
Enhanced Non-Maximum Suppression for the Detection of Steel Surface Defects

Abstract
:1. Introduction
1.1. Related Works
1.2. Motivations and Contributions
- We propose an enhanced NMS approach that consists of three novel and innovative techniques, IoU regularization, threshold adjustment, and comparison rule modification, to enhance the detection performance by strictly suppressing false positives.
- We carry out extensive experiments on the popular steel surface defect datasets NEU-DET and GC10-DET to evaluate the performance of the proposed NMS method for the YOLOv7 and EfficientDet models and compare it to the conventional NMS approaches. The experimental results demonstrate that the proposed method outperforms the comparable NMS approaches in quantitative and qualitative manners.
1.3. Organization
2. Proposed Scheme
2.1. IoU Regularization
2.2. Threshold Adjustment
2.3. Suppression Rule Modification
| Algorithm 1: Modified comparison rule |
 |
3. Experimental Results and Discussions
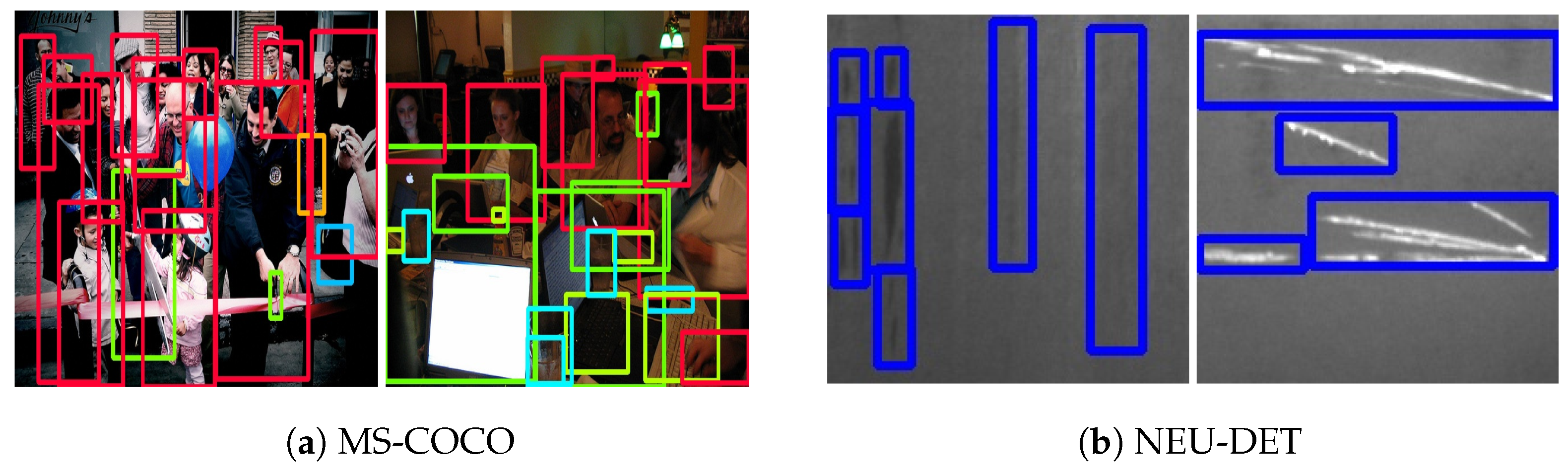
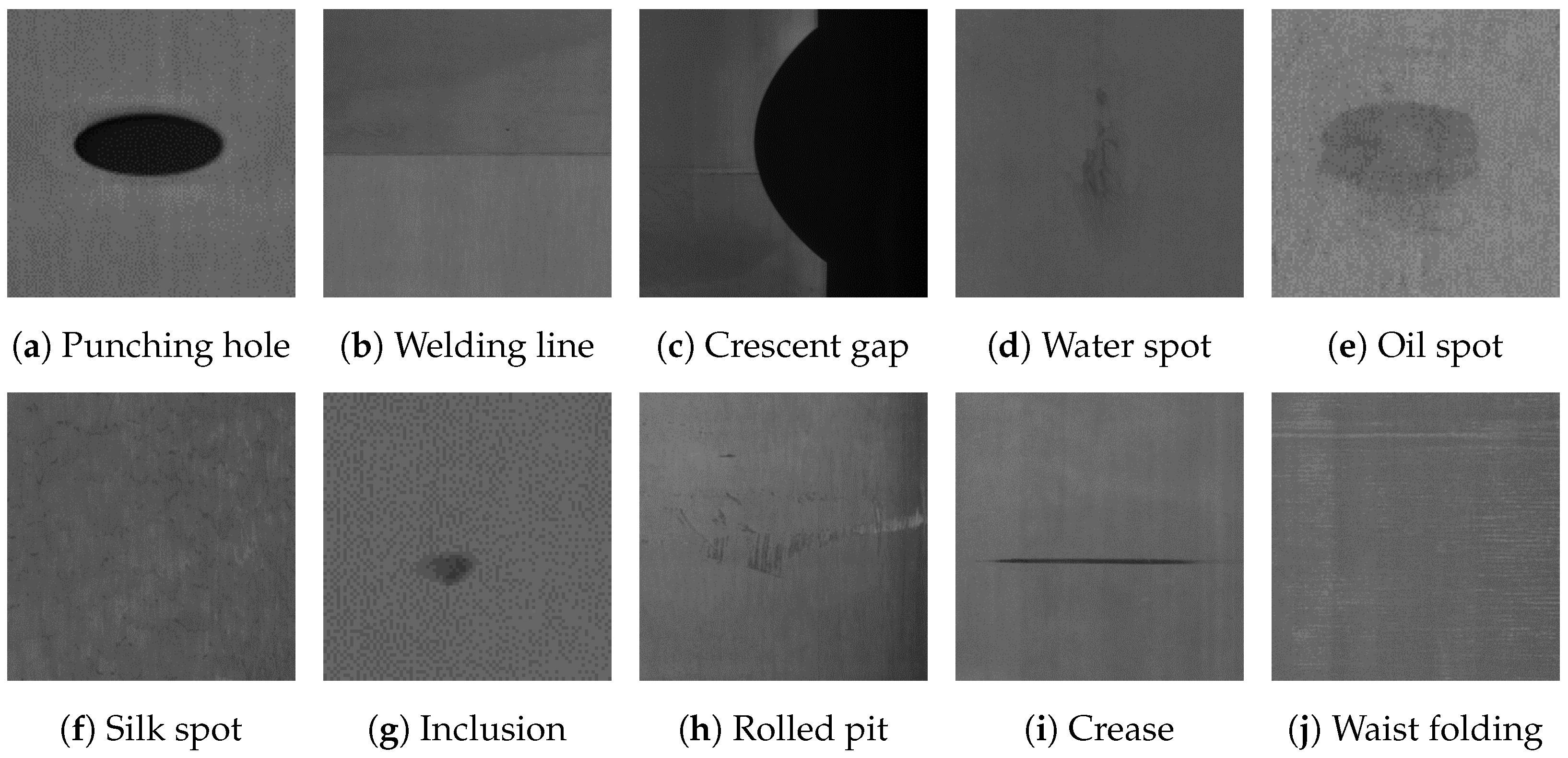
3.1. Dataset Description
3.2. Hyperparameters for Models and NMS Schemes
3.3. Performance Evaluation Metric
- Micro-Average Recall
- Micro-Average Precision
- Micro-Average F1-score
- Macro-Average Recall
- Macro-Average Precision
- Macro-Average F1-score
3.4. Results and Discussions
3.4.1. Quantitative Result
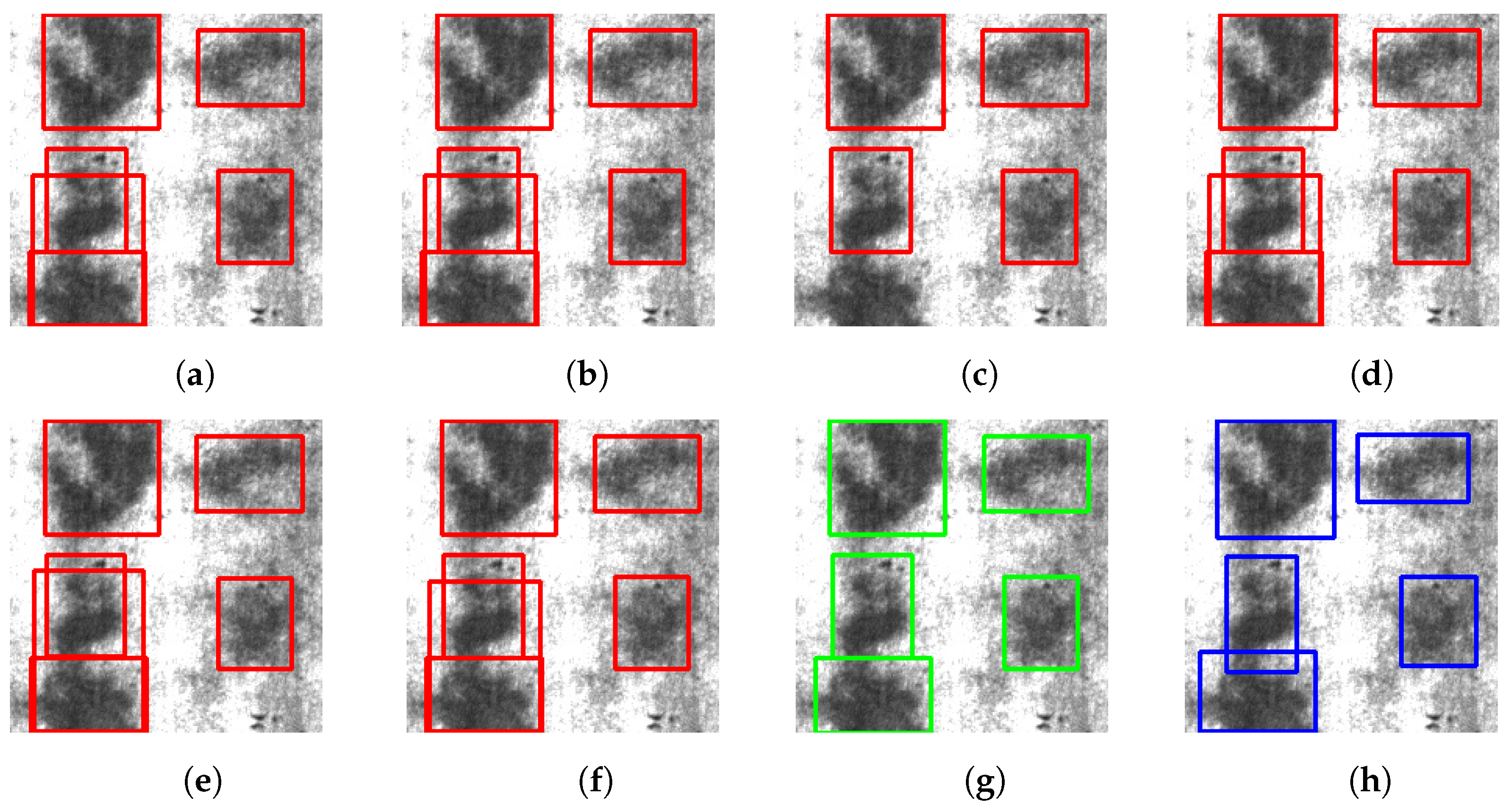
3.4.2. Qualitative Result
3.5. Ablation Study
4. Conclusions and Discussions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shu, Y.F.; Li, B.; Li, X.; Xiong, C.; Cao, S.; Wen, X.Y. Deep learning-based fast recognition of commutator surface defects. Measurement 2021, 178, 109324. [Google Scholar] [CrossRef]
- Xu, Y.; Li, D.; Xie, Q.; Wu, Q.; Wang, J. Automatic defect detection and segmentation of tunnel surface using modified Mask R-CNN. Measurement 2021, 178, 109316. [Google Scholar] [CrossRef]
- Luo, Q.; Fang, X.; Liu, L.; Yang, C.; Sun, Y. Automated visual defect detection for flat steel surface: A survey. IEEE Trans. Instrum. Meas. 2020, 69, 626–644. [Google Scholar] [CrossRef]
- Tian, R.; Jia, M. DCC-CenterNet: A rapid detection method for steel surface defects. Measurement 2022, 187, 110211. [Google Scholar] [CrossRef]
- He, Y.; Song, K.; Meng, Q.; Yan, Y. An end-to-end steel surface defect detection approach via fusing multiple hierarchical features. IEEE Trans. Instrum. Meas. 2019, 69, 1493–1504. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Proc. Conf. Neural Inf. Process. Syst. 2012, 60, 84–90. [Google Scholar] [CrossRef]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A survey of convolutional neural networks: Analysis, applications, and prospects. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 6999–7019. [Google Scholar] [CrossRef]
- Ren, R.; Hung, T.; Tan, K.C. A generic deep-learning-based approach for automated surface inspection. IEEE Trans. Cybern. 2018, 48, 929–940. [Google Scholar] [CrossRef]
- Racki, D.; Tomazevic, D.; Skocaj, D. A compact convolutional neural network for textured surface anomaly detection. In Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, USA, 12–15 March 2018; pp. 1331–1339. [Google Scholar]
- Mei, S.; Yang, H.; Yin, Z. An unsupervised-learning-based approach for automated defect inspection on textured surfaces. IEEE Trans. Instrum. Meas. 2018, 67, 1266–1277. [Google Scholar] [CrossRef]
- Wang, T.; Chen, Y.; Qiao, M.; Snoussi, H. A fast and robust convolutional neural network-based defect detection model in product quality control. Int. J. Adv. Manuf. Technol. 2018, 94, 3465–3471. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Z.; Wang, H.; Nunez, A.; Han, Z. Automatic defect detection of fasteners on the catenary support device using deep convolutional neural network. IEEE Trans. Instrum. Meas. 2018, 67, 257–269. [Google Scholar] [CrossRef]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 7464–7475. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Cui, L.; Jiang, X.; Xu, M.; Li, W.; Lv, P.; Zhou, B. SDDNet: A fast and accurate network for surface defect detection. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Yeung, C.C.; Lam, K.M. Efficient fused-attention model for steel surface defect detection. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Li, M.; Wang, H.; Wan, Z. Surface defect detection of steel strips based on improved YOLOv4. Comput. Electr. Eng. 2022, 102, 108208. [Google Scholar] [CrossRef]
- Qian, X.; Wang, X.; Yang, S.; Lei, J. LFF-YOLO: A YOLO Algorithm with Lightweight Feature Fusion Network for Multi-Scale Defect Detection. IEEE Access 2022, 10, 130339–130349. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems 28 (NIPS 2015), Montreal, QC, Canada, 7–12 December 2015; Volume 28. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Liu, S.; Huang, D. Receptive field block net for accurate and fast object detection. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 385–400. [Google Scholar]
- Rosenfeld, A.; Thurston, M. Edge and curve detection for visual scene analysis. IEEE Trans. Comput. 1971, 100, 562–569. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Schmid, C. Scale & affine invariant interest point detectors. Int. J. Comput. Vis. 2004, 60, 63–86. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the CVPR 2001—2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Kauai, HI, USA, 8–14 December 2001; Volune 1, pp. I-511–I-518. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Solovyev, R.; Wang, W.; Gabruseva, T. Weighted boxes fusion: Ensembling boxes from different object detection models. Image Vis. Comput. 2021, 107, 104117. [Google Scholar] [CrossRef]
- Bodla, N.; Singh, B.; Chellappa, R.; Davis, L.S. Soft-NMS–improving object detection with one line of code. In Proceedings of the IEEE International Conference on Computer Vision 2017, Venice, Italy, 22–29 October 2017; pp. 5561–5569. [Google Scholar]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU loss: Faster and better learning for bounding box regression. In Proceedings of the AAAI conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 12993–13000. [Google Scholar]
- Kang, S.; Shin, Y.; Lee, S.; Park, J.; Kang, J. Exponential NMS: An Effective Bounding Box Overlap Suppression Technique for Improving False Positive Performance of Metal Appearance. J. Korea Inst. Intell. Syst. 2022, 32, 464–472. [Google Scholar]
- Shepley, A.J.; Falzon, G.; Kwan, P.; Brankovic, L. Confluence: A Robust Non-IoU Alternative to Non-Maxima Suppression in Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 11561–11574. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Computer Vision-ECCV 2014, Proceedings of the 13th European Conference, Zurich, Switzerland, 6–12 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar]
- Song, K.; Yan, Y. A noise robust method based on completed local binary patterns for hot-rolled steel strip surface defects. Appl. Surf. Sci. 2013, 285, 858–864. [Google Scholar] [CrossRef]
- Lv, X.; Duan, F.; Jiang, J.J.; Fu, X.; Gan, L. Deep Metallic Surface Defect Detection: The New Benchmark and Detection Network. Sensors 2020, 20, 1562. [Google Scholar] [CrossRef] [PubMed]
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and efficient object detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar]
- Loshchilov, I.; Hutter, F. Sgdr: Stochastic gradient descent with warm restarts. arXiv 2016, arXiv:1608.03983. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| YOLOv7 | EfficientDet | |
|---|---|---|
| Data augmentation | Random horizontal flip Random translation | Random horizontal flip |
| Number of parameters | 36.6 M | 3.9 M |
| Learning rate | 0.005 | 0.0001 |
| Batch size | 8 | 8 |
| Optimizer | SGD | Adam |
| Epochs | 130 | 120 |
| Warm-up epochs | 5 | 5 |
| BoF/BoS | Mosaic data augmentation | Cosine annealing scheduler |
| Model (Dataset) | Soft NMS | Exponential NMS | Confluence NMS | Proposed NMS |
|---|---|---|---|---|
| YOLOv7 (NEU-DET) | , | |||
| EfficientDet (NEU-DET) | , | |||
| YOLOv7 (GC10-DET) | , |
| Models (Datasets) | Metrics | Greedy NMS | DIoU NMS | Soft NMS | Exponential NMS | WBF | Confluence NMS | Proposed |
|---|---|---|---|---|---|---|---|---|
| YOLOv7 (NEU-DET) | 0.6642 | 0.6618 | 0.6680 | 0.6697 | 0.6711 | 0.6494 | 0.6791 | |
| 0.6686 | 0.6663 | 0.6768 | 0.6751 | 0.6753 | 0.6518 | 0.6860 | ||
| EfficientDet (NEU-DET) | 0.5947 | 0.5883 | 0.6488 | 0.6566 | 0.5955 | 0.5825 | 0.6604 | |
| 0.6009 | 0.5952 | 0.6491 | 0.6541 | 0.6016 | 0.5908 | 0.6631 | ||
| YOLOv7 (GC10-DET) | 0.6373 | 0.6368 | 0.6346 | 0.6386 | 0.6364 | 0.6032 | 0.6396 | |
| 0.6215 | 0.6214 | 0.6141 | 0.6226 | 0.6198 | 0.5938 | 0.6232 |
| Method | YOLOv7 | EfficientDet | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IR | TA | SRM | ||||||||||||
| - | - | - | 0.5928 | 0.7552 | 0.6642 | 0.6048 | 0.7568 | 0.6686 | 0.4730 | 0.8009 | 0.5947 | 0.4921 | 0.7987 | 0.6009 |
| ✓ | - | - | 0.6031 | 0.7529 | 0.6697 | 0.6162 | 0.7539 | 0.6743 | 0.5233 | 0.7728 | 0.6241 | 0.5405 | 0.7715 | 0.6280 |
| - | ✓ | - | 0.6192 | 0.7447 | 0.6762 | 0.6385 | 0.7457 | 0.6837 | 0.5741 | 0.7482 | 0.6497 | 0.5910 | 0.7455 | 0.6536 |
| - | - | ✓ | 0.6060 | 0.7529 | 0.6715 | 0.6215 | 0.7545 | 0.6777 | 0.4750 | 0.8009 | 0.5963 | 0.4934 | 0.7987 | 0.6021 |
| ✓ | ✓ | - | 0.6257 | 0.7400 | 0.6781 | 0.6428 | 0.7399 | 0.6841 | 0.6024 | 0.7400 | 0.6642 | 0.6152 | 0.7374 | 0.6664 |
| ✓ | - | ✓ | 0.6085 | 0.7517 | 0.6726 | 0.6232 | 0.7526 | 0.6780 | 0.5166 | 0.7810 | 0.6219 | 0.5342 | 0.7799 | 0.6268 |
| - | ✓ | ✓ | 0.6203 | 0.7423 | 0.6759 | 0.6400 | 0.7425 | 0.6831 | 0.5806 | 0.7459 | 0.6529 | 0.5956 | 0.7431 | 0.6562 |
| ✓ | ✓ | ✓ | 0.6258 | 0.7423 | 0.6791 | 0.6445 | 0.7426 | 0.6860 | 0.5954 | 0.7412 | 0.6600 | 0.6106 | 0.7384 | 0.6631 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, S.-H.; Palakonda, V.; Kim, I.-M.; Kang, J.-M.; Yun, S. Enhanced Non-Maximum Suppression for the Detection of Steel Surface Defects. Mathematics 2023, 11, 3898. https://doi.org/10.3390/math11183898
Kang S-H, Palakonda V, Kim I-M, Kang J-M, Yun S. Enhanced Non-Maximum Suppression for the Detection of Steel Surface Defects. Mathematics. 2023; 11(18):3898. https://doi.org/10.3390/math11183898
Chicago/Turabian StyleKang, Seong-Hwan, Vikas Palakonda, Il-Min Kim, Jae-Mo Kang, and Sangseok Yun. 2023. "Enhanced Non-Maximum Suppression for the Detection of Steel Surface Defects" Mathematics 11, no. 18: 3898. https://doi.org/10.3390/math11183898