
An Efficient Numerical Approach for Solving Systems of Fractional Problems and Their Applications in Science

Abstract
:1. Introduction
2. Preliminaries
3. Method of Solution
4. Convergence Analysis
- is pointwise convergent to .
- is pointwise convergent to .
- is pointwise convergent to .
5. Numerical Results
5.1. Clock Reaction of Vitamin C
5.2. System of Riccati Equations
5.3. Optimal Control Problem
6. Conclusions and Discussion of the Results
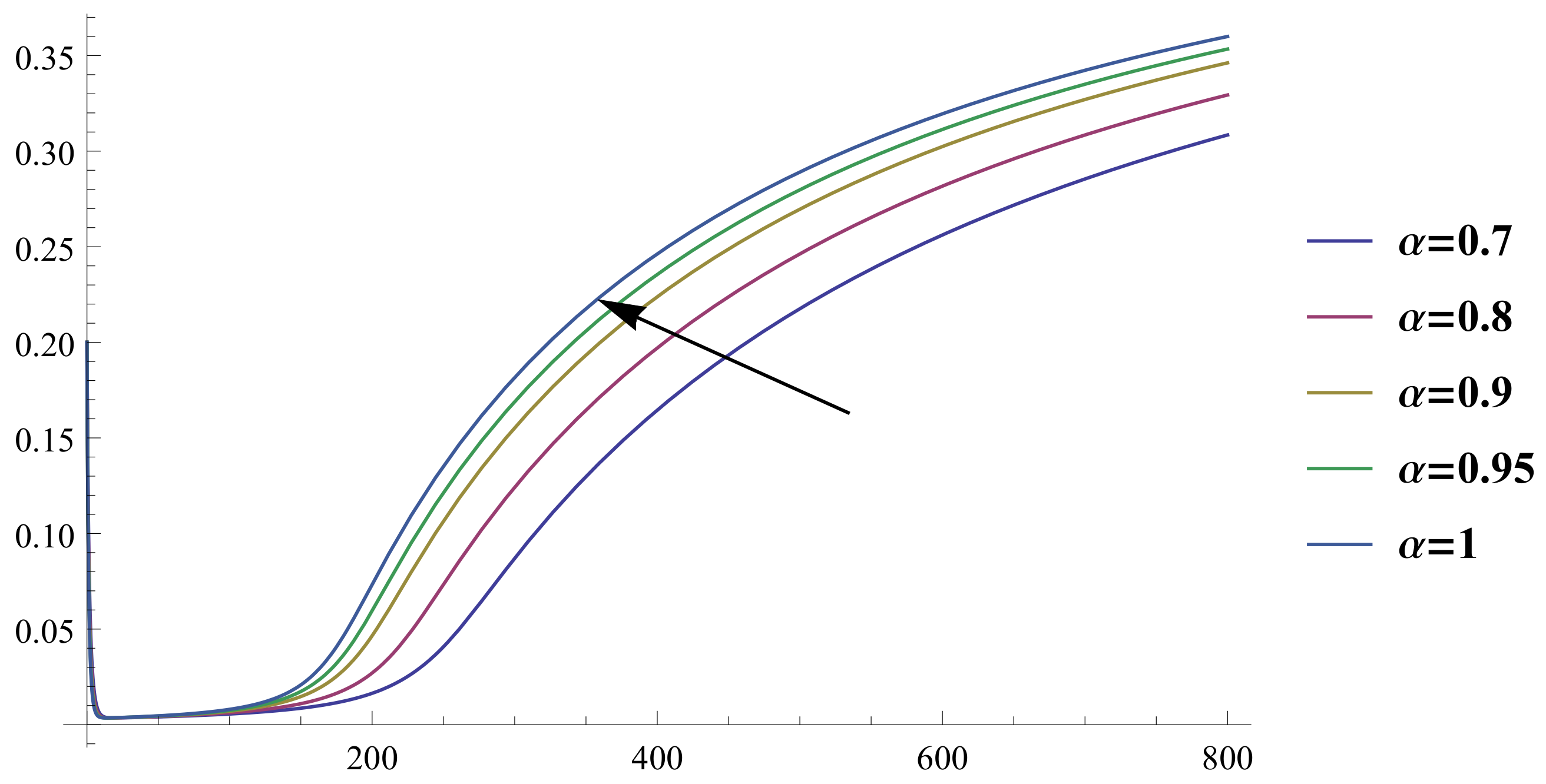
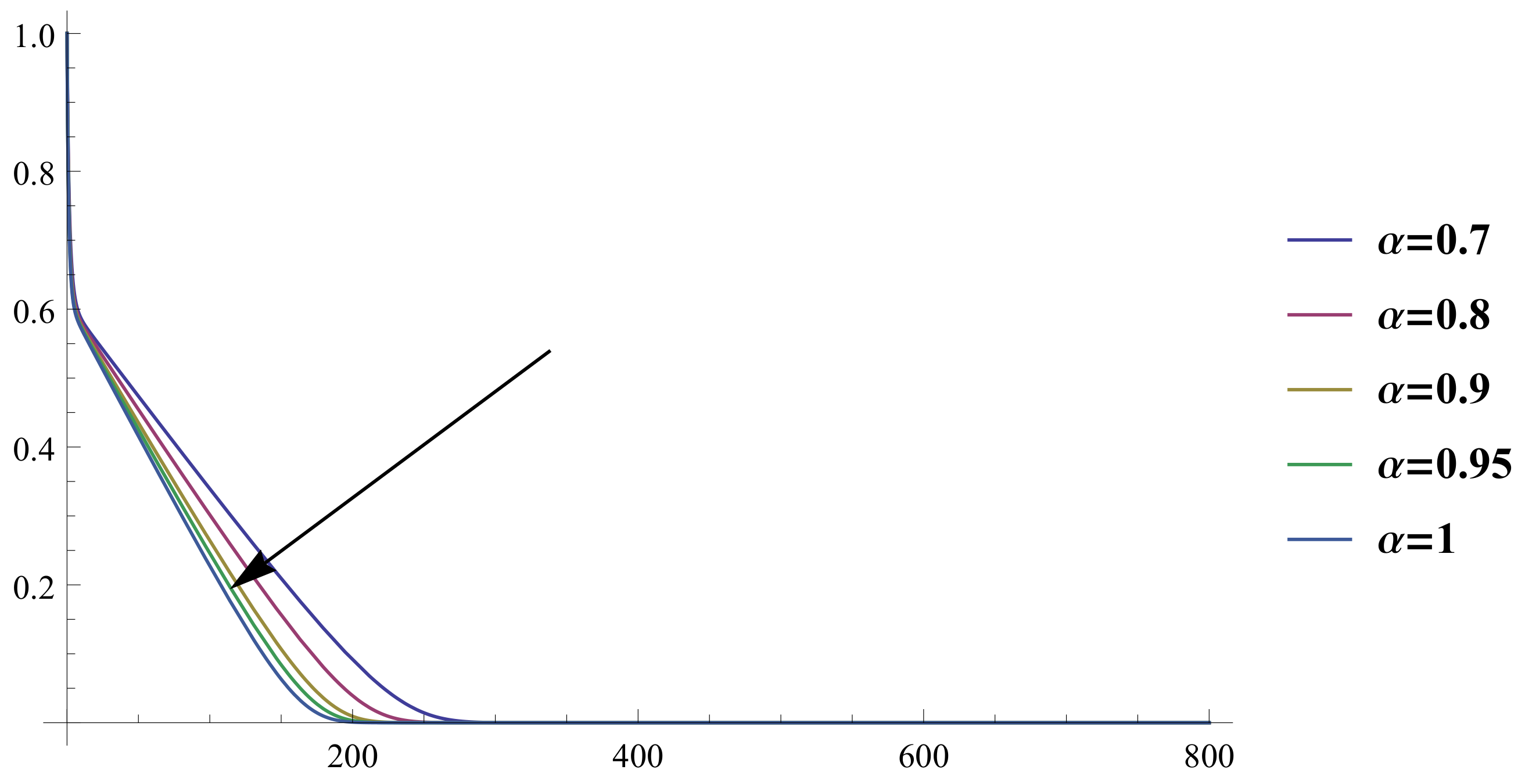
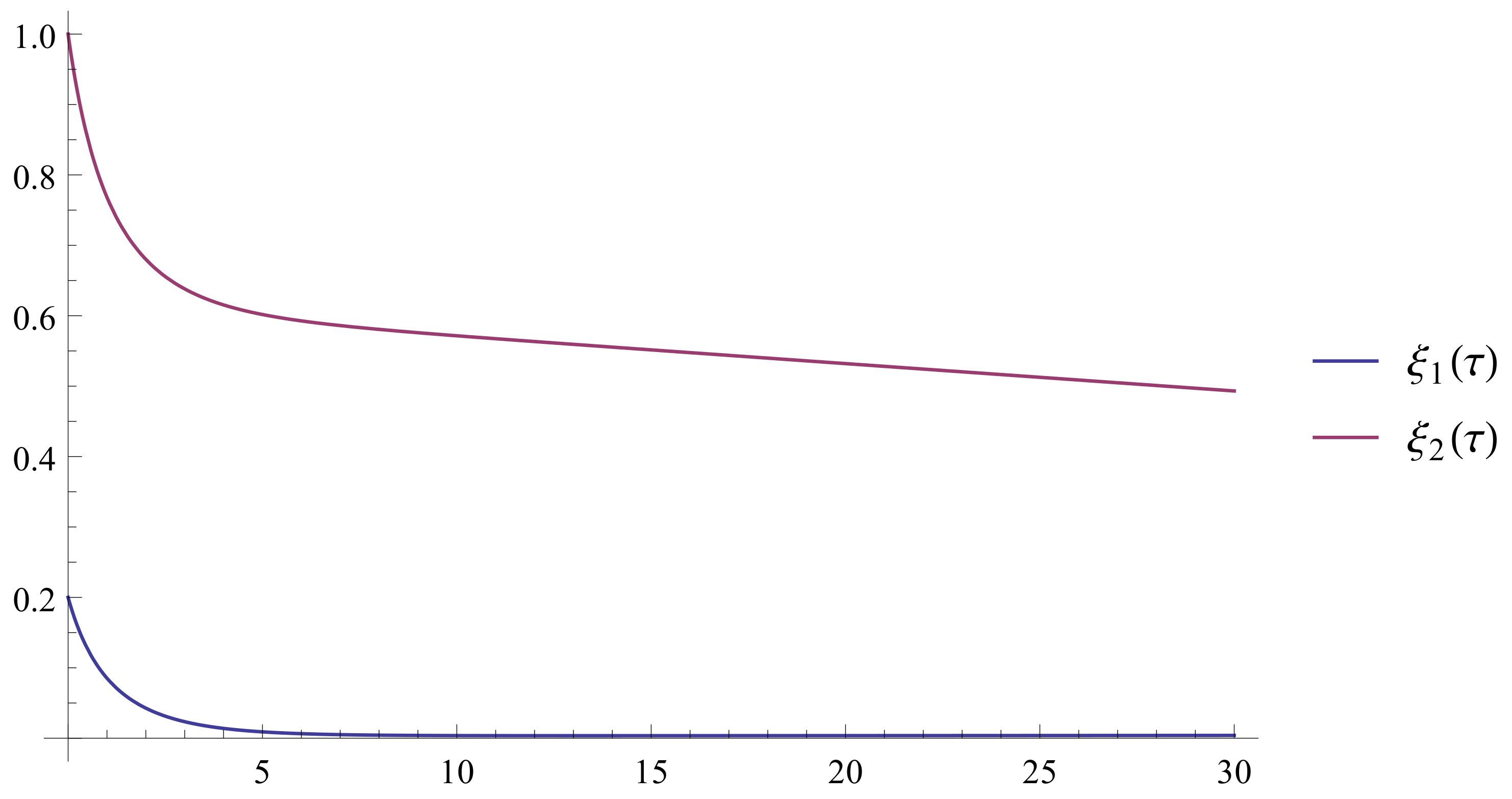
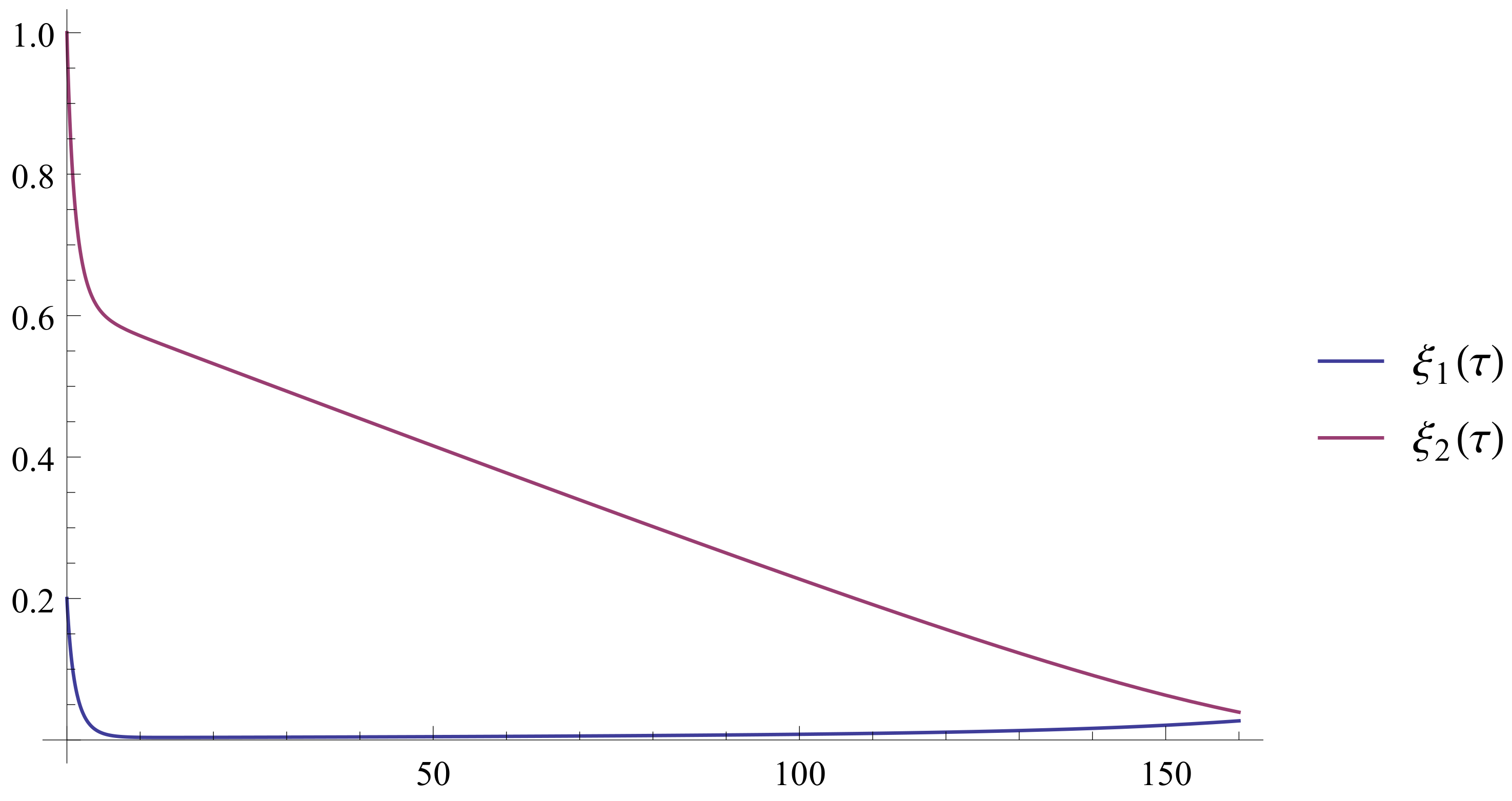
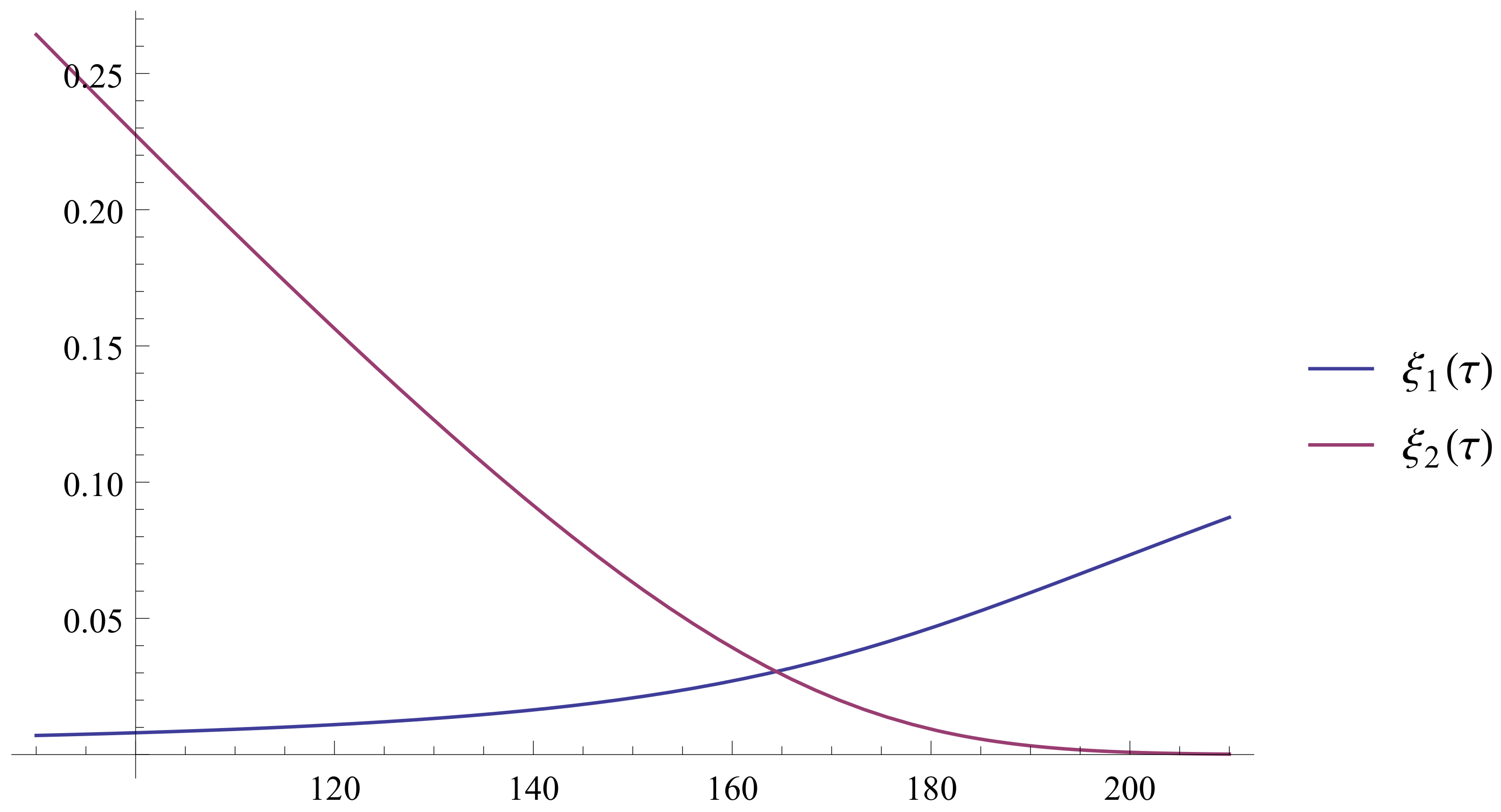
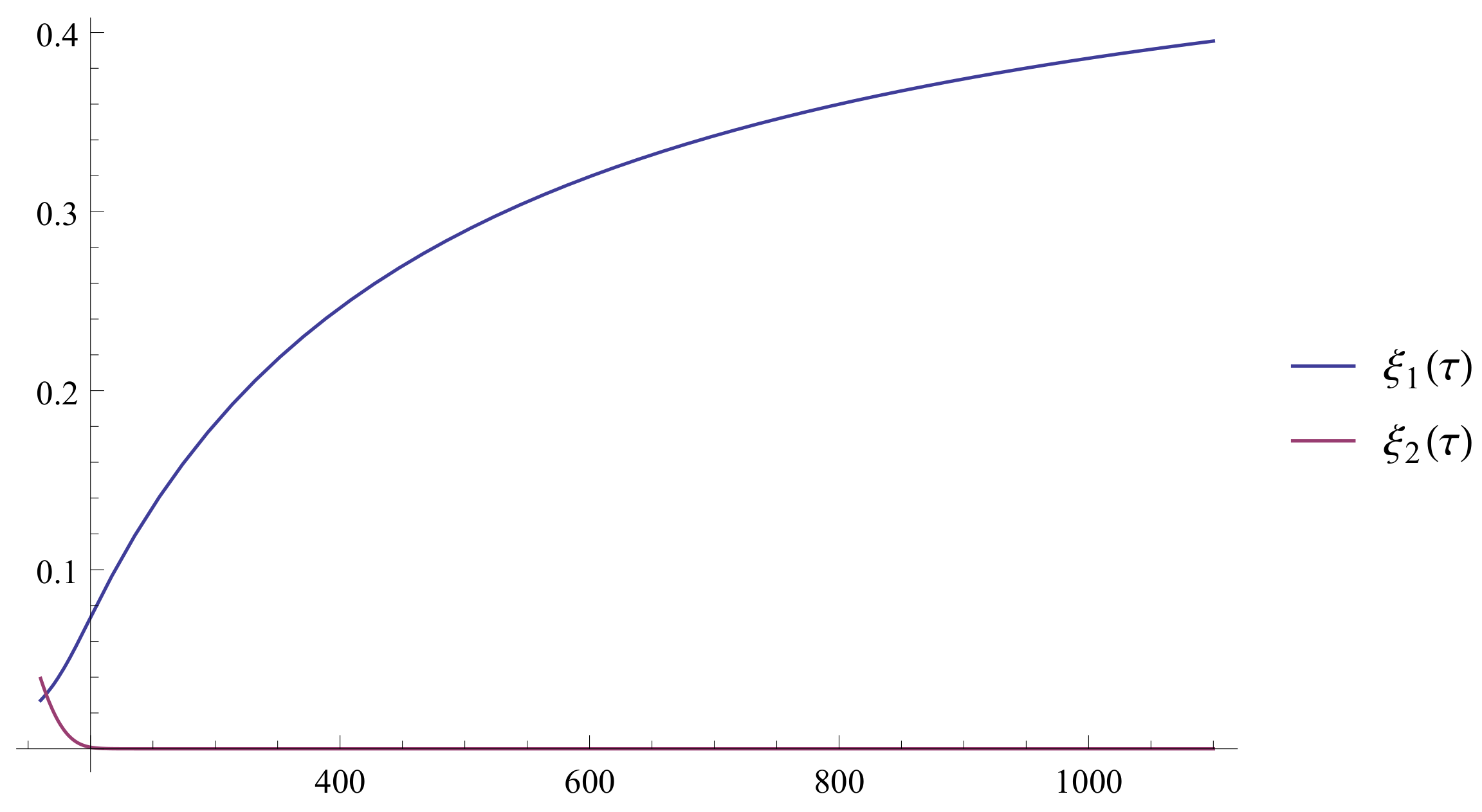
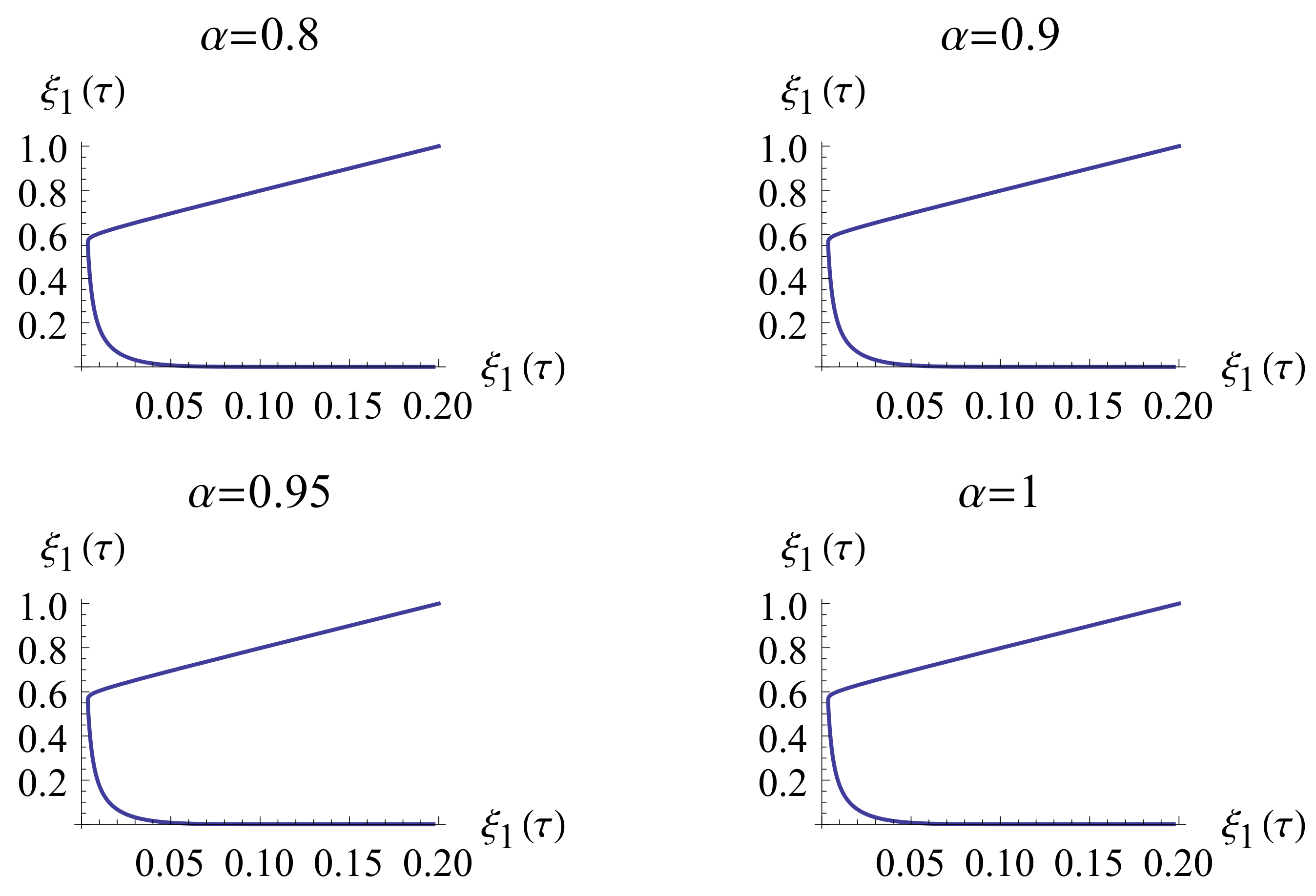
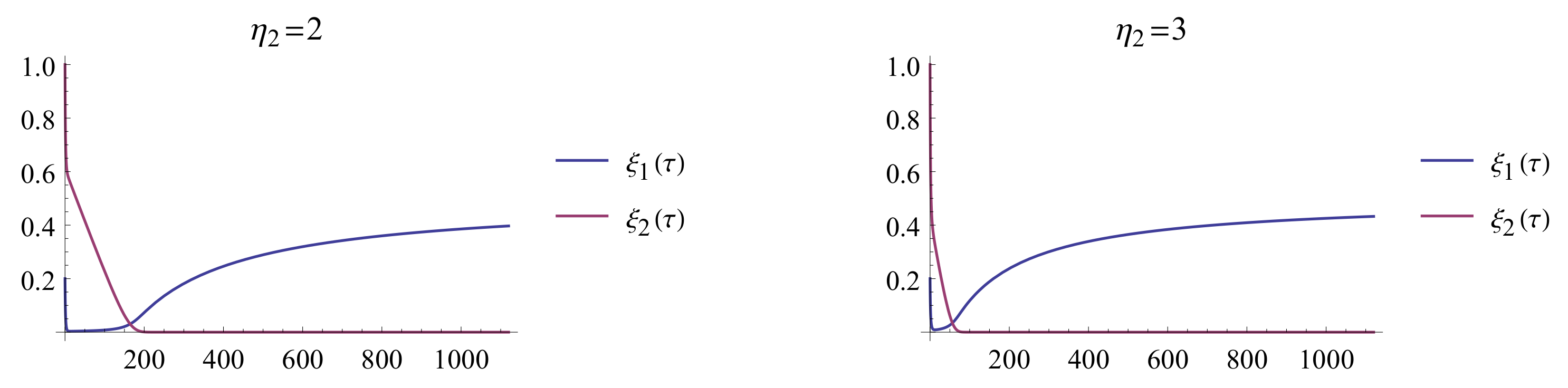
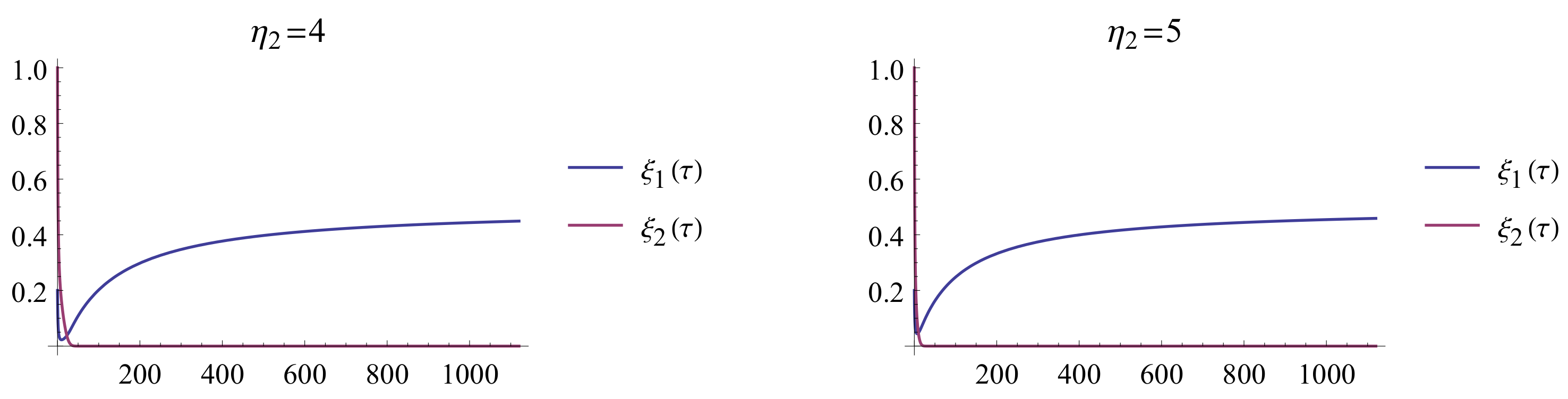
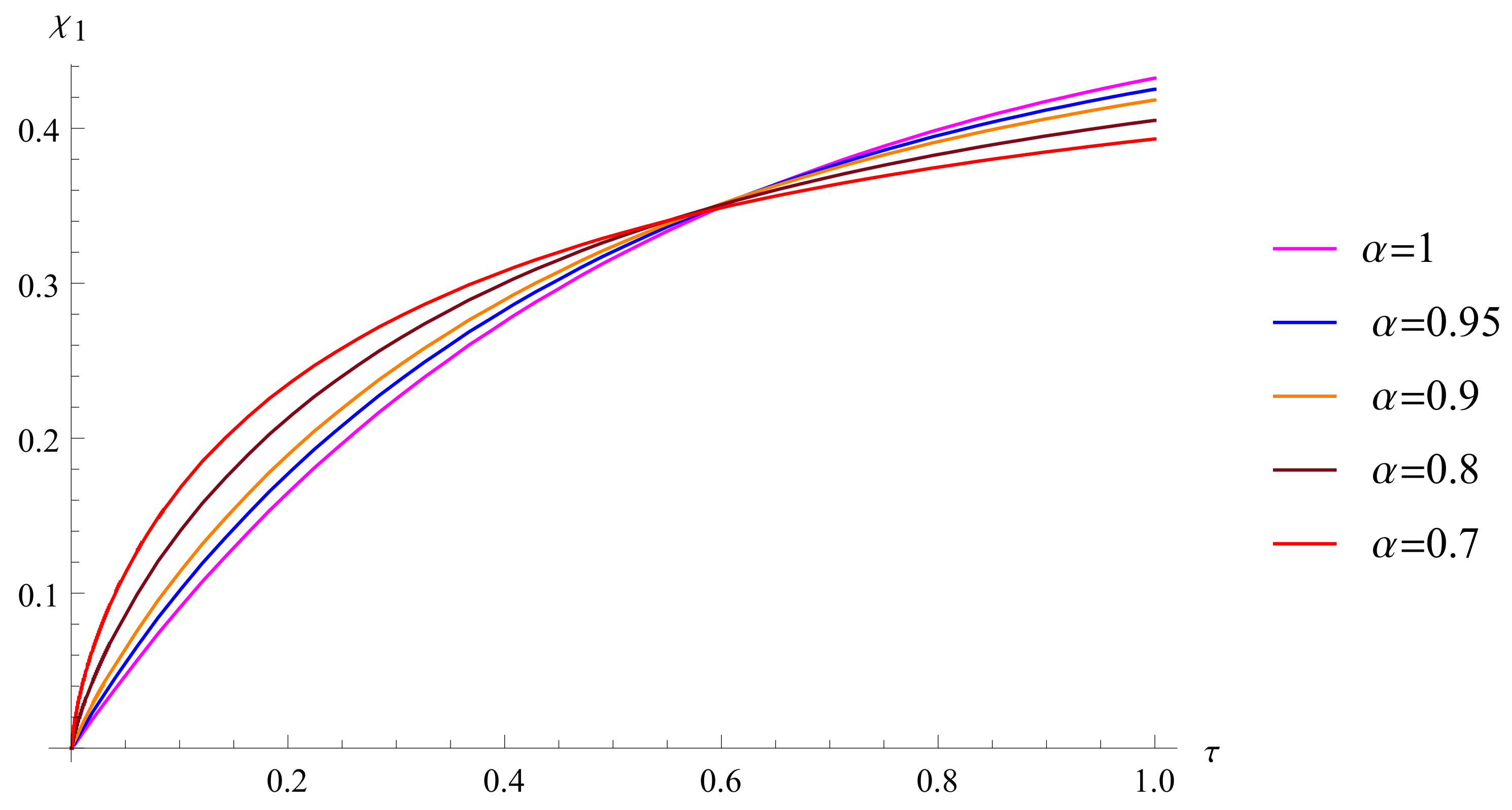
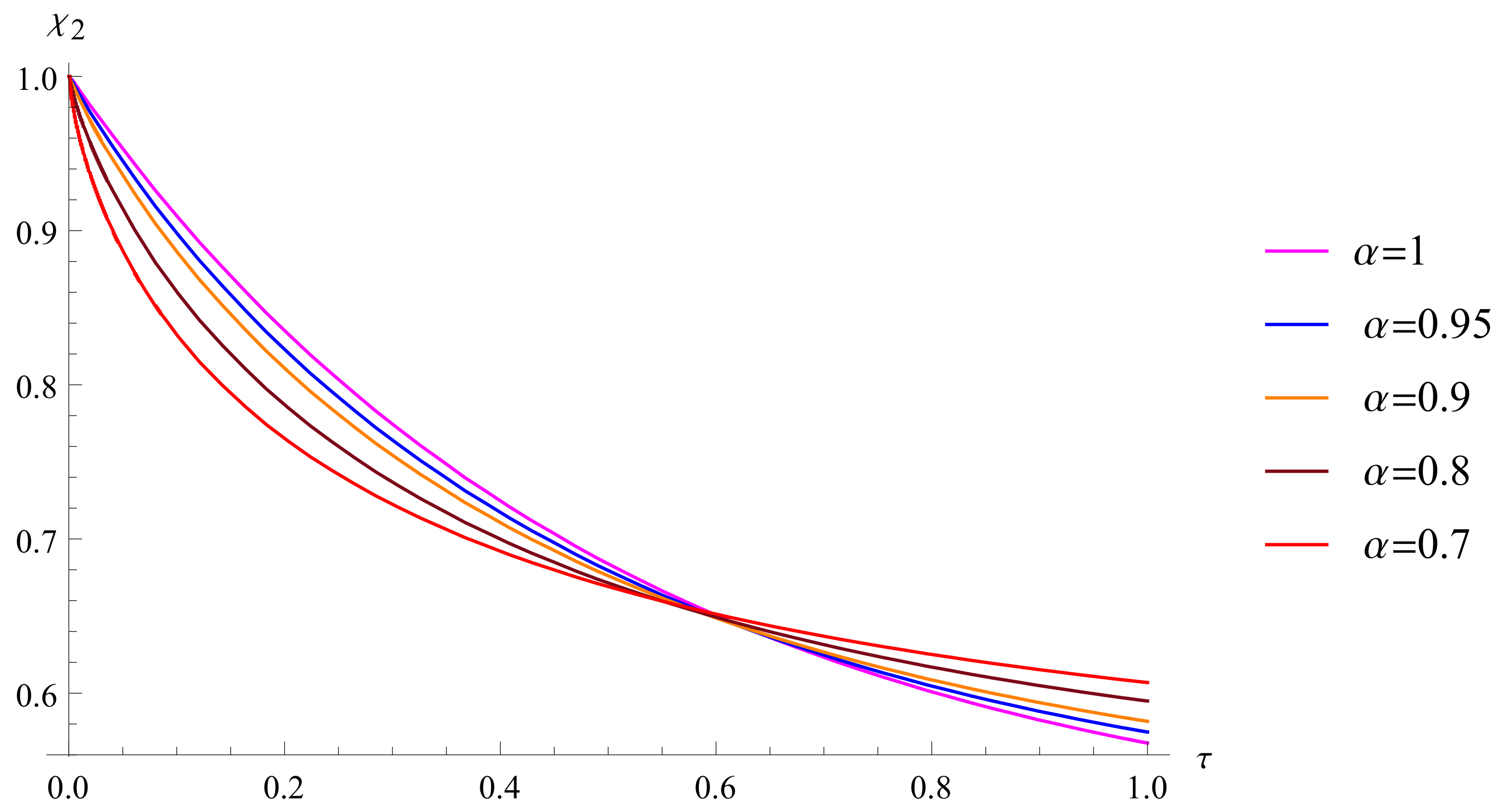
- Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7 reveal that the behavior of concentrations and differs based on the value of when . The domain can be divided into four parts: rapid decay of and in the first interval, linear increase in and linear decay of in the second region, fast increase in and fast decay of in the third region, and linear increase in and rapid decay of in the fourth region. This behavior is consistent with [23].
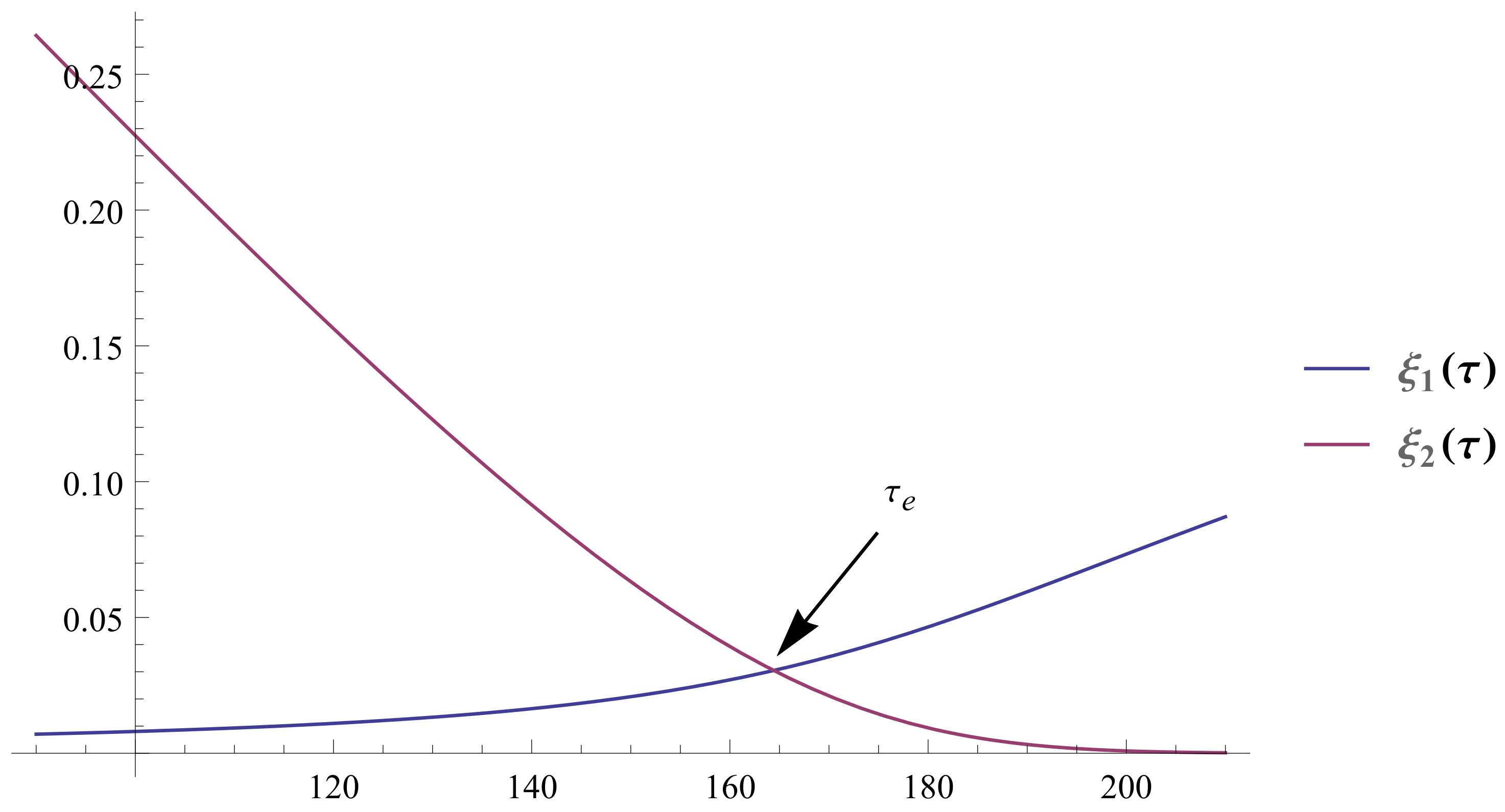
- Figure 5 visually indicates the end of the induction period .
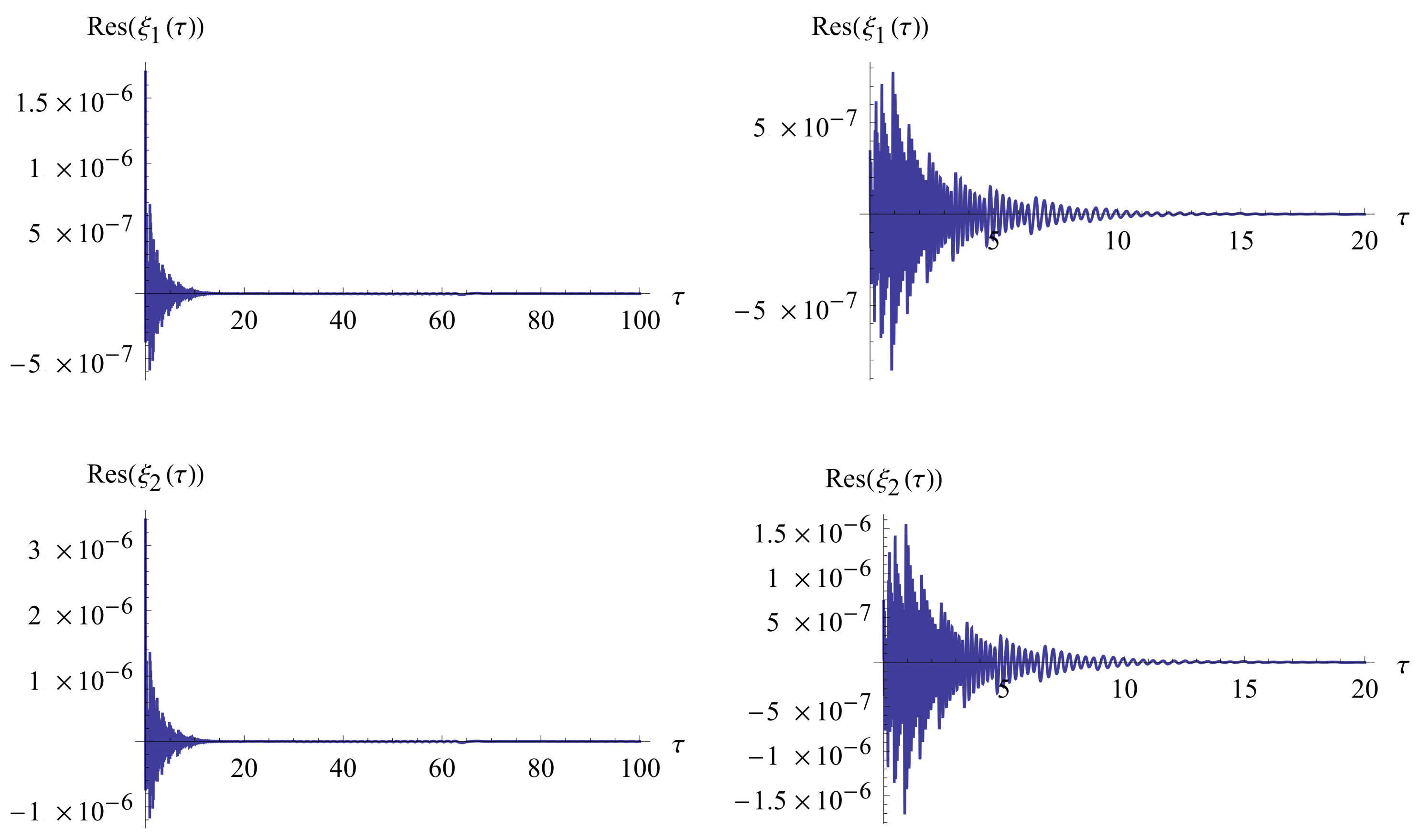
- Figure 8 shows that the residual errors of and are approximately , providing strong numerical evidence for the convergence of the proposed method.
- As approaches one, the approximate solutions converge to the solutions in [23].
- Table 3 presents the maximum error for different values of , which is approximately . This indicates that the approximate solution converges to the exact solution.
- Table 4 compares the computation time in our approach with those in [29,31] for the optimal control problem. It is evident that our approach requires significantly less computational time compared to [29,31]. This demonstrates that our approach converges faster to the exact solution, which is attributed to reducing our algebraic system to a set of algebraic systems.
- We can generalize our approach to boundary value problems using the linear shooting method. To do this, we assume initial conditions and , and then we determine these values by solving the system using the given boundary conditions.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Amin, R.; Ahmad, H.; Shah, K.; Bilal Hafeez, M.; Sumelka, W. Theoretical and computational analysis of nonlinear fractional integro-differential equations via collocation method. Chaos Solitons Fractals 2021, 151, 111252. [Google Scholar] [CrossRef]
- Biazar, J.; Sadri, K. Solution of weakly singular fractional integro-differential equations by using a new operational approach. J. Comput. Appl. Math. 2019, 352, 453–477. [Google Scholar] [CrossRef]
- Sahu, P.; Saha Ray, S. Legendre spectral collocation method for the solution of the model describing biological species living together. J. Comput. Appl. Math. 2016, 296, 47–55. [Google Scholar] [CrossRef]
- Roul, P.; Meyer, P. Numerical solutions of systems of nonlinear-differential equations by Homotopy-perturbation method. Appl. Math. Model. 2011, 35, 4234–4242. [Google Scholar] [CrossRef]
- Shakeri, F.; Dehghan, M. Solution of a model describing biological species living together using the variational iteration method. Math. Comput. Model. 2008, 48, 685–699. [Google Scholar] [CrossRef]
- Hatamzadeh-Varmazyar, S.; Masouri, Z.; Babolian, E. Numerical method for solving arbitrary linear differential equations using a set of orthogonal basis functions and operational matrix. Appl. Math. Model. 2016, 40, 233–253. [Google Scholar] [CrossRef]
- Odibat, Z.M. Analytic study on linear systems of fractional differential equations. Comput. Math. Appl. 2010, 59, 1171–1183. [Google Scholar] [CrossRef] [Green Version]
- Al-Refai, M. Fundamental results on systems of fractional differential equations in- volving Caputo-Fabrizio fractional derivative. Jordan J. Math. Stat. 2020, 13, 389–399. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Syam, S.M.; Siri, Z.; Altoum, S.H.; Kasmani, R.M. Analytical and Numerical Methods for Solving Second-Order Two-Dimensional Symmetric Sequential Fractional Integro-Differential Equations. Symmetry 2023, 15, 1263. [Google Scholar] [CrossRef]
- Katugampola, U.N. New approach to generalized fractional integral. Appl. Math. Comput. 2011, 218, 860–865. [Google Scholar] [CrossRef] [Green Version]
- Baleanu, D.; Jaiami, A.; Sajjadi, S.; Mozyrski, D. A new fractional model and optimal control of a tumor-immune surveillance with non-singular derivative operator. Chaos 2019, 29, 083127. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivative with non-local and non-singular kernel. Therm. Sci. 2016, 20, 757–763. [Google Scholar] [CrossRef] [Green Version]
- Da Vanterler, J.; Sousa, C.; Capelas de Oliveira, E. A Gronwall inequality and the Cauchy-type problem by means of Ψ-Hilfer operator. arXiv 2017, arXiv:1709.03634. [Google Scholar] [CrossRef] [Green Version]
- Youbi, F.; Momani, S.; Hasan, S.; Al-Smadi, M. Effective numerical technique for nonlinear Caputo-Fabrizio Systems of fractional Volterra Integro-differential equations in Hilbert space. Alex. Eng. J. 2022, 61, 1778–1786. [Google Scholar] [CrossRef]
- Zamanpour, I.; Ezzati, R. Operational matrix method for solving fractional weakly singular 2D partial Volterra integral equations. J. Comput. Appl. Math. 2023, 419, 114704. [Google Scholar] [CrossRef]
- Syam, M.I.; Sharadga, M.; Hashim, I. A numerical method for solving fractional delay differential equations based on the operational matrix method. Chaos Solitons Fractals 2021, 147, 110977. [Google Scholar] [CrossRef]
- Najafalizadeh, S.; Ezzati, R. A block pulse operational matrix method for solving two-dimensional nonlinear integro-differential equations of fractional order. J. Comput. Appl. Math. 2017, 326, 159–170. [Google Scholar] [CrossRef]
- Richards, W.T.; Loomis, A.L. The chemical effects of high frequency sound waves I. A preliminary survey. J. Am. Chem. Soc. 1927, 49, 3086–3100. [Google Scholar] [CrossRef]
- Forbes, G.S.; Estill, H.W.; Walker, O.J. Induction periods in reactions between thiosulfate and arsenite or arsenate: A useful clock reaction. J. Am. Chem. Soc. 1922, 44, 97–102. [Google Scholar] [CrossRef]
- Horváth, A.K.; Nagypál, I. Classification of clock reactions. ChemPhysChem 2015, 16, 588–594. [Google Scholar] [CrossRef] [PubMed]
- Kerr, R.; Thomson, W.M.; Smith, D.J. Mathematical modelling of the vitamin C clock reaction. R. Soc. Open Sci. 2019, 6, 181367. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wright, S.W. Tick tock, a vitamin C clock. J. Chem. Edu. 2002, 79, 40A. [Google Scholar] [CrossRef]
- Wright, S.W. The vitamin C clock reaction. J. Chem. Edu. 2002, 79, 41. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Mayne, D.Q.; Diehl, M. Model Predictive Control: Theory and Design, 2nd ed.; Nob Hill Publishing: Santa Barbara, CA, USA, 2017. [Google Scholar]
- Mehta, P.G. Principles of Control Systems Engineering; PHI Learning Pvt. Ltd: New Delhi, India, 2011. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Lotf, A.; Dehghan, M.; Yousef, S.A. A numerical technique for solving fractional optimal control problems. Comput. Math. Appl. 2011, 62, 1055–1067. [Google Scholar] [CrossRef] [Green Version]
- Agrawal, O.P.; Baleanu, D. A Hamiltonian Formulation and a Direct Numerical Scheme for Fractional Optimal Control Problems. J. Vib. Control 2007, 13, 1269–1281. [Google Scholar] [CrossRef]
- Keshavarz, E.; Ordokhani, Y.; Razzaghi, M. A numerical solution for fractional optimal control problems via Bernoulli polynomials. J. Vib. Control 2016, 22, 3889–3903. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.7 | 234.889 |
| 0.8 | 205.528 |
| 0.9 | 182.691 |
| 0.95 | 173.076 |
| 1 | 164.422 |
| 2 | 173.076 |
| 3 | 56.4086 |
| 4 | 22.6705 |
| 5 | 9.85377 |
| Error | |
|---|---|
| 1 | |
| 0.95 | |
| 0.8 | |
| 0.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Syam, S.M.; Siri, Z.; Altoum, S.H.; Kasmani, R.M. An Efficient Numerical Approach for Solving Systems of Fractional Problems and Their Applications in Science. Mathematics 2023, 11, 3132. https://doi.org/10.3390/math11143132
Syam SM, Siri Z, Altoum SH, Kasmani RM. An Efficient Numerical Approach for Solving Systems of Fractional Problems and Their Applications in Science. Mathematics. 2023; 11(14):3132. https://doi.org/10.3390/math11143132
Chicago/Turabian StyleSyam, Sondos M., Z. Siri, Sami H. Altoum, and R. Md. Kasmani. 2023. "An Efficient Numerical Approach for Solving Systems of Fractional Problems and Their Applications in Science" Mathematics 11, no. 14: 3132. https://doi.org/10.3390/math11143132