
Observer-Based PID Control Protocol of Positive Multi-Agent Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
2.1. Positive Theory
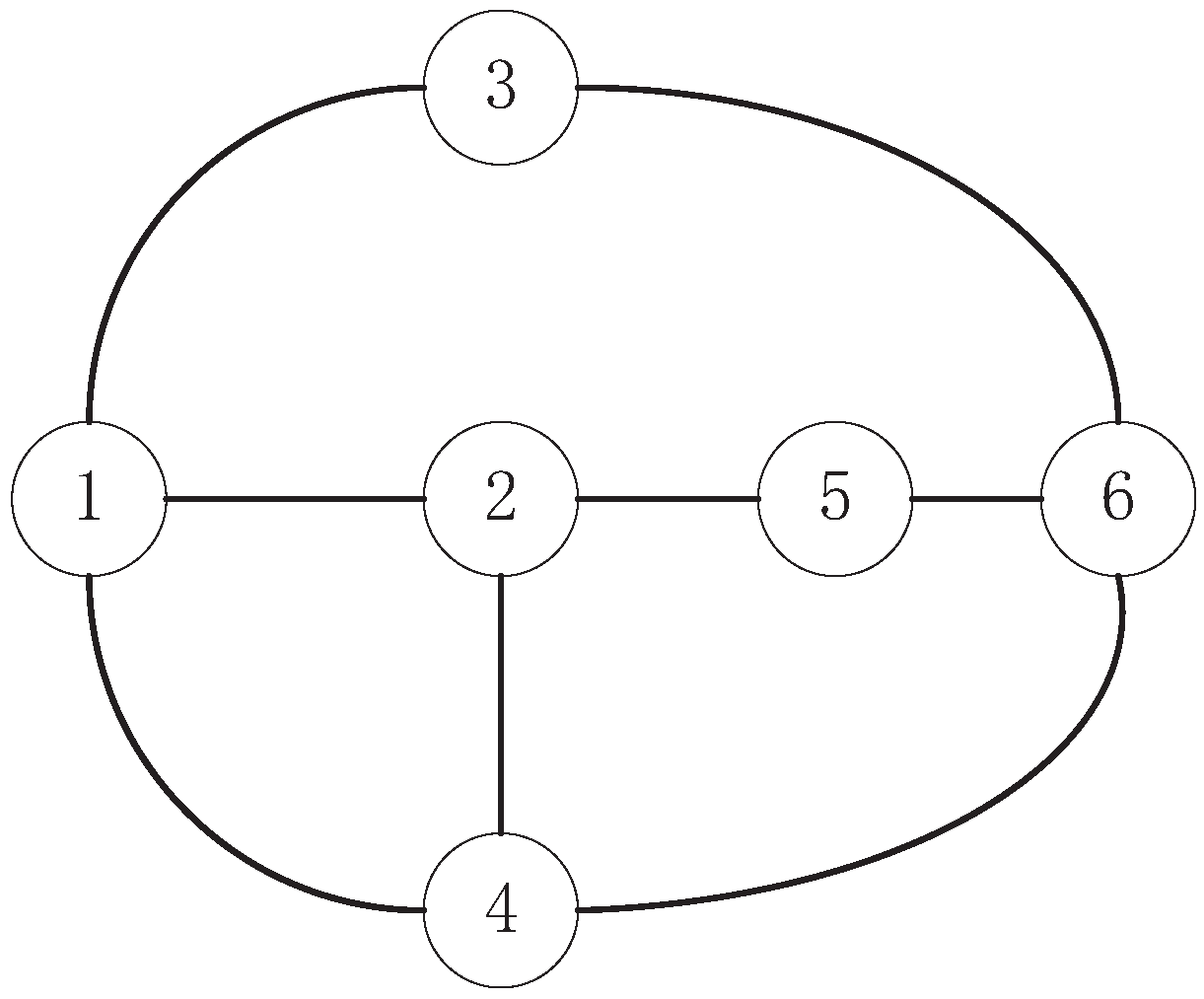
2.2. Graph Theory
2.3. Problem Formulation
3. Main Results
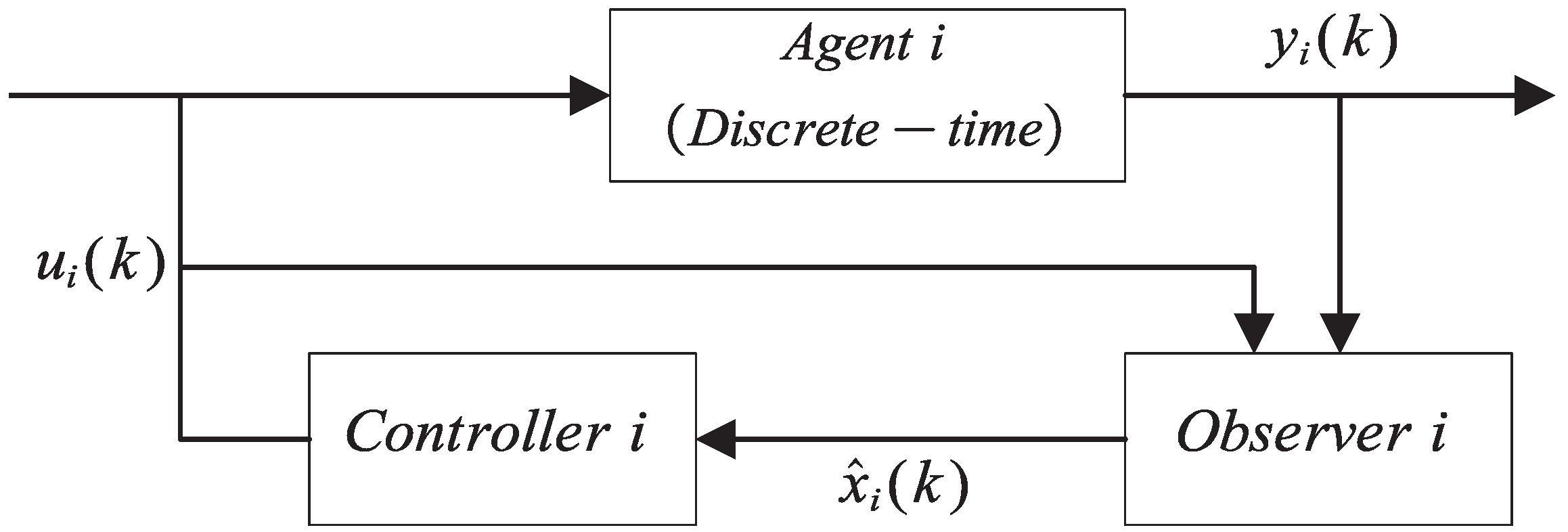
3.1. Positive Observer for General PMASs
3.2. Observer-Based PID Protocol of Homogeneous PMASs
3.3. Observer-Based PID Control for Heterogeneous PMASs
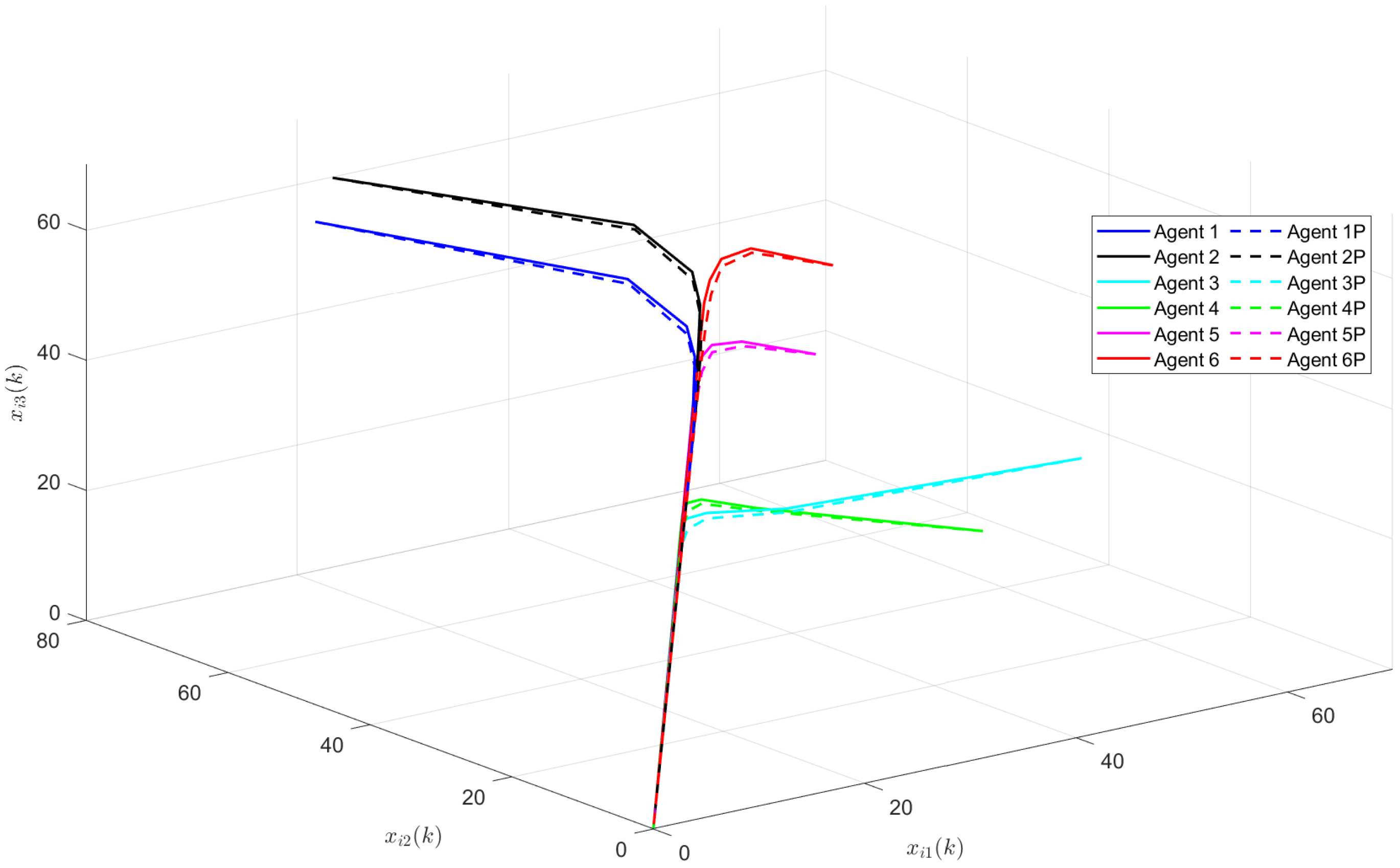
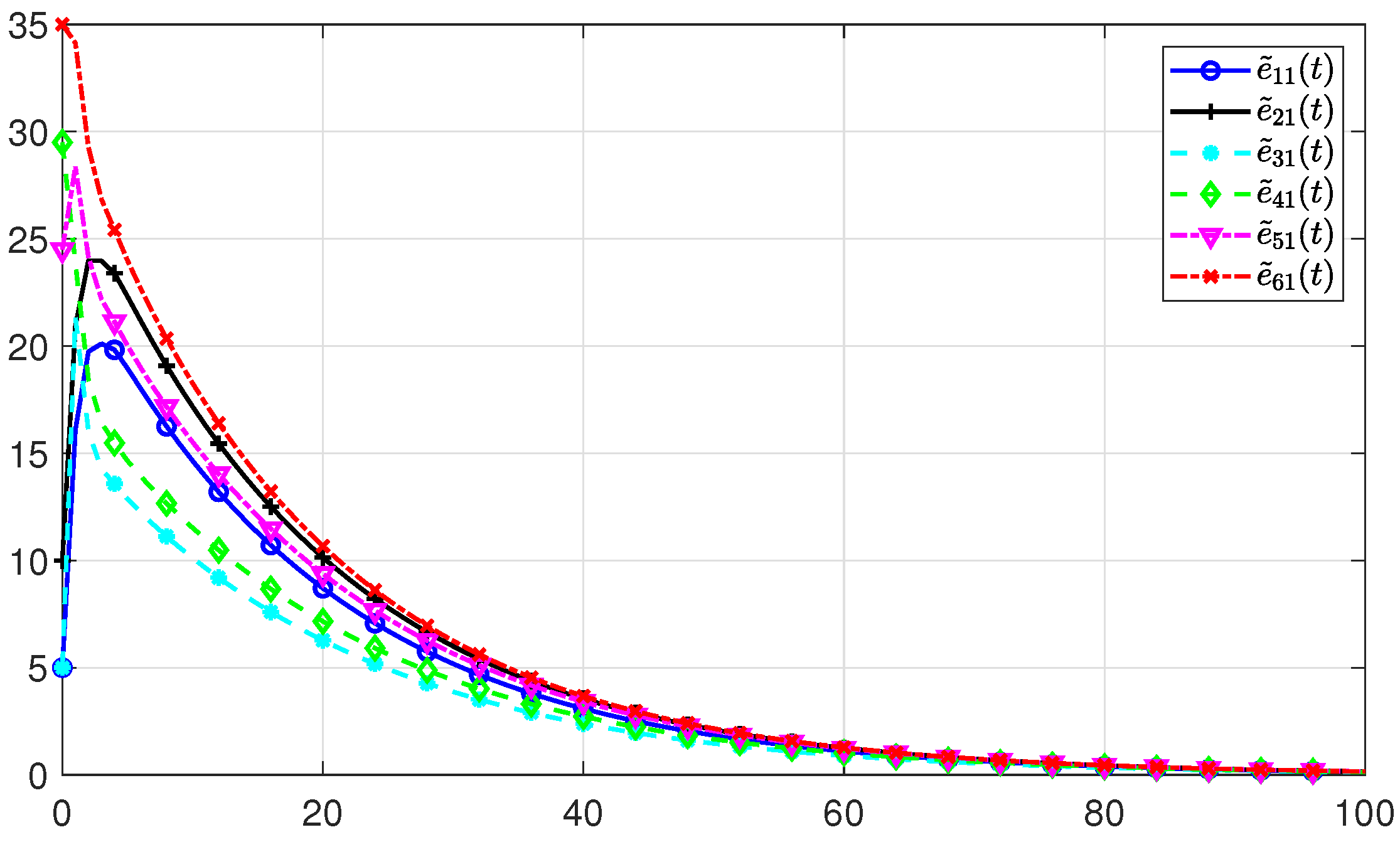
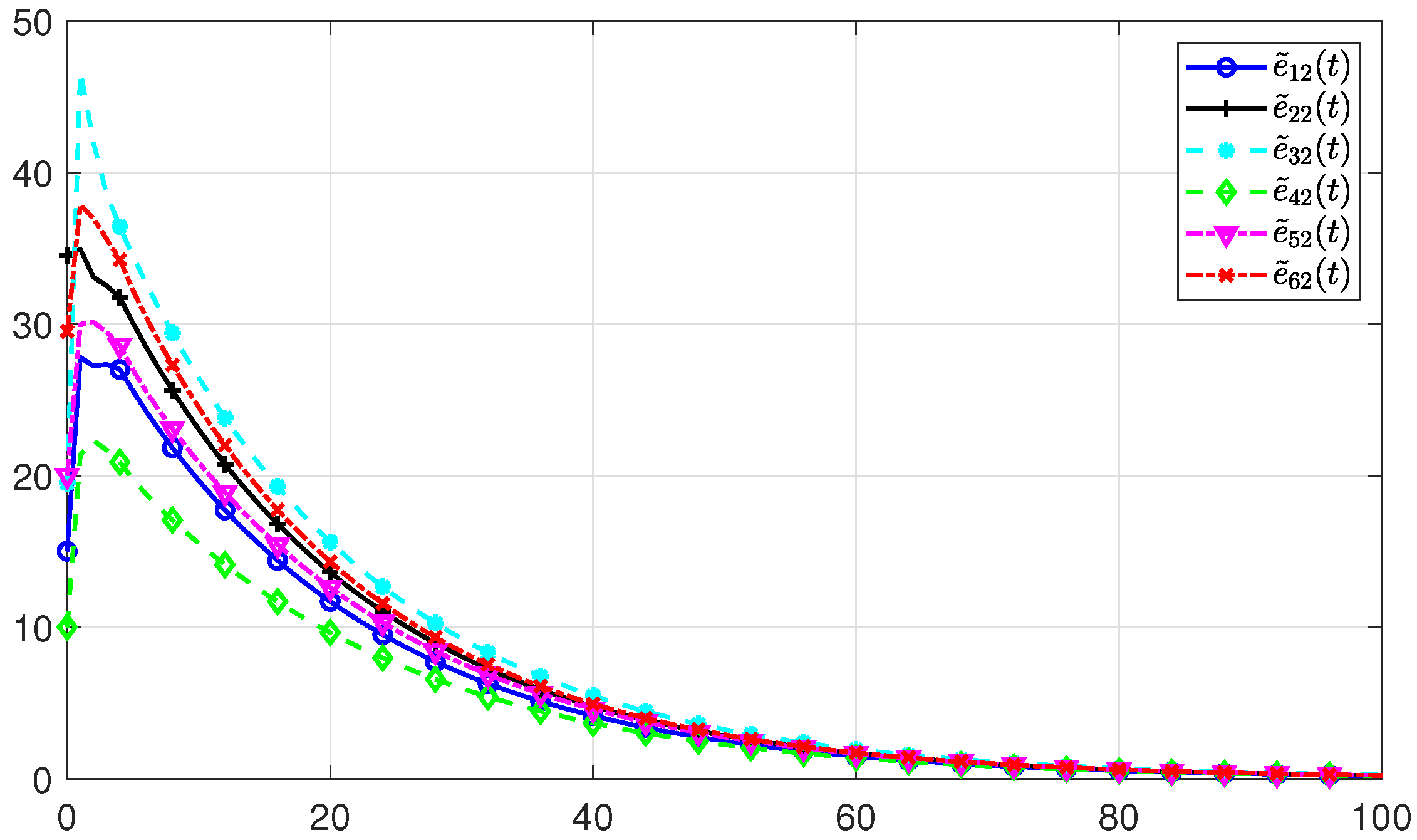
4. Illustrative Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PMASs | Positive Multi-Agent Systems |
| MASs | Multi-Agent Systems |
| PID | Proportional-Integral-Derivative |
References
- McArthur, S.D.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part II: Technologies, Standards, and Tools for Building Multi-Agent Systems. IEEE Trans. Power Syst. 2007, 22, 1753–1759. [Google Scholar] [CrossRef] [Green Version]
- Sujil, A.; Verma, J.; Kumar, R. Multi Agent System: Concepts, Platforms and Applications in Power Systems. Artif. Intell. Rev. 2018, 49, 153–182. [Google Scholar] [CrossRef]
- Lee, J.H.; Kim, C.O. Multi-Agent Systems Applications in Manufacturing Systems and Supply Chain Management: A Review Paper. Int. J. Prod. Res. 2008, 46, 233–265. [Google Scholar] [CrossRef]
- Dudek, G.; Jenkin, M.R.; Milios, E.; Wilkes, D. A Taxonomy for Multi-Agent Robotics. Auton. Robots 1996, 3, 375–397. [Google Scholar] [CrossRef]
- Ota, J. Multi-Agent Robot Systems as Distributed Autonomous Systems. Adv. Eng. Inform. 2006, 20, 59–70. [Google Scholar] [CrossRef]
- Afrin, M.; Jin, J.; Rahman, A.; Rahman, A.; Wan, J.; Hossain, E. Resource Allocation and Service Provisioning in Multi-Agent Cloud Robotics: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2021, 23, 842–870. [Google Scholar] [CrossRef]
- Cai, J.; Kim, D.; Jaramillo, R.; Braun, J.E.; Hu, J. A General Multi-Agent Control Approach for Building Energy System Optimization. Energy Build. 2016, 127, 337–351. [Google Scholar] [CrossRef] [Green Version]
- González-Briones, A.; De La Prieta, F.; Mohamad, M.S.; Omatu, S.; Corchado, J.M. Multi-Agent Systems Applications in Energy Optimization Problems: A State-of-the-Art Review. Energies 2018, 11, 1928. [Google Scholar] [CrossRef] [Green Version]
- Dong, G.; Li, H.; Ma, H.; Lu, R. Finite-Time Consensus Tracking Neural Network FTC of Multi-Agent Systems. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 653–662. [Google Scholar] [CrossRef]
- Li, X.M.; Zhou, Q.; Li, P.; Li, H.; Lu, R. Event-Triggered Consensus Control for Multi-Agent Systems against False Data-Injection Attacks. IEEE Trans. Cybern. 2019, 50, 1856–1866. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, Y.; Li, X. Cluster-Delay Consensus in First-Order Multi-Agent Systems with Nonlinear Dynamics. Nonlinear Dyn. 2016, 83, 1303–1310. [Google Scholar] [CrossRef]
- Valcher, M.E.; Misra, P. On the Stabilizability and Consensus of Positive Homogeneous Multi-Agent Dynamical Systems. IEEE Trans. Autom. Control 2014, 59, 1936–1941. [Google Scholar] [CrossRef]
- Su, H.; Wu, H.; Chen, X.; Chen, M.Z.Q. Positive Edge Consensus of Complex Networks. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 2242–2250. [Google Scholar] [CrossRef]
- Ren, W.; Atkins, E. Distributed Multi-Vehicle Coordinated Controlvia Local Information Exchange. Int. J. Robust Nonlinear Control 2007, 17, 1002–1033. [Google Scholar] [CrossRef] [Green Version]
- Pahuja, R.; Verma, H.; Uddin, M. A Wireless Sensor Network for Greenhouse Climate Control. IEEE Pervasive Comput. 2013, 12, 49–58. [Google Scholar] [CrossRef]
- Silva, P.C.; Batista, P.V.; Lima, H.S.; Alves, M.A.; Guimarães, F.G.; Silva, R.C. COVID-ABS: An Agent-Based Model of COVID-19 Epidemic to Simulate Health and Economic Effects of Social Distancing Interventions. Chaos Solitons Fractals 2020, 139, 110088. [Google Scholar] [CrossRef]
- Rami, M.A.; Tadeo, F. Controller Synthesis for Positive Linear Systems With Bounded Controls. IEEE Trans. Circuits Syst. II Express Briefs 2007, 54, 151–155. [Google Scholar] [CrossRef]
- Xiang, M.; Xiang, Z. Stability, L1-gain and Control Synthesis for Positive Switched Systems with Time-Varying Delay. Nonlinear Anal. Hybrid Syst. 2013, 9, 9–17. [Google Scholar] [CrossRef]
- Shen, J.; Lam, J. L∞ -Gain Analysis for Positive Systems with Distributed Delays. Automatica 2014, 50, 175–179. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, G.; Feng, Y.; Chen, Y. Event-Triggered State-Feedback and Dynamic Output-Feedback Control of Positive Markovian Jump Systems With Intermittent Faults. IEEE Trans. Autom. Control 2022. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, S.; Deng, X.; Huang, Z. Adaptive Event-Triggered Dynamic Distributed Control of Switched Positive Systems with Switching Faults. Nonlinear Anal. Hybrid Syst. 2023, 48, 101328. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Taniguchi, T.; Eciolaza, L.; Campos, V.; Palhares, R.; Sugeno, M. Fuzzy Control Systems: Past, Present and Future. IEEE Comput. Intell. Mag. 2019, 14, 56–68. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Y.J.; Chen, A.; Tong, S.; Chen, C.L.P. Integral Barrier Lyapunov Function-Based Adaptive Control for Switched Nonlinear Systems. Sci. China Inf. Sci. 2020, 63, 132203. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Shi, P.; Shen, C.; Wu, Z.G. Static Output Feedback Control of Switched Nonlinear Systems With Actuator Faults. IEEE Trans. Fuzzy Syst. 2020, 28, 1600–1609. [Google Scholar] [CrossRef]
- Zhang, D.; Han, Q.L.; Zhang, X.M. Network-Based Modeling and Proportional–Integral Control for Direct-Drive-Wheel Systems in Wireless Network Environments. IEEE Trans. Cybern. 2020, 50, 2462–2474. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Abdulkareem, A.I. Design of Augmented Nonlinear PD Controller of Delta/Par4-Like Robot. J. Control Sci. Eng. 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Zhao, C.; Guo, L. PID Controller Design for Second Order Nonlinear Uncertain Systems. Sci. China Inf. Sci. 2017, 60, 022201. [Google Scholar] [CrossRef] [Green Version]
- Ang, K.H.; Chong, G.; Li, Y. PID Control System Analysis, Design, and Technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Guo, L. Control of Nonlinear Uncertain Systems by Extended PID. IEEE Trans. Autom. Control 2021, 66, 3840–3847. [Google Scholar] [CrossRef]
- Li, X.G.; Niculescu, S.I.; Chen, J.X.; Chai, T. Characterizing PID Controllers for Linear Time-Delay Systems: A Parameter-Space Approach. IEEE Trans. Autom. Control 2021, 66, 4499–4513. [Google Scholar] [CrossRef]
- Yu, H.; Guan, Z.; Chen, T.; Yamamoto, T. Design of Data-Driven PID Controllers with Adaptive Updating Rules. Automatica 2020, 121, 109185. [Google Scholar] [CrossRef]
- Lui, D.G.; Petrillo, A.; Santini, S. An Optimal Distributed PID-like Control for the Output Containment and Leader-Following of Heterogeneous High-Order Multi-Agent Systems. Inf. Sci. 2020, 541, 166–184. [Google Scholar] [CrossRef]
- De Tommasi, G.; Lui, D.G.; Petrillo, A.; Santini, S. A L2-gain Robust PID-like Protocol for Time-varying Output Formation-containment of Multi-agent Systems with External Disturbance and Communication Delays. IET Control Theory Appl. 2021, 15, 1169–1184. [Google Scholar] [CrossRef]
- Yu, X.; Yang, F.; Zou, C.; Ou, L. Stabilization Parametric Region of Distributed PID Controllers for General First-Order Multi-Agent Systems With Time Delay. IEEE-CAA J. Autom. Sin. 2020, 7, 1555–1564. [Google Scholar] [CrossRef]
- Li, Z.; Ren, W.; Liu, X.; Fu, M. Consensus of Multi-Agent Systems with General Linear and Lipschitz Nonlinear Dynamics Using Distributed Adaptive Protocols. IEEE Trans. Autom. Control 2013, 58, 1786–1791. [Google Scholar] [CrossRef] [Green Version]
- Valcher, M.E.; Zorzan, I. On the Consensus of Homogeneous Multiagent Systems With Positivity Constraints. IEEE Trans. Autom. Control 2017, 62, 5096–5110. [Google Scholar] [CrossRef]
- Liu, J.J.R.; Lam, J.; Kwok, K.W. Positive Consensus of Fractional-Order Multiagent Systems Over Directed Graphs. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–7. [Google Scholar] [CrossRef]
- Samad, T. A Survey on Industry Impact and Challenges Thereof. IEEE Control Syst. Mag. 2017, 37, 17–18. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Chen, G. Consensus of Discrete-Time Linear Multi-Agent Systems with Observer-Type Protocols. Discrete Contin. Dyn. Syst. 2011, 16, 489–505. [Google Scholar] [CrossRef] [Green Version]
- Cai, H.; Lewis, F.L.; Hu, G.; Huang, J. The Adaptive Distributed Observer Approach to the Cooperative Output Regulation of Linear Multi-Agent Systems. Automatica 2017, 75, 299–305. [Google Scholar] [CrossRef]
- You, R.; Tang, M.; Guo, S.; Cui, G. Proportional Integral Observer-based Consensus Control of Discrete-time Multi-agent Systems. Int. J. Control Autom. Syst. 2022, 20, 1461–1472. [Google Scholar] [CrossRef]
- Gong, X.; Liu, J.; Wang, Y.; Lam, J. Consensus of Discrete-time Positive Multi-agent Systems with Observer-type Protocols. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; IEEE: Edinburgh, UK, 2019; pp. 846–850. [Google Scholar] [CrossRef]
- Wu, H.; Su, H. Observer-Based Consensus for Positive Multiagent Systems With Directed Topology and Nonlinear Control Input. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1459–1469. [Google Scholar] [CrossRef]
- Liu, J.J.R.; Lam, J.; Wang, Y.; Cui, Y.; Shu, Z. Robust and Nonfragile Consensus of Positive Multiagent Systems via Observer-based Output-feedback Protocols. Int. J. Robust Nonlinear Control 2020, 30, 5386–5403. [Google Scholar] [CrossRef]
- Chen, S.; An, Q.; Zhou, H.; Su, H. Observer-Based Consensus for Fractional-Order Multi-Agent Systems with Positive Constraint. Neurocomputing 2022, 501, 489–498. [Google Scholar] [CrossRef]
- Farina, L.; Rinaldi, S. Positive Linear Systems: Theory and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2000; Volume 50. [Google Scholar]
- Kaczorek, T. Positive 1D and 2D Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Rami, M.A.; Tadeo, F. Positive Observation Problem for Linear Discrete Positive Systems. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 4729–4733. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, R.; Chen, Y.; Fu, S. Linear Programming Based Dynamic Output-Feedback Controller for Positive Systems. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1709–1714. [Google Scholar] [CrossRef]
- Luenberger, D. An Introduction to Observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Liu, J.J.R.; Yang, N.; Kwok, K.W.; Lam, J. Positive Consensus of Directed Multiagent Systems. IEEE Trans. Autom. Control 2022, 67, 3641–3646. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Patra, S. Positive Consensus of Multi-Agent Systems with Hierarchical Control Protocol. Automatica 2022, 139, 110191. [Google Scholar] [CrossRef]
- Cao, X.; Li, Y. Positive Consensus for Multi-Agent Systems with Average Dwell Time Switching. J. Frankl. Inst. 2021, 358, 8308–8329. [Google Scholar] [CrossRef]
- Yang, N.; Yin, Y.; Liu, J. Positive Consensus of Directed Multi-agent Systems Using Dynamic Output-feedback Control. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019; pp. 897–902. [Google Scholar] [CrossRef]
- Sun, Y.; Su, H.; Wang, X.; Chen, S. Semi-global Edge-consensus of Linear Discrete-time Multi-agent Systems with Positive Constraint and Input Saturation. IET Control Theory Appl. 2019, 13, 979–987. [Google Scholar] [CrossRef]
- Gionfra, N.; Sandou, G.; Siguerdidjane, H.; Faille, D. A Distributed PID-like Consensus Control for Discrete-time Multi-agent Systems. In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics, Madrid, Spain, 26–28 July 2017; pp. 72–81. [Google Scholar] [CrossRef]
- Li, J.; Wang, J. Reinforcement Learning Based Proportional–Integral–Derivative Controllers Design for Consensus of Multi-Agent Systems. ISA Trans. 2022, in press. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, L.; Zhu, Y. Consensus of Heterogeneous Multi-Agent Systems. IET Control Theory Appl. 2011, 5, 1881–1888. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, L. Containment Control of Heterogeneous Multi-Agent Systems. Int. J. Control 2014, 87, 1–8. [Google Scholar] [CrossRef]
- Ma, Q.; Miao, G. Output Consensus for Heterogeneous Multi-Agent Systems with Linear Dynamics. Appl. Math. Comput. 2015, 271, 548–555. [Google Scholar] [CrossRef]
- Zuo, S.; Song, Y.; Lewis, F.L.; Davoudi, A. Output Containment Control of Linear Heterogeneous Multi-Agent Systems Using Internal Model Principle. IEEE Trans. Cybern. 2017, 47, 2099–2109. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Huang, M.; Wu, Y.; Feng, S. Observer-Based PID Control Protocol of Positive Multi-Agent Systems. Mathematics 2023, 11, 419. https://doi.org/10.3390/math11020419
Yang X, Huang M, Wu Y, Feng S. Observer-Based PID Control Protocol of Positive Multi-Agent Systems. Mathematics. 2023; 11(2):419. https://doi.org/10.3390/math11020419
Chicago/Turabian StyleYang, Xiaogang, Mengxing Huang, Yuanyuan Wu, and Siling Feng. 2023. "Observer-Based PID Control Protocol of Positive Multi-Agent Systems" Mathematics 11, no. 2: 419. https://doi.org/10.3390/math11020419