
Locating Anchor Drilling Holes Based on Binocular Vision in Coal Mine Roadways

Abstract
:1. Introduction
- (1)
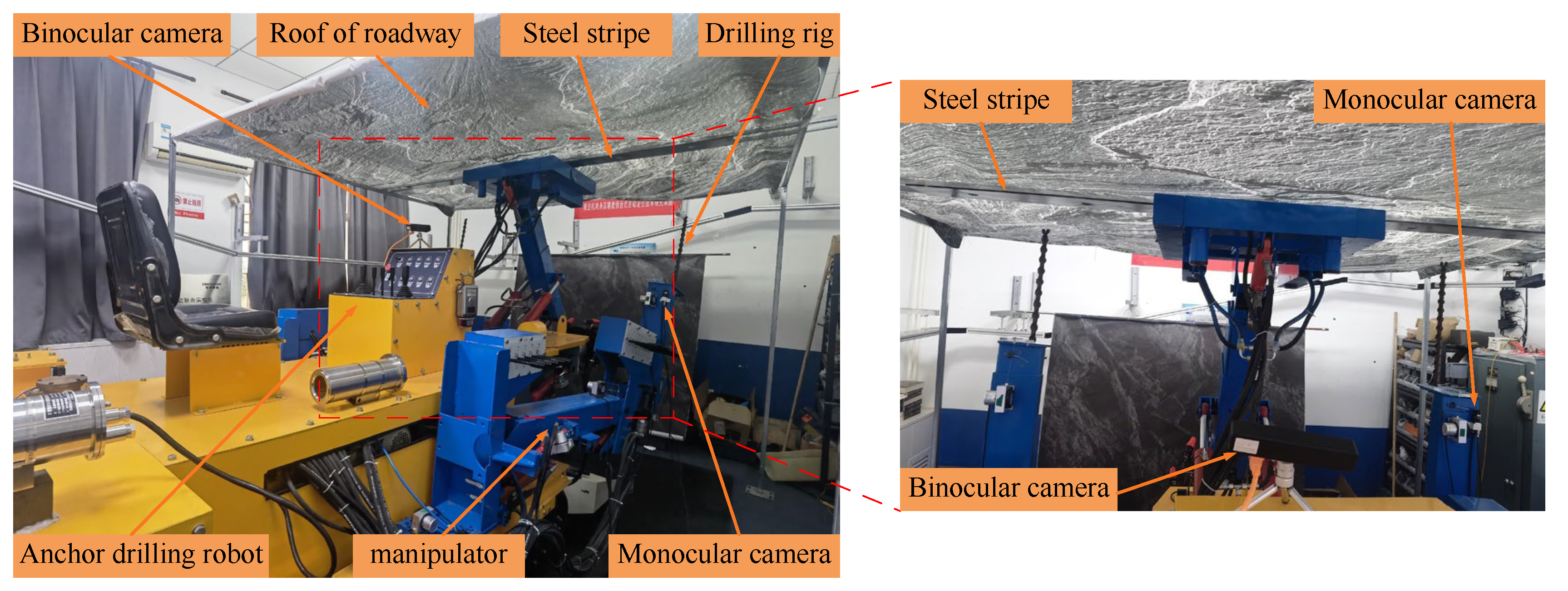
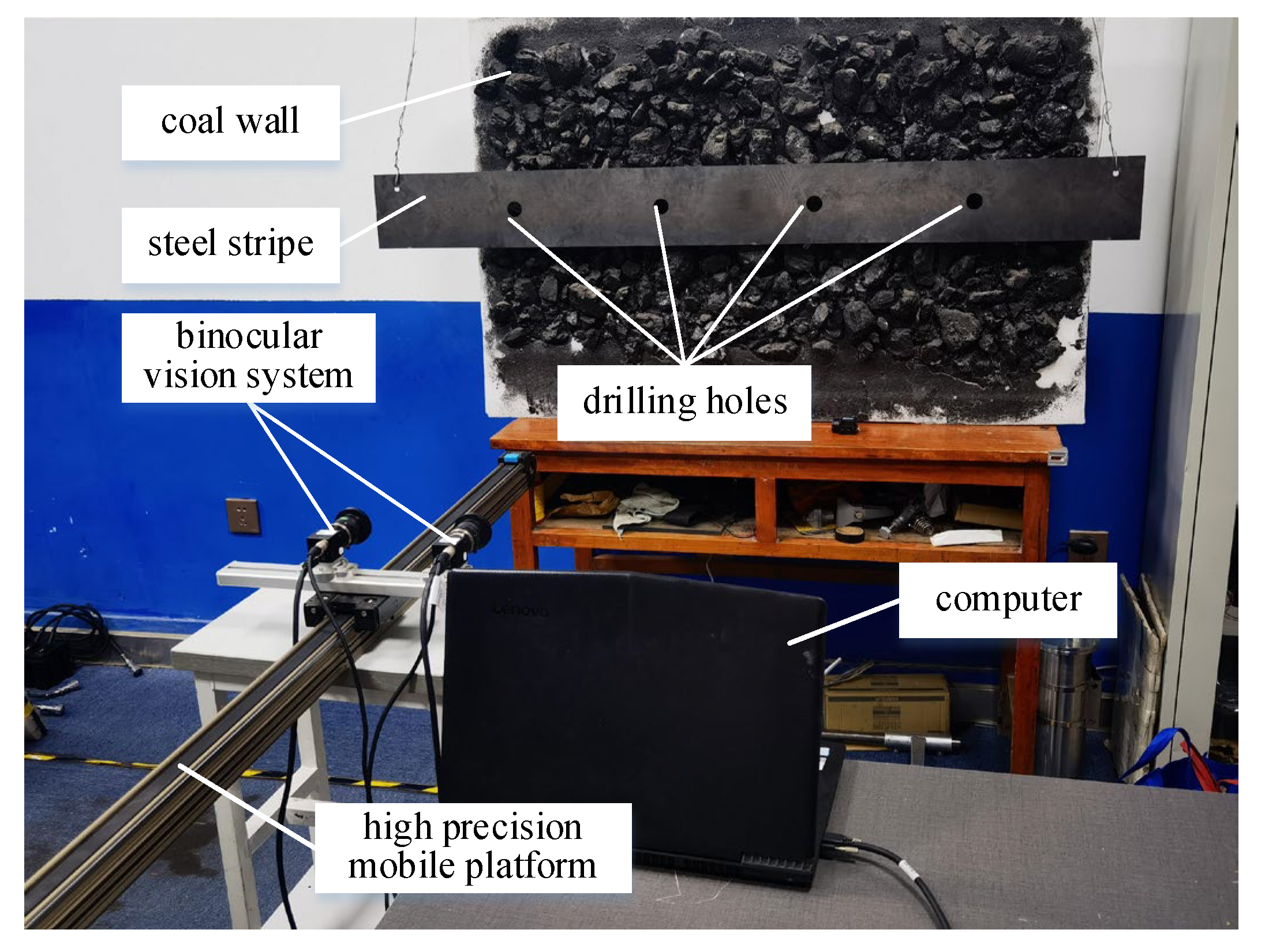
- The present paper proposes an approach for the spatial positioning of the anchor drilling center, which employs binocular stereo vision. A corresponding experimental platform for anchor drilling positioning is also introduced. The proposed method is shown to outperform the conventional manual technique in terms of the accuracy and stability of positioning, as demonstrated by the experimental results. The method also exhibits a 60% increase in the roof support speed.
- (2)
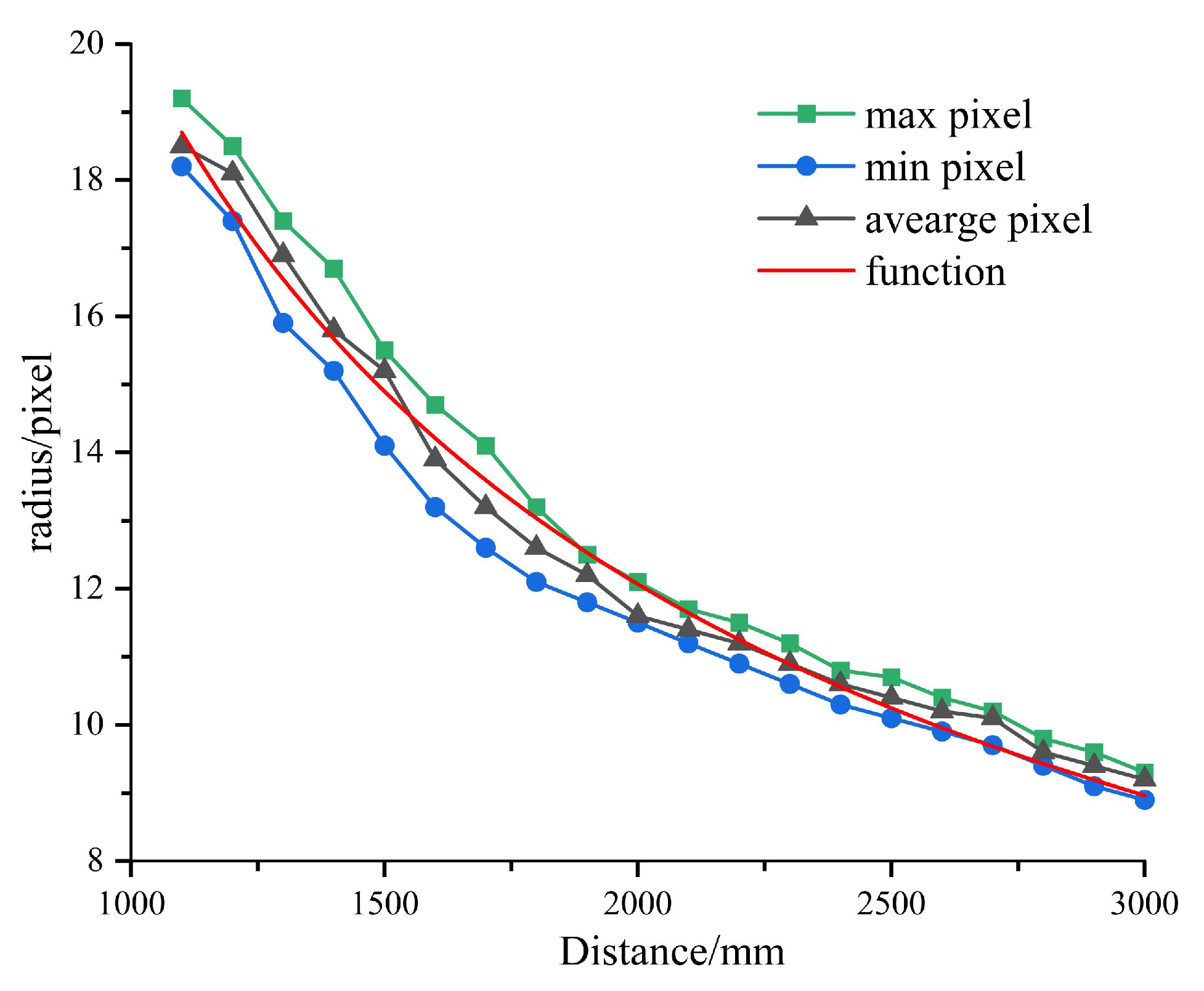
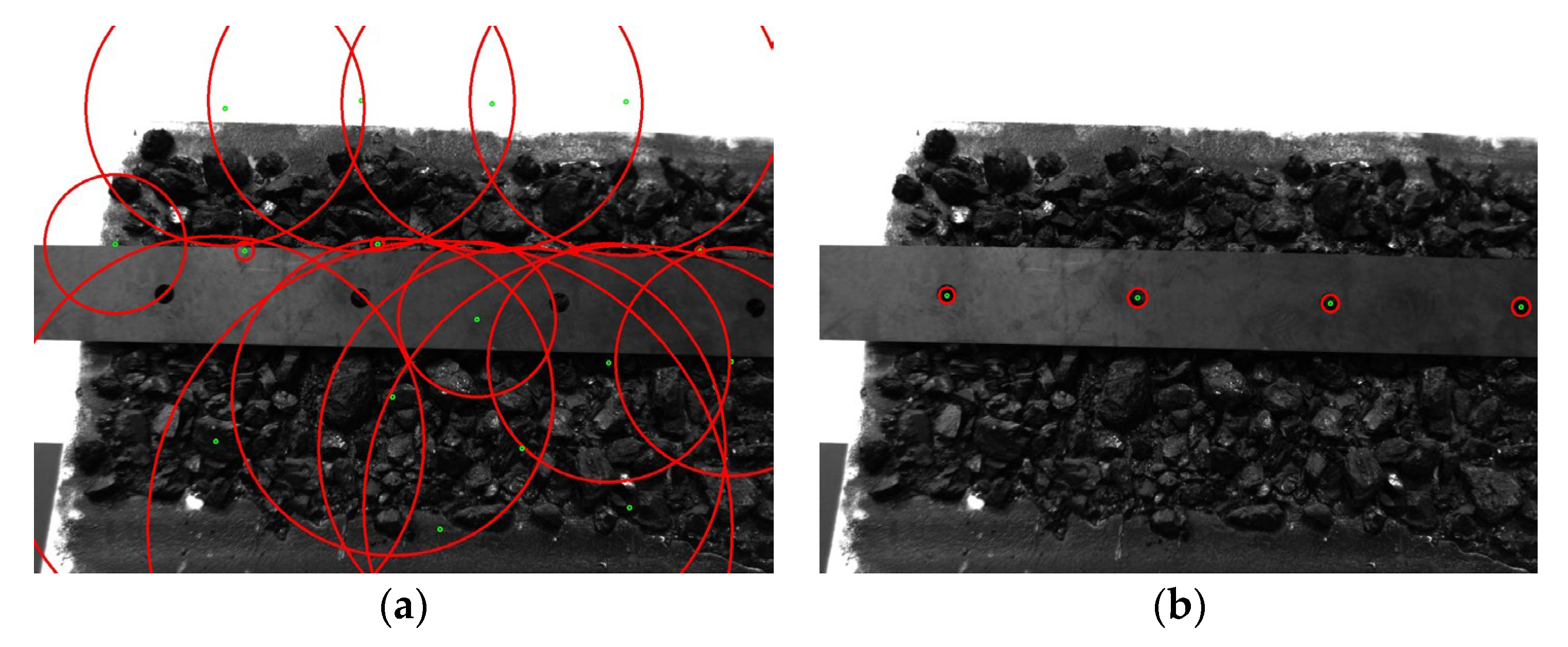
- A circle detection method based on the parameter-adaptive Hough transform is introduced, and a functional relationship between the size of the circular hole in the image and the actual distance is established. The Hough circle detection function’s maximum and minimum radii are adaptively adjusted to enable the accurate identification and segmentation of the anchor hole’s circular contour.
- (3)
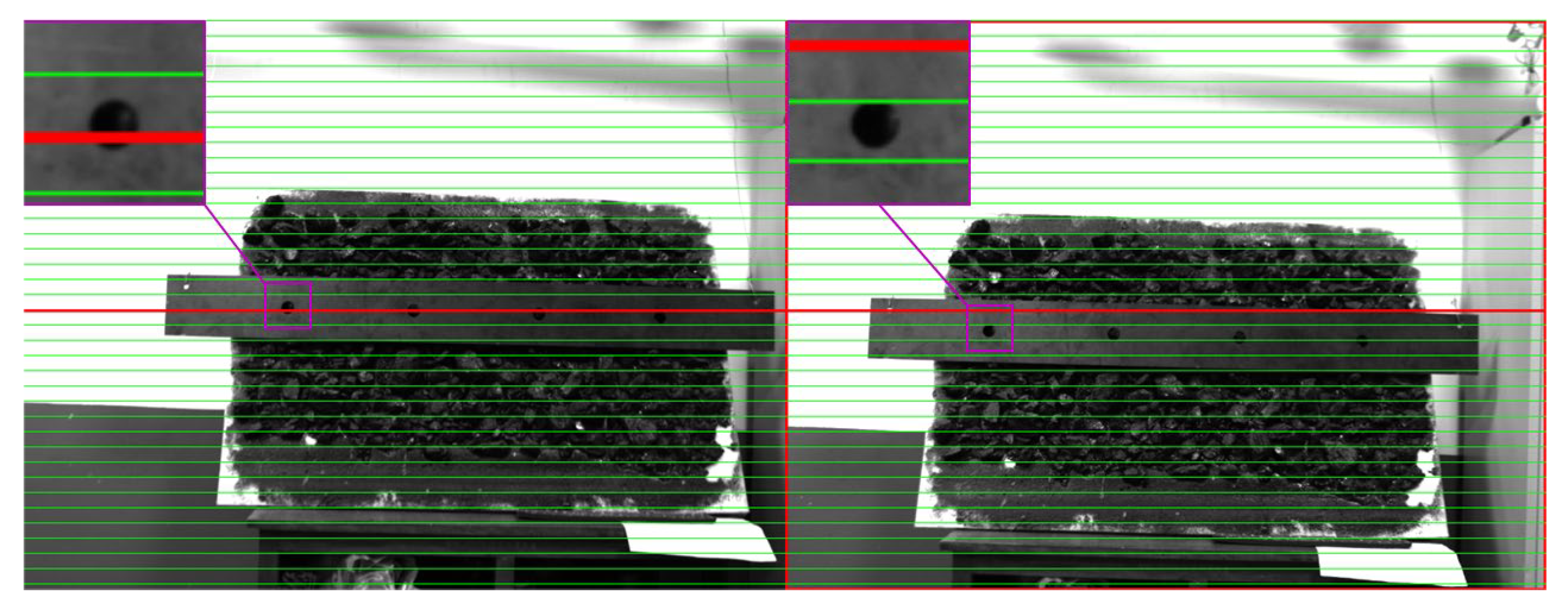
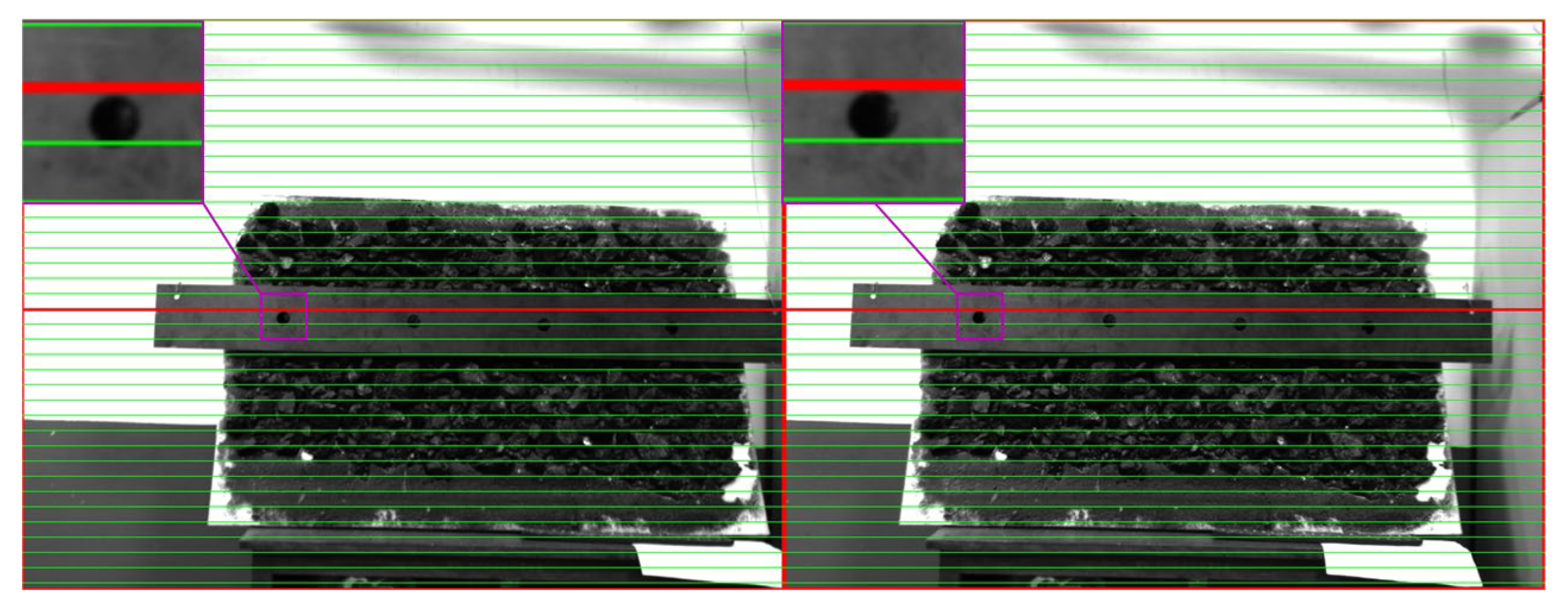
- A stereo matching method is developed by leveraging the slope of the straight line where the contour of the anchor hole is located and geometric constraints during stereo matching. This approach enables rapid matching of the anchor hole even under conditions of weak texture.
2. Anchor Drilling Robot and Supporting Process
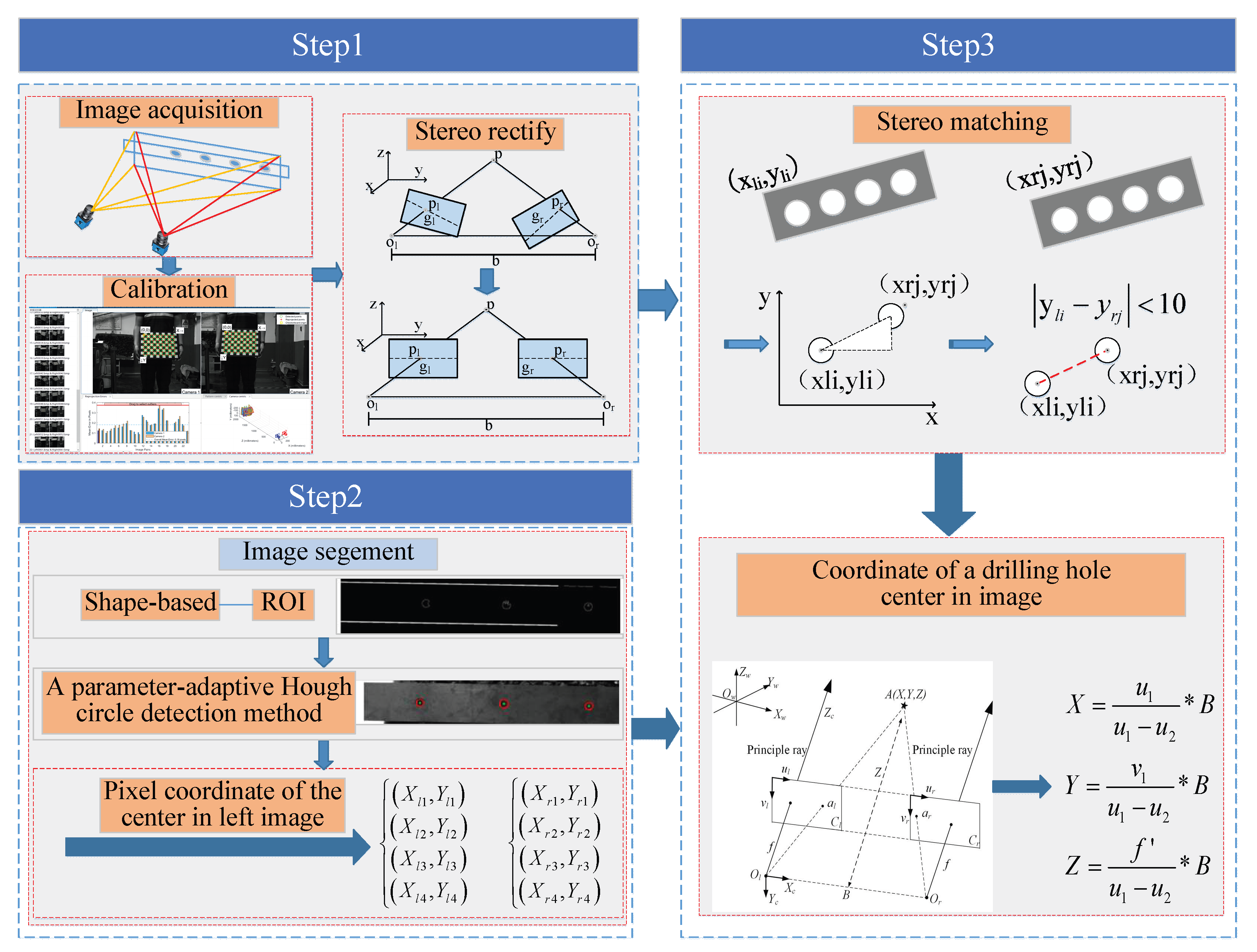
2.1. Flowchart of Binocular Vision Positioning Algorithm
2.2. Calibration of Cameras and Stereo Rectification of Images
3. Locating Anchor Drilling Holes Based on Binocular Vision
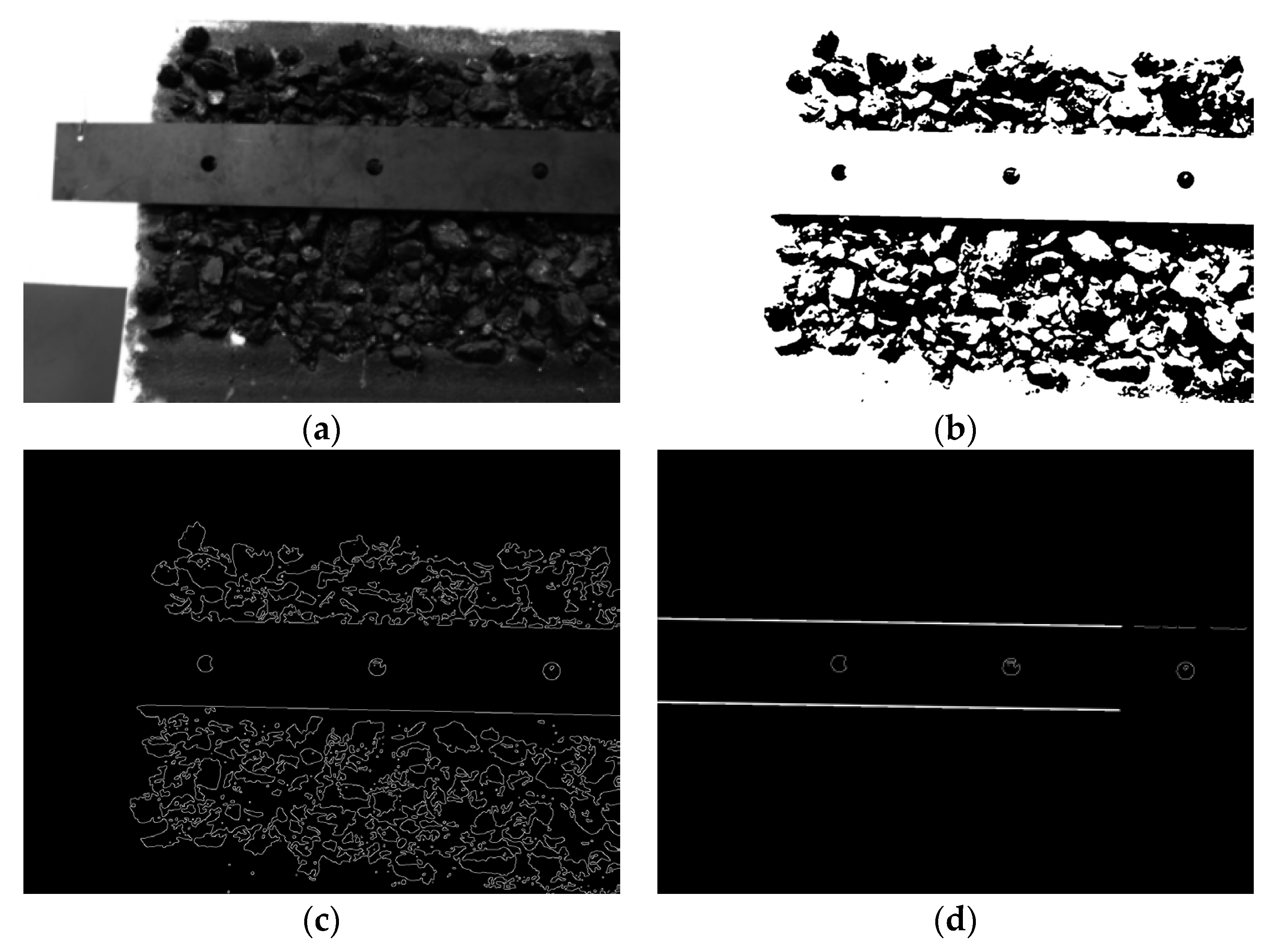
3.1. Detection Method of Anchor Drilling Holes Based on Adaptive Parameter Hough Transformation
3.1.1. Constructing the Prediction Model
3.1.2. Calculating the Distance
3.1.3. Additional Geometric Constraints
3.2. Matching Method for Segmented Drilling Holes
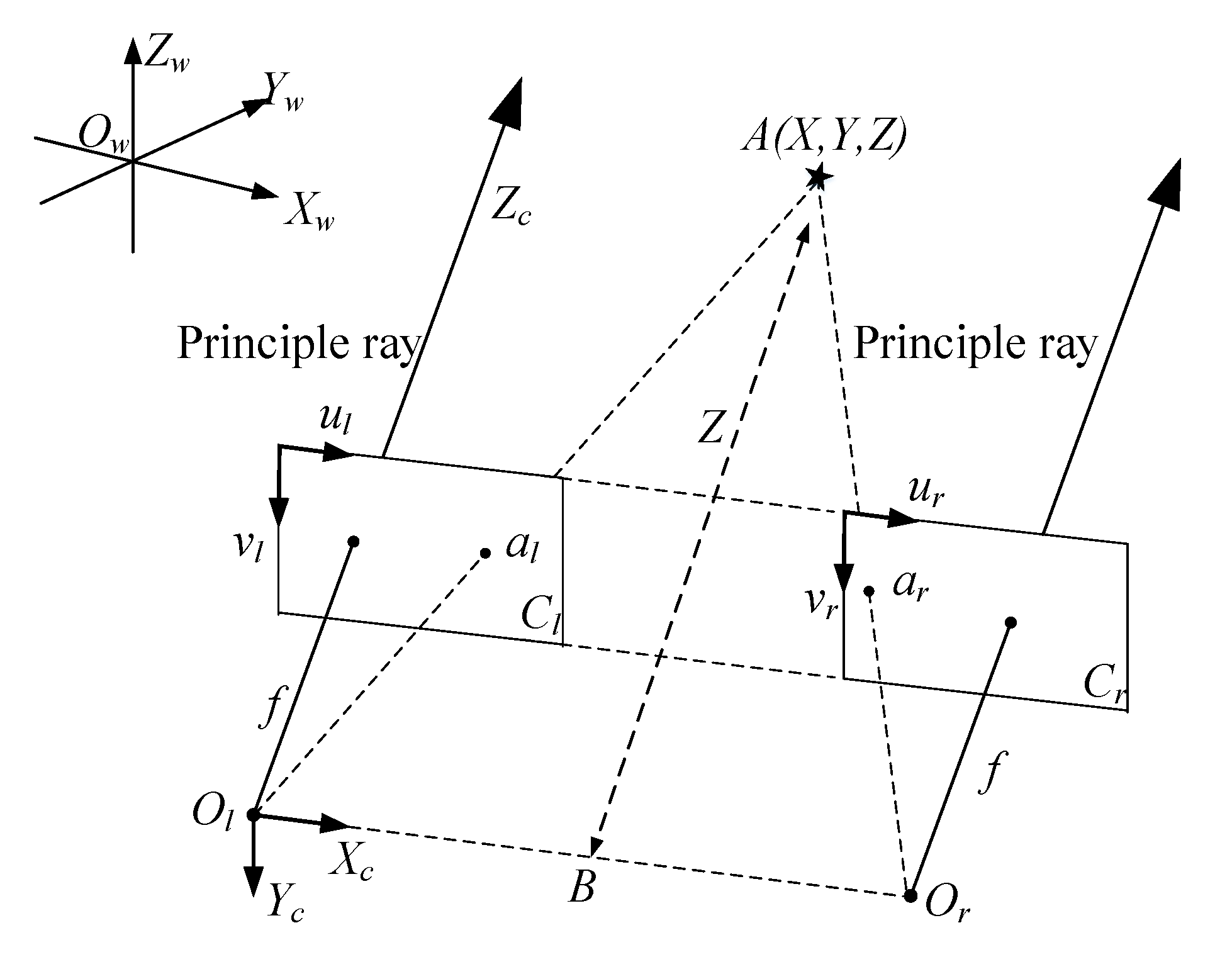
3.3. Calculating the Center Coordinates of Anchor Drilling Holes
4. Experiment and Results
4.1. Identifying Anchor Drilling Holes at Different Distances
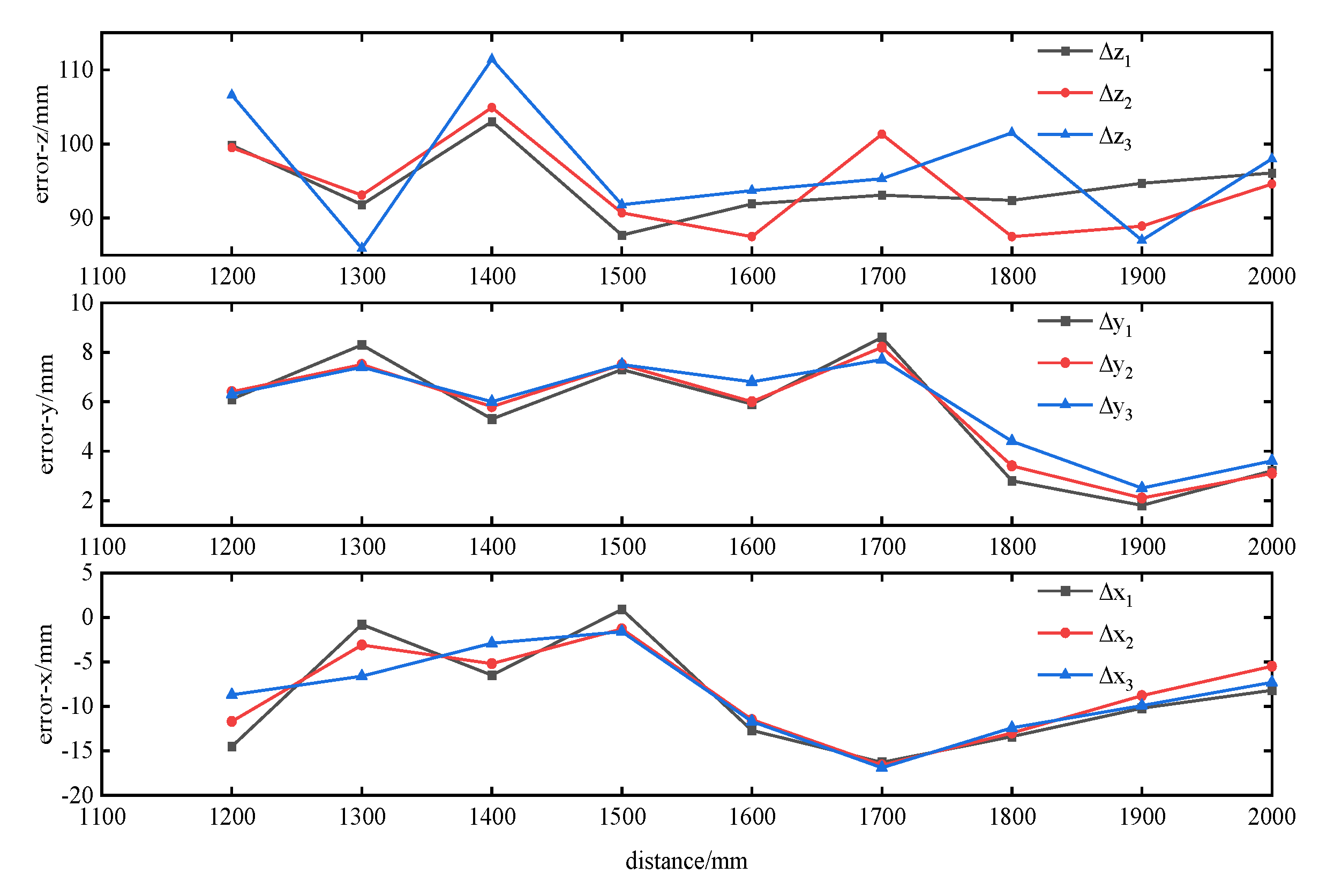
4.2. Localization of Drilling Holes
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kang, H.P. Sixty years development and prospects of rock bolting technology for underground coal mine roadways in China. J. China Univ. Min. Technol. 2016, 45, 1071–1081. [Google Scholar]
- Wang, B.K. Current status and trend analysis of readway driving technology and equipment in coal mine. Coal Sci. Technol. 2020, 48, 1–11. [Google Scholar]
- Wang, H.; Wang, B.K.; Zhang, X.F.; Li, F.Q.; Du, C.Y. Key technology and engineering practice of intelligent rapid heading in coal mine. J. China Coal Soc. 2021, 46, 2068–2083. [Google Scholar]
- Wang, G.F. New technological progress of coal mine intelligence and its problems. Coal Sci. Technol. 2022, 50, 1–27. [Google Scholar]
- Wang, H.; Wang, J.L.; Zhang, X.F. Theory and technology of efficient roadway advance with driving and bolting integration. J. China Coal Soc. 2020, 45, 2021–2030. [Google Scholar]
- Tajduś, K.; Misa, R.; Sroka, A. Analysis of the surface horizontal displacement changes due to longwall panel advance. Int. J. Rock Mech. Min. 2018, 104, 119–125. [Google Scholar] [CrossRef]
- Luo, H.; Zhang, K.; Su, Y.; Zhong, K.; Li, Z.W.; Guo, J.; Guo, C. Monocular vision pose determination-based large rigid-body docking method. Measurement 2022, 204, 112049. [Google Scholar] [CrossRef]
- Gao, Q.Y.; Jin, Y.L.; Liu, Q.; Yan, P.; Zhang, H.Y.; Li, F.Y.; Wang, H. Monocular vision measurement technology applied in dynamic compaction ramming settlement monitoring. Measurement 2023, 216, 112941. [Google Scholar] [CrossRef]
- Li, J. Relative pose measurement of binocular vision based on feature circle. Optik 2019, 194, 163121. [Google Scholar] [CrossRef]
- Lv, J.; Shi, P.; Wan, Z.J.; Cheng, J.Y.; Xing, K.K.; Wang, M.L.; Gou, H. Research on a Real-Time Monitoring Method for the Three-Dimensional Straightness of a Scraper Conveyor Based on Binocular Vision. Mathematics 2022, 10, 3545. [Google Scholar] [CrossRef]
- Kim, S.; Fan, M.; Jung, S.; Ko, S. External Vehicle Positioning System Using Multiple Fish-Eye Surveillance Cameras for Indoor Parking Lots. IEEE Syst. J. 2021, 15, 5107–5118. [Google Scholar] [CrossRef]
- Siratanita, S.; Chamnongthai, K.; Muneyasu, M. A Method of Football-Offside Detection Using Multiple Cameras for an Automatic Linesman Assistance System. Wireless Pers. Commun. 2021, 118, 1883–1905. [Google Scholar] [CrossRef]
- Ma, C.; Yang, F.; Li, Y.; Jia, H.; Xie, X.; Gao, W. Deep Trajectory Post-Processing and Position Projection for Single & Multiple Camera Multiple Object Tracking. Int. J. Comput. Vision 2021, 129, 3255–3278. [Google Scholar]
- Zhang, C. Binocular Vision Navigation Method of Marine Garbage Cleaning Robot in Unknown Dynamic Scene. J. Coastal Res. 2020, 103, 864. [Google Scholar] [CrossRef]
- Deng, F.C.; Zhu, X.R.; He, C. Vision-Based Real-Time Traversable Region Detection for Mobile Robot in the Outdoors. Sensors 2017, 17, 2101. [Google Scholar] [CrossRef] [PubMed]
- Meng, Y.; Wu, Z.X.; Li, Y.T.; Chen, D.; Tan, M.; Yu, J.Z. Vision-Based Underwater Target Following Control of an Agile Robotic Manta with Flexible Pectoral Fins. IEEE Robot. Autom. Lett. 2023, 8, 2277–2284. [Google Scholar] [CrossRef]
- Zhao, D.D.; He, W.; Deng, L.; Wu, Y.H.; Xie, H.; Dai, J.J. Trajectory Tracking and Load Monitoring for Moving Vehicles on Bridge Based on Axle Position and Dual Camera Vision. Remote Sens. 2021, 13, 4868. [Google Scholar] [CrossRef]
- Yin, H.S.; Ma, Z.; Zhong, M.; Wu, K.; Wei, Y.T.; Guo, J.L.; Huang, B. SLAM-Based Self-Calibration of a Binocular Stereo Vision Rig in Real-Time. Sensors 2020, 20, 621. [Google Scholar] [CrossRef]
- Zhang, H.H.; Xie, C.; Toriya, H.; Shishido, H.; Kitahara, I. Vehicle Localization in a Completed City-Scale 3D Scene Using Aerial Images and an On-Board Stereo Camera. Remote Sens. 2023, 15, 3871. [Google Scholar] [CrossRef]
- Sheng, H.Y.; Wei, S.M.; Yu, X.I.; Tang, L. Research on Binocular Visual System of Robotic Arm Based on Improved SURF Algorithm. IEEE Sens. J. 2020, 20, 11849–11855. [Google Scholar] [CrossRef]
- Lyu, C.Y.; Li, P.; Wang, D.C.; Yang, S.S.; Lai, Y.P.; Sui, C.Y. High-Speed Optical 3D Measurement Sensor for Industrial Application. IEEE Sens. J. 2021, 21, 11253–11261. [Google Scholar] [CrossRef]
- Zhang, H.J.; Tang, C.H.; Sun, X.M.; Fu, L.S. A Refined Apple Binocular Positioning Method with Segmentation-Based Deep Learning for Robotic Picking. Agronomy 2023, 13, 1469. [Google Scholar] [CrossRef]
- Ye, L.; Duan, J.L.; Yang, Z.; Zou, X.G.; Chen, M.Y.; Zhang, S. Collision-free motion planning for the litchi-picking robot. Comput. Electron. Agric. 2021, 185, 106151. [Google Scholar] [CrossRef]
- Yang, W.J.; Zhang, X.H.; Ma, H.W.; Zhang, G.M. Infrared LEDs-Based Pose Estimation with Underground Camera Model for Boom-Type Roadheader in Coal Mining. IEEE Access 2019, 7, 33698–33712. [Google Scholar] [CrossRef]
- Cui, Y.M.; Liu, S.Y.; Yao, J.; Gu, C.C. Integrated Positioning System of Unmanned Automatic Vehicle in Coal Mines. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Wan, J.C.; Zhang, X.H.; Zhang, C.; Yang, W.J.; Lei, M.Y.; Du, Y.Y.; Dong, Z. Vision and Inertial Navigation Combined-Based Pose Measurement Method of Cantilever Roadheader. Sustainability 2023, 15, 4018. [Google Scholar] [CrossRef]
- Chen, H.Y.; Yang, W.; Ma, Y.; Tian, L.Y. Multi-sensor fusion method for roadheader pose detection. Mechatronics 2021, 80, 102669. [Google Scholar] [CrossRef]
- Zhang, Z.Y. A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Anal. 2000, 11, 1330–1334. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, Q.; Feng, S.J.; Tao, T.Y.; Asundi, A.; Zuo, C. A new microscopic telecentric stereo vision system—Calibration, rectification, and three-dimensional reconstruction. Opt. Lasers Eng. 2019, 113, 14–22. [Google Scholar] [CrossRef]
- Lin, G.C.; Tang, Y.C.; Zou, X.J.; Xiong, J.T.; Fang, Y.M. Color-, depth-, and shape-based 3D fruit detection. Precis. Agric. 2020, 21, 1–17. [Google Scholar] [CrossRef]
- Jabłoński, M.; Tylek, P.; Walczyk, J.; Tadeusiewicz, R.; Piłat, A. Colour-Based Binary Discrimination of Scarified Quercus robur Acorns under Varying Illumination. Sensors 2016, 16, 1319. [Google Scholar] [CrossRef] [PubMed]
- Aligholi, S.; Lashkaripour, G.R.; Khajavi, R.; Razmara, M. Automatic mineral identification using color tracking. Pattern Recogn. 2017, 65, 164–174. [Google Scholar] [CrossRef]
- Taniai, T.; Matsushita, Y.; Sato, Y.; Naemura, T. Continuous 3D Label Stereo Matching Using Local Expansion Moves. IEEE Trans. Pattern Anal. 2018, 40, 2725–2739. [Google Scholar] [CrossRef] [PubMed]
- Hong, P.N.; Ahn, C.W. Stereo Matching Methods for Imperfectly Rectified Stereo Images. Symmetry 2019, 11, 570. [Google Scholar] [CrossRef]
- Zhong, F.Q.; Quan, C.G. Stereo-rectification and homography-transform-based stereo matching methods for stereo digital image correlation. Measurement 2021, 173, 108635. [Google Scholar] [CrossRef]
- Ma, Y.P.; Li, Q.W.; Chu, L.L.; Zhou, Y.Q.; Xu, C. Real-Time Detection and Spatial Localization of Insulators for UAV Inspection Based on Binocular Stereo Vision. Remote Sens. 2021, 13, 230. [Google Scholar] [CrossRef]
- Li, J. Binocular vision measurement method for relative position and attitude based on dual-quaternion. J. Mod. Optic. 2017, 64, 1846–1853. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance (mm) | Number of Drilling Holes | Identified Drilling Holes (Initial Parameter) | Identified Drilling Holes (Adaptive Parameter) | Identification Rate (Adaptive Parameter) | Time (Initial Parameter) | Time (Adaptive Parameter) |
|---|---|---|---|---|---|---|
| 1100 | 18 | 32 | 18 | 100% | 693 ms | 658 ms |
| 1200 | 21 | 37 | 21 | 100% | 967 ms | 640 ms |
| 1300 | 21 | 85 | 21 | 100% | 1466 ms | 623 ms |
| 1400 | 21 | 103 | 21 | 100% | 2073 ms | 665 ms |
| 1500 | 21 | 121 | 21 | 100% | 2634 ms | 591 ms |
| 1600 | 24 | 38 | 24 | 100% | 654 ms | 607 ms |
| 1700 | 24 | 42 | 24 | 100% | 897 ms | 638 ms |
| 1800 | 24 | 77 | 24 | 100% | 1603 ms | 618 ms |
| 1900 | 24 | 95 | 21 | 87.5% | 2257 ms | 649 ms |
| 2000 | 24 | 31 | 21 | 87.5% | 896 ms | 604 ms |
| Distance (mm) | Drilling Holes | Pixel Coordinates of the Center of the Left Image | Pixel Coordinates of the Center of the Right Image | Spatial Coordinates | Spatial Distance between Two Adjacent Drilling Holes | Average Distance (mm) | Average Error of Distance (mm) |
|---|---|---|---|---|---|---|---|
| 1100 | 1 | (−249.5, −18.3) | (−434.5, −1.9) | (−203.3, −14.9, 1106.4) | / | 299.4 | 0.6 |
| 2 | (118.8, −10.8) | (−68.3, −11.6) | (95.7, −8.7, 1094.0) | l12(1100) = 299.4 | |||
| 3 | (493.1, −2.4) | (304.9, −2.4) | (394.9, −1.9, 1087.6) | l23(1100) = 299.4 | |||
| 4 | / | / | / | / | |||
| 1200 | 1 | (−245.2, −9.9) | (−414.9, −10.7) | (−217.8, −8.8, 1206.2) | / | 302.3 | 2.3 |
| 2 | (95.6, −2.6) | (−75.9, −3.6) | (84.0, −2.3, 1193.5) | l12(1200) = 302.3 | |||
| 3 | (439.2,5) | (267.8, 4.8) | (386.2, 4.4, 1194.2) | l23(1200) = 302.3 | |||
| 4 | / | (608.0, 12.9) | / | / | |||
| 1300 | 1 | (−228.7, −0.5) | (−386.4, −1.3) | (−218.6, −0.5, 1298.0) | / | 299.3 | 0.7 |
| 2 | (85.4, 5.5) | (−73.7, 4.6) | (80.9, 5.2, 1286.6) | l12(1300) = 299.8 | |||
| 3 | (402.7, 12.5) | (242.8, 11.8) | (379.6, 11.8, 1280.1) | l23(1300) = 298.8 | |||
| 4 | / | (557.0, 19.1) | / | / | |||
| 1400 | 1 | (−218.2, 4.6) | (−364.3, 3.6) | (−225.1, 4.8, 1401.0) | / | 301.2 | 1.2 |
| 2 | (73.9, 10.7) | (−73.2, 9.8) | (75.7, 11.0, 1391.5) | l12(1400) = 301.1 | |||
| 3 | (367.6, 17.4) | (220.5, 16.6) | (376.7, 17.8, 1391.5) | l23(1400) = 301.3 | |||
| 4 | / | (510.4, 23.1) | / | / | |||
| 1500 | 1 | (−204.5, 11.0) | (−342.0, 10.2) | (−224.18, 12.1, 1488.7) | / | 299.8 | 0.2 |
| 2 | (68.2, 16.9) | (−69.9, 16.0) | (74.4, 18.5, 1482.2) | l12(1500) = 298.8 | |||
| 3 | (343.4, 23.4) | (205.4, 22.4) | (375.1, 25.3, 1483.3) | l23(1500) = 300.7 | |||
| 4 | / | (477.2, 29.3) | / | / | |||
| 1600 | 1 | (−203.5, 15.5) | (−333.0, 14.6) | (−236.9, 18.0, 1580.6) | / | 299.0 | 1.0 |
| 2 | (54.4, 21.2) | (−76.0, 20.0) | (62.9, 24.5, 1569.7) | l12(1600) = 300.0 | |||
| 3 | (312.9, 27.6) | (183.1, 26.8) | (363.4, 32.1, 1577.0) | l23(1600) = 300.7 | |||
| 4 | (566.9, 29.7) | (439.0, 33.0) | (668.1, 35.0, 1600.4) | l34(1600) = 305.6 | |||
| 1700 | 1 | (−205.4, 21.6) | (−327.7, 20.6) | (−253.2, 26.6, 1673.7) | / | 298.8 | 1.2 |
| 2 | (37.6, 26.6) | (−84.9, 25.5) | (46.3, 32.7, 1671.0) | l12(1700) = 299.5 | |||
| 3 | (281.4, 32.3) | (159.0, 31.3) | (346.5, 39.8, 1672.3) | l23(1700) = 300.4 | |||
| 4 | (521.2, 37.2) | (399.0, 36.9) | (642.9, 45.9, 1675.1) | l34(1700) = 296.5 | |||
| 1800 | 1 | (−205.0, 22.6) | (−320.9, 22.0) | (−266.6, 29.4, 1766.1) | / | 299.5 | 0.5 |
| 2 | (25.7, 27.9) | (−90.7, 27.4) | (33.3, 36.1, 1758.5) | l12(1800) = 300.1 | |||
| 3 | (255.8, 33.8) | (140.4, 32.8) | (334.1, 44.2, 1773.8) | l23(1800) = 301.3 | |||
| 4 | (482.3, 39.3) | (367.1, 38.3) | (631.1, 51.4, 1776.8) | l34(1800) = 297.0 | |||
| 1900 | 1 | (−202.0, 22.8) | (−312.0, 21.6) | (−276.8, 31.2, 1860.8) | / | 300.9 | 0.9 |
| 2 | (18.0, 28.1) | (−92.8, 27.2) | (24.5, 38.2, 1847.4) | l12(1900) = 301.7 | |||
| 3 | (236.6, 34.1) | (126.6, 32.8) | (324.2, 46.7, 1860.8) | l23(1900) = 300.1 | |||
| 4 | (452.0, 39.1) | / | / | / | |||
| 2000 | 1 | (−197.8, 23.9) | (−302.4, 20.8) | (−285.0, 34.4, 1956.9) | 301.5 | 1.5 | |
| 2 | (13.3, 28.9) | (−92.1, 26.8) | (19.0, 41.3, 1942.0) | l12(2000) = 304.4 | |||
| 3 | (219.7, 34.9) | (115.2, 30.8) | (316.9, 50.3, 1958.8) | l23(2000) = 298.5 | |||
| 4 | (423.8, 39.6) | / | / | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, M.; Zhang, X.; Dong, Z.; Wan, J.; Zhang, C.; Zhang, G. Locating Anchor Drilling Holes Based on Binocular Vision in Coal Mine Roadways. Mathematics 2023, 11, 4365. https://doi.org/10.3390/math11204365
Lei M, Zhang X, Dong Z, Wan J, Zhang C, Zhang G. Locating Anchor Drilling Holes Based on Binocular Vision in Coal Mine Roadways. Mathematics. 2023; 11(20):4365. https://doi.org/10.3390/math11204365
Chicago/Turabian StyleLei, Mengyu, Xuhui Zhang, Zheng Dong, Jicheng Wan, Chao Zhang, and Guangming Zhang. 2023. "Locating Anchor Drilling Holes Based on Binocular Vision in Coal Mine Roadways" Mathematics 11, no. 20: 4365. https://doi.org/10.3390/math11204365