
An Adaptive Jellyfish Search Algorithm for Packing Items with Conflict
 , , , and
, , , and
Abstract
:1. Introduction
- To our knowledge, the BPPCs problem has not been addressed in the literature as one problem. The existing methods pack the conflict items first and then the non-conflict items as a separate problem. This investigation of packing all the conflict and non-conflict items at one stage is the first of its kind.
- To address the BPPCs, we proposed to utilize the first adapted jellyfish algorithm. The proposed work is provided as an open source code on a GitHub repository (https://github.com/Ahmed-Fathalla/An-Adaptive-Jellyfish-Search-Algorithm-for-Packing-Items-with-Conflict, accessed on 1 June 2023).
- Two solution representation methods have been provided at different levels. Subsequently, a comparison was drawn to answer the question as to whether it is better to represent the BPPCs solution at the item level or bin level.
- The proposed methods were evaluated on a standard dataset with different levels of problem difficulties.
2. Literature Review
3. Problem Formulation
3.1. Description of the Problem
3.2. Mathematical Description of BPPCs
4. The Proposed Adaptive Jellyfish Search Algorithm
4.1. The Artificial Jellyfish Search (JS) Optimizer Algorithm
- In order to travel within the swarm, jellyfish can only travel in one of two directions: with or against the ocean current. A time control system is responsible for the switching between both modes of movement.
- Jellyfish are continuously on the move in search of food; they are often more attracted to regions where food is readily available.
- The objective function and location indicate the food quantities discovered.
4.1.1. Moving in the Ocean Current
4.1.2. Moving inside the Swarm
4.2. The Proposed AJS Item-Wise Level (AJS_I)
- Parameters initialization: Population size , the iteration counter t, the maximum number of iterations , upper and lower number of items, respectively, and bin capacity C.
- A jellyfish representation: Each individual in the population (i.e., JS) represents a solution of the BPPCs, as shown in Figure 2 as an example. This representation can be described by an n-dimensional vector of integer numbers (i.e., ), where the items and bins are identified using indices and values, respectively.Figure 2. A jellyfish representation.
![Mathematics 11 03219 g002]() Figure 2 represents the packing of five items into two bins. Item 1, 3, and 4 are packed into bin 1, while items 2 and 5 are packed into bin 2 according to the capacity constraint of the bins and the conflict constraint among items.
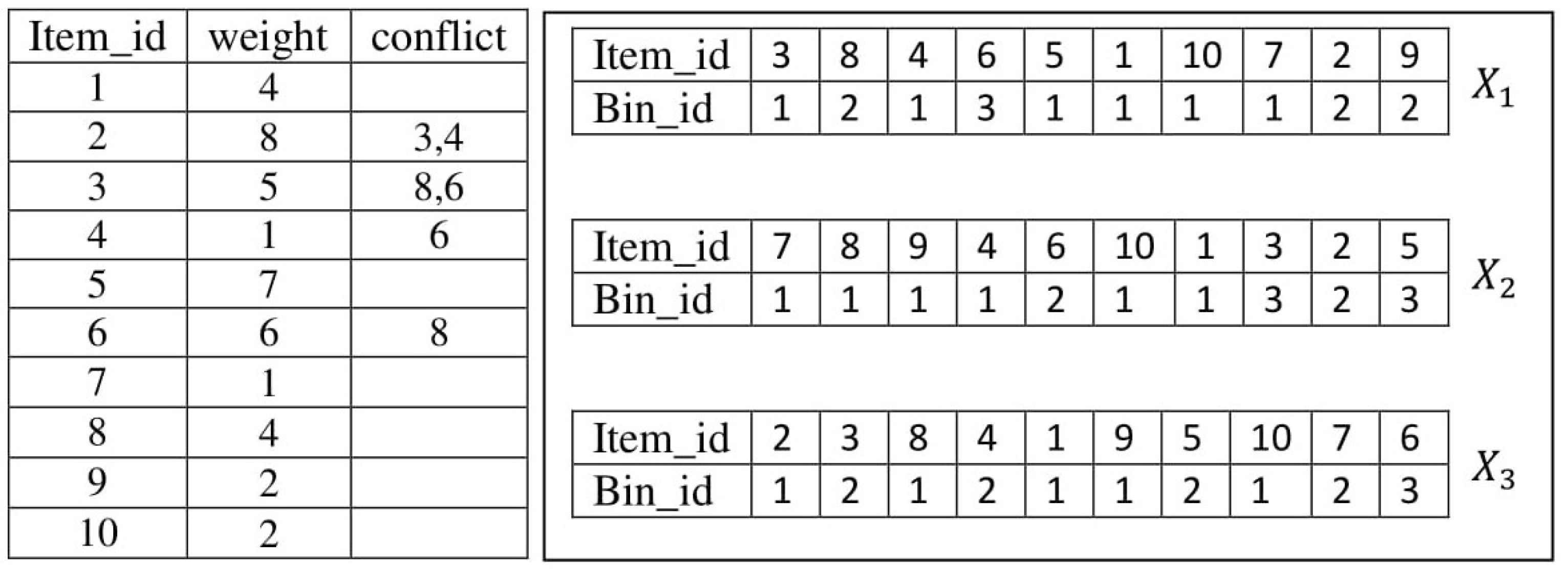
Figure 2 represents the packing of five items into two bins. Item 1, 3, and 4 are packed into bin 1, while items 2 and 5 are packed into bin 2 according to the capacity constraint of the bins and the conflict constraint among items. - Initial population: Each individual is generated randomly based on a specific heuristic for achieving a feasible initial solution. Figure 3 illustrates an example of the initial population of three individuals. The example consists of 10 items , the corresponding weight of each item, the bin capacity , and a conflict set of items.Figure 3. A random initial population.
![Mathematics 11 03219 g003]() Each population solution , is generated by packing a collection of items into a collection of bins without violating any constraint. According to , items 3, 4, 5, 1, 10, and 7 are packed into bin 1 with a total weight of 20 and have no conflicts. Items 8, 2, and 9 are packed into bin 2, with a total weight of 14, and item 6 is packed into bin 3, with a total of 6. The initial random-based-heuristic approach guarantees feasible initial solutions to the BPPCs.
Each population solution , is generated by packing a collection of items into a collection of bins without violating any constraint. According to , items 3, 4, 5, 1, 10, and 7 are packed into bin 1 with a total weight of 20 and have no conflicts. Items 8, 2, and 9 are packed into bin 2, with a total weight of 14, and item 6 is packed into bin 3, with a total of 6. The initial random-based-heuristic approach guarantees feasible initial solutions to the BPPCs. - Individual evaluation: Each jellyfish is evaluated according to the fitness function f at each iteration t, and the one with the smallest fitness value is allocated to the best jellyfish (i.e., in the case of minimization of the objective function). In contrast, the one with the maximum fitness value is assigned to (i.e., in the case of the maximization of the objective function). Although minimizing the number of used bins is a primary goal of the BPP, more than one solution with different packing representations and the same total number of bins may exist. Therefore, there should be other criteria to evaluate the solution in terms of bin utility, as in Equations (21) and (22) for minimization and maximization, respectively.where , is the weight of item l, is the number of items packed into bin b, k is an exponential factor that equals two, and and B is the number of used bins in the solution.
- Individual update: The location of a JF is updated based on the time control mechanism to switch the movement between the ocean current and jellyfish swarm.
- (a)
- In the case where a jellyfish follows the ocean current, Equations (13) and (14) can be rewritten to solve the discrete BPPCs problem as follows:where is a randomly generated number, and is a randomly generated jellyfish. , , and represent the best jellyfish, the current one, and the updated location of at , respectively.The new operators ⊞, ⊡, and ⊟ can be used instead of the standard operators in the JS algorithm. The operator ⊟ represents the difference between two jellyfish in the current population as a set of swaps S. Each swap s can be defined as a raw vector of three elements , where p represents the , q represents the current assigned , and r represents the new assigned . For example, means item 7 can be packed into bin 1 instead of bin 2. Figure 4 illustrates an example as a difference between two individuals (e.g., and ).Figure 4. An example of operator ⊟.
![Mathematics 11 03219 g004]() The ⊡ operator represents the probability of the chosen random number of swaps from the swap set S. Figure 5 illustrates an illustrative example of the results of applying the ⊡ operator. According to the example, if S has five swaps, the generated random integer number is 0.6; then, the result of ⊡ is a randomly selected set of three swaps from the set S.Figure 5. An example of operator ⊡.
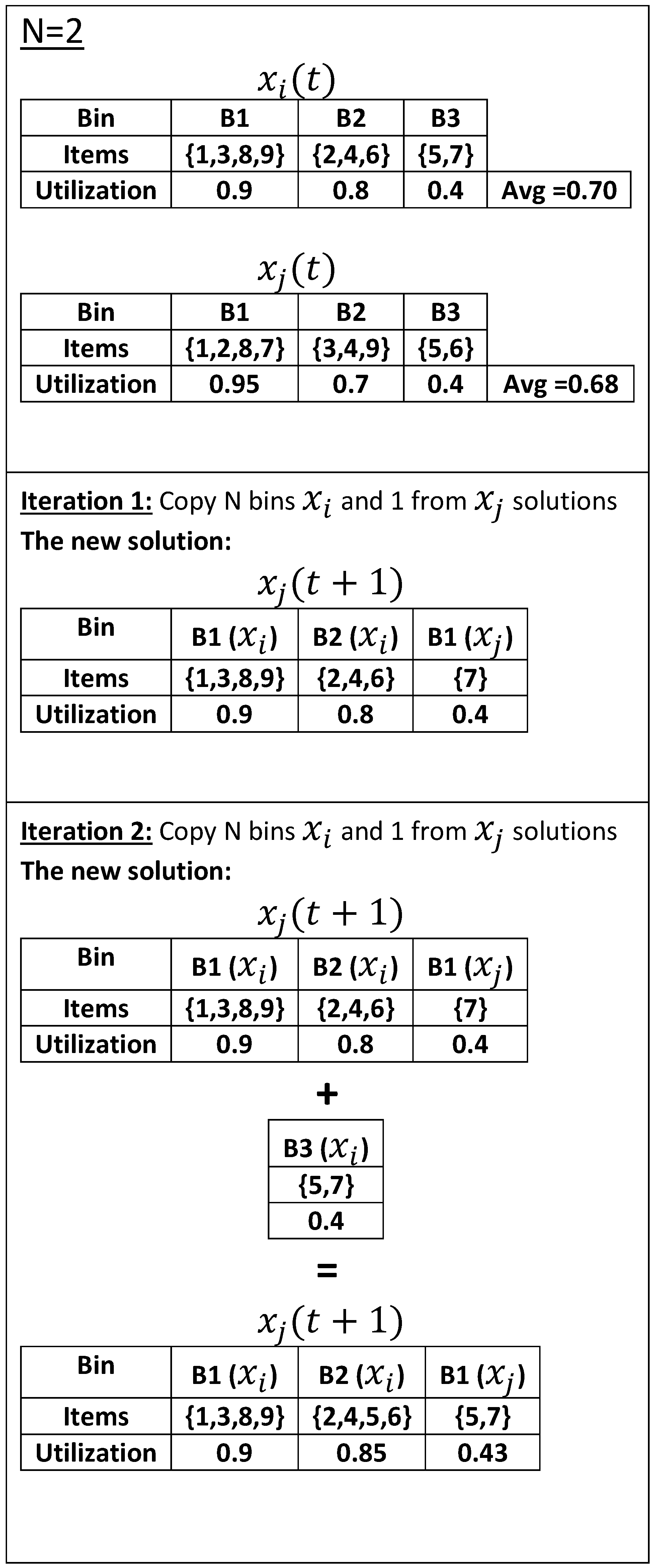
The ⊡ operator represents the probability of the chosen random number of swaps from the swap set S. Figure 5 illustrates an illustrative example of the results of applying the ⊡ operator. According to the example, if S has five swaps, the generated random integer number is 0.6; then, the result of ⊡ is a randomly selected set of three swaps from the set S.Figure 5. An example of operator ⊡.![Mathematics 11 03219 g005]() The ⊞ operator takes a leading role in updating the location of a jellyfish. Therefore, it can be viewed as applying the set of swaps sequentially to the current jellyfish position in the swarm in order to obtain a new position. An illustrative example of the ⊞ operator is shown in Figure 6.Figure 6. An example of operator ⊞.
The ⊞ operator takes a leading role in updating the location of a jellyfish. Therefore, it can be viewed as applying the set of swaps sequentially to the current jellyfish position in the swarm in order to obtain a new position. An illustrative example of the ⊞ operator is shown in Figure 6.Figure 6. An example of operator ⊞.![Mathematics 11 03219 g006]() From the example in Figure 5, item 5 is currently packed into bin number one and can be swapped and packed into a new bin number three. This reassignment can be done with one condition, which is that the new packing does not violate both the capacity and conflict constraints. As for swap (5, 1, 3), the weight of item 5 should be less than or equal to the remaining capacity of bin 3, and item 5 must have no conflict with all the items in bin 3. For the second swap (6, 3, 2), the reassignment satisfies the capacity constraint but violates the conflict constraint, in which item 6 has a conflict with the items’ list in bin two according to Figure 3. In this case, to guarantee a better exploration of a new solution, we apply an Any-Fit (AF) heuristic [26]. The main idea of an AF heuristic is that, for sequential current nonempty bins (i.e., , , …, ), the current item will not be assigned to bin unless it does not fit (i.e., it violates the capacity and conflict constraint) any of the bins in the sequence , , …, . Therefore, item 6 tries to be packed into bin 1 and then tries to be packed into bin 2 (i.e., both bins satisfy the capacity constraint and violate the conflict constraint); then, it remains in bin 3. Item 9 can be reassigned to bin 1 instead of 2, thus satisfying both the capacity and conflict constraint. The remaining capacity and item list for both the current and new bins is updated for any reassignment that is applied.
From the example in Figure 5, item 5 is currently packed into bin number one and can be swapped and packed into a new bin number three. This reassignment can be done with one condition, which is that the new packing does not violate both the capacity and conflict constraints. As for swap (5, 1, 3), the weight of item 5 should be less than or equal to the remaining capacity of bin 3, and item 5 must have no conflict with all the items in bin 3. For the second swap (6, 3, 2), the reassignment satisfies the capacity constraint but violates the conflict constraint, in which item 6 has a conflict with the items’ list in bin two according to Figure 3. In this case, to guarantee a better exploration of a new solution, we apply an Any-Fit (AF) heuristic [26]. The main idea of an AF heuristic is that, for sequential current nonempty bins (i.e., , , …, ), the current item will not be assigned to bin unless it does not fit (i.e., it violates the capacity and conflict constraint) any of the bins in the sequence , , …, . Therefore, item 6 tries to be packed into bin 1 and then tries to be packed into bin 2 (i.e., both bins satisfy the capacity constraint and violate the conflict constraint); then, it remains in bin 3. Item 9 can be reassigned to bin 1 instead of 2, thus satisfying both the capacity and conflict constraint. The remaining capacity and item list for both the current and new bins is updated for any reassignment that is applied. - (b)
- In the case of a jellyfish moving inside a swarm, the individual can move according to type A (i.e., passive) or type B (i.e., active) movement based on a random number that is generated and compared to :
- Type A update: The updating location of a jellyfish (JF) in a passive way can be achieved by rewriting Equation (15) as follows to solve the discrete problem:where is a randomly generated integer number between and in the form of swaps in a set of S. Therefore, , where is the cardinality of a set S. For example, if the and (i.e., the maximum and minimum number of items) and , then . There are three randomly generated swaps in S. This modification in the operators guarantees multiple solutions through randomization. The ⊡ and ⊞ operators can be applied with the same concept as before.
- Stopping criteria: Steps 4 and 5 are repeated for the new population and update the current best jellyfish until a maximum number of iterations is reached or an optimal assignment of items to the BPPCs has been reached.
- Report the best jellyfish, , as the best result so far.





4.3. The Proposed Bin-Wise Level (AJS_B)
| Algorithm 1 The proposed AJS algorithm. |
 |
5. Results and Discussion
5.1. Dataset
5.2. Setup
5.3. Evaluation Metrics
5.4. Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tudosoiu, M.F.; Pop, F. Bin Packing Scheduling Algorithm with Energy Constraints in Cloud Computing. In Proceedings of the 2021 IEEE 17th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 28–30 October 2021; pp. 77–84. [Google Scholar]
- Lin, Y.H.; Lin, C.; Lin, B. On conflict and cooperation in a two-echelon inventory model for deteriorating items. Comput. Ind. Eng. 2010, 59, 703–711. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Nguyen, X.T. Space Splitting and Merging Technique for Online 3-D Bin Packing. Mathematics 2023, 11, 1912. [Google Scholar] [CrossRef]
- Moura, A.; Pinto, T.; Alves, C.; Valério de Carvalho, J. A Matheuristic Approach to the Integration of Three-Dimensional Bin Packing Problem and Vehicle Routing Problem with Simultaneous Delivery and Pickup. Mathematics 2023, 11, 713. [Google Scholar] [CrossRef]
- Labrada-Nueva, Y.; Cruz-Rosales, M.H.; Rendón-Mancha, J.M.; Rivera-López, R.; Eraña-Díaz, M.L.; Cruz-Chávez, M.A. Overlap detection in 2D amorphous shapes for paper optimization in digital printing presses. Mathematics 2021, 9, 1033. [Google Scholar] [CrossRef]
- Mandal, C.A.; Chakrabarti, P.P.; Ghose, S. Complexity of fragmentable object bin packing and an application. Comput. Math. Appl. 1998, 35, 91–97. [Google Scholar] [CrossRef] [Green Version]
- Shachnai, H.; Tamir, T.; Yehezkely, O. Approximation schemes for packing with item fragmentation. Theory Comput. Syst. 2008, 43, 81–98. [Google Scholar] [CrossRef] [Green Version]
- Byholm, B.; Porres, I. Fast algorithms for fragmentable items bin packing. J. Heuristics 2018, 24, 697–723. [Google Scholar] [CrossRef]
- Archetti, C.; Bianchessi, N.; Speranza, M.G. Branch-and-cut algorithms for the split delivery vehicle routing problem. Eur. J. Oper. Res. 2014, 238, 685–698. [Google Scholar] [CrossRef]
- Casazza, M.; Ceselli, A. Mathematical programming algorithms for bin packing problems with item fragmentation. Comput. Oper. Res. 2014, 46, 1–11. [Google Scholar] [CrossRef]
- Epstein, L.; Levin, A.; Van Stee, R. Approximation schemes for packing splittable items with cardinality constraints. Algorithmica 2012, 62, 102–129. [Google Scholar] [CrossRef]
- Casazza, M.; Ceselli, A. Exactly solving packing problems with fragmentation. Comput. Oper. Res. 2016, 75, 202–213. [Google Scholar] [CrossRef]
- Laporte, G.; Desroches, S. Examination timetabling by computer. Comput. Oper. Res. 1984, 11, 351–360. [Google Scholar] [CrossRef]
- Mingozzi, A. Loading Problems. In Combinatorial Optimization; 1979; p. 339. Available online: https://pubsonline.informs.org/doi/abs/10.1287/inte.11.5.113 (accessed on 29 May 2023).
- Jansen, K. An approximation scheme for bin packing with conflicts. J. Comb. Optim. 1999, 3, 363–377. [Google Scholar] [CrossRef]
- Sadykov, R.; Vanderbeck, F. Bin packing with conflicts: A generic branch-and-price algorithm. INFORMS J. Comput. 2013, 25, 244–255. [Google Scholar] [CrossRef] [Green Version]
- Minton, S.; Johnston, M.D.; Philips, A.B.; Laird, P. Minimizing conflicts: A heuristic repair method for constraint satisfaction and scheduling problems. Artif. Intell. 1992, 58, 161–205. [Google Scholar] [CrossRef] [Green Version]
- Balogh, J.; Békési, J.; Galambos, G. New lower bounds for certain classes of bin packing algorithms. Theor. Comput. Sci. 2012, 440, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Muritiba, A.E.F.; Iori, M.; Malaguti, E.; Toth, P. Algorithms for the bin packing problem with conflicts. INFORMS J. Comput. 2010, 22, 401–415. [Google Scholar] [CrossRef]
- Gendreau, M.; Laporte, G.; Semet, F. Heuristics and lower bounds for the bin packing problem with conflicts. Comput. Oper. Res. 2004, 31, 347–358. [Google Scholar] [CrossRef]
- Elhedhli, S.; Li, L.; Gzara, M.; Naoum-Sawaya, J. A branch-and-price algorithm for the bin packing problem with conflicts. INFORMS J. Comput. 2011, 23, 404–415. [Google Scholar] [CrossRef]
- Khanafer, A.; Clautiaux, F.; Talbi, E.G. New lower bounds for bin packing problems with conflicts. Eur. J. Oper. Res. 2010, 206, 281–288. [Google Scholar] [CrossRef]
- Gogos, C.; Alefragis, P.; Housos, E. An improved multi-staged algorithmic process for the solution of the examination timetabling problem. Ann. Oper. Res. 2012, 194, 203–221. [Google Scholar] [CrossRef]
- Antal, M.; Pop, C.; Cioara, T.; Anghel, I.; Salomie, I.; Pop, F. A system of systems approach for data centers optimization and integration into smart energy grids. Future Gener. Comput. Syst. 2020, 105, 948–963. [Google Scholar] [CrossRef]
- Garey, M.R.; Johnson, D.S. Computers and Intractability; Freeman: San Francisco, CA, USA, 1979; Volume 174. [Google Scholar]
- Coffman, E.G., Jr.; Csirik, J.; Galambos, G.; Martello, S.; Vigo, D. Bin Packing Approximation Algorithms: Survey and Classification; Springer: New York, NY, USA, 2013; pp. 455–531. [Google Scholar]
- Delorme, M.; Iori, M.; Martello, S. Bin packing and cutting stock problems: Mathematical models and exact algorithms. Eur. J. Oper. Res. 2016, 255, 1–20. [Google Scholar] [CrossRef]
- Epstein, L.; Levin, A. On bin packing with conflicts. SIAM J. Optim. 2008, 19, 1270–1298. [Google Scholar] [CrossRef]
- Dósa, G.; Sgall, J. First Fit bin packing: A tight analysis. In Proceedings of the 30th International Symposium on Theoretical Aspects of Computer Science (STACS 2013), Kiel, Germany, 27 February–2 March 2013. [Google Scholar]
- Fathalla, A.; Li, K.; Salah, A. Best-KFF: A multi-objective preemptive resource allocation policy for cloud computing systems. Clust. Comput. 2022, 25, 321–336. [Google Scholar] [CrossRef]
- Martello, S.; Toth, P. Lower bounds and reduction procedures for the bin packing problem. Discret. Appl. Math. 1990, 28, 59–70. [Google Scholar] [CrossRef]
- Scholl, A.; Klein, R.; Jürgens, C. Bison: A fast hybrid procedure for exactly solving the one-dimensional bin packing problem. Comput. Oper. Res. 1997, 24, 627–645. [Google Scholar] [CrossRef]
- Brandao, F.; Pedroso, J.P. Bin packing and related problems: General arc-flow formulation with graph compression. Comput. Oper. Res. 2016, 69, 56–67. [Google Scholar] [CrossRef] [Green Version]
- De Carvalho, J.V. Exact solution of bin-packing problems using column generation and branch-and-bound. Ann. Oper. Res. 1999, 86, 629–659. [Google Scholar] [CrossRef]
- Bourjolly, J.M.; Rebetez, V. An analysis of lower bound procedures for the bin packing problem. Comput. Oper. Res. 2005, 32, 395–405. [Google Scholar] [CrossRef]
- Stawowy, A. Evolutionary based heuristic for bin packing problem. Comput. Ind. Eng. 2008, 55, 465–474. [Google Scholar] [CrossRef]
- Loh, K.H.; Golden, B.; Wasil, E. Solving the one-dimensional bin packing problem with a weight annealing heuristic. Comput. Oper. Res. 2008, 35, 2283–2291. [Google Scholar] [CrossRef]
- Kucukyilmaz, T.; Kiziloz, H.E. Cooperative parallel grouping genetic algorithm for the one-dimensional bin packing problem. Comput. Ind. Eng. 2018, 125, 157–170. [Google Scholar] [CrossRef]
- Galinier, P.; Hao, J.K. Hybrid evolutionary algorithms for graph coloring. J. Comb. Optim. 1999, 3, 379–397. [Google Scholar] [CrossRef] [Green Version]
- Morgenstern, C. Distributed coloration neighborhood search. Discret. Math. Theor. Comput. Sci. 1996, 26, 335–358. [Google Scholar]
- Falkenauer, E. A hybrid grouping genetic algorithm for bin packing. J. Heuristics 1996, 2, 5–30. [Google Scholar] [CrossRef] [Green Version]
- Fleszar, K.; Charalambous, C. Average-weight-controlled bin-oriented heuristics for the one-dimensional bin-packing problem. Eur. J. Oper. Res. 2011, 210, 176–184. [Google Scholar] [CrossRef]
- Quiroz-Castellanos, M.; Cruz-Reyes, L.; Torres-Jimenez, J.; Gómez, C.; Huacuja, H.J.F.; Alvim, A.C. A grouping genetic algorithm with controlled gene transmission for the bin packing problem. Comput. Oper. Res. 2015, 55, 52–64. [Google Scholar] [CrossRef]
- Chou, J.S.; Truong, D.N. A novel metaheuristic optimizer inspired by behavior of jellyfish in ocean. Appl. Math. Comput. 2021, 389, 125535. [Google Scholar] [CrossRef]
- Fossette, S.; Putman, N.F.; Lohmann, K.J.; Marsh, R.; Hays, G.C. A biologist’s guide to assessing ocean currents: A review. Mar. Ecol. Prog. Ser. 2012, 457, 285–301. [Google Scholar] [CrossRef] [Green Version]
- Fossette, S.; Gleiss, A.C.; Chalumeau, J.; Bastian, T.; Armstrong, C.D.; Vandenabeele, S.; Karpytchev, M.; Hays, G.C. Current-oriented swimming by jellyfish and its role in bloom maintenance. Curr. Biol. 2015, 25, 342–347. [Google Scholar] [CrossRef] [Green Version]
- Mariottini, G.L.; Pane, L. Mediterranean jellyfish venoms: A review on scyphomedusae. Mar. Drugs 2010, 8, 1122–1152. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brotz, L.; Cheung, W.W.; Kleisner, K.; Pakhomov, E.; Pauly, D. Increasing jellyfish populations: Trends in large marine ecosystems. In Jellyfish Blooms IV; Springer: Berlin/Heidelberg, Germany, 2012; pp. 3–20. [Google Scholar]
- Dong, Z.; Liu, D.; Keesing, J.K. Jellyfish blooms in China: Dominant species, causes and consequences. Mar. Pollut. Bull. 2010, 60, 954–963. [Google Scholar] [CrossRef] [PubMed]
- Zavodnik, D. Spatial aggregations of the swarming jellyfish Pelagia noctiluca (Scyphozoa). Mar. Biol. 1987, 94, 265–269. [Google Scholar] [CrossRef]
- Kiran, M.S.; Hakli, H.; Gunduz, M.; Uguz, H. Artificial bee colony algorithm with variable search strategy for continuous optimization. Inf. Sci. 2015, 300, 140–157. [Google Scholar] [CrossRef]
- BPPC Dataset. Available online: http://or.dei.unibo.it/library/bin-packing-problem-conflicts (accessed on 5 September 2021).
- Johnson, D.S.; Demers, A.J.; Ullman, J.D.; Garey, M.R.; Graham, R.L. Worst-Case Performance Bounds for Simple One-Dimensional Packing Algorithms. SIAM J. Comput. 1974, 3, 299–325. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Yan, J.; He, W.; Jiang, X.; Zhang, Z. A novel phase performance evaluation method for particle swarm optimization algorithms using velocity-based state estimation. Appl. Soft Comput. 2017, 57, 517–525. [Google Scholar] [CrossRef]
- Venkata Rao, R. Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int. J. Ind. Eng. Comput. 2016, 7, 19–34. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | BPPC Method | Methodology | Objectives and Results |
|---|---|---|---|
| [36] | Weight Annealing Methodology | Using the WA concept, develops a straightforward procedure for the one-dimensional BPP. | Covered the majority of relevant Hadoop constraints and achieved comparable performance with FIFO and Fair Schedulers. |
| [37] | Multi-Capacity Bin Packing Problems (MCBPP) and Machine Reassignment Problems (MRP) | Multi-Start Iterated Local Search (MS-ILS-PPs) | Maximized machine utilization and cost-efficient task reassignment, improved upper bounds and achieved near-optimal solutions. |
| [38] | The Island-Parallel Grouping Genetic Algorithm (IPGGA) | Creates a parallelized version of an evolutionary algorithm for the 1DBPP. Evaluates different model parameters. | Achieved optimal solutions for 23 of 28 instances of the Hard28 dataset, thus outperforming earlier models. Results showed that, for widely distributed computing, dynamic communication topologies are more suitable. |
| [43] | One-Dimensional Bin Packing Problem (BPP) | Grouping Genetic Algorithm with Controlled Gene Transmission (GGA-CGT) | The GGA-CGT was created to promote the transmission of the best genes of the chromosomes and to explore the search space while balancing selective pressure and population diversity to prevent premature convergence. With respect to the Hard28 set, the method outperformed state-of-the-art algorithms. |
| 0 | ||||||||||
| 0 |
| Instance No. | Maximum Degree (D) | Optimal No. of Bins () |
|---|---|---|
| BPPC_1_1_1 | 18 | 48 |
| BPPC_1_2_5 | 41 | 50 |
| BPPC_1_3_3 | 73 | 46 |
| BPPC_1_4_2 | 96 | 53 |
| BPPC_1_5_5 | 119 | 57 |
| BPPC_1_6_3 | 119 | 75 |
| BPPC_1_7_2 | 119 | 91 |
| BPPC_1_8_6 | 119 | 99 |
| BPPC_1_9_4 | 119 | 110 |
| Instance No. | Maximum Degree (D) | Optimal No. of Bins () |
|---|---|---|
| BPPC_2_1_3 | 40 | 102 |
| BPPC_2_2_2 | 99 | 100 |
| BPPC_2_3_5 | 149 | 101 |
| BPPC_2_4_6 | 199 | 109 |
| BPPC_2_5_7 | 249 | 126 |
| BPPC_2_6_7 | 249 | 147 |
| BPPC_2_7_5 | 249 | 181 |
| BPPC_2_8_5 | 249 | 205 |
| BPPC_2_9_2 | 249 | 225 |
| Instance No. | Maximum Degree (D) | Optimal No. of Bins () |
|---|---|---|
| BPPC_3_1_3 | 105 | 202 |
| BPPC_3_2_1 | 207 | 198 |
| BPPC_3_3_9 | 296 | 196 |
| BPPC_3_4_5 | 393 | 206 |
| BPPC_3_5_8 | 499 | 241 |
| BPPC_3_6_4 | 499 | 307 |
| BPPC_3_7_5 | 499 | 343 |
| BPPC_3_8_5 | 499 | 400 |
| BPPC_3_9_2 | 499 | 444 |
| Algorithm | Parameters | Definition | Value |
|---|---|---|---|
| PSO | and | The acceleration coefficients | 2 |
| Jaya | and | Learning parameters | |
| AJS | Switching parameter | ||
| A motion coefficient |
| Instance No. | FF | BF | AJS_I | AJS_B | ||||
|---|---|---|---|---|---|---|---|---|
| Min. | Max. | Avg. ± Std. | Min. | Max. | Avg. ± Std. | |||
| BPPC_1_1_1 | 0.132 | 0.107 | 0.068 | 0.071 | 0.070 ± 0.001 | 0.033 | 0.033 | 0.033 ± 0.000 |
| BPPC_1_2_5 | 0.109 | 0.109 | 0.066 | 0.072 | 0.069 ± 0.003 | 0.037 | 0.038 | 0.038 ± 0.000 |
| BPPC_1_3_3 | 0.223 | 0.198 | 0.094 | 0.097 | 0.095 ± 0.001 | 0.056 | 0.104 | 0.080 ± 0.017 |
| BPPC_1_4_2 | 0.266 | 0.267 | 0.191 | 0.207 | 0.197 ± 0.006 | 0.195 | 0.220 | 0.210 ± 0.009 |
| BPPC_1_5_5 | 0.297 | 0.268 | 0.225 | 0.250 | 0.239 ± 0.011 | 0.229 | 0.250 | 0.236 ± 0.008 |
| BPPC_1_6_3 | 0.586 | 0.583 | 0.561 | 0.572 | 0.568 ± 0.004 | 0.550 | 0.589 | 0.567 ± 0.015 |
| BPPC_1_7_2 | 0.677 | 0.665 | 0.655 | 0.664 | 0.661 ± 0.004 | 0.647 | 0.650 | 0.649 ± 0.001 |
| BPPC_1_8_6 | 0.734 | 0.730 | 0.714 | 0.718 | 0.716 ± 0.002 | 0.716 | 0.722 | 0.719 ± 0.002 |
| BPPC_1_9_4 | 0.775 | 0.776 | 0.770 | 0.772 | 0.771 ± 0.001 | 0.766 | 0.770 | 0.769 ± 0.002 |
| Average | 0.422 | 0.411 | 0.372 | 0.359 | ||||
| Instance No. | Optimal | FF | BF | AJS_I | AJS_B | ||||
|---|---|---|---|---|---|---|---|---|---|
| BPPC_1_1_1 | 48 | 51 | 0.059 | 50 | 0.040 | 49 | 0.020 | 48 | 0.000 |
| BPPC_1_2_5 | 50 | 52 | 0.038 | 52 | 0.038 | 51 | 0.020 | 50 | 0.000 |
| BPPC_1_3_3 | 46 | 53 | 0.132 | 52 | 0.115 | 48 | 0.042 | 47 | 0.021 |
| BPPC_1_4_2 | 53 | 58 | 0.086 | 59 | 0.102 | 55 | 0.036 | 56 | 0.054 |
| BPPC_1_5_5 | 57 | 60 | 0.050 | 60 | 0.050 | 58 | 0.017 | 59 | 0.034 |
| BPPC_1_6_3 | 75 | 79 | 0.051 | 80 | 0.063 | 77 | 0.026 | 77 | 0.026 |
| BPPC_1_7_2 | 91 | 93 | 0.022 | 93 | 0.022 | 91 | 0.000 | 91 | 0.000 |
| BPPC_1_8_6 | 99 | 102 | 0.029 | 102 | 0.029 | 99 | 0.000 | 100 | 0.010 |
| BPPC_1_9_4 | 110 | 111 | 0.009 | 111 | 0.009 | 110 | 0.000 | 110 | 0.000 |
| Average | 0.053 | 0.052 | 0.018 | 0.016 | |||||
| instance_id | AJS | Jaya | PSO | |
|---|---|---|---|---|
| BPPC_1_1_1 | Min. | 0.033 | 0.062 | 0.432 |
| Max. | 0.033 | 0.071 | 0.469 | |
| Avg. ± Std. | 0.033 ± 0.000 | 0.066 ± 0.001 | 0.455 ± 0.014 | |
| BPPC_1_2_5 | Min. | 0.037 | 0.065 | 0.474 |
| Max. | 0.038 | 0.068 | 0.485 | |
| Avg. ± Std. | 0.038 ± 0.000 | 0.066 ± 0.017 | 0.480 ± 0.005 | |
| BPPC_1_3_3 | Min. | 0.056 | 0.098 | 0.522 |
| Max. | 0.104 | 0.144 | 0.555 | |
| Avg. ± Std. | 0.080 ± 0.017 | 0.121 ± 0.011 | 0.543 ± 0.014 | |
| BPPC_1_4_2 | Min. | 0.191 | 0.210 | 0.578 |
| Max. | 0.207 | 0.240 | 0.595 | |
| Avg. ± Std. | 0.197 ± 0.006 | 0.229 ± 0.014 | 0.589 ± 0.007 | |
| BPPC_1_5_5 | Min. | 0.225 | 0.247 | 0.583 |
| Max. | 0.250 | 0.281 | 0.628 | |
| Avg. ± Std. | 0.239 ± 0.004 | 0.270 ± 0.003 | 0.610 ± 0.019 | |
| BPPC_1_6_3 | Min. | 0.561 | 0.566 | 0.726 |
| Max. | 0.572 | 0.572 | 0.739 | |
| Avg. ± Std. | 0.568 ± 0.004 | 0.569 ± 0.000 | 0.734 ± 0.006 | |
| BPPC_1_7_2 | Min. | 0.655 | 0.661 | 0.749 |
| Max. | 0.664 | 0.661 | 0.757 | |
| Avg. ± Std. | 0.661 ± 0.004 | 0.661 ± 0.002 | 0.753 ± 0.004 | |
| BPPC_1_8_6 | Min. | 0.714 | 0.716 | 0.785 |
| Max. | 0.718 | 0.721 | 0.791 | |
| Avg. ± Std. | 0.716 ± 0.002 | 0.719 ± 0.001 | 0.787 ± 0.003 | |
| BPPC_1_9_4 | Min. | 0.770 | 0.770 | 0.795 |
| Max. | 0.772 | 0.772 | 0.798 | |
| Avg. ± Std. | 0.771 ± 0.001 | 0.771 ± 0.004 | 0.797 ± 0.001 | |
| Average | Min. | 0.360 | 0.377 | 0.627 |
| Instance No. | Optimal | AJS | Jaya | PSO | |||
|---|---|---|---|---|---|---|---|
| BPPC_1_1_1 | 48 | 48 | 0.000 | 49 | 0.020 | 65 | 0.262 |
| BPPC_1_2_5 | 50 | 50 | 0.000 | 51 | 0.020 | 71 | 0.296 |
| BPPC_1_3_3 | 46 | 48 | 0.042 | 48 | 0.042 | 70 | 0.343 |
| BPPC_1_4_2 | 53 | 55 | 0.036 | 56 | 0.054 | 79 | 0.329 |
| BPPC_1_5_5 | 57 | 58 | 0.017 | 59 | 0.034 | 82 | 0.305 |
| BPPC_1_6_3 | 75 | 77 | 0.026 | 78 | 0.038 | 96 | 0.219 |
| BPPC_1_7_2 | 91 | 91 | 0.000 | 91 | 0.000 | 104 | 0.125 |
| BPPC_1_8_2 | 99 | 99 | 0.000 | 100 | 0.010 | 112 | 0.116 |
| BPPC_1_9_4 | 110 | 110 | 0.000 | 110 | 0.000 | 115 | 0.043 |
| Average | 0.013 | 0.024 | 0.226 | ||||
| Algorithm | Average | Class No. | |
|---|---|---|---|
| Class 2 | Class 3 | ||
| FF | 0.402 | 0.371 | |
| BF | 0.403 | 0.370 | |
| AJS | Min. | 0.343 | 0.326 |
| Max. | 0.350 | 0.331 | |
| Avg. ± Std. | 0.346 ± 0.003 | 0.329 ± 0.002 | |
| Jaya | Min. | 0.365 | 0.355 |
| Max. | 0.374 | 0.360 | |
| Avg. ± Std. | 0.371 ± 0.003 | 0.358 ± 0.002 | |
| PSO | Min. | 0.636 | 0.641 |
| Max. | 0.651 | 0.653 | |
| Avg. ± Std. | 0.644 ± 0.006 | 0.647 ± 0.005 | |
| Instance No. | FF | BF | AJS | Jaya | PSO | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| BPPC_2_1_3 | 109 | 0.064 | 110 | 0.073 | 102 | 0.000 | 104 | 0.019 | 144 | 0.292 |
| BPPC_2_2_2 | 108 | 0.074 | 108 | 0.074 | 100 | 0.000 | 102 | 0.020 | 144 | 0.306 |
| BPPC_2_3_5 | 110 | 0.082 | 109 | 0.073 | 102 | 0.010 | 105 | 0.038 | 152 | 0.336 |
| BPPC_2_4_6 | 117 | 0.068 | 118 | 0.076 | 111 | 0.018 | 116 | 0.060 | 170 | 0.359 |
| BPPC_2_5_7 | 132 | 0.045 | 136 | 0.074 | 129 | 0.023 | 132 | 0.045 | 181 | 0.304 |
| BPPC_2_6_7 | 156 | 0.058 | 158 | 0.070 | 152 | 0.033 | 155 | 0.052 | 200 | 0.265 |
| BPPC_2_7_5 | 186 | 0.027 | 188 | 0.037 | 182 | 0.005 | 185 | 0.022 | 219 | 0.174 |
| BPPC_2_8_5 | 209 | 0.019 | 210 | 0.024 | 207 | 0.010 | 208 | 0.014 | 234 | 0.124 |
| BPPC_2_9_2 | 228 | 0.013 | 229 | 0.017 | 226 | 0.004 | 226 | 0.004 | 242 | 0.070 |
| BPPC_3_1_3 | 212 | 0.047 | 211 | 0.043 | 203 | 0.005 | 209 | 0.033 | 296 | 0.318 |
| BPPC_3_2_1 | 211 | 0.062 | 210 | 0.057 | 199 | 0.005 | 205 | 0.034 | 298 | 0.336 |
| BPPC_3_3_9 | 209 | 0.062 | 209 | 0.062 | 197 | 0.005 | 205 | 0.044 | 307 | 0.362 |
| BPPC_3_4_5 | 226 | 0.088 | 231 | 0.108 | 216 | 0.046 | 223 | 0.076 | 336 | 0.387 |
| BPPC_3_5_8 | 253 | 0.047 | 260 | 0.073 | 251 | 0.040 | 259 | 0.069 | 364 | 0.338 |
| BPPC_3_6_4 | 312 | 0.016 | 318 | 0.035 | 310 | 0.010 | 316 | 0.028 | 405 | 0.242 |
| BPPC_3_7_5 | 360 | 0.047 | 364 | 0.058 | 351 | 0.023 | 355 | 0.034 | 436 | 0.213 |
| BPPC_3_8_3 | 410 | 0.024 | 412 | 0.029 | 405 | 0.012 | 410 | 0.024 | 468 | 0.145 |
| BPPC_3_9_5 | 448 | 0.009 | 451 | 0.016 | 446 | 0.004 | 449 | 0.011 | 484 | 0.083 |
| Average | 0.047 | 0.055 | 0.014 | 0.035 | 0.258 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Ashmawi, W.H.; Salah, A.; Bekhit, M.; Xiao, G.; Al Ruqeishi, K.; Fathalla, A. An Adaptive Jellyfish Search Algorithm for Packing Items with Conflict. Mathematics 2023, 11, 3219. https://doi.org/10.3390/math11143219
El-Ashmawi WH, Salah A, Bekhit M, Xiao G, Al Ruqeishi K, Fathalla A. An Adaptive Jellyfish Search Algorithm for Packing Items with Conflict. Mathematics. 2023; 11(14):3219. https://doi.org/10.3390/math11143219
Chicago/Turabian StyleEl-Ashmawi, Walaa H., Ahmad Salah, Mahmoud Bekhit, Guoqing Xiao, Khalil Al Ruqeishi, and Ahmed Fathalla. 2023. "An Adaptive Jellyfish Search Algorithm for Packing Items with Conflict" Mathematics 11, no. 14: 3219. https://doi.org/10.3390/math11143219