


A Parameterized Modeling Method for Magnetic Circuits of Adjustable Permanent Magnet Couplers
Abstract
:1. Introduction
1.1. Types of Adjustable Permanent Magnet Couplers
1.2. Methodologies in Adjustable Permanent Magnet Coupler Modeling
1.3. Summary
2. Theories and Methods
2.1. Assumptions and Definition
- The relative velocity between the conductor rotor and the PM rotor is vre;
- Each layer is homogeneous with uniform material properties, and the air regions outside the two back-iron layers are not considered;
- The thickness of the rotor back-iron is sufficient to prevent magnetic saturation;
- The eddy current effect of the PMs is not considered.
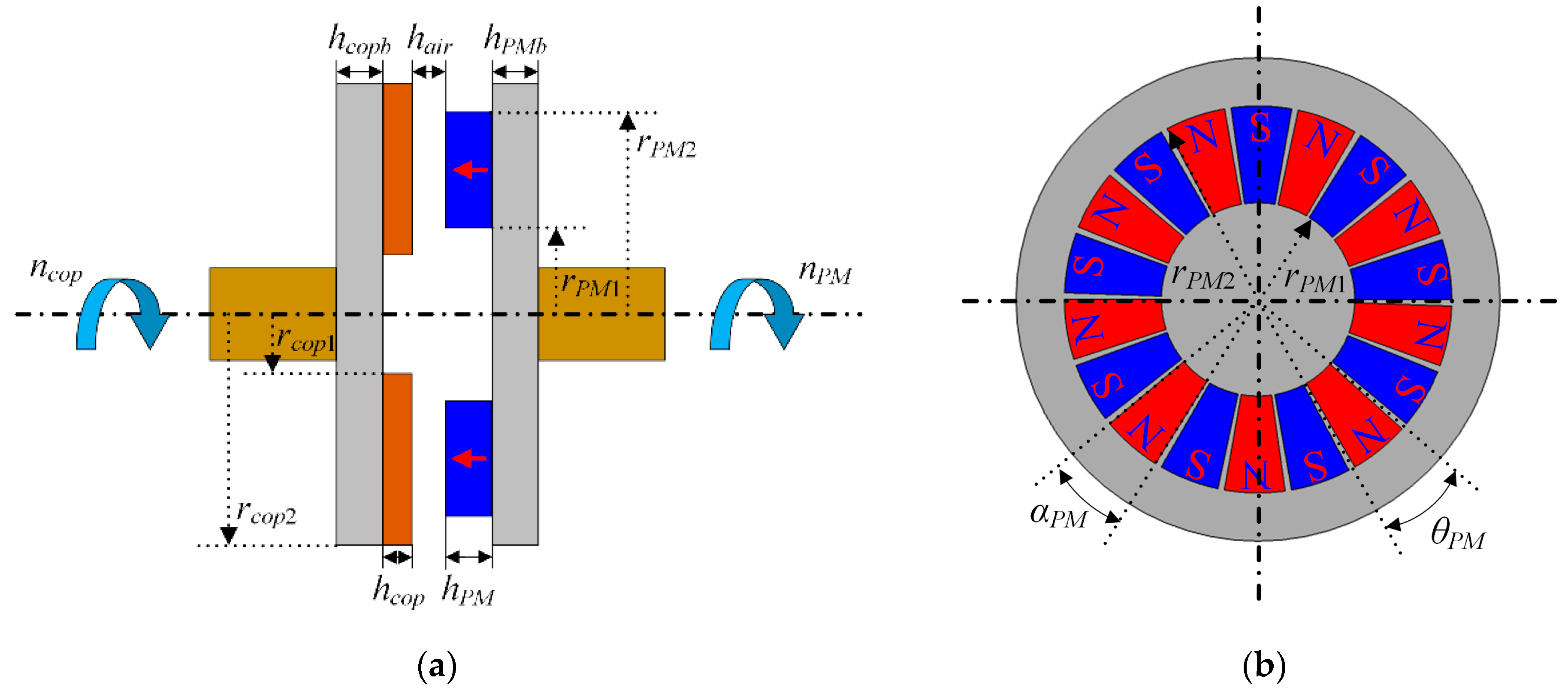
2.2. Geometries and Topologies
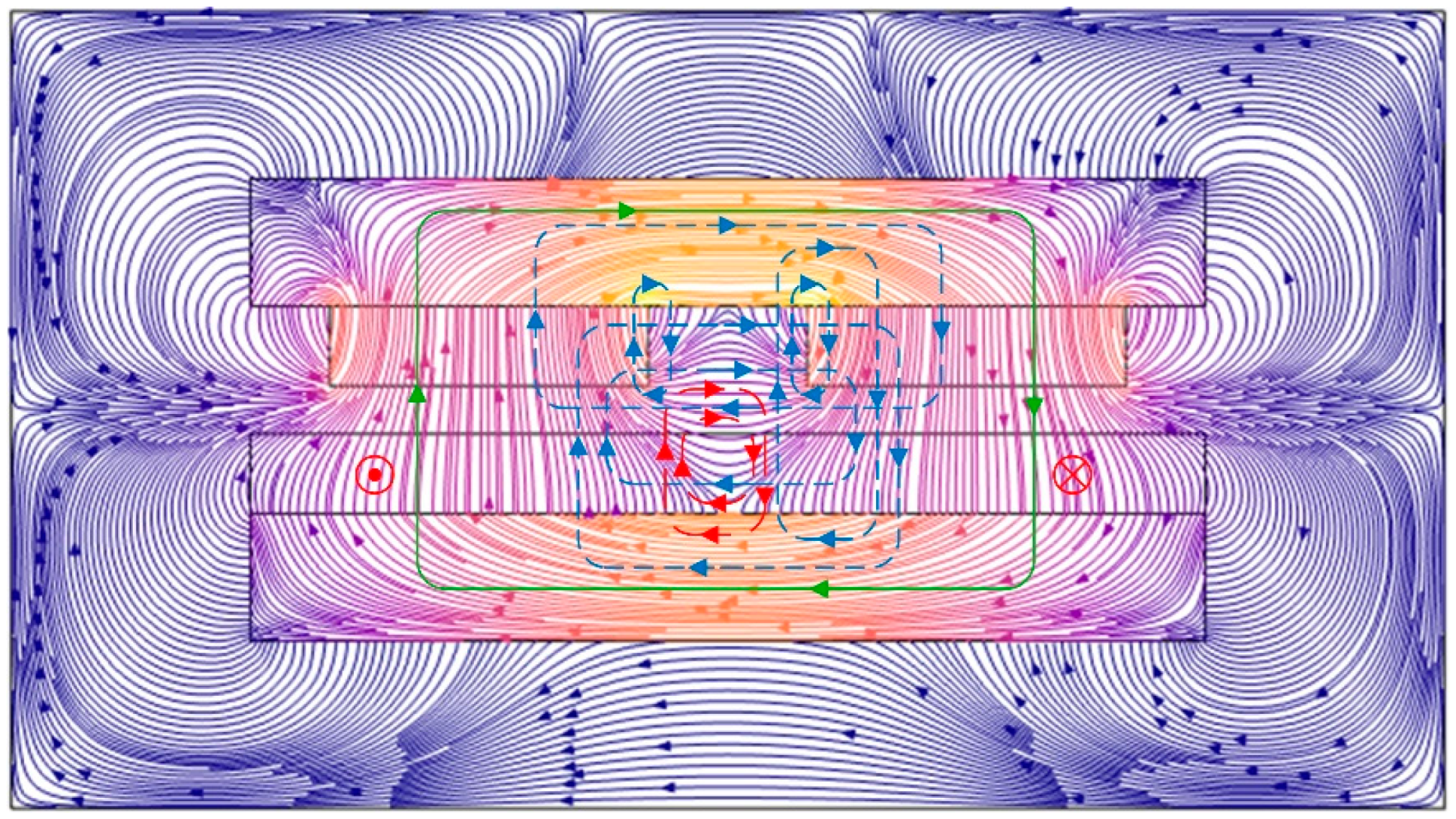
2.3. Programming of Magnetic Flux Paths
2.4. Equivalent Magnetic Circuit Method
2.4.1. Novel Equivalent Magnetic Circuit Model
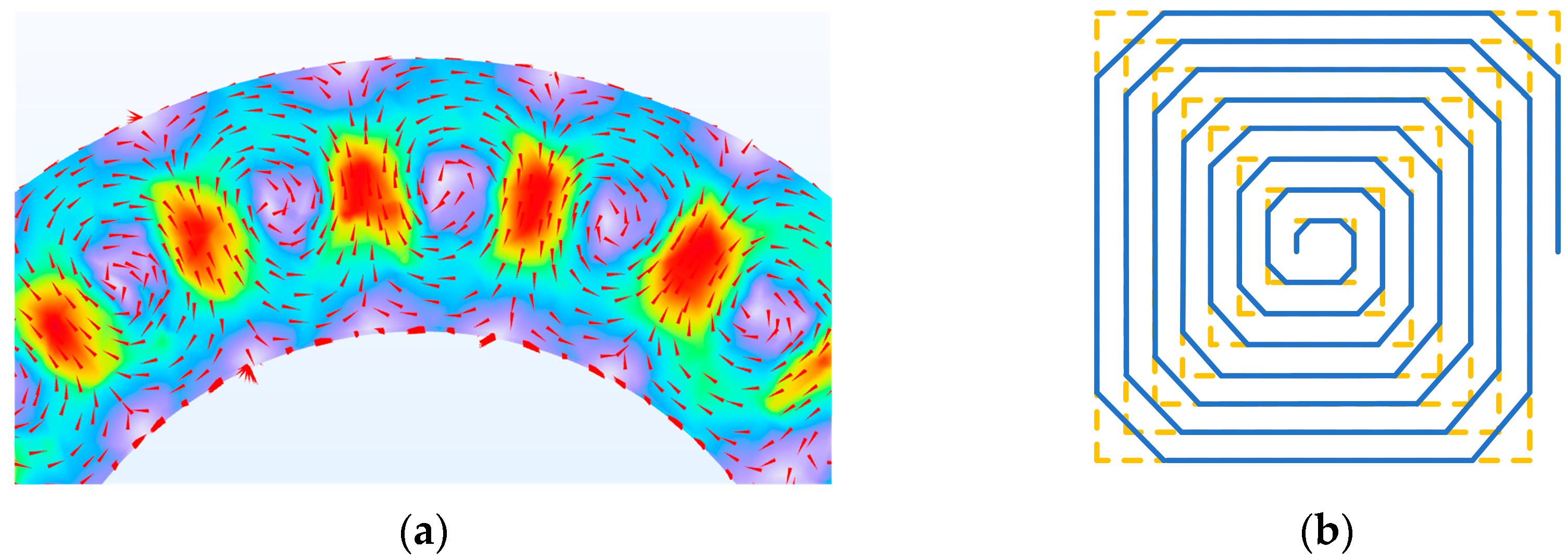
2.4.2. Eddy Current Circuit Modeling
2.4.3. Calculation of Eddy Current Losses and Torque
3. Verification and Discussion for Proposed Model
3.1. Description of 3D Finite Element Model
3.2. Parameter Sensitivity Analysis
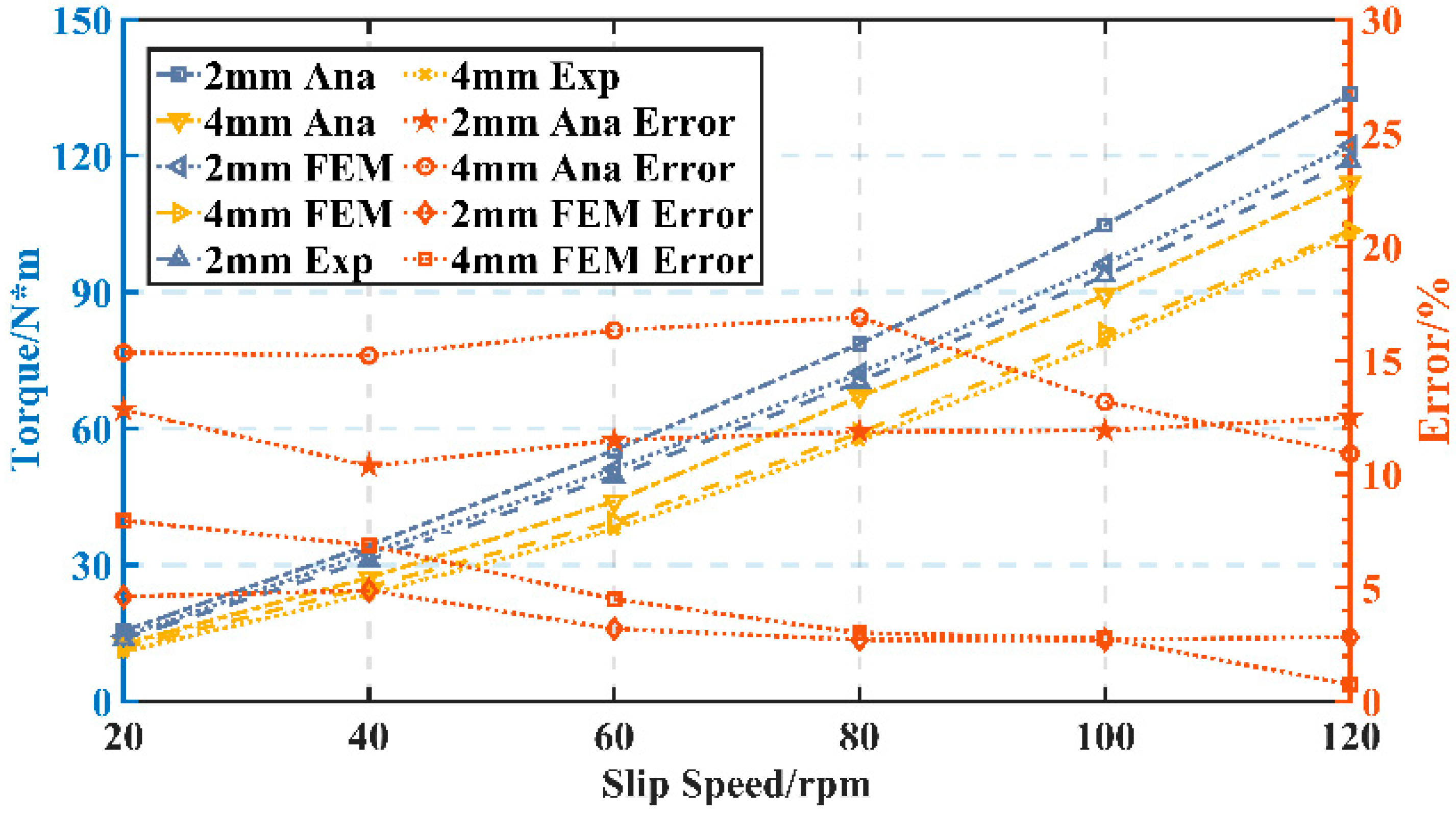
3.2.1. Torque–Slip Speed Characteristics Related to Conductor Plate Thickness
3.2.2. Torque–Slip Speed Characteristics Related to Air Gap Thickness
3.2.3. Eddy Current Loss–Slip Speed Characteristics Related to Air Gap Thickness
3.2.4. Torque–Slip Speed Characteristics Related to the Number of Pole Pairs
3.2.5. Dynamic Torque Characteristics
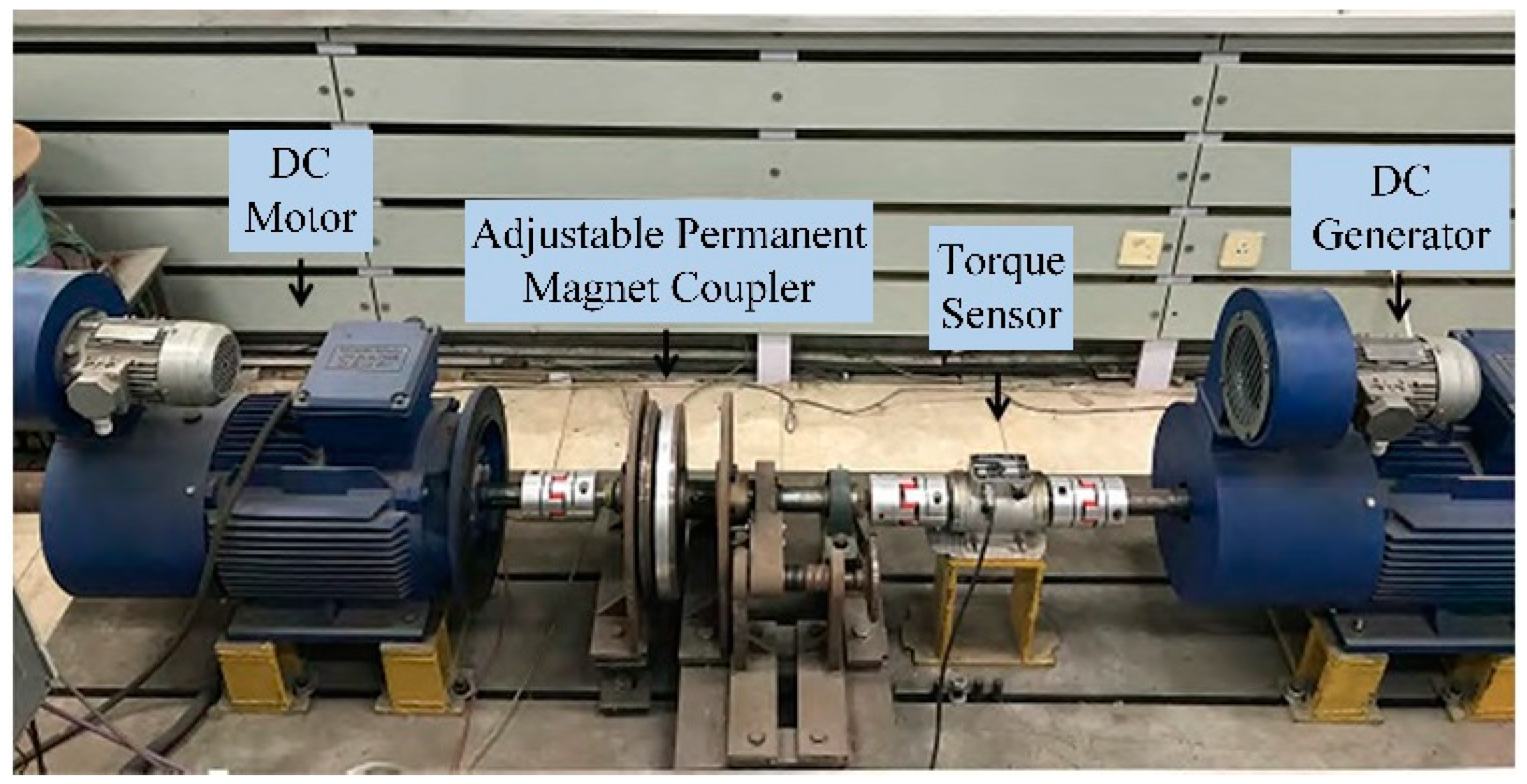
3.3. Experimental Prototype Validation
4. Conclusions and Future Highlights
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Ye, L.; Li, D.; Ma, Y.; Jiao, B. Design and Performance of a Water-Cooled Permanent Magnet Retarder for Heavy Vehicles. IEEE Trans. Energy Convers. 2011, 26, 953–958. [Google Scholar] [CrossRef]
- Wang, J.; Lin, H.; Fang, S.; Huang, Y. A General Analytical Model of Permanent Magnet Eddy Current Couplings. IEEE Trans. Magn. 2014, 50, 1–9. [Google Scholar] [CrossRef]
- Atallah, K.; Wang, J. A Brushless Permanent Magnet Machine with Integrated Differential. IEEE Trans. Magn. 2011, 47, 4246–4249. [Google Scholar] [CrossRef]
- Yang, X.; Liu, Y.; Wang, L. Nonlinear Modeling of Transmission Performance for Permanent Magnet Eddy Current Coupler. Math. Probl. Eng. 2019, 2019, 1–14. [Google Scholar] [CrossRef]
- Shin, H.-J.; Choi, J.-Y.; Jang, S.-M.; Lim, K.-Y. Design and Analysis of Axial Permanent Magnet Couplings Based on 3D FEM. IEEE Trans. Magn. 2013, 49, 3985–3988. [Google Scholar] [CrossRef]
- Potgieter, J.H.J.; Kamper, M.J. Optimum Design and Comparison of Slip Permanent-Magnet Couplings with Wind Energy as Case Study Application. IEEE Trans. Ind. Appl. 2014, 50, 3223–3234. [Google Scholar] [CrossRef]
- Gay, S.E.; Ehsani, M. Parametric Analysis of Eddy-Current Brake Performance by 3-D Finite-Element Analysis. IEEE Trans. Magn. 2006, 42, 319–328. [Google Scholar] [CrossRef]
- Canova, A.; Cavalli, F. Design Procedure for Hysteresis Couplers. IEEE Trans. Magn. 2008, 44, 2381–2395. [Google Scholar] [CrossRef]
- Zhang, B.; Wan, Y.; Li, Y.; Feng, G. Optimized Design Research on Adjustable-Speed Permanent Magnet Coupling. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; IEEE: New York, NY, USA, 2013; pp. 380–385. [Google Scholar]
- Erasmus, A.S.; Kamper, M.J. Analysis for Design Optimisation of Double PM-Rotor Radial Flux Eddy Current Couplers. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; IEEE: New York, NY, USA; pp. 6503–6510. [Google Scholar]
- Canova, A.; Vusini, B. Design of Axial Eddy-Current Couplers. IEEE Trans. Ind. Appl. 2003, 39, 725–733. [Google Scholar] [CrossRef]
- Canova, A.; Vusini, B. Analytical Modeling of Rotating Eddy-Current Couplers. IEEE Trans. Magn. 2005, 41, 24–35. [Google Scholar] [CrossRef]
- Shin, H.-J.; Choi, J.-Y.; Cho, H.-W.; Jang, S.-M. Analytical Torque Calculations and Experimental Testing of Permanent Magnet Axial Eddy Current Brake. IEEE Trans. Magn. 2013, 49, 4152–4155. [Google Scholar] [CrossRef]
- Park, M.-G.; Choi, J.-Y.; Shin, H.-J.; Jang, S.-M. Torque Analysis and Measurements of a Permanent Magnet Type Eddy Current Brake with a Halbach Magnet Array Based on Analytical Magnetic Field Calculations. J. Appl. Phys. 2014, 115, 17E707. [Google Scholar] [CrossRef]
- Lubin, T.; Rezzoug, A. Steady-State and Transient Performance of Axial-Field Eddy-Current Coupling. IEEE Trans. Ind. Electron. 2015, 62, 2287–2296. [Google Scholar] [CrossRef]
- Lubin, T.; Rezzoug, A. 3-D Analytical Model for Axial-Flux Eddy-Current Couplings and Brakes Under Steady-State Conditions. IEEE Trans. Magn. 2015, 51, 1–12. [Google Scholar] [CrossRef]
- Lubin, T.; Rezzoug, A. Improved 3-D Analytical Model for Axial-Flux Eddy-Current Couplings with Curvature Effects. IEEE Trans. Magn. 2017, 53, 1–9. [Google Scholar] [CrossRef]
- Jang, G.-H.; Koo, M.-M.; Kim, J.-M.; Choi, J.-Y. Torque Characteristic Analysis and Measurement of Axial Flux-Type Non-Contact Permanent Magnet Device with Halbach Array Based on 3D Analytical Method. AIP Adv. 2017, 7, 056647. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. Two-Dimensional Analytical Calculation of Magnetic Field and Electromagnetic Torque for Surface-Inset Permanent-Magnet Motors. IEEE Trans. Magn. 2012, 48, 2080–2091. [Google Scholar] [CrossRef]
- Sheikh-Ghalavand, B.; Vaez-Zadeh, S.; Hassanpour Isfahani, A. An Improved Magnetic Equivalent Circuit Model for Iron-Core Linear Permanent-Magnet Synchronous Motors. IEEE Trans. Magn. 2010, 46, 112–120. [Google Scholar] [CrossRef]
- Qu, R.; Lipo, T.A. Analysis and Modeling of Air-Gap and Zigzag Leakage Fluxes in a Surface-Mounted Permanent-Magnet Machine. IEEE Trans. Ind. Appl. 2004, 40, 121–127. [Google Scholar] [CrossRef]
- Momen, M.F.; Datta, S. Analysis of Flux Leakage in a Segmented Core Brushless Permanent Magnet Motor. IEEE Trans. Energy Convers. 2009, 24, 77–81. [Google Scholar] [CrossRef]
- Aberoomand, V.; Mirsalim, M.; Fesharakifard, R. Design Optimization of Double-Sided Permanent-Magnet Axial Eddy-Current Couplers for Use in Dynamic Applications. IEEE Trans. Energy Convers. 2019, 34, 909–920. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, J. A Simple Method for Performance Prediction of Permanent Magnet Eddy Current Couplings Using a New Magnetic Equivalent Circuit Model. IEEE Trans. Ind. Electron. 2018, 65, 2487–2495. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. Simple Analytical Expressions for the Force and Torque of Axial Magnetic Couplings. IEEE Trans. Energy Convers. 2012, 27, 536–546. [Google Scholar] [CrossRef]
- You, S.-A.; Wang, S.-H.; Tsai, M.-C.; Mao, S.-H. Characteristic Analysis of Slotted-Type Axial-Flux Permanent Magnetic Couplers. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems, Sapporo, Japan, 21–24 October 2012; p. 5. [Google Scholar]
- de la Barriere, O.; Hlioui, S.; Ben Ahmed, H.; Gabsi, M.; LoBue, M. 3-D Formal Resolution of Maxwell Equations for the Computation of the No-Load Flux in an Axial Flux Permanent-Magnet Synchronous Machine. IEEE Trans. Magn. 2012, 48, 128–136. [Google Scholar] [CrossRef]
- Chen, J.T.; Zhu, Z.Q. Influence of the Rotor Pole Number on Optimal Parameters in Flux-Switching PM Brushless AC Machines by the Lumped-Parameter Magnetic Circuit Model. IEEE Trans. Ind. Appl. 2010, 46, 1381–1388. [Google Scholar] [CrossRef]
- Yang, F.; Zhu, J.; Yang, C.; Ding, Y.; Hang, T. A Simple Method to Calculate the Torque of Magnet-Rotating-Type Axial Magnetic Coupler Using a New Magnetic Equivalent Circuit Model. IEEE Trans. Magn. 2022, 58, 1–12. [Google Scholar] [CrossRef]
- Jenei, S.; Nauwelaers, B.; Decoutere, S.; Nacm, A. Closed form inductance calculation for integrated spiral inductor compact modeling. In Proceedings of the 2000 Topical Meeting on Silicon Monolithic Integrated Circuits in Rf Systems, Digest of Papers, Garmisch Partenki, Germany, 26–28 April 2000. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| PM remanence BPM | 1.25 | T |
| PM inner radius rPM1 | 105 | mm |
| PM outer radius rPM2 | 135 | mm |
| Copper inner radius rcop1 | 90 | mm |
| Copper outer radius rcop2 | 150 | mm |
| Copper conductivity σcop | 58 | MS |
| Number of pole pairs p | 9 | / |
| Back-iron thickness of copper hcopb | 20 | mm |
| Back-iron thickness of PMs hPMb | 20 | mm |
| Copper thickness hcop | 10 | mm |
| PM thickness hPM | 30 | mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Li, W.; Wang, J.; Song, K.; Ni, Y.; Li, Y. A Parameterized Modeling Method for Magnetic Circuits of Adjustable Permanent Magnet Couplers. Mathematics 2023, 11, 4793. https://doi.org/10.3390/math11234793
Wang D, Li W, Wang J, Song K, Ni Y, Li Y. A Parameterized Modeling Method for Magnetic Circuits of Adjustable Permanent Magnet Couplers. Mathematics. 2023; 11(23):4793. https://doi.org/10.3390/math11234793
Chicago/Turabian StyleWang, Dazhi, Wenhui Li, Jiaxing Wang, Keling Song, Yongliang Ni, and Yanming Li. 2023. "A Parameterized Modeling Method for Magnetic Circuits of Adjustable Permanent Magnet Couplers" Mathematics 11, no. 23: 4793. https://doi.org/10.3390/math11234793