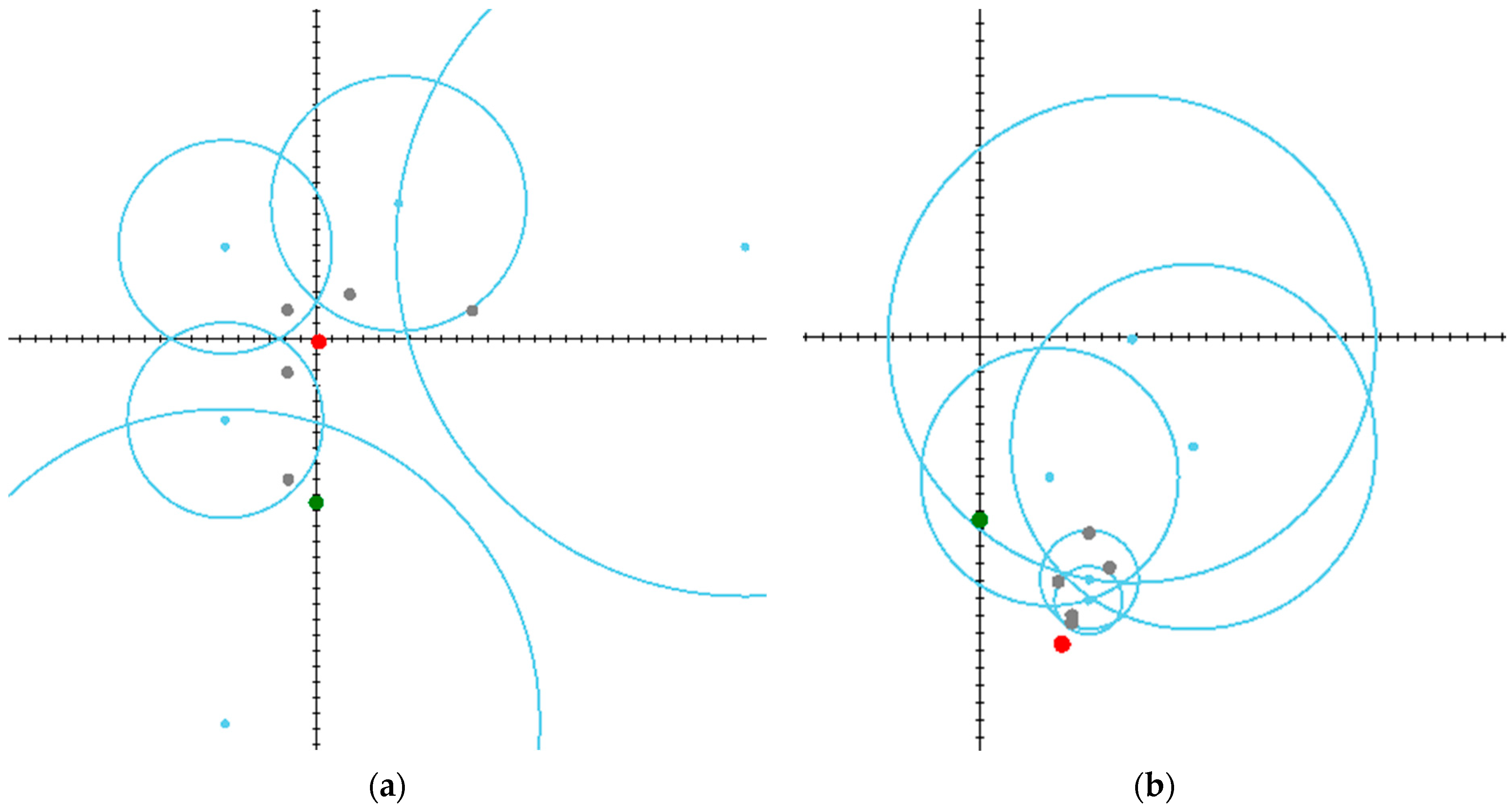
3.4.1. Evader’s Strategy
- If there are rays that do not intersect any of the Apollonius spheres, then choose the closest ray to the direction ;
- If exists, then the evader should move in this direction;
- If the ray cannot be calculated, then we suggest that the evader should move in the direction determined by vector (22).
3.4.2. Pursuer’s Strategy
- If the evader is located in a closed region bounded by the spheres of Apollonius, it fails to escape;
- If it is possible to construct a half-line that does not intersect any of the spheres, then the evader manages to escape;
- In more complex cases—for instance, when the evader has a target point—to solve the problem, it is necessary to perform an accurate simulation of the game.
- If the evader’s trajectory intersects with the corresponding sphere, then the pursuer must move to the point of convergence, which is calculated by Formulas (11) and (12);
- If the evader moves towards the Apollonius sphere but the exact intersection point cannot be calculated, it is necessary to move in the direction of the maximum approach, which is determined by Formulas (19) and (20);
- If the evader is moving away from the Apollonius sphere, then the pursuer must fly parallel to the evader by setting the appropriate direction. An alternative option is to build a forecast of the evader’s movement steps ahead, after which the pursuer begins to move to the calculated point , where is the current point in time and is the number of observed waypoints.
3.5. Neural Network Model for Predicting Evader’s Trajectory
- for :
- for :
3.5.1. Algorithm for Training a Two-Layer ANN with the s-Parabola Activation Function
- Initialization of initial parameters and weights.
- Calculation of a neural network in the forward direction:
- Calculation of the first-layer signals:where , is the displacement of the parabola along the axis. The superscript for variables indicates the number of the neural network layer.
- Calculation of signals of the second (output) layer:
- Calculation of errors in inputs and outputs of neurons in the backward direction.
- Errors at the output and input of the last layer neuron.Output error: , where is the current value of the neuron output. The required value is set by the user. Error at neuron input: , where is the given input value of the second-layer neuron:
- Errors at the output and input of the th neuron of the first layer containing neurons.Errors in neuron outputs: where is the normalizing coefficient. On the other hand, , where , are the given and current output values of the th neuron of the first layer.Calculation of input signals for the activation function:Error at the input of the th neuron of the first layer: .
- Correction of the neural network weights, which is carried out as follows:where is the normalizing coefficient, is the learning rate, .
- If the error at the output is less than the predetermined value, then a stop is performed. Otherwise, the learning rate is reduced by a certain amount, , and the transition to step 2 is carried out.
3.5.2. An Example of Predicting the Planar Trajectory of an Evader
3.6. Trajectory-Tracking Problem
4. Results
4.1. Planar Case
4.2. UAV Dynamics Model
- a, b, and c with various subscripts are the parameters of longitudinal dynamics depending on the UAV type and flight mode;
- k, l, and n with various subscripts are the parameters of lateral dynamics depending on the UAV type and flight mode;
- , , and are the pitch, yaw, and roll angles;
- is the elevator angle;
- , are deflection angles of the ailerons and rudder;
- , and are the projections of wind velocities on the , and axes of the base coordinate system;
- is the UAV speed relative to air in the unperturbed mode;
- are the projections of the UAV ground speed on the axes and ;
- , and are the coordinates of the center of mass on the , and axes;
- , and are the projections of the angular speed relative to air on the axes;
- is the correcting coefficient;
- is the Laplace transform parameter.
- The lateral and longitudinal motions are independent;
- The wind speed is significantly less than the speed of the UAV;
- The horizontal rectilinear flight under no wind conditions without roll and sliding is taken as the unperturbed mode.
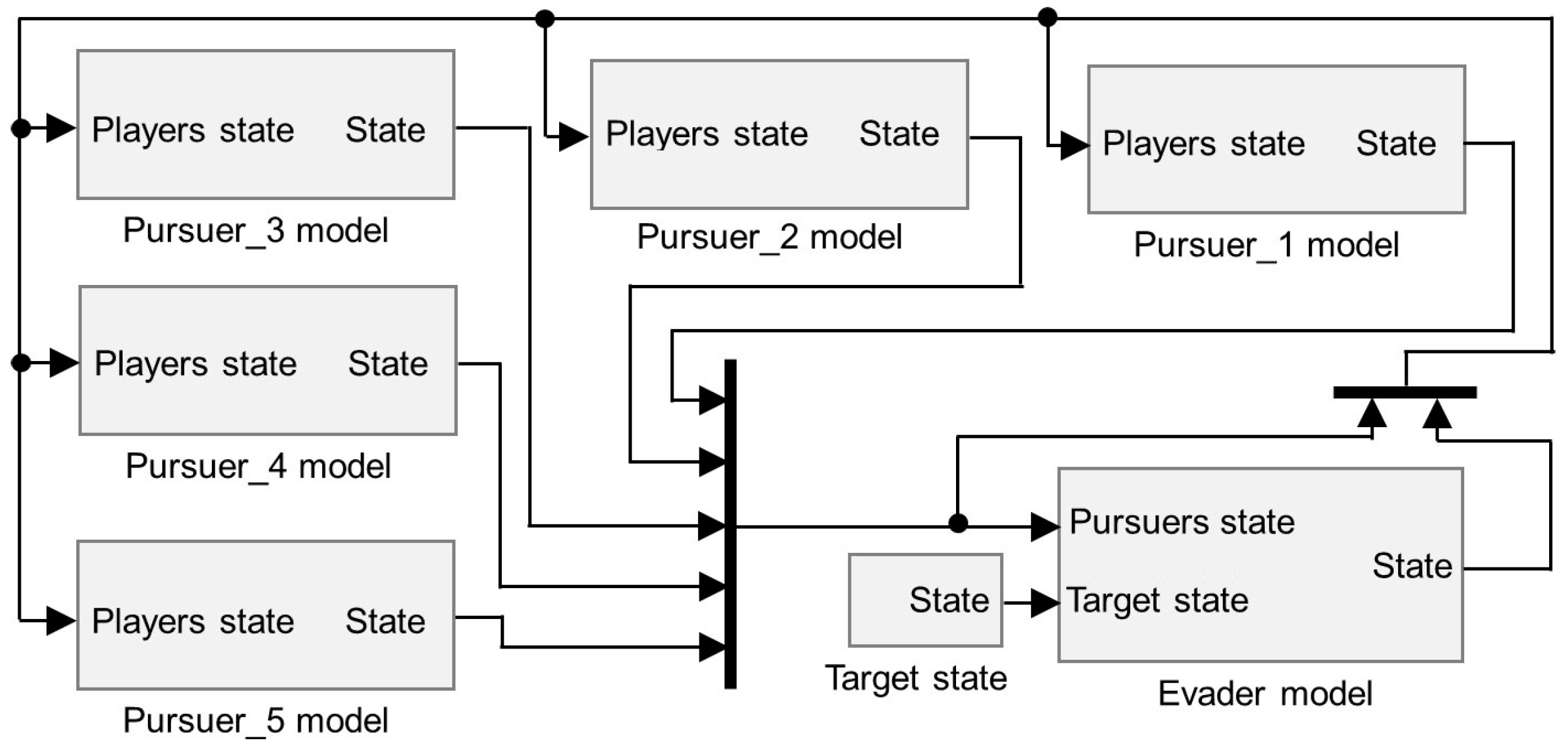
4.3. Matlab Simulation Scheme
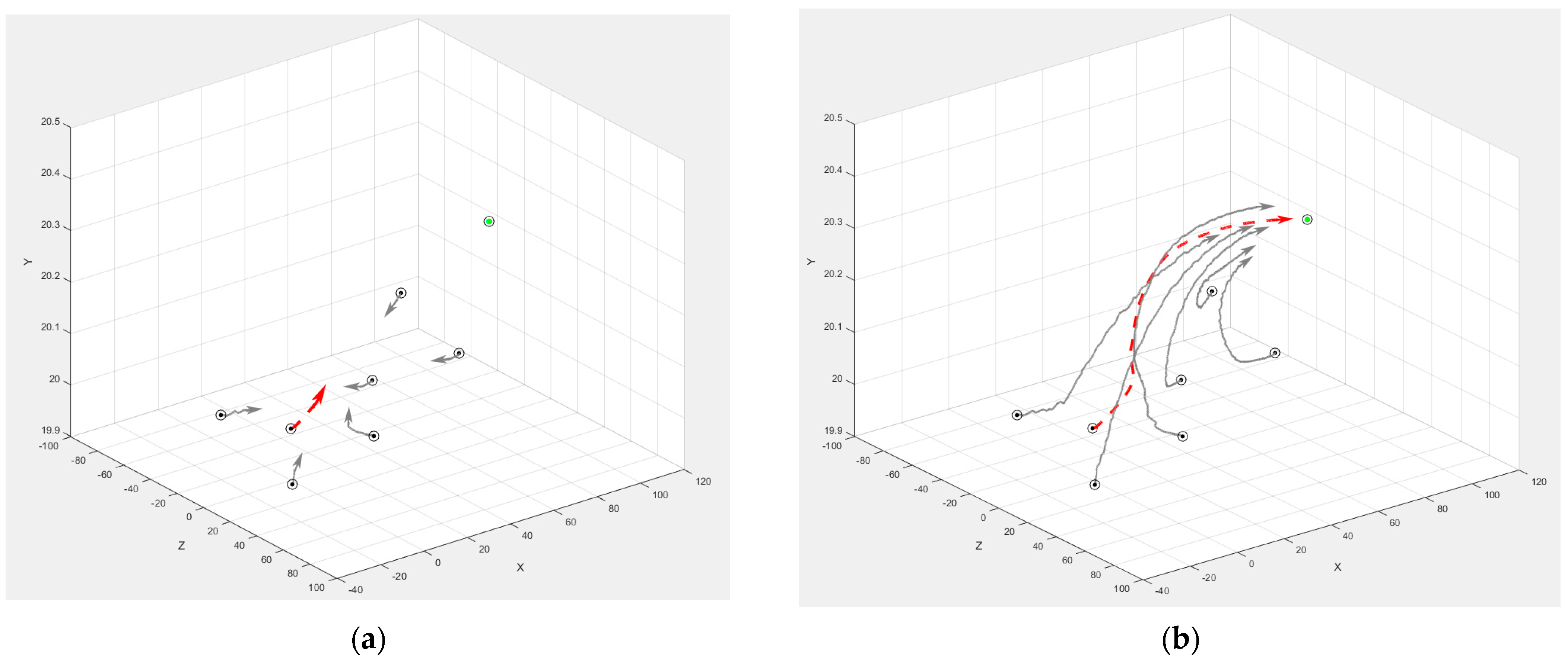
4.4. Spatial Case
5. Discussion
- For both the pursuers and the evader, we propose simple but effective heuristic rules that imitate the reasonable actions of a human operator in accordance with precise geometric calculations and the modified potential field approach.
- The problem of predicting the movement of an evader using a two-layer, fully connected feed-forward network is considered. A distinctive feature of the model is the use of a special activation function, which reduces the calculation time in conditions of limited computing power and the need to take prompt action.
- The solution of the trajectory tracking problem based on the principles of functioning of intelligent dynamic systems is discussed.
- A scheme for simulating pursuit–evasion games is proposed and studied that takes into account the dynamic models of participants and wind disturbances. A series of simulations conducted in MATLAB/Simulink environment demonstrates that the proposed strategies determine the natural behavior of dynamic objects under uncertainty.
- Pursuers can be considered as intelligent agents, endowed with the ability to exchange information and make collective decisions. This approach determines the need to conduct research at the strategic level, related to issues of goal setting and distribution of tasks between participants.
- The problem statement can be expanded, for example, by considering scenarios with the low-speed agile evader or where the pursuers know the evader’s target point.
- Further improvement of the intelligent component is seen in the introduction of a knowledge representation model for describing the workspace in the form of semantic networks and the creation of appropriate decision-making procedures, increasing the intelligence of the participants themselves through the development of goal-setting approaches. This, of course, will require the creation of new strategies and algorithms.
- Finally, natural experiments are needed to demonstrate in practice the effectiveness of the developed intelligent–geometric control algorithms.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol Name | Definition |
| Axes of the base coordinate system | |
| Axes of the coordinate system fixed to the vehicle, and parallel to axes , and . | |
| Axes of the coordinate system fixed to the vehicle (the axis is directed along the longitudinal axis, the axis is directed upward, and the axis is directed rightward). | |
| Evader. | |
| th pursuer in group . | |
| Coordinates of the evader. | |
| Coordinates of the pursuer . | |
| Speed of the evader. | |
| Speed of the pursuer . | |
| Pitch and yaw angles of the evader. | |
| Pitch and yaw angles of the pursuer . | |
| Target point of the evader. | |
| Time moment when the evader reaches its target. | |
| Time moment when at least one of the pursuers captures the evader. | |
| Required distance between the evader and its target point. | |
| Radius of the geometric model of a UAV. | |
| Pitch, yaw, and roll angles. | |
| State of pursuer (coordinates and velocity). | |
| State of the evader (coordinates and velocity). | |
| Distance between objects . | |
| Unit vector that starts from evader’s location point and coincides with the direction from to . | |
| Unit vector that starts from evader’s location point and coincides with the direction from to . | |
| Ray that does not intersect any of the Apollonius spheres. | |
| , | Parameters of longitudinal dynamics. |
| Parameters of lateral dynamics. | |
| Elevator angle. | |
| , | Deflection angles of the ailerons and rudder. |
| Coordinates of the center of mass on the , axes. | |
| UAV airspeed. | |
| UAV speed relative to air in the unperturbed mode. | |
| Projections of the UAV ground speed on the axis . | |
| Projections of the angular speed on the axes. | |
| Laplace transform parameter. | |
| Transfer function from the control action of the elevator to the pitch angular velocity . | |
| Transfer functions from the wind components and to the pitch angular velocity . | |
| Transfer function from the control action of the rudder to the yaw angular velocity . | |
| Transfer function from the wind component to the yaw angular velocity . | |
| Reference time moment corresponding to the passage of the point by the UAV. | |
| Moment of closest approach of the UAV to the waypoint . | |
| Intermediate reference waypoint of the route. | |
| Coordinates of the UAV at time . | |
| Pseudo-target that simulates an ideal flight path. | |
| β | Displacement of the parabola along the axis. |
| Sum of weighted inputs on the th neuron of the first/second layer. | |
| Output signal of the th neuron of the first/second layer. | |
| Weight of the connection between the th input value and the th neuron of the first layer. | |
| Neural network output. | |
| Error at the output/input of the second layer. | |
| Error at the output/input of the th neuron of the first layer. | |
| Subscript indicates the target values of the corresponding parameters . |
References
- Isaacs, R. Differential Games: A Mathematical Theory with Applications to Warfare and Pursuit, Control and Optimization; Dover Publications: Mineola, NY, USA, 1999; ISBN 978-0-486-40682-4. [Google Scholar]
- Yang, B.; Liu, P.; Feng, J.; Li, S. Two-Stage Pursuit Strategy for Incomplete-Information Impulsive Space Pursuit-Evasion Mission Using Reinforcement Learning. Aerospace 2021, 8, 299. [Google Scholar] [CrossRef]
- Weintraub, I.E.; Pachter, M.; Garcia, E. An Introduction to Pursuit-Evasion Differential Games. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1049–1066. [Google Scholar] [CrossRef]
- Pesch, H.J. Solving Optimal Control and Pursuit-Evasion Game Problems of High Complexity. In Computational Optimal Control; Bulirsch, R., Kraft, D., Eds.; Birkhäuser: Basel, Switzerland, 1994; pp. 43–61. ISBN 978-3-7643-5015-4. [Google Scholar]
- Wang, Z.; Gong, B.; Yuan, Y.; Ding, X. Incomplete Information Pursuit-Evasion Game Control for a Space Non-Cooperative Target. Aerospace 2021, 8, 211. [Google Scholar] [CrossRef]
- Pontryagin, L.S.; Boltyanskij, V.G.; Gamkrelidze, R.V.; Mishchenko, E.F. The Mathematical Theory of Optimal Processes; Pergamon: Oxford, UK, 1964. [Google Scholar]
- Petrosjan, L.A. Differential Games of Pursuit; World Scientific: Singapore, 1993; ISBN 978-981-02-0979-7. [Google Scholar]
- Krasovskii, N.N.; Subbotin, A.I. Game-Theoretical Control Problems; Springer: New York, NY, USA, 1988. [Google Scholar]
- Subbotin, A.I. Generalized Solutions of First Order PDEs: The Dynamical Optimization Perspective; System & Control: Foundations & Applications; Birkhäuser Boston: Boston, MA, USA, 1995; ISBN 978-1-4612-6920-5. [Google Scholar]
- Stipanović, D.M.; Melikyan, A.; Hovakimyan, N. Guaranteed Strategies for Nonlinear Multi-Player Pursuit-Evasion Games. Int. Game Theory Rev. 2010, 12, 1–17. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M.; Luan, P.; Zhou, J. Game Theory Methods for Pursuit-Evasion Problems. J. Phys. Conf. Ser. 2022, 2402, 012024. [Google Scholar] [CrossRef]
- Chung, T.H.; Hollinger, G.A.; Isler, V. Search and Pursuit-Evasion in Mobile Robotics: A Survey. Auton. Robot. 2011, 31, 299–316. [Google Scholar] [CrossRef]
- Zhang, L.; Prorok, A.; Bhattacharya, S. Pursuer Assignment and Control Strategies in Multi-Agent Pursuit-Evasion Under Uncertainties. Front. Robot. AI 2021, 8, 691637. [Google Scholar] [CrossRef]
- Borie, R.; Tovey, C.; Koenig, S. Algorithms and Complexity Results for Graph-Based Pursuit Evasion. Auton. Robot. 2011, 31, 317–332. [Google Scholar] [CrossRef]
- Sani, M.; Robu, B.; Hably, A. Pursuit-Evasion Game for Nonholonomic Mobile Robots with Obstacle Avoidance Using NMPC. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 15–18 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 978–983. [Google Scholar] [CrossRef]
- Han, L.; Song, W.; Yang, T.; Tian, Z.; Yu, X.; An, X. Cooperative Decisions of a Multi-Agent System for the Target-Pursuit Problem in Manned–Unmanned Environment. Electronics 2023, 12, 3630. [Google Scholar] [CrossRef]
- Sani, M.; Robu, B.; Hably, A. Pursuit-Evasion Games Based on Game-Theoretic and Model Predictive Control Algorithms. In Proceedings of the 2021 International Conference on Control, Automation and Diagnosis (ICCAD), Grenoble, France, 3–5 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, Z.-Y.; Liu, C.-L. A Novel Method Combining Leader-Following Control and Reinforcement Learning for Pursuit Evasion Games of Multi-Agent Systems. In Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 166–171. [Google Scholar] [CrossRef]
- Talebi, S.; Simaan, M.A.; Qu, Z. Cooperative, Non-Cooperative and Greedy Pursuers Strategies in Multi-Player Pursuit-Evasion Games. In Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA), Mauna Lani Resort, HI, USA, 27–30 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 2049–2056. [Google Scholar]
- Wang, X.; Cruz, J.B., Jr.; Chen, G.; Pham, K.; Blasch, E. Formation Control in Multi-Player Pursuit Evasion Game with Superior Evaders. In Defense Transformation and Net-Centric Systems; Suresh, R., Ed.; SPIE: Orlando, FL, USA, 2007; p. 657811. [Google Scholar]
- Casini, M.; Garulli, A. On the Advantage of Centralized Strategies in the Three-Pursuer Single-Evader Game. Syst. Control Lett. 2022, 160, 105122. [Google Scholar] [CrossRef]
- Liang, X.; Qu, X.; Wang, N.; Li, Y.; Zhang, R. A Novel Distributed and Self-Organized Swarm Control Framework for Underactuated Unmanned Marine Vehicles. IEEE Access 2019, 7, 112703–112712. [Google Scholar] [CrossRef]
- Nandwana, H.; Kashyap, V.; Chechani, A.; Saraswat, P.; Vijayvargiya, A. Design Analysis of Payload Carrying Quadcopter Using Finite Element Analysis. In Proceedings of the 2021 Smart Technologies, Communication and Robotics (STCR), Sathyamangalam, India, 9–10 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Akhloufi, M.A.; Couturier, A.; Castro, N.A. Unmanned Aerial Vehicles for Wildland Fires: Sensing, Perception, Cooperation and Assistance. Drones 2021, 5, 15. [Google Scholar] [CrossRef]
- Immanuel Damanik, J.A.; Dermawan Sitanggang, I.M.; Hutabarat, F.S.; Boy Knight, G.P.; Sagala, A. Quadcopter Unmanned Aerial Vehicle (UAV) Design for Search and Rescue (SAR). In Proceedings of the 2022 IEEE International Conference of Computer Science and Information Technology, Laguboti, North Sumatra, Indonesia, 19–21 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Cesare, K.; Skeele, R.; Yoo, S.-H.; Zhang, Y.; Hollinger, G. Multi-UAV Exploration with Limited Communication and Battery. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2230–2235. [Google Scholar]
- Ramesh, A.; Suseendhar, P.; Venugopal, E.; Sivakumar, P. An Overview of Navigation Algorithms for Unmanned Aerial Vehicle. In Proceedings of the 2023 International Conference on Intelligent Data Communication Technologies and Internet of Things (IDCIoT), Bengaluru, India, 5–7 January 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 724–727. [Google Scholar]
- Gottlieb, Y.; Shima, T. UAVs Task and Motion Planning in the Presence of Obstacles and Prioritized Targets. Sensors 2015, 15, 29734–29764. [Google Scholar] [CrossRef]
- Chen, Q.; Jin, Y.; Wang, T.; Wang, Y.; Yan, T.; Long, Y. UAV Formation Control Under Communication Constraints Based on Distributed Model Predictive Control. IEEE Access 2022, 10, 126494–126507. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q.-L.; Zuo, Z.; Jin, J.; Zheng, J. Collective Behaviors of Mobile Robots Beyond the Nearest Neighbor Rules with Switching Topology. IEEE Trans. Cybern. 2018, 48, 1577–1590. [Google Scholar] [CrossRef]
- Xue, M. UAV Trajectory Modeling Using Neural Networks. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2017. [Google Scholar]
- Zhang, Y.; Jia, Z.; Dong, C.; Liu, Y.; Zhang, L.; Wu, Q. Recurrent LSTM-Based UAV Trajectory Prediction with ADS-B Information. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Chen, S.; Chen, B.; Shu, P.; Wang, Z.; Chen, C. Real-Time Unmanned Aerial Vehicle Flight Path Prediction Using a Bi-Directional Long Short-Term Memory Network with Error Compensation. J. Comput. Des. Eng. 2023, 10, 16–35. [Google Scholar] [CrossRef]
- Yang, Z.; Tang, R.; Bao, J.; Lu, J.; Zhang, Z. A Real-Time Trajectory Prediction Method of Small-Scale Quadrotors Based on GPS Data and Neural Network. Sensors 2020, 20, 7061. [Google Scholar] [CrossRef]
- Peng, F.; Zheng, L.; Duan, Z.; Xia, Y. Multi-Objective Multi-Learner Robot Trajectory Prediction Method for IoT Mobile Robot Systems. Electronics 2022, 11, 2094. [Google Scholar] [CrossRef]
- Khachumov, M.V. Solution of the Problem of Group Pursuit of a Target Under Perturbations (Spatial Case). Sci. Tech. Inf. Process. 2018, 45, 435–443. [Google Scholar] [CrossRef]
- Botkin, N.; Turova, V.; Hosseini, B.; Diepolder, J.; Holzapfel, F. Tracking Aircraft Trajectories in the Presence of Wind Disturbances. Math. Control Relat. Fields 2021, 11, 499–520. [Google Scholar] [CrossRef]
- Gerdt, A.; Diepolder, J.; Hosseini, B.; Turova, V. Implementation of a robust differential game-based trajectory tracking approach on a realistic flight simulator. In Proceedings of the Mathematical Modeling and Scientific Computing: Focus on Complex Processes and Systems 2020, Munich, Germany, 19–20 November 2020; CEUR: Munich, Germany, 2020. [Google Scholar]
- Radmanesh, M.; Kumar, M.; Guentert, P.H.; Sarim, M. Overview of Path-Planning and Obstacle Avoidance Algorithms for UAVs: A Comparative Study. Unmanned Syst. 2018, 06, 95–118. [Google Scholar] [CrossRef]
- Khatib, O. The Potential Field Approach and Operational Space Formulation in Robot Control. In Adaptive and Learning Systems; Narendra, K.S., Ed.; Springer: Boston, MA, USA, 1986; pp. 367–377. ISBN 978-1-4757-1897-3. [Google Scholar]
- Hao, G.; Lv, Q.; Huang, Z.; Zhao, H.; Chen, W. UAV Path Planning Based on Improved Artificial Potential Field Method. Aerospace 2023, 10, 562. [Google Scholar] [CrossRef]
- Duvocelle, B.; Flesch, J.; Shi, H.M.; Vermeulen, D. Search for a Moving Target in a Competitive Environment. Int. J. Game Theory 2021, 50, 547–557. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, W.; Ding, J.; Huang, H.; Stipanović, D.M.; Tomlin, C.J. Cooperative Pursuit with Voronoi Partitions. Automatica 2016, 72, 64–72. [Google Scholar] [CrossRef]
- Khachumov, M. Hierarchical Intelligent-Geometric Control Architecture for Unmanned Aerial Vehicles Operating in Uncertain Environments. In Artificial Intelligence and Soft Computing; Rutkowski, L., Scherer, R., Korytkowski, M., Pedrycz, W., Tadeusiewicz, R., Zurada, J.M., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2020; Volume 12416, pp. 492–504. ISBN 978-3-030-61533-8. [Google Scholar]
- Jurdjevic, V. Geometric Control Theory, 1st ed.; Cambridge University Press: Cambridge, UK, 2008; ISBN 978-0-521-05824-7. [Google Scholar]
- Sachkov, Y. Introduction to Geometric Control; Springer Optimization and Its Applications; Springer International Publishing: Cham, Switzerland, 2022; Volume 192, ISBN 978-3-031-02072-8. [Google Scholar]
- Sun, Z.; Sun, H.; Li, P.; Zou, J. Self-Organizing Cooperative Pursuit Strategy for Multi-USV with Dynamic Obstacle Ships. J. Mar. Sci. Eng. 2022, 10, 562. [Google Scholar] [CrossRef]
- Khachumov, M. Tactical Level of Intelligent Geometric Control System for Unmanned Aerial Vehicles. In Proceedings of 15th International Conference on Electromechanics and Robotics “Zavalishin’s Readings”; Ronzhin, A., Shishlakov, V., Eds.; Smart Innovation, Systems and Technologies; Springer: Singapore, 2021; Volume 187, pp. 55–67. ISBN ISBN 9789811555794. [Google Scholar]
- Vinter, R.B. Optimal Control and Pontryagin’s Maximum Principle. In Encyclopedia of Systems and Control; Baillieul, J., Samad, T., Eds.; Springer: London, UK, 2013; pp. 1–9. ISBN 978-1-4471-5102-9. [Google Scholar]
- Khachumov, M.; Emelyanova, Y.; Khachumov, V. Parabola-Based Artificial Neural Network Activation Functions. In Proceedings of the 2023 International Russian Automation Conference (RusAutoCon), Sochi, Russia, 10–16 September 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 249–254. [Google Scholar]
- Osipov, G.S. Intelligent Dynamic Systems. Sci. Tech. Inf. Process. 2010, 37, 259–264. [Google Scholar] [CrossRef]
- Abramov, N.S.; Makarov, D.A.; Khachumov, M.V. Controlling Flight Vehicle Spatial Motion along a given Route. Autom. Remote Control 2015, 76, 1070–1080. [Google Scholar] [CrossRef]
- Dobrolensky, Y.P. Flight Dynamics in a Turbulent Atmosphere; Mashinostroenie: Moscow, Russia, 1969. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Evader | Pursuer 1 | Pursuer 2 | Pursuer 3 | Pursuer 4 | Pursuer 5 | Target | Evader Escapes | Evader Reaches the Target |
|---|---|---|---|---|---|---|---|---|---|
| 1 | (0, 0), 5 | (20, 30), 4 | (−20, 20), 4 | (−20, −20), 4 | (100, 20), 4 | (−20, −90), 4 | (−5, −100) | Yes/Yes | No |
| 2 | (0, 0), 5 | (30, 20), 4 | (−30, −50), 4 | (−70, 40), 3 | (100, −20), 4 | (100, −90), 4 | (100, 150) | Yes/Yes | Yes |
| 3 | (0, 0), 5 | (30, 30), 4 | (−30, 30), 4 | (−30, −30), 4 | (200, −20), 4 | (50, −190), 4 | - | No/Yes | - |
| 4 | (0, 0), 5 | (20, 20), 4 | (−20, 20), 4 | (−20, −20), 4 | (100, −20), 4 | (100, −90), 4 | (−50, −50) | Yes/Yes | No |
| 5 | (0, 0), 5 | (20, 20), 4 | (−20, 20), 4 | (−20, −20), 4 | (100, −20), 4 | (100, −90), 4 | (−150, −150) | Yes/Yes | Yes |
| 6 | (0, 0), 5 | (30, 20), 4 | (−30, 20), 4 | (−30, −20), 3 | (100, −20), 4 | (100, −90), 4 | (−100, −150) | Yes/Yes | Yes |
| 7 | (0, 0), 5 | (30, 30), 3 | (−30, 30), 3 | (−30, −30), 3 | (200, −20), 4 | (50, −190), 4 | - | Yes/Yes | - |
| 8 | (0, 0), 5 | (20, 20), 4 | (−20, 20), 4 | (−20, −20), 4 | (100, 0), 4 | (0, −90), 4 | - | No/Yes | - |
| 9 | (0, 0), 5 | (20, 20), 3 | (−20, 20), 3 | (−20, −20), 4 | (100, −10), 4 | (−40, −100), 4 | - | Yes/Yes | - |
| 10 | (0, 0), 5 | (20, 20), 4 | (−20, 20), 4 | (−20, −20), 4 | (50, 0), 4 | (0, −50), 4 | - | No/No | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khachumov, M.; Khachumov, V. Modeling the Solution of the Pursuit–Evasion Problem Based on the Intelligent–Geometric Control Theory. Mathematics 2023, 11, 4869. https://doi.org/10.3390/math11234869
Khachumov M, Khachumov V. Modeling the Solution of the Pursuit–Evasion Problem Based on the Intelligent–Geometric Control Theory. Mathematics. 2023; 11(23):4869. https://doi.org/10.3390/math11234869
Chicago/Turabian StyleKhachumov, Mikhail, and Vyacheslav Khachumov. 2023. "Modeling the Solution of the Pursuit–Evasion Problem Based on the Intelligent–Geometric Control Theory" Mathematics 11, no. 23: 4869. https://doi.org/10.3390/math11234869