

A Comprehensive Method to Evaluate Ride Comfort of Autonomous Vehicles under Typical Braking Scenarios: Testing, Simulation and Analysis
 , and
, and 
Abstract
:1. Introduction
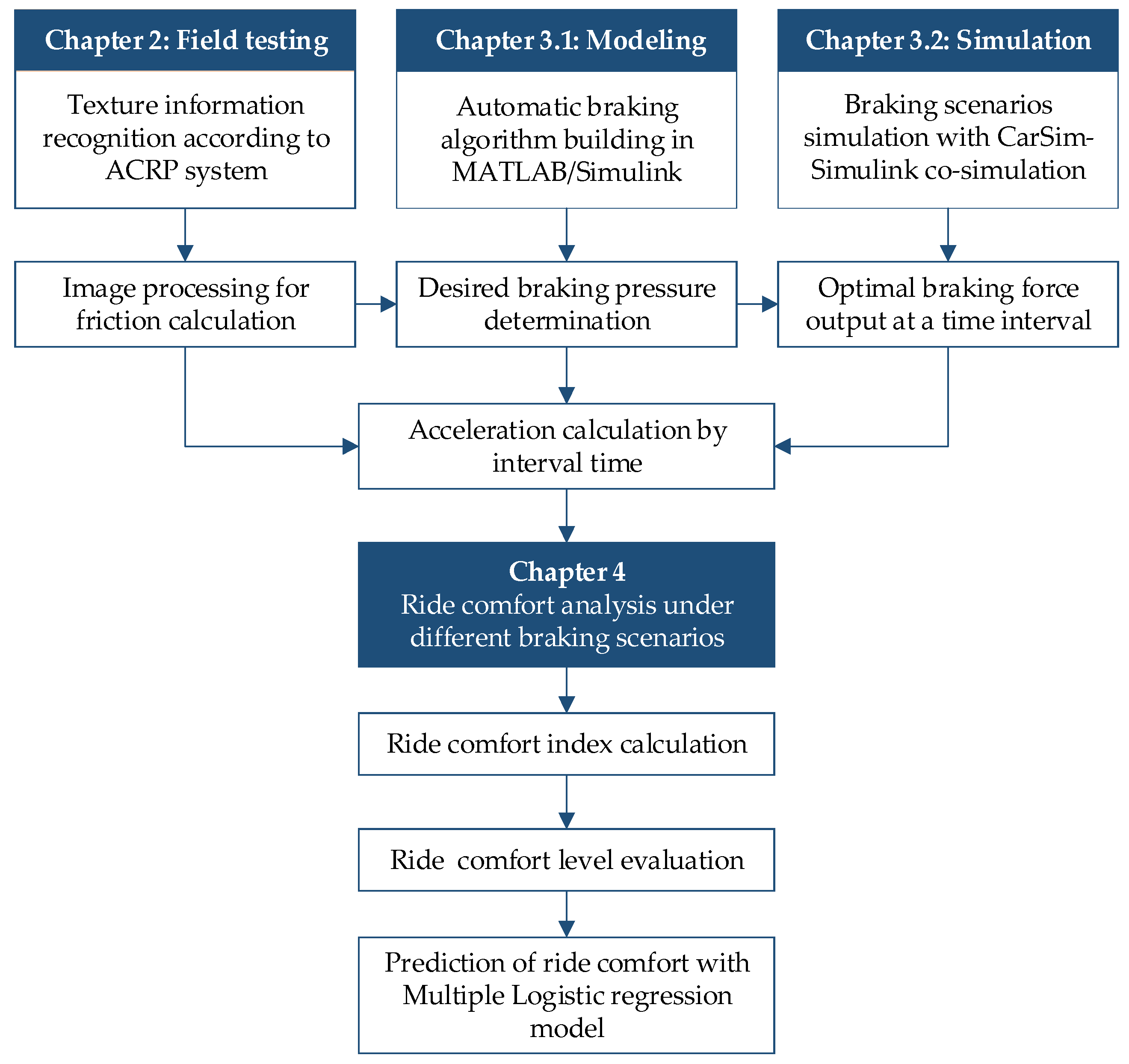
2. Field Testing
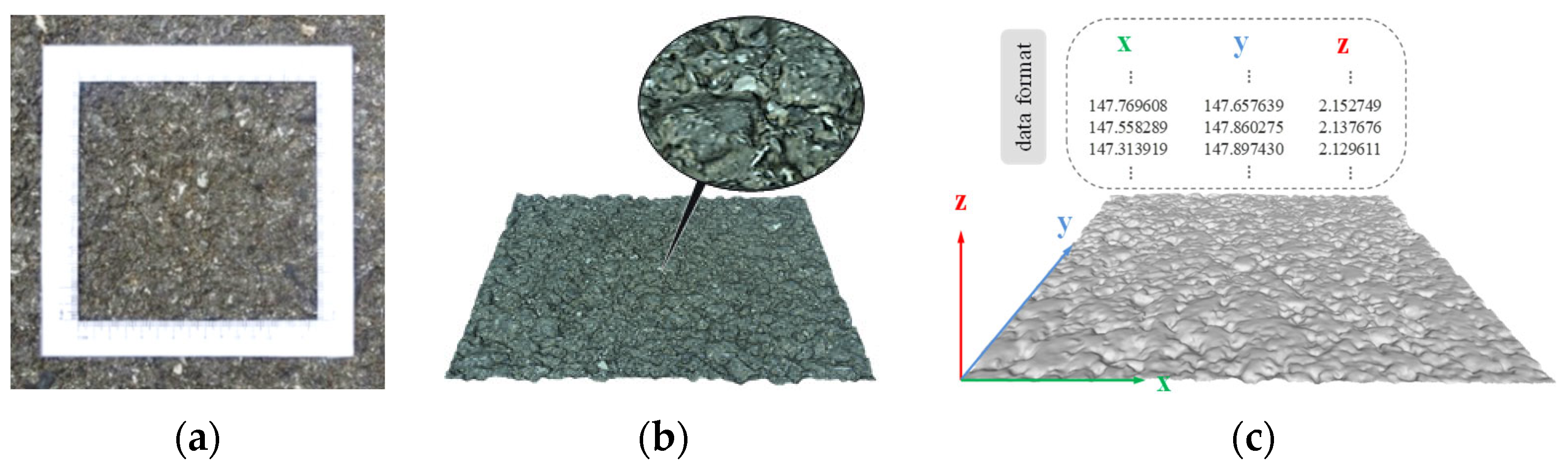
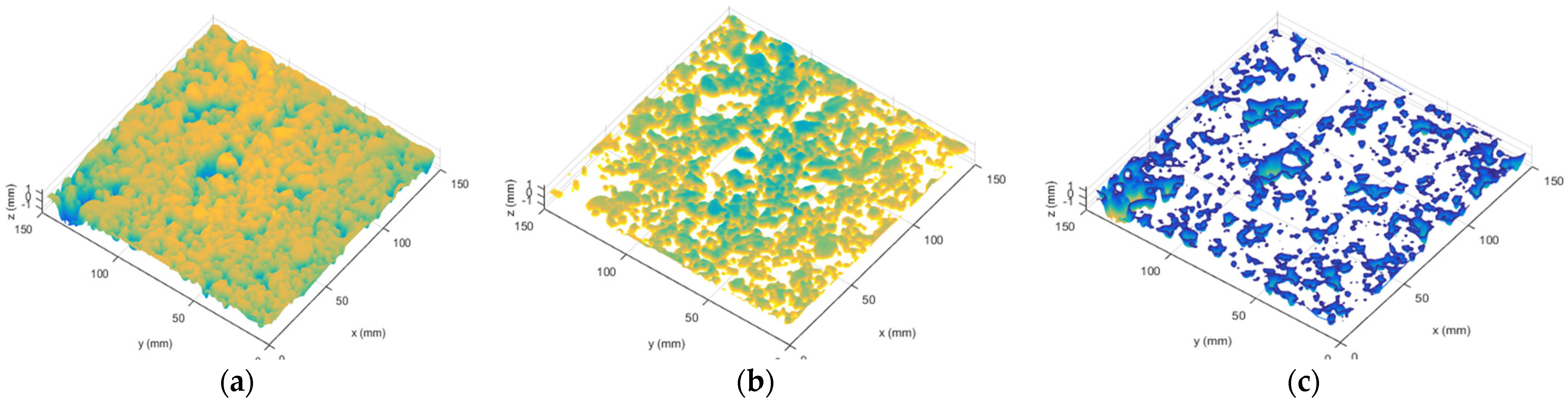
2.1. Field Testing of Road Surface Texture Information
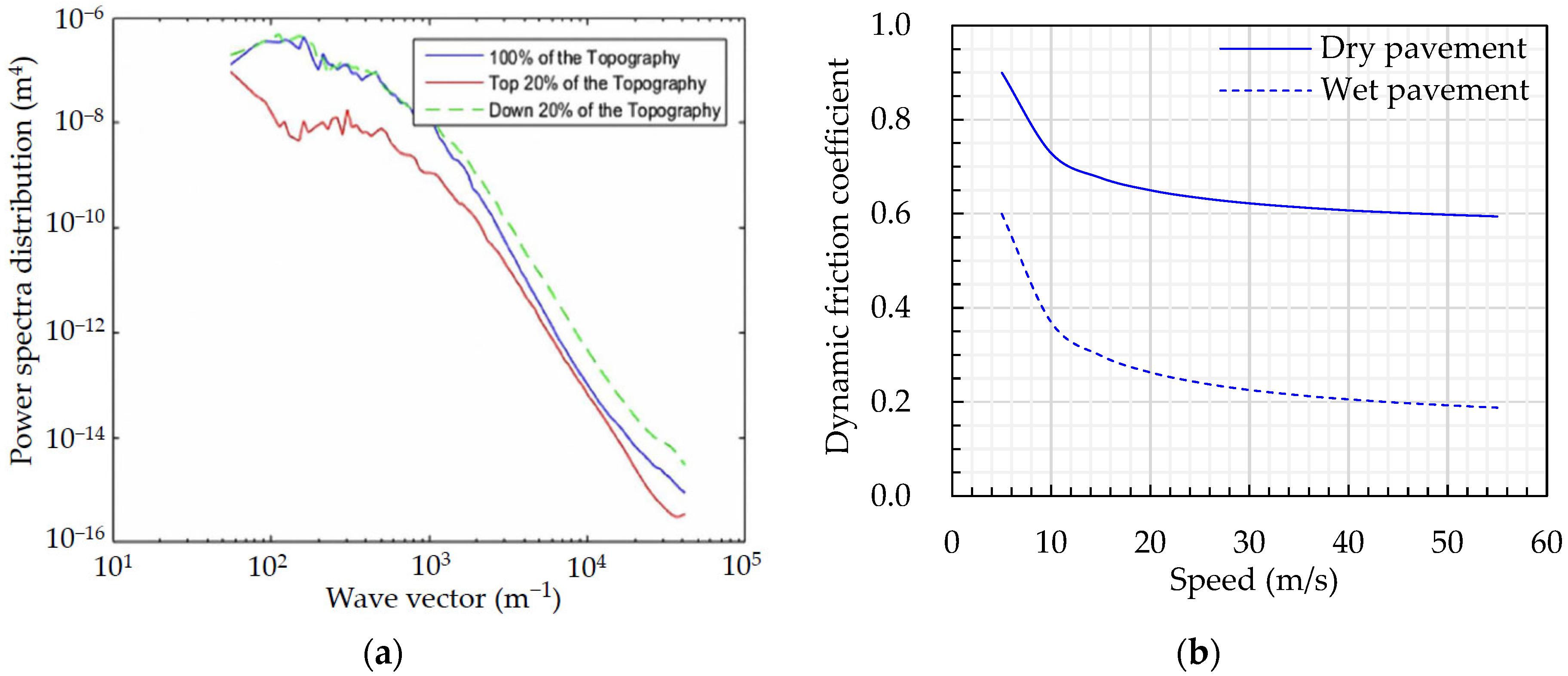
2.2. Calculation of the Dynamic Friction Coefficient
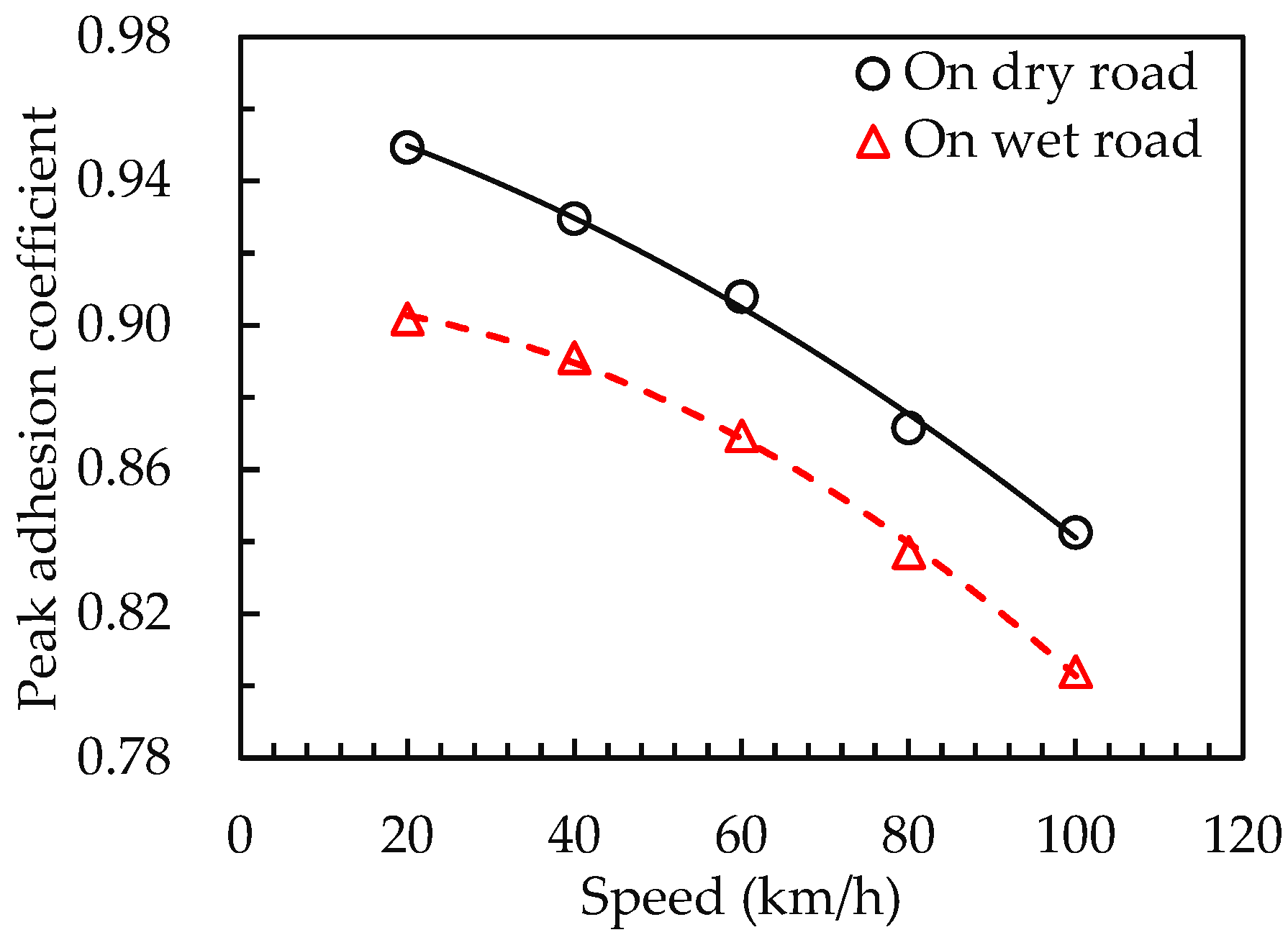
2.3. Peak adhesion Coefficient of the Asphalt Pavement
3. Braking Model
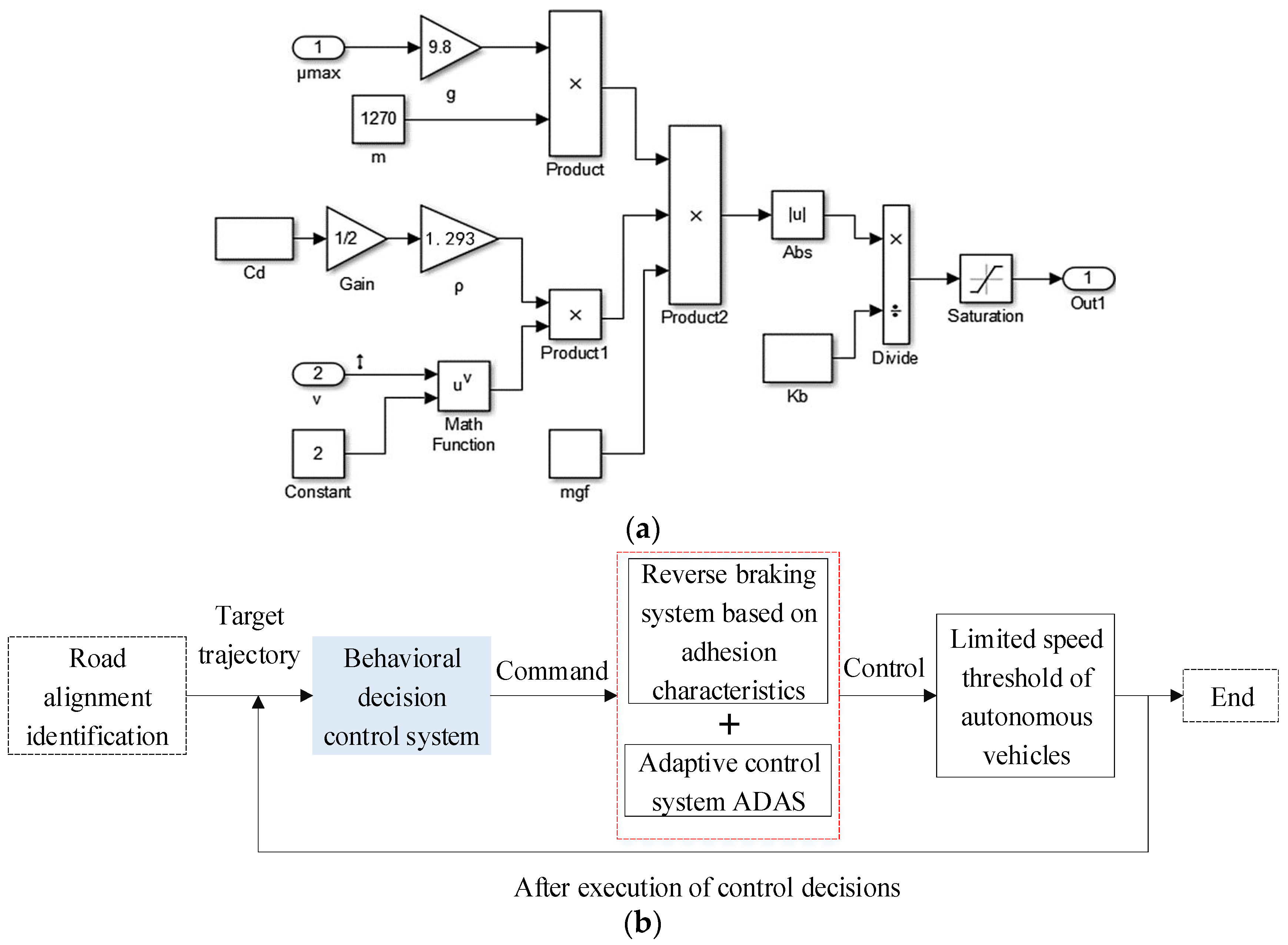
3.1. Braking Control Model
3.1.1. Braking Algorithm
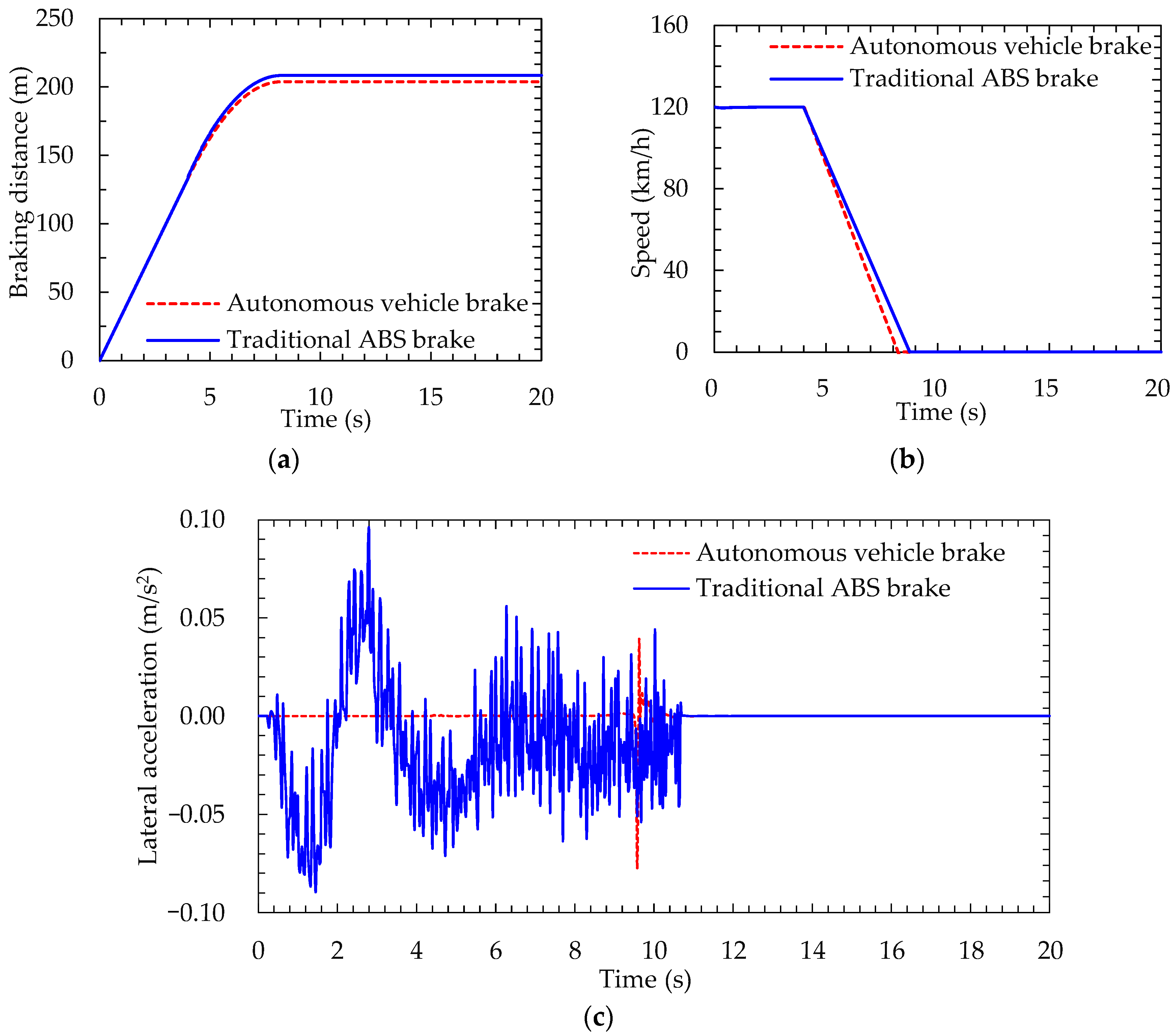
3.1.2. Validation of the Braking Model
3.2. Modeling Parameter Settings
4. Braking Scenario Simulations
4.1. Emergency Braking on a Straight Road
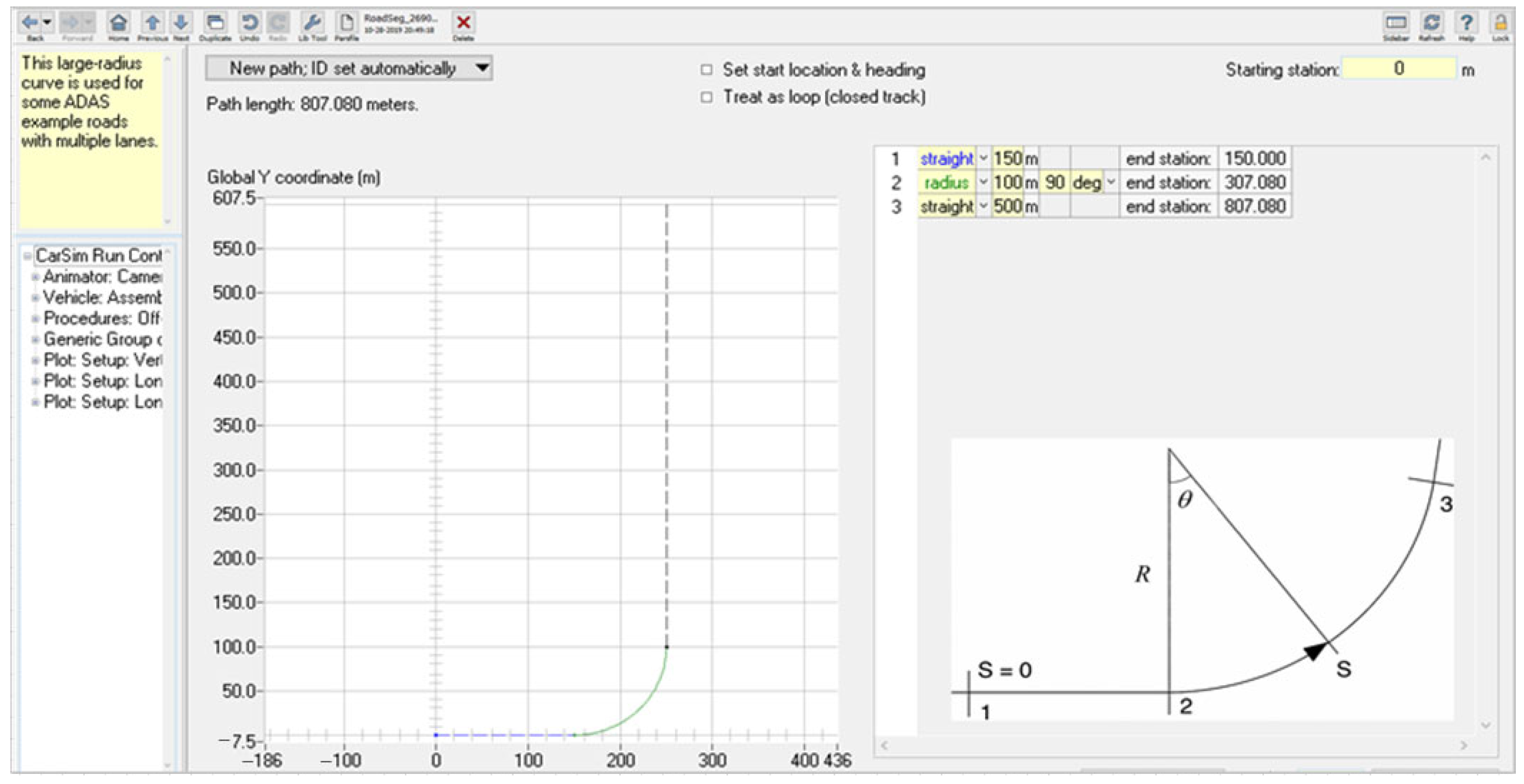
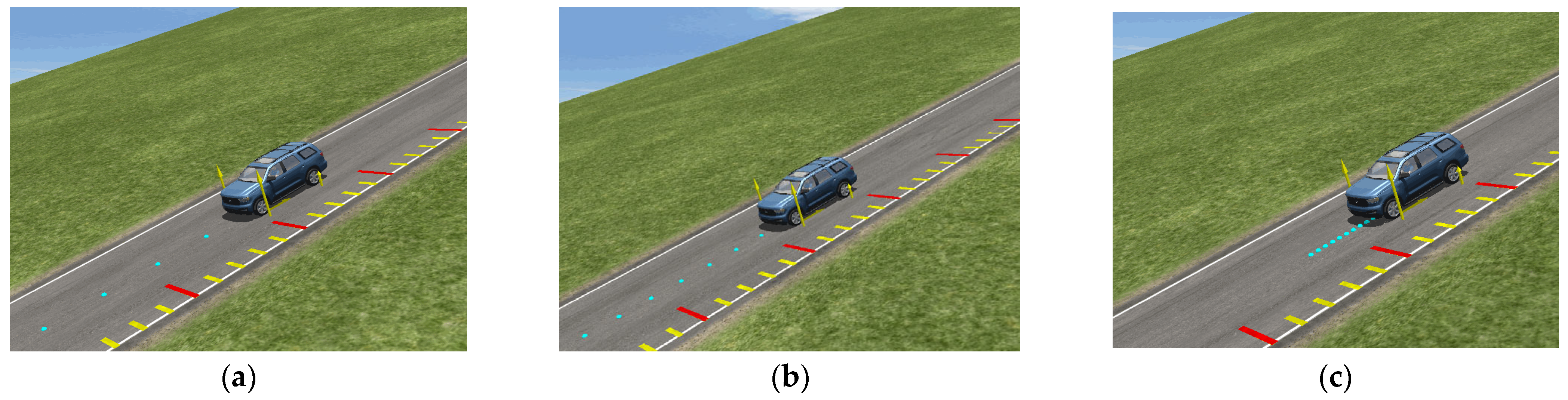
4.2. Steering Braking on a Curved Section
4.3. Braking Simulation on a Sloped Road
5. Results and Discussion
5.1. Evaluation Index of the Braking Comfort
5.1.1. Calculation of Braking Comfort Index
5.1.2. Evaluation of Ride Comfort Levels
- The comfort index CI of an autonomous vehicle on a dry road during the period of constant speed (in the time domain of Δt1~Δt4) was within the range of 0–0.315, indicating that straight travel at a certain safe speed with real-time perception of the surrounding environment produced ride comfort that was suitable for the passenger’s subjective feelings and provided a good riding experience. Due to the low coefficient of adhesion on the wet road, the braking time of the vehicle under the same braking pressure and same initial speed increased, and the braking distance increased in turn. Compared with the dry road condition, braking comfort was poor and the passengers were prone to fatigue.
- When the braking pressure was 2 MPa, the braking time was extended in the case of an initial speed of 120 km/h. During the period of 5–19 s, the comfort level was 4, meaning that the passengers felt slightly uncomfortable but the comfort was within an acceptable range. However, the longer braking time caused the ABS to start frequently and cause passenger fatigue, and there was a high probability of collision and rear-end collision in the emergency braking environment.
- When the braking pressure changed from 4 MPa to 10 MPa, the comfort level was 5 during the constant speed driving phase. During the brake deceleration process, the comfort level appeared in the range of level 2 (brake pressure was equal to 4 MPa) or level 1~level 2 (brake pressure was more than 4 MPa), indicating that the vibration frequency of the vehicle during braking was large, and the uneven distribution of the vertical pressure of the left and right tires resulted in a large fluctuation.
- The best curve radius in terms of comfort was 200 m at a speed of 100 km/h, and the CI index was less than 4. This meant that the comfort met the passenger requirement, and the advantage of the AV was demonstrated.
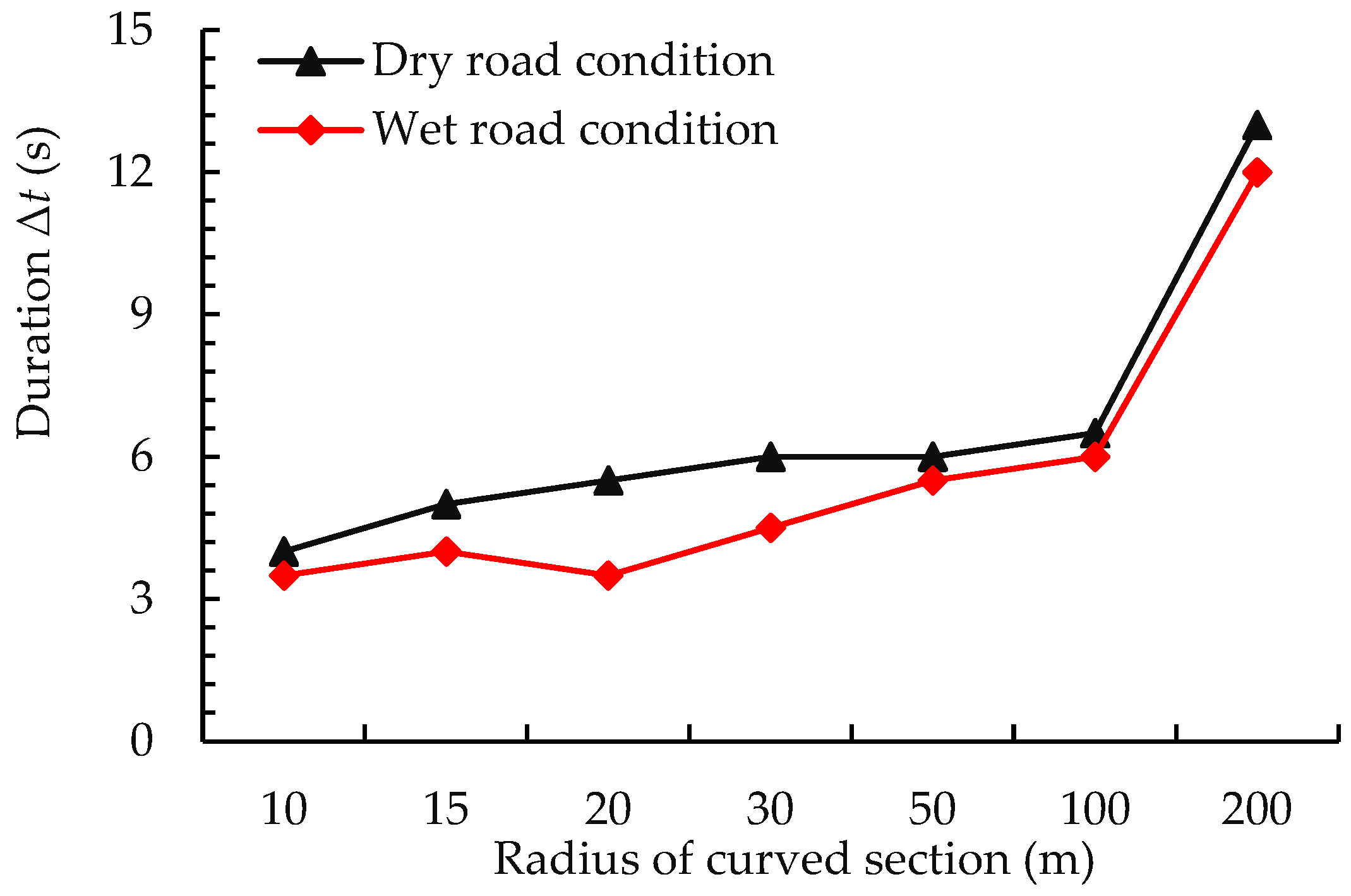
- Compared with the wet road condition, a dry road could provide greater lateral friction because of the good adhesion, which mostly counteracted the centrifugal force generated by the vehicle on the curved section. Thus, the ride comfort during the steering process was greatly improved, and thus, the duration of the “curve balance state” on the dry road lasted longer, i.e., an increase of approximately 57.14% compared with the wet road condition, as shown in Figure 14. In addition, the “curve balance state” was defined as the duration of ride comfort level 5 during the steering braking process.
- As the radius of the curve increased, the braking comfort of the vehicle during cornering was relatively good. This was because the curve length increased with the increased radius of the curved section. The autonomous vehicle used an adaptive control system to navigate the curved segment at the best speed; for curves with a bigger radius, a speed buffering process was in place. Road alignment design might be based on the comfort evaluation results.
- When the slope gradient i = 10° and the initial speed was 80 km/h, or when the slope gradient i = 20° and the initial speed was 60 km/h, the ride comfort level was not greater than 3, indicating that the road slope gradient had a significant effect on the initial braking speed and comfort level. Compared with the slope gradient of 10°, the ride comfort was poor for a slope with a gradient of 20°, which was consistent with the vehicle braking dynamics characteristics.
- Under the conditions of a small slope gradient and low initial speed (such as i = 10° and v0 = 60 km/h) or a large slope gradient and high initial speed (such as i = 20° and v0 = 80 km/h), after perceiving obstacles ahead, because the frictional force on the road surface was insufficient to counteract the inertial force generated by the vehicle body mass, the vehicle started to drive at a uniform acceleration (a = g*sin(i)). Then, the safe braking distance was sensed dynamically and the automatic control mode was activated to adjust the wheel cylinder pressure. Braking deceleration started at the fifth second. In order to prevent the vehicle from rolling over on the sloped road, the vertical pressures of the front and rear tires were automatically controlled to achieve a stable state. At this stage, the vehicle generated a large vibration frequency, and thus, the comfort was poor, with an evaluation level of 2.0.
- As the vehicle mass and the position of the mass center were the same, the braking process on a slope mainly depended on the comprehensive effect of the slope and the initial speed. In a similar braking environment, an AV needs to automatically adjust the wheel cylinder braking pressure according to the initial speed and road slope gradient to adapt to the road alignment to achieve a safe braking behavior.
5.2. Prediction of the Ride Comfort
5.2.1. Multiple Logistic Regression Model
5.2.2. Prediction Model of the Ride Comfort
- Emergency braking on a wet road:
- Steering braking on a curved section:
- (a)
- On a dry road:
- (b)
- On a wet road:
- Braking on a sloped road:
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiong, Z.; Sheng, H.; Rong, W.; Cooper, D.E. Intelligent Transportation Systems for Smart Cities: A Progress Review. Sci. China Inf. Sci. 2012, 55, 2908–2914. [Google Scholar] [CrossRef] [Green Version]
- Anderson, J.; Kalra, N.; Stanley, K.; Sorensen, P.; Samaras, C.; Oluwatola, T. Autonomous Vehicle Technology: How to Best Realize Its Social Benefits; RAND Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Karen, İ.; Kaya, N.; Öztürk, F.; Korkmaz, İ.; Yıldızhan, M.; Yurttaş, A. A Design Tool to Evaluate the Vehicle Ride Comfort Characteristics: Modeling, Physical Testing, and Analysis. Int. J. Adv. Manuf. Technol. 2012, 60, 755–763. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of Connected and Autonomous Vehicles on Traffic Flow Stability and Throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Wang, F.; Sagawa, K.; Ishihara, T.; Inooka, H. An Automobile Driver Assistance System for Improving Passenger Ride Comfort. IEEJ Trans. IA 2002, 122, 730–735. [Google Scholar] [CrossRef] [Green Version]
- Tang, A.H.; Tian, J.P.; Liao, Y.H. Analysis for Ride Comfort Evaluation of Passenger Car Traveling on Roads with Generalized Road Profiles and Conventional Speeds. AMR 2014, 926–930, 877–880. [Google Scholar] [CrossRef]
- Kumar, V.; Rastogi, V.; Pathak, P. Simulation for Whole-Body Vibration to Assess Ride Comfort of a Low–Medium Speed Railway Vehicle. Simulation 2017, 93, 225–236. [Google Scholar] [CrossRef]
- Genser, A.; Spielhofer, R.; Nitsche, P.; Kouvelas, A. Ride comfort assessment for automated vehicles utilizing a road surface model and Monte Carlo simulations. Comput.-Aided Civ. Infrastruct. Eng. 2022, 37, 1316–1334. [Google Scholar] [CrossRef]
- He, D.; He, W.; Song, X. Efficient predictive cruise control of autonomous vehicles with improving ride comfort and safety. Meas. Control. 2020, 53, 18–28. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Su, Y.; Fu, R.; Yuan, W. Influence of Lane-changing Maneuvers on Passenger Comfort of Intelligent Vehicles. China J. Highw. Transp. 2022, 35, 221–230. [Google Scholar]
- Du, Y.; Chen, J.; Zhao, C.; Liao, F.; Zhu, M. A hierarchical framework for improving ride comfort of autonomous vehicles via deep reinforcement learning with external knowledge. Comput.-Aided Civ. Infrastruct. Eng. 2022, 33, 79–94. [Google Scholar] [CrossRef]
- Winkel, K.N.D.; Irmak, T.; Happee, R.; Shyrokau, B. Standards for passenger comfort in automated vehicles: Acceleration and jerk. Appl. Ergon. 2023, 106, 103881. [Google Scholar] [CrossRef] [PubMed]
- Landersheim, V.; Jurisch, M.; Bartolozzi, R.; Stoll, G.; Möller, R.; Atzrodt, H. Simulation-Based Testing of Subsystems for Autonomous Vehicles at the Example of an Active Suspension Control System. Electronics 2022, 11, 1469. [Google Scholar] [CrossRef]
- Li, N.; Jiang, J.; Sun, F.; Ye, M. Study on the Influence of Suspension Parameters on Longitudinal Impact Comfort. Secur. Commun. Netw. 2022, 2022, 7749029. [Google Scholar] [CrossRef]
- Han, M.Y.; Choi, H.Y.; Hirao, A. Modeling of vehicle seat in lumped network model for ride comfort simulation. J. Mech. Sci. Technol. 2021, 35, 231–236. [Google Scholar] [CrossRef]
- Yordanov, V.; Uszynski, O.; Friederichs, J.; Latfullin, R.; Eckstein, L.; Wiessalla, J. Early Assessment of Tire Related Ride Comfort Based on Component and System Level Measurements. In 12th International Munich Chassis Symposium; Springer Vieweg: Berlin/Heidelberg, Germany, 2021; pp. 603–623. [Google Scholar]
- Jabeen, S.D. Vehicle Vibration and Passengers Comfort. In Advances in Computational Intelligence; Sahana, S.K., Saha, S.K., Eds.; Advances in Intelligent Systems and Computing; Springer: Singapore, 2017; Volume 509, pp. 357–372. ISBN 978-981-10-2524-2. [Google Scholar]
- Tatsuno, J.; Maeda, S. Driving Simulator Experiment on Ride Comfort Improvement and Low Back Pain Prevention of Autonomous Car Occupants. In Advances in Human Aspects of Transportation; Stanton, N.A., Landry, S., Di Bucchianico, G., Vallicelli, A., Eds.; Advances in Intelligent Systems and Computing; Springer International Publishing: Cham, Switzerland, 2017; Volume 484, pp. 511–523. ISBN 978-3-319-41681-6. [Google Scholar]
- Liu, S.W.; Zhou, W.K.; Hao, L. The Simulation Research on the Braking Safety and the Ride Comfort of the Vehicle AEB System. Mod. Manuf. Eng. 2018, 10, 76–81. [Google Scholar]
- Guo, J.; Hu, P.; Li, L.; Wang, R. Design of Automatic Steering Controller for Trajectory Tracking of Unmanned Vehicles Using Genetic Algorithms. IEEE Trans. Veh. Technol. 2012, 61, 2913–2924. [Google Scholar] [CrossRef]
- Guo, J.; Hu, P.; Wang, R. Nonlinear Coordinated Steering and Braking Control of Vision-Based Autonomous Vehicles in Emergency Obstacle Avoidance. IEEE Trans. Intell. Transport. Syst. 2016, 17, 3230–3240. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, Z.; Zhang, L.; Dorrell, D.G. Braking/Steering Coordination Control for in-Wheel Motor Drive Electric Vehicles Based on Nonlinear Model Predictive Control. Mech. Mach. Theory 2019, 142, 103586. [Google Scholar] [CrossRef]
- Boopathi, A.M.; Abudhahir, A. Adaptive Fuzzy Sliding Mode Controller for Wheel Slip Control in Antilock Braking System. J. Engin. Res. 2016, 4, 18. [Google Scholar] [CrossRef]
- Zheng, B.; Huang, X.; Zhao, R.; Hong, Z.; Chen, J.; Zhu, S. Study on the rut control threshold of asphalt pavement considering steering stability of autonomous vehicles based on fuzzy control theory. Adv. Civ. Eng. 2021, 2021, 8879900. [Google Scholar] [CrossRef]
- Pomoni, M. Exploring Smart Tires as a Tool to Assist Safe Driving and Monitor Tire–Road Friction. Vehicles 2022, 4, 744–765. [Google Scholar] [CrossRef]
- Matsuzaki, R.; Kamai, K.; Seki, R. Intelligent tires for identifying coefficient of friction of tire/road contact surfaces using three-axis accelerometer. Smart Mater. Struct. 2015, 9435, 025010. [Google Scholar] [CrossRef]
- Gupta, U.; Nouri, A.; Subramanian, C.; Taheri, S.; Kim, M.T.; Lee, H. Developing an experimental setup for real-time road surface identification using intelligent tires. SAE Int. J. Veh. Dyn. Stab. NVH 2021, 5, 351–367. [Google Scholar] [CrossRef]
- Xu, L.; Wang, Y.; Sun, H.; Xin, J.; Zheng, N. Design and Implementation of Driving Control System for Autonomous Vehicle. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 22–28. [Google Scholar]
- Novikov, I.; Lazarev, D. Experimental Installation for Calculation of Road Adhesion Coefficient of Locked Car Wheel. Transp. Res. Procedia 2017, 20, 463–467. [Google Scholar] [CrossRef]
- Ma, B.; Lv, C.; Liu, Y.; Zheng, M.; Yang, Y.; Ji, X. Estimation of Road Adhesion Coefficient Based on Tire Aligning Torque Distribution. J. Dyn. Syst. Meas. Control. 2018, 140, 051010. [Google Scholar] [CrossRef]
- Al-Assi, M.; Kassem, E. Evaluation of Adhesion and Hysteresis Friction of Rubber–Pavement System. Appl. Sci. 2017, 7, 1029. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Huang, X.; Zheng, B.; Zhao, R.; Liu, X.; Cao, Q.; Zhu, S. Real-Time Identification System of Asphalt Pavement Texture Based on the Close-Range Photogrammetry. Constr. Build. Mater. 2019, 226, 910–919. [Google Scholar] [CrossRef]
- Persson, B.N.J. Theory of Rubber Friction and Contact Mechanics. J. Chem. Phys. 2001, 115, 3840–3861. [Google Scholar] [CrossRef] [Green Version]
- Persson, B.N.J. On the Fractal Dimension of Rough Surfaces. Tribol. Lett. 2014, 54, 99–106. [Google Scholar] [CrossRef]
- Ciavarella, M. A Simplified Version of Persson’s Multiscale Theory for Rubber Friction Due to Viscoelastic Losses. J. Tribol. 2018, 140, 011403. [Google Scholar] [CrossRef] [Green Version]
- Johannesson, P.; Rychlik, I. Laplace Processes for Describing Road Profiles. Procedia Eng. 2013, 66, 464–473. [Google Scholar] [CrossRef] [Green Version]
- Granshaw, S.I. Close Range Photogrammetry: Principles, Methods and Applications: Book Reviews. Photogramm. Rec. 2010, 25, 203–204. [Google Scholar] [CrossRef]
- Tanaka, H.; Yoshimura, K.; Sekoguchi, R.; Aramaki, J.; Hatano, A.; Izumi, S.; Sakai, S.; Kadowaki, H. Prediction of the Friction Coefficient of Filled Rubber Sliding on Dry and Wet Surfaces with Self-Affine Large Roughness. Mech. Eng. J. 2016, 3, 15-00084. [Google Scholar] [CrossRef] [Green Version]
- Scaraggi, M.; Persson, B.N.J. Time-Dependent Fluid Squeeze-Out Between Soft Elastic Solids with Randomly Rough Surfaces. Tribol. Lett. 2012, 47, 409–416. [Google Scholar] [CrossRef]
- Zhu, S.; Liu, X.; Cao, Q.; Huang, X. Numerical Study of Tire Hydroplaning Based on Power Spectrum of Asphalt Pavement and Kinetic Friction Coefficient. Adv. Mater. Sci. Eng. 2017, 2017, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Zheng, B.; Chen, J.; Zhao, R.; Tang, J.; Tian, R.; Zhu, S.; Huang, X. Analysis of Contact Behaviour on Patterned Tire-Asphalt Pavement with 3-D FEM Contact Model. Int. J. Pavement Eng. 2022, 23, 171–186. [Google Scholar] [CrossRef]
- Xu, C.; Wang, W.; Liu, P.; Li, Z. Calibration of Crash Risk Models on Freeways with Limited Real-Time Traffic Data Using Bayesian Meta-Analysis and Bayesian Inference Approach. Accid. Anal. Prev. 2015, 85, 207–218. [Google Scholar] [CrossRef]
- Liu, X.; Cao, Q.; Wang, H.; Chen, J.; Huang, X. Evaluation of Vehicle Braking Performance on Wet Pavement Surface Using an Integrated Tire-Vehicle Modeling Approach. Transp. Res. Rec. 2019, 2673, 295–307. [Google Scholar] [CrossRef]
- Paddan, G.S.; Griffin, M.J. Evaluation of Whole-body Vibration in Vehicles. J. Sound Vib. 2002, 253, 195–213. [Google Scholar] [CrossRef]
- Zabor, E.C.; Reddy, C.A.; Tendulkar, R.D.; Patil, S. Logistic regression in clinical studies. Int. J. Radiat. Oncol. Biol. Phys. 2022, 112, 271–277. [Google Scholar] [CrossRef]
- Ahmadini, A. A novel technique for parameter estimation in intuitionistic fuzzy logistic regression model. Ain Shams Eng. J. 2021, 13, 101518. [Google Scholar] [CrossRef]
- Pisica, D.; Dammers, R.; Boersma, E.; Volovici, V. Tenets of good practice in regression analysis. a brief tutorial. World Neurosurg. 2022, 161, 230. [Google Scholar] [CrossRef] [PubMed]
- Hosmer, F.D.W. A generalized hosmer–lemeshow goodness-of-fit test for multinomial logistic regression models. Stata J. 2012, 12, 447–453. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.Z. Study on Road Traffic Accident Rate Based on Variance Analysis and Logistic Regression Model. Technol. Highw. Transp. 2016, 32, 144–147. [Google Scholar] [CrossRef]
- Zhang, S.; Peng, Y.; Lu, J.; Chen, Y.; Zhang, H. Examining the Effect of Truck Proportion on Highway Traffic Safety in Free Flow State. J. Wuhan Univ. Technol. 2017, 39, 42–48. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Content | Drawback |
|---|---|---|
| Janeway comfort factor J | where A is the vibration amplitude and f is the vibration frequency. | Vibration time is not taken into account. |
| Dieckmann index K | K = a·f2, where a is the vibration amplitude and f is the vibration frequency. | Only the case of unidirectional vibration is considered. |
| Spering index Wz | , where Z is the vibration amplitude, f is the vibration frequency and F(f) is the frequency correction factor. | Pavement performance is not considered. |
| IRI comfort threshold value | Connection between IRI (International Roughness Index) and comfort threshold value is established by considering the human psychological response. | The threshold is statistically based on the probability distribution of the experimental data, which has certain limitations and a singularity. |
| Braking deceleration | According to ergonomic theory, taking into account the degree of influence of the size of the deceleration on the braking strength, the comfort level is divided into four levels. | This method is used more often in braking and steering control. |
| ISO 2631-1 driving comfort standard | Comfort is evaluated using the root mean square value of acceleration within a 1~80 Hz vibration frequency range , , where kwp is the vibration waveform peak coefficient and aw is the weighted acceleration root-mean-square. | The variable influences of vehicle type and its dynamics parameters, dry and wet road conditions, vehicle speed and road type are neglected. |
| Vehicle-integrated vibration comfort | By combining the vehicle driving scenario, road texture parameters and vehicle dynamics parameters, an integrated vibration comfort was proposed based on the international standard ISO 2361/CD-1991 “Total Ride Value Method”. | ISO regulations do not take into account the impact of vibration below 1 Hz on passenger comfort, and a longer period in the vibration environment does not reflect the actual objective feeling. |
| Sieve Size (mm) | Passing Rate of Each Sieve (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Components | 0.075 | 0.15 | 0.3 | 0.6 | 1.18 | 2.36 | 4.75 | 9.5 | 13.2 | 16 | |
| AC-13 | 6 | 10 | 13.5 | 19 | 26.5 | 37 | 53 | 76.5 | 95 | 100 | |
| Items | Value | Items | Values |
|---|---|---|---|
| Vehicle mass | 2257 kg | Distance between the centroid and front axis | 1330 mm |
| Vehicle length | 4475 mm | Axle spacing | 3140 mm |
| Vehicle width | 2029 mm | Roll inertia Ixx | 846.6 kg·m2 |
| Vehicle height | 1966 mm | Pitch inertia Iyy | 3524.9 kg·m2 |
| Centroid height | 780 mm | Yaw inertia Izz | 3524.9 kg·m2 |
| Levels | CI Range (m/s2) | Description of Vehicle Comfort | Color |
|---|---|---|---|
| 0 | >2.0000 | Extremely uncomfortable | |
| 1 | 1.2500~2.5000 | Very uncomfortable | |
| 2 | 0.8000~1.6000 | Uncomfortable | |
| 3 | 0.5000~1.0000 | Fairly uncomfortable | |
| 4 | 0.3150~0.6300 | A little uncomfortable | |
| 5 | <0.5000 | Comfortable |
| Time Interval (s) | Comfort Index CIP with Different Braking Pressures (m/s2) | ||||||
|---|---|---|---|---|---|---|---|
| CI0.5 | CI1.0 | CI2.0 | CI4.0 | CI6.0 | CI8.0 | CI10.0 | |
| Δt1 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt2 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt3 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt4 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt5 | 5 | 4 | 3 | 2 | 1~2 | 1~2 | 1~2 |
| Δt6 | 5 | 4 | 3 | 2 | 1~2 | 1~2 | 1~2 |
| Δt7 | 5 | 4 | 3 | 2 | 1~2 | 1~2 | 1~2 |
| Δt8 | 5 | 4 | 3~4 | 2 | 1~2 | 1~2 | 1~2 |
| Δt9 | 5 | 4 | 3~4 | 2 | 5 | 5 | 5 |
| Δt10 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt11 | 5 | 4 | 3~4 | 5 | 5 | 5 | 5 |
| Δt12 | 5 | 4 | 3~4 | 5 | 5 | 5 | 5 |
| Δt13 | 5 | 4 | 3~4 | 5 | 5 | 5 | 5 |
| Δt14 | 5 | 4 | 4 | 5 | 5 | 5 | 5 |
| Δt15 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt16 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt17 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt18 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt19 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt20 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt21 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Time Interval (s) | Comfort Index CIP with Different Braking Pressure (m/s2) | ||||||
|---|---|---|---|---|---|---|---|
| CI0.5 | CI1.0 | CI2.0 | CI4.0 | CI6.0 | CI8.0 | CI10.0 | |
| Δt1 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt2 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt3 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt4 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Δt5 | 5 | 4 | 3 | 2 | 2 | 2 | 2 |
| Δt6 | 5 | 4 | 3 | 2 | 2 | 2 | 2 |
| Δt7 | 5 | 4 | 3 | 2 | 2 | 2 | 2 |
| Δt8 | 5 | 4 | 3~4 | 2 | 2 | 2 | 2 |
| Δt9 | 5 | 4 | 3~4 | 2 | 2 | 2 | 2 |
| Δt10 | 5 | 4 | 3 | 2 | 2 | 2 | 2 |
| Δt11 | 5 | 4 | 3~4 | 5 | 5 | 5 | 5 |
| Δt12 | 5 | 4 | 3~4 | 5 | 5 | 5 | 5 |
| Δt13 | 5 | 4 | 3~4 | 5 | 5 | 5 | 5 |
| Δt14 | 5 | 4 | 4 | 5 | 5 | 5 | 5 |
| Δt15 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt16 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt17 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt18 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt19 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt20 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Δt21 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Prediction Model | Regression Coefficient | Standard Error | t | PL > |t| | 95% Confidence Interval | |
|---|---|---|---|---|---|---|
| Level 2 | Constant | −1.5291 | 0.6514 | −2.35 | 0.019 | −2.8060~−0.2523 |
| P | 0.2545 | 0.0835 | 3.05 | 0.002 | 0.0909~0.4181 | |
| Δt | −0.1429 | 0.4649 | −3.07 | 0.002 | −0.2341~−0.0518 | |
| Level 3 | Constant | −0.7336 | 0.8356 | −0.88 | 0.038 | −2.3713~−0.9041 |
| P | −0.3676 | 0.2001 | −1.84 | 0.015 | −0.0542~0.3509 | |
| Δt | −0.0722 | 0.0708 | −1.02 | 0.031 | −0.2110~0.0667 | |
| Level 4 | Constant | −0.3744 | 0.7033 | −0.53 | 0.029 | −1.7528~1.0039 |
| P | −0.8316 | 0.2528 | −3.29 | 0.001 | −1.3270~−0.3362 | |
| Δt | 0.0571 | 0.0479 | 1.19 | 0.023 | −0.0368~0.1510 | |
| Model | Test Coefficient chi2 | df | Snell R-Squared | PL > chi2 | Significance |
|---|---|---|---|---|---|
| Level 2 | −2.561 | 6 | 0.2209 | 1.000 | For Ho |
| Level 3 | −2.376 | 6 | 1.000 | For Ho | |
| Level 4 | −1.503 | 6 | 1.000 | For Ho | |
| Level 5 | 14.951 | 3 | 0.002 | Against Ho |
| Braking Scenarios | Road Conditions | Evaluation Function of Comfort Level | Prediction Model | Sensing Parameters of Road Environment |
|---|---|---|---|---|
| Emergency braking | Dry road | logit (Pj) = f (P, ∆t, k1) | Equation (8) | Brake pressure, adhesion characteristics |
| Wet road | Equation (9) | |||
| Steering braking | Dry road | logit (Pj) = f (R, ∆t, k2) | Equation (10) | Radius, travel path and adhesion characteristics |
| Wet road | Equation (11) | |||
| Braking on slope section | Dry road | logit (Pj) = f (i, v0, ∆t, k3) | Equation (12) | Slope gradient, adhesion characteristics and initial speed |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, B.; Hong, Z.; Tang, J.; Han, M.; Chen, J.; Huang, X. A Comprehensive Method to Evaluate Ride Comfort of Autonomous Vehicles under Typical Braking Scenarios: Testing, Simulation and Analysis. Mathematics 2023, 11, 474. https://doi.org/10.3390/math11020474
Zheng B, Hong Z, Tang J, Han M, Chen J, Huang X. A Comprehensive Method to Evaluate Ride Comfort of Autonomous Vehicles under Typical Braking Scenarios: Testing, Simulation and Analysis. Mathematics. 2023; 11(2):474. https://doi.org/10.3390/math11020474
Chicago/Turabian StyleZheng, Binshuang, Zhengqiang Hong, Junyao Tang, Meiling Han, Jiaying Chen, and Xiaoming Huang. 2023. "A Comprehensive Method to Evaluate Ride Comfort of Autonomous Vehicles under Typical Braking Scenarios: Testing, Simulation and Analysis" Mathematics 11, no. 2: 474. https://doi.org/10.3390/math11020474