
Towards Higher-Order Zeroing Neural Networks for Calculating Quaternion Matrix Inverse with Application to Robotic Motion Tracking

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
1.1. The Higher-Order ZNN Design
1.2. The Noise-Handling Higher-Order ZNN Design
1.3. Problem Formulation and Key Contributions
- (1)
- For the first time, the TVQ-INV problem is addressed through the HZNN and NHZNN approaches;
- (2)
- With the purpose of addressing the TVQ-INV problem, three novel HZNN models and three novel NHZNN models are provided;
- (3)
- The models are subjected to a theoretical analysis that validates them;
- (4)
- Numerical simulations and applications under various types of noises are carried out to complement the theoretical concepts.
2. Higher Order and Noise-Handling ZNN Models in Solving the TVQ-INV
2.1. The HZNNQ Model
2.2. The NHZNNQ Model
2.3. The HZNNQC Model
2.4. The NHZNNQC Model
2.5. The HZNNQR Model
2.6. The NHZNNQR Model
3. Stability and Convergence Analysis
3.1. The HZNNQ, HZNNQC, and HZNNQR Models Theoretical Analysis
3.2. The NHZNNQ, NHZNNQC, and NHZNNQR Models Theoretical Analysis
4. Computational Simulations
- represents the constant noise;
- represents the linear noise;
- represents the bounded noise.
4.1. Simulation Examples
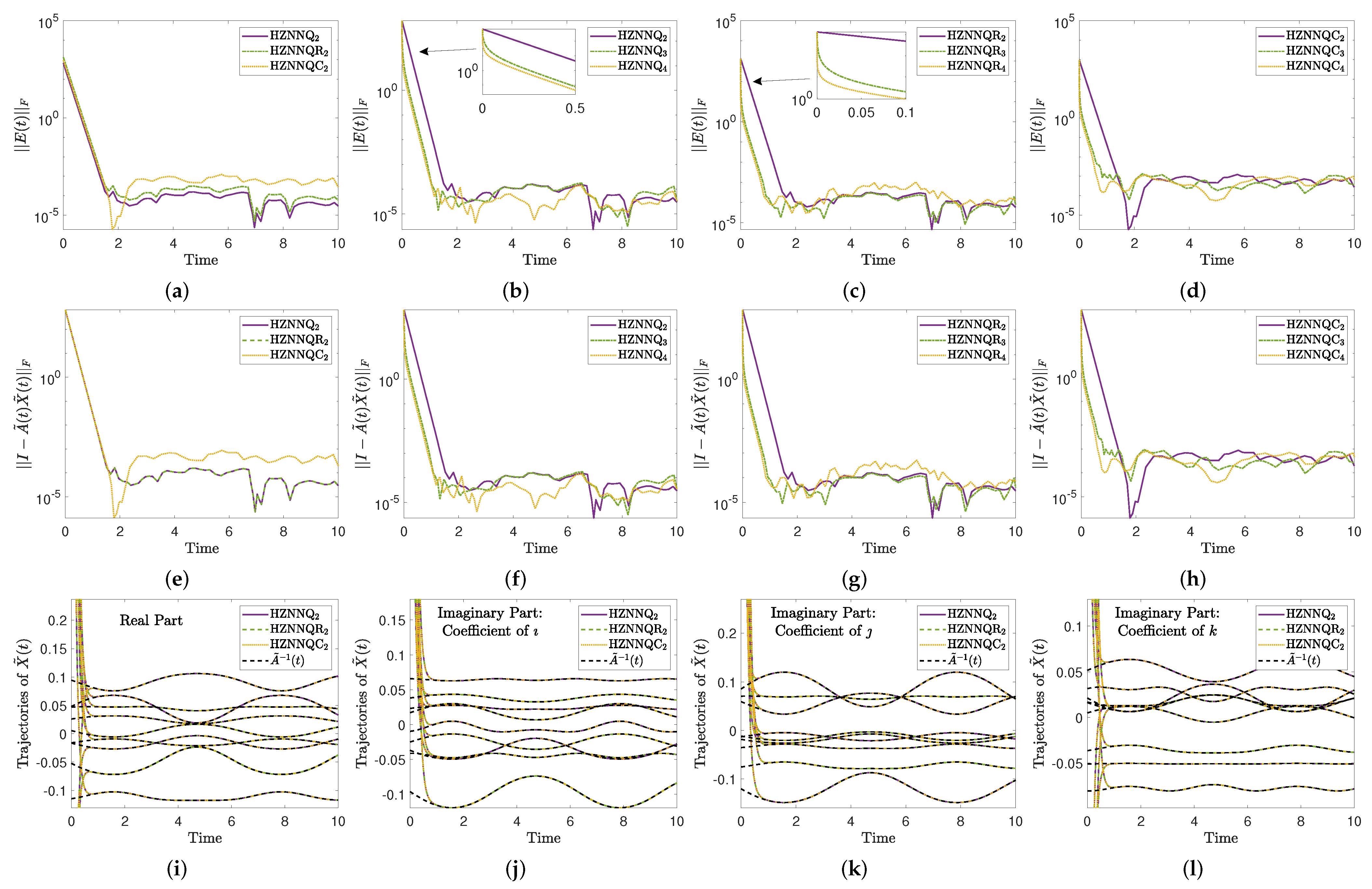
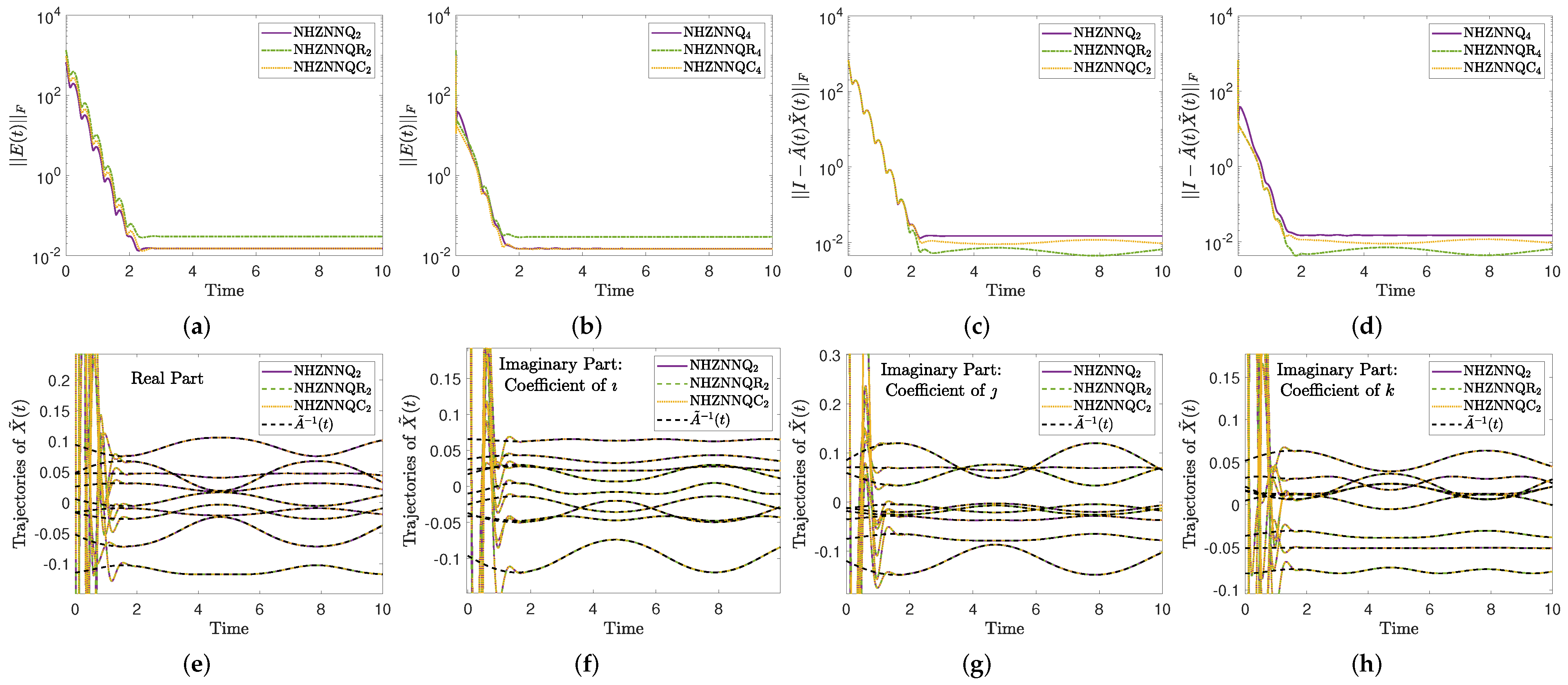
4.1.1. Example 1
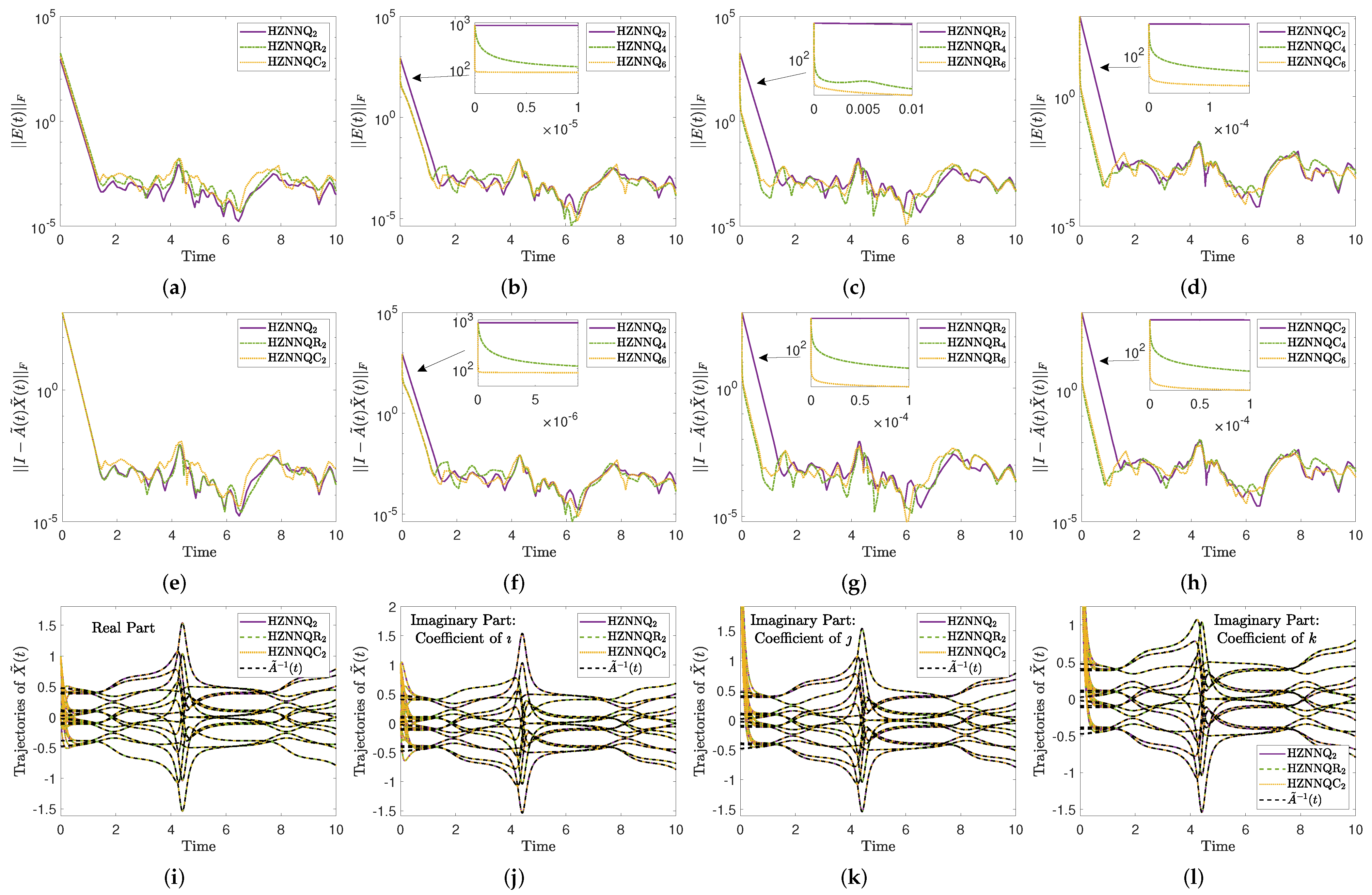
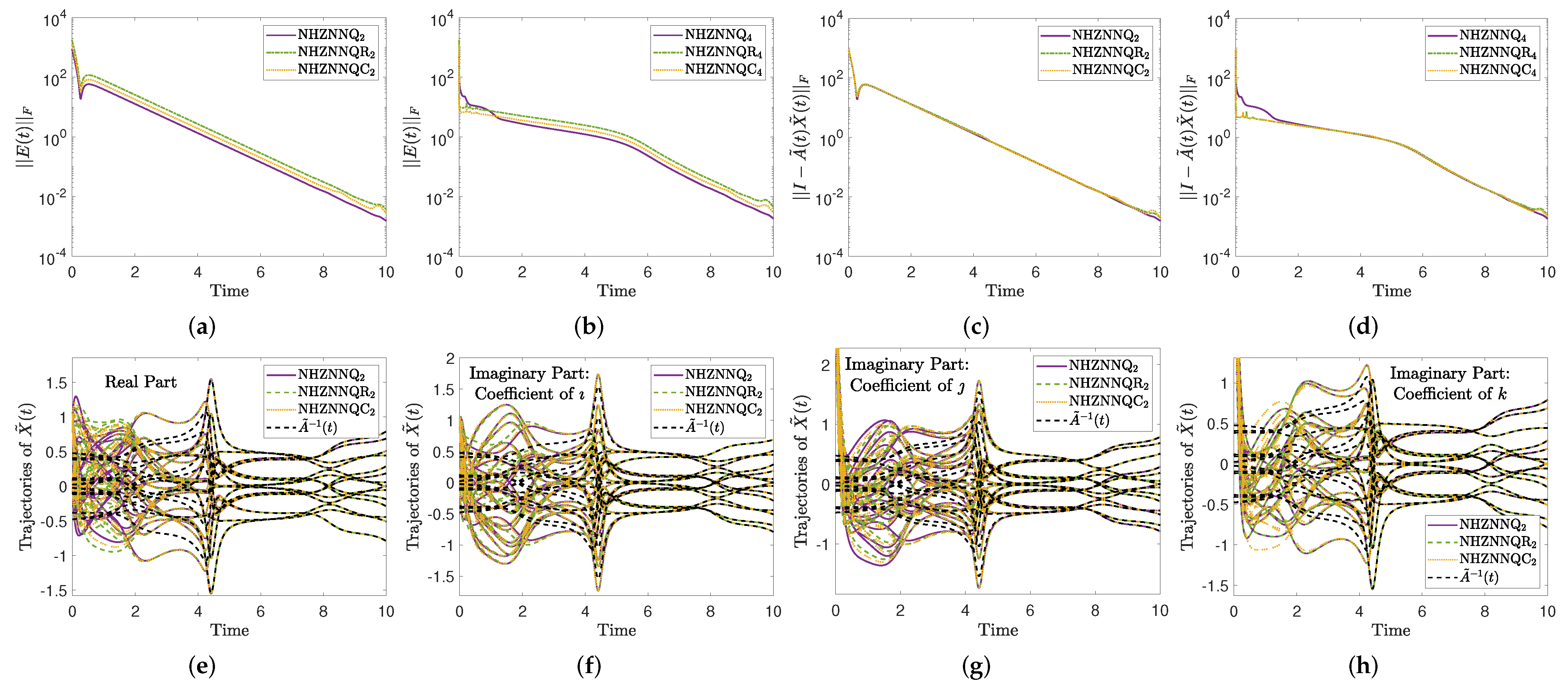
4.1.2. Example 2
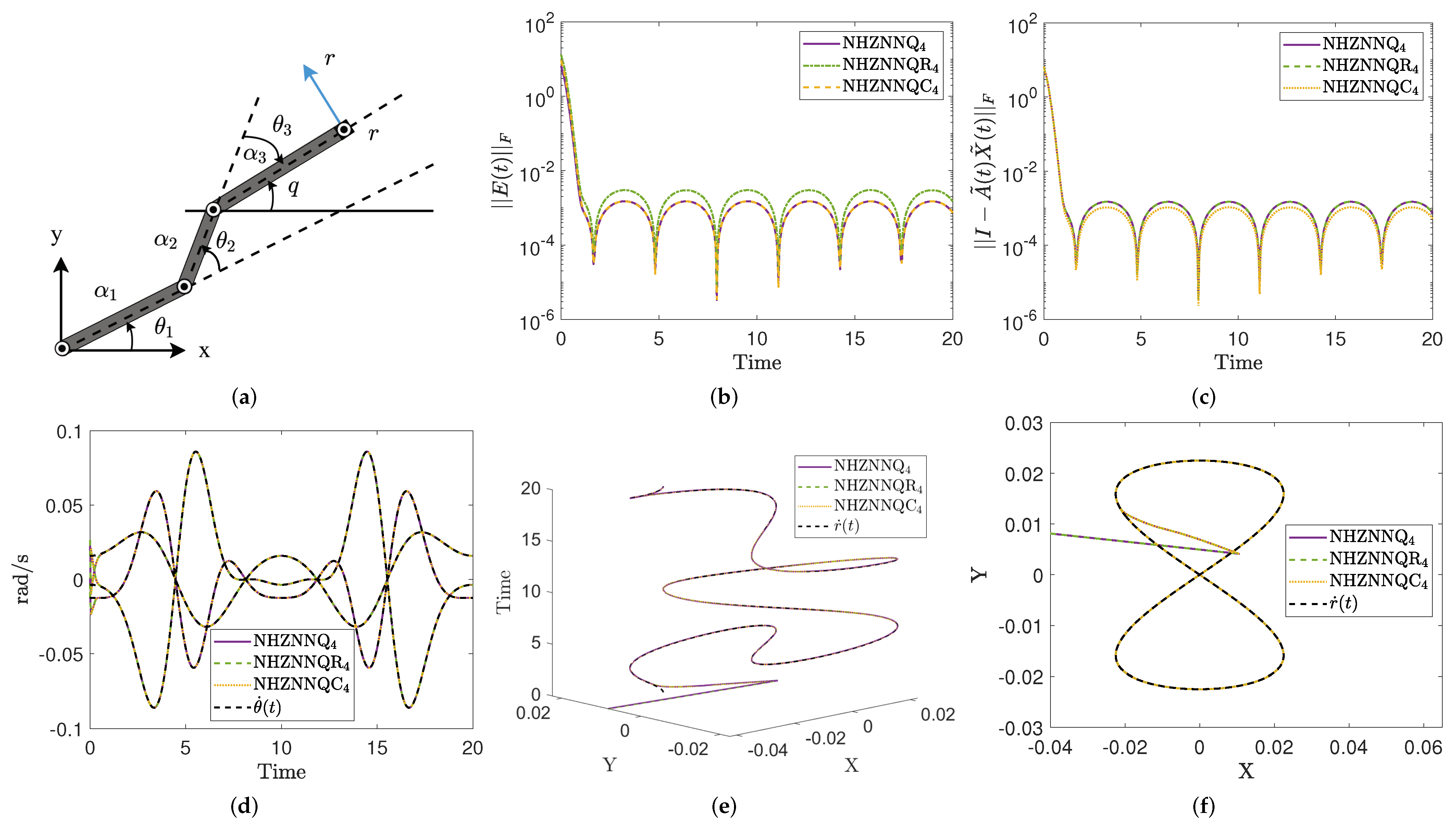
4.2. Application to Robotic Motion Tracking
4.3. Results and Discussion
5. Conclusions
- One may look at using nonlinear ZNNs for time-varying quaternion issues;
- It is possible to investigate using the finite-time ZNN framework to time-varying quaternion problems.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ben-Israel, A.; Greville, T.N.E. Generalized Inverses: Theory and Applications, 2nd ed.; CMS Books in Mathematics; Springer: New York, NY, USA, 2003. [Google Scholar] [CrossRef]
- Wang, G.; Wei, Y.; Qiao, S.; Lin, P.; Chen, Y. Generalized Inverses: Theory and Computations; Springer: Singapore, 2018; Volume 53. [Google Scholar]
- Zhang, S.; Dong, Y.; Ouyang, Y.; Yin, Z.; Peng, K. Adaptive neural control for robotic manipulators with output constraints and uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5554–5564. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Y.; Wang, Z.; Guo, L. Event-triggered strategy design for discrete-time nonlinear quadratic games with disturbance compensations: The noncooperative case. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1885–1896. [Google Scholar] [CrossRef]
- Mourtas, S.D.; Katsikis, V.N.; Kasimis, C. Feedback control systems stabilization using a bio-inspired neural network. EAI Endorsed Trans. AI Robots 2022, 1, 1–13. [Google Scholar] [CrossRef]
- Yang, X.; He, H. Self-learning robust optimal control for continuous-time nonlinear systems with mismatched disturbances. Neural Netw. 2018, 99, 19–30. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; He, J.; Li, Y.; Rafique, M.U. Distributed recurrent neural networks for cooperative control of manipulators: A game-theoretic perspective. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 415–426. [Google Scholar] [CrossRef] [PubMed]
- Mourtas, S.D. A weights direct determination neuronet for time-series with applications in the industrial indices of the federal reserve bank of St. Louis. J. Forecast. 2022, 14, 1512–1524. [Google Scholar] [CrossRef]
- Joldeş, M.; Muller, J.M. Algorithms for manipulating quaternions in floating-point arithmetic. In Proceedings of the 2020 IEEE 27th Symposium on Computer Arithmetic (ARITH), Portland, OR, USA, 7–10 June 2020; pp. 48–55. [Google Scholar]
- Szynal-Liana, A.; Włoch, I. Generalized commutative quaternions of the Fibonacci type. Boletín Soc. Mat. Mex. 2022, 28, 1. [Google Scholar] [CrossRef]
- Pavllo, D.; Feichtenhofer, C.; Auli, M.; Grangier, D. Modeling human motion with quaternion-based neural networks. Int. J. Comput. Vis. 2020, 128, 855–872. [Google Scholar] [CrossRef] [Green Version]
- Özgür, E.; Mezouar, Y. Kinematic modeling and control of a robot arm using unit dual quaternions. Robot. Auton. Syst. 2016, 77, 66–73. [Google Scholar] [CrossRef]
- Du, G.; Liang, Y.; Gao, B.; Otaibi, S.A.; Li, D. A cognitive joint angle compensation system based on self-feedback fuzzy neural network with incremental learning. IEEE Trans. Ind. Inform. 2021, 17, 2928–2937. [Google Scholar] [CrossRef]
- Goodyear, A.M.S.; Singla, P.; Spencer, D.B. Analytical state transition matrix for dual-quaternions for spacecraft pose estimation. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019; Univelt Inc.: Escondido, CA, USA, 2020; pp. 393–411. [Google Scholar]
- Giardino, S. Quaternionic quantum mechanics in real Hilbert space. J. Geom. Phys. 2020, 158, 103956. [Google Scholar] [CrossRef]
- Kansu, M.E. Quaternionic representation of electromagnetism for material media. Int. J. Geom. Methods Mod. Phys. 2019, 16, 1950105. [Google Scholar] [CrossRef]
- Weng, Z.H. Field equations in the complex quaternion spaces. Adv. Math. Phys. 2014, 2014, 450262. [Google Scholar] [CrossRef] [Green Version]
- Ghiloni, R.; Moretti, V.; Perotti, A. Continuous slice functional calculus in quaternionic Hilbert spaces. Rev. Math. Phys. 2013, 25, 1350006. [Google Scholar] [CrossRef]
- Kyrchei, I.I.; Mosić, D.; Stanimirović, P.S. MPCEP-*CEPMP-solutions of some restricted quaternion matrix equations. Adv. Appl. Clifford Algebr. 2022, 32, 22. [Google Scholar] [CrossRef]
- Huang, L.; Wang, Q.W.; Zhang, Y. The Moore-Penrose inverses of matrices over quaternion polynomial rings. Linear Algebra Its Appl. 2015, 475, 45–61. [Google Scholar] [CrossRef]
- Xiao, L.; Liu, S.; Wang, X.; He, Y.; Jia, L.; Xu, Y. Zeroing neural networks for dynamic quaternion-valued matrix inversion. IEEE Trans. Ind. Inform. 2022, 18, 1562–1571. [Google Scholar] [CrossRef]
- Xiao, L.; Huang, W.; Li, X.; Sun, F.; Liao, Q.; Jia, L.; Li, J.; Liu, S. ZNNs with a varying-parameter design formula for dynamic Sylvester quaternion matrix equation. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–11. [Google Scholar] [CrossRef]
- Xiao, L.; Cao, P.; Song, W.; Luo, L.; Tang, W. A fixed-time noise-tolerance ZNN model for time-variant inequality-constrained quaternion matrix least-squares problem. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–10. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y.; Huang, W.; Jia, L.; Gao, X. A dynamic parameter noise-tolerant zeroing neural network for time-varying quaternion matrix equation with applications. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–10. [Google Scholar] [CrossRef]
- Tan, N.; Yu, P.; Ni, F. New varying-parameter recursive neural networks for model-free kinematic control of redundant manipulators with limited measurements. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Dachang, Z.; Aodong, C.; Baolin, D.; Puchen, Z. Dual-mode synchronization predictive control of robotic manipulator. J. Dyn. Syst. Meas. Control 2022, 144, 111002. [Google Scholar] [CrossRef]
- Jerbi, H.; Al-Darraji, I.; Tsaramirsis, G.; Ladhar, L.; Omri, M. Hamilton-Jacobi inequality adaptive robust learning tracking controller of wearable robotic knee system. Mathematics 2023, 11, 1351. [Google Scholar] [CrossRef]
- Zhang, Y.; Ge, S.S. Design and analysis of a general recurrent neural network model for time-varying matrix inversion. IEEE Trans. Neural Netw. 2005, 16, 1477–1490. [Google Scholar] [CrossRef] [Green Version]
- Chai, Y.; Li, H.; Qiao, D.; Qin, S.; Feng, J. A neural network for Moore-Penrose inverse of time-varying complex-valued matrices. Int. J. Comput. Intell. Syst. 2020, 13, 663–671. [Google Scholar] [CrossRef]
- Sun, Z.; Li, F.; Jin, L.; Shi, T.; Liu, K. Noise-tolerant neural algorithm for online solving time-varying full-rank matrix Moore-Penrose inverse problems: A control-theoretic approach. Neurocomputing 2020, 413, 158–172. [Google Scholar] [CrossRef]
- Wu, W.; Zheng, B. Improved recurrent neural networks for solving Moore-Penrose inverse of real-time full-rank matrix. Neurocomputing 2020, 418, 221–231. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Tan, N.; Cai, B. Zhang neural network solving for time-varying full-rank matrix Moore-Penrose inverse. Computing 2011, 92, 97–121. [Google Scholar] [CrossRef]
- Qiao, S.; Wang, X.Z.; Wei, Y. Two finite-time convergent Zhang neural network models for time-varying complex matrix Drazin inverse. Linear Algebra Its Appl. 2018, 542, 101–117. [Google Scholar] [CrossRef]
- Qiao, S.; Wei, Y.; Zhang, X. Computing time-varying ML-weighted pseudoinverse by the Zhang neural networks. Numer. Funct. Anal. Optim. 2020, 41, 1672–1693. [Google Scholar] [CrossRef]
- Wang, X.; Stanimirovic, P.S.; Wei, Y. Complex ZFs for computing time-varying complex outer inverses. Neurocomputing 2018, 275, 983–1001. [Google Scholar] [CrossRef]
- Simos, T.E.; Katsikis, V.N.; Mourtas, S.D.; Stanimirović, P.S.; Gerontitis, D. A higher-order zeroing neural network for pseudoinversion of an arbitrary time-varying matrix with applications to mobile object localization. Inf. Sci. 2022, 600, 226–238. [Google Scholar] [CrossRef]
- Zhou, M.; Chen, J.; Stanimirovic, P.S.; Katsikis, V.N.; Ma, H. Complex varying-parameter Zhang neural networks for computing core and core-EP inverse. Neural Process. Lett. 2020, 51, 1299–1329. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Fedorov, R.V.; Generalov, D.A.; Chukalin, A.V.; Katsikis, V.N.; Mourtas, S.D.; Simos, T.E. Portfolio insurance through error-correction neural networks. Mathematics 2022, 10, 3335. [Google Scholar] [CrossRef]
- Mourtas, S.D.; Katsikis, V.N. Exploiting the Black-Litterman framework through error-correction neural networks. Neurocomputing 2022, 498, 43–58. [Google Scholar] [CrossRef]
- Mourtas, S.D.; Kasimis, C. Exploiting mean-variance portfolio optimization problems through zeroing neural networks. Mathematics 2022, 10, 3079. [Google Scholar] [CrossRef]
- Jiang, W.; Lin, C.L.; Katsikis, V.N.; Mourtas, S.D.; Stanimirović, P.S.; Simos, T.E. Zeroing neural network approaches based on direct and indirect methods for solving the Yang–Baxter-like matrix equation. Mathematics 2022, 10, 1950. [Google Scholar] [CrossRef]
- Katsikis, V.N.; Mourtas, S.D.; Stanimirović, P.S.; Zhang, Y. Continuous-time varying complex QR decomposition via zeroing neural dynamics. Neural Process. Lett. 2021, 53, 3573–3590. [Google Scholar] [CrossRef]
- Stanimirović, P.S.; Katsikis, V.N.; Li, S. Higher-order ZNN dynamics. Neural Process. Lett. 2019, 51, 697–721. [Google Scholar] [CrossRef]
- Kornilova, M.; Kovalnogov, V.; Fedorov, R.; Zamaleev, M.; Katsikis, V.N.; Mourtas, S.D.; Simos, T.E. Zeroing neural network for pseudoinversion of an arbitrary time-varying matrix based on singular value decomposition. Mathematics 2022, 10, 1208. [Google Scholar] [CrossRef]
- Dai, J.; Tan, P.; Yang, X.; Xiao, L.; Jia, L.; He, Y. A fuzzy adaptive zeroing neural network with superior finite-time convergence for solving time-variant linear matrix equations. Knowl.-Based Syst. 2022, 242, 108405. [Google Scholar] [CrossRef]
- Xiao, L.; Tan, H.; Dai, J.; Jia, L.; Tang, W. High-order error function designs to compute time-varying linear matrix equations. Inf. Sci. 2021, 576, 173–186. [Google Scholar] [CrossRef]
- Zhong, N.; Huang, Q.; Yang, S.; Ouyang, F.; Zhang, Z. A varying-parameter recurrent neural network combined with penalty function for solving constrained multi-criteria optimization scheme for redundant robot manipulators. IEEE Access 2021, 9, 50810–50818. [Google Scholar] [CrossRef]
- Climent, J.; Thome, N.; Wei, Y. A geometrical approach on generalized inverses by Neumann-type series. Linear Algebra Appl. 2001, 332–334, 533–540. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Li, Z. A family of iterative methods for computing the approximate inverse of a square matrix and inner inverse of a non-square matrix. Appl. Math. Comput. 2010, 215, 3433–3442. [Google Scholar] [CrossRef]
- Liu, X.; Jin, H.; Yu, Y. Higher-order convergent iterative method for computing the generalized inverse and its application to Toeplitz matrices. Linear Algebra Appl. 2013, 439, 1635–1650. [Google Scholar] [CrossRef]
- Weiguo, L.; Juan, L.; Tiantian, Q. A family of iterative methods for computing Moore-Penrose inverse of a matrix. Linear Algebra Appl. 2013, 438, 47–56. [Google Scholar] [CrossRef]
- Stanimirović, P.S.; Srivastava, S.; Gupta, D.K. From Zhang Neural Network to scaled hyperpower iterations. J. Comput. Appl. Math. 2018, 331, 133–155. [Google Scholar] [CrossRef]
- Katsikis, V.N.; Stanimirović, P.S.; Mourtas, S.D.; Li, S.; Cao, X. Chapter Towards higher order dynamical systems. In Generalized Inverses: Algorithms and Applications; Mathematics Research Developments; Nova Science Publishers, Inc.: New York, NY, USA, 2021; pp. 207–239. [Google Scholar]
- Jin, L.; Zhang, Y.; Li, S. Integration-Enhanced Zhang Neural Network for Real-Time-Varying Matrix Inversion in the Presence of Various Kinds of Noises. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 2615–2627. [Google Scholar] [CrossRef]
- Farebrother, R.W.; Groß, J.; Troschke, S.O. Matrix representation of quaternions. Linear Algebra Its Appl. 2003, 362, 251–255. [Google Scholar] [CrossRef] [Green Version]
- Simos, T.E.; Katsikis, V.N.; Mourtas, S.D.; Stanimirović, P.S. Finite-time convergent zeroing neural network for solving time-varying algebraic Riccati equations. J. Frankl. Inst. 2022, 359, 10867–10883. [Google Scholar] [CrossRef]
- Liu, H.; Wang, T.; Guo, D. Design and validation of zeroing neural network to solve time-varying algebraic Riccati equation. IEEE Access 2020, 8, 211315–211323. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, L. Robot Manipulator Redundancy Resolution; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | SE of Section 4.1.1 | SE of Section 4.1.2 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| HZNNQ | 2 | 663.7 | 663.7 | 657.3 | 244.2 | 2 | 876.2 | 876.2 | 867.5 | 322.8 |
| 3 | 663.7 | 661.8 | 288.1 | 6.6 | 4 | 876.2 | 236.3 | 79.1 | 22.1 | |
| 4 | 663.7 | 461.7 | 78.6 | 3.1 | 6 | 876.2 | 83.5 | 68.4 | 20.1 | |
| HZNNQC | 2 | 1327.4 | 1327.4 | 1314.5 | 488.5 | 2 | 1752.5 | 1752.5 | 1735.1 | 645.1 |
| 3 | 1327.4 | 1321.5 | 212.3 | 1.9 | 4 | 1752.5 | 439.2 | 16.8 | 1.7 | |
| 4 | 1327.4 | 512.4 | 23.4 | 0.9 | 6 | 1752.5 | 26.7 | 8.6 | 1.5 | |
| HZNNQR | 2 | 938.6 | 938.6 | 929.5 | 345.1 | 2 | 1239.2 | 1239.2 | 1227.1 | 455.6 |
| 3 | 938.6 | 934.5 | 150.2 | 1.3 | 4 | 1239.2 | 310.7 | 11.8 | 1.2 | |
| 4 | 938.6 | 362.7 | 16.5 | 0.6 | 6 | 1239.2 | 18.8 | 6.1 | 1.1 | |
| NHZNNQ | 2 | 663.7 | 663.7 | 657.9 | 199.9 | 2 | 876.2 | 876.2 | 867.6 | 304.2 |
| 4 | 663.7 | 461.6 | 76.9 | 34.9 | 4 | 876.2 | 236.3 | 79.1 | 24.5 | |
| NHZNNQR | 2 | 1327.4 | 1327.4 | 1315.8 | 400.7 | 2 | 1752.5 | 1752.5 | 1735.2 | 610.1 |
| 4 | 1327.4 | 512.5 | 21.3 | 18.5 | 4 | 1752.5 | 439.2 | 16.3 | 9.3 | |
| NHZNNQR | 2 | 938.6 | 938.6 | 930.4 | 285.4 | 2 | 1239.2 | 1239.2 | 1227.1 | 432.8 |
| 4 | 938.6 | 362.3 | 15.1 | 13.1 | 4 | 1239.2 | 310.8 | 11.5 | 6.6 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbassi, R.; Jerbi, H.; Kchaou, M.; Simos, T.E.; Mourtas, S.D.; Katsikis, V.N. Towards Higher-Order Zeroing Neural Networks for Calculating Quaternion Matrix Inverse with Application to Robotic Motion Tracking. Mathematics 2023, 11, 2756. https://doi.org/10.3390/math11122756
Abbassi R, Jerbi H, Kchaou M, Simos TE, Mourtas SD, Katsikis VN. Towards Higher-Order Zeroing Neural Networks for Calculating Quaternion Matrix Inverse with Application to Robotic Motion Tracking. Mathematics. 2023; 11(12):2756. https://doi.org/10.3390/math11122756
Chicago/Turabian StyleAbbassi, Rabeh, Houssem Jerbi, Mourad Kchaou, Theodore E. Simos, Spyridon D. Mourtas, and Vasilios N. Katsikis. 2023. "Towards Higher-Order Zeroing Neural Networks for Calculating Quaternion Matrix Inverse with Application to Robotic Motion Tracking" Mathematics 11, no. 12: 2756. https://doi.org/10.3390/math11122756