
Exponential Stability of a Class of Neutral Inertial Neural Networks with Multi-Proportional Delays and Leakage Delays

{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Main Results
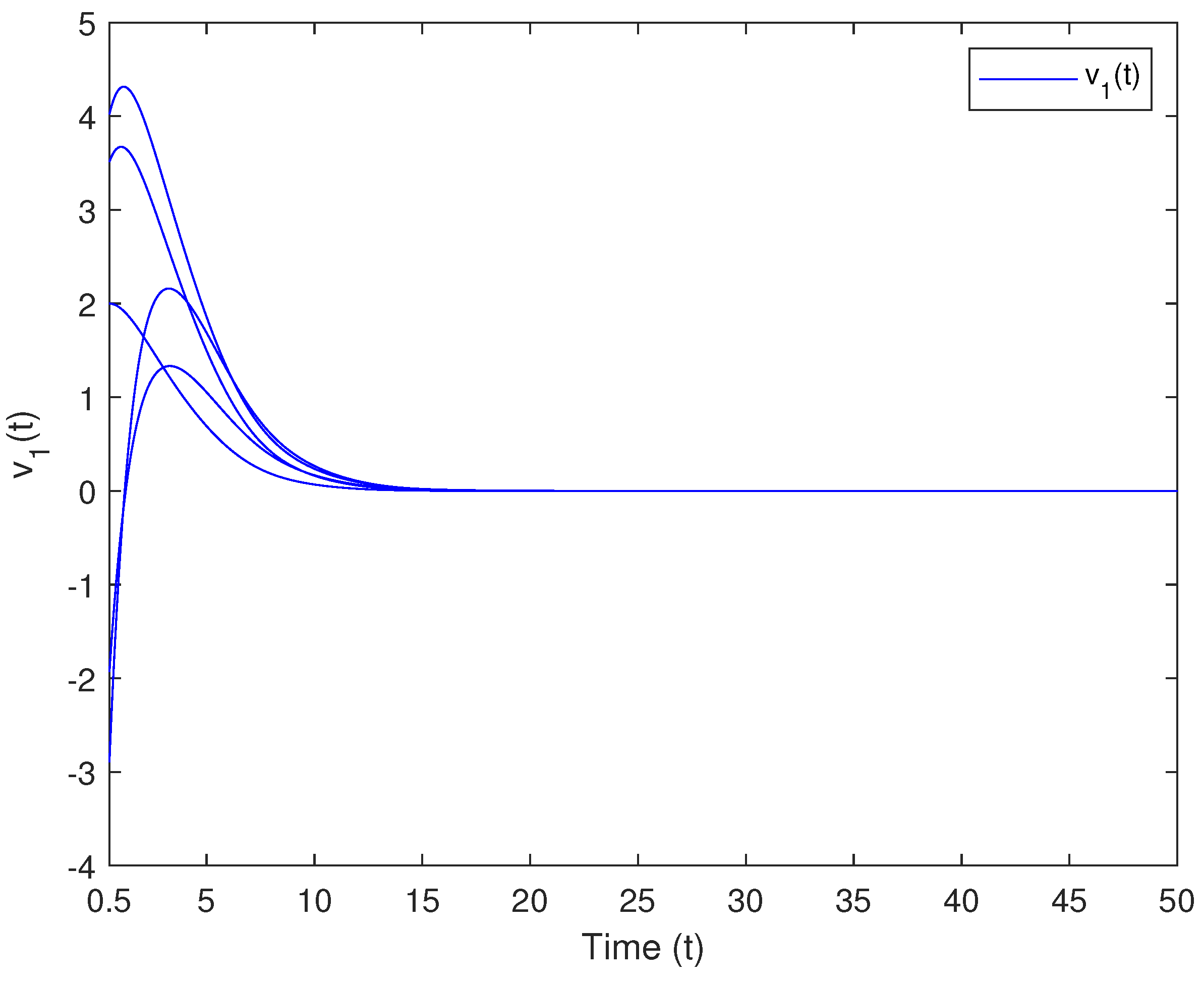
4. Simulation Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Carpetern, G.A. Neural network models for patten recognition and associative memory. Neural Netw. 1989, 2, 243–257. [Google Scholar]
- Cohen, M.; Grossberg, S. Absolute stability of global pattern formation and parallel memory storage by competive neural networks. IEEE Trans. Syst. Man Cybern. Syst. 1983, 13, 815–826. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, N.; Chen, J. A survey of recent advances on stability analysis, state estimation and synchronization control for neural networks. Neurocomputing 2023, 515, 26–36. [Google Scholar] [CrossRef]
- Babcock, K.; Westervelt, R. Dynamics of simple electronic neural networks. Phys. D 1987, 28, 305–316. [Google Scholar] [CrossRef]
- Angelaki, D.E.; Correia, M.J. Models of membrane resonance in pigeon semicircular canal type II hair cells. Biol. Cybern. 1991, 65, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Wheeler, D.W.; Schieve, W.C. Stability and chaos in an inertial two-neuron system. Phys. D 1997, 105, 267–284. [Google Scholar] [CrossRef]
- Duan, L.; Li, J. Fixed-time synchronization of fuzzy neutral-type BAM memristive inertial neural networks with proportional delays. Inf. Sci. 2021, 576, 522–541. [Google Scholar] [CrossRef]
- Kong, F.; Zhu, Q.; Huang, T. Fixed-Time stability for discontinuous uncertain inertial neural networks with time-varying delays. IEEE Trans. Syst. Man Cybern. 2022, 52, 4507–4517. [Google Scholar] [CrossRef]
- Zhou, L.; Zhu, Q.; Huang, T. Global polynomial synchronization of proportional delayed inertial neural networks. IEEE Trans. Syst. Man Cybern. 2023, in press. [CrossRef]
- Wang, J.; Zhang, X.; Wang, X.; Yang, X. L2 − L∞ state estimation of the high-order inertial neural network with time-varying delay: Non-reduced order strategy. Inf. Sci. 2022, 607, 62–78. [Google Scholar] [CrossRef]
- Zhang, G.; Zeng, Z. Stabilization of second-order memristive neural networks with mixed time delays via nonreduced order. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 700–706. [Google Scholar] [CrossRef] [PubMed]
- Cui, N.; Jiang, H.; Hu, C.; Abdurahman, A. Global asymptotic and robust stability of inertial neural networks with proportional delays. Neurocomputing 2018, 272, 326–333. [Google Scholar] [CrossRef]
- Li, Q.; Zhou, L. Global polynomial stabilization of proportional delayed inertial memristive neural networks. Inf. Sci. 2023, 623, 729–747. [Google Scholar] [CrossRef]
- Long, C.; Zhang, G.; Zeng, Z.; Hu, J. Finite-time stabilization of complex-valued neural networks with proportional delays and inertial terms: A non-separation approach. Neural Netw. 2022, 148, 86–95. [Google Scholar] [CrossRef]
- Kong, F.; Ren, Y.; Sakthivel, R. New criteria on periodicity and stabilization of discontinuous uncertain inertial Cohen-Grossberg neural networks with proportional delays. Chaos Solitons Fractals 2021, 150, 1–12. [Google Scholar] [CrossRef]
- Aouiti, C.; Sakthivel, R.; Touati, F. Global dissipativity of fuzzy cellular neural networks with inertial term and proportional delays. Int. J. Syst. Sci. 2020, 51, 1392–1405. [Google Scholar] [CrossRef]
- Guo, R.; Xu, S.; Guo, J. Sliding-mode synchronization control of complex-valued inertial neural networks with leakage delay and time-varying delays. IEEE Trans. Syst. Man Cybern. 2023, 53, 1095–1103. [Google Scholar]
- Hale, J.K.; Lunel, S.M.V. Introduction to Function Differential Equation; Springer: Berlin, Germany, 1991. [Google Scholar]
- Li, X. Global robust stability for stochastic interval neural networks with continuously distributed delays of neutral type. Appl. Math. Comput. 2010, 215, 4370–4384. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, Q. Stabilization of stochastic highly nonlinear delay systems with neutral-term. IEEE Trans. Autom. Control 2023, 68, 2544–2551. [Google Scholar] [CrossRef]
- Lakshmanana, S.; Lima, C.P.; Prakashb, M.; Nahavandia, S.; Balasubramaniamc, P. Neutral-type of delayed inertial neural networks and their stability analysis using the LMI approach. Neurocomputing 2017, 230, 243–250. [Google Scholar] [CrossRef]
- Duan, L.; Duan, J. Global lagrange stability of inertial neutral type neural networks with mixed time-varying delays. Neural Process Lett. 2020, 51, 1849–1867. [Google Scholar] [CrossRef]
- Tu, Z.; Cao, J.; Alsaedi, A.; Alsaadi, F. Global dissipativity of memristor-based neutral type inertial neural networks. Neural Netw. 2017, 88, 125–133. [Google Scholar] [CrossRef] [PubMed]
- Wu, K.; Jian, J. Non-reduced order strategies for global dissipativity of memristive neutral-type inertial neural networks with mixed time-varying delays. Neurocomputing 2021, 436, 174–183. [Google Scholar] [CrossRef]
- Aouiti, C.; Hui, Q.; Jallouli, H.; Moulay, E. Fixed-time stabilization of fuzzy neutral-type inertial neural networks with time-varying delay. Fuzzy Sets Syst. 2011, 411, 48–67. [Google Scholar] [CrossRef]
- Duan, L.; Li, J. Global exponential bipartite synchronization for neutral memristive inertial coupling mixed time-varying delays neural networks with antagonistic interactions. Commun. Nonlinear Sci. Numer. Simul. 2023, 119, 107071. [Google Scholar] [CrossRef]
- Yu, Y. Global exponential convergence for a class of HCNNs with neutral time-proportional delays. Appl. Math. Comput. 2016, 285, 1–7. [Google Scholar] [CrossRef]
- Xu, C.; Li, P. Global exponential convergence of neutral-type Hopfield neural networks with multi-proportional delays and leakage delays. Chaos Solitons Fractals 2017, 96, 139–144. [Google Scholar] [CrossRef]
- Yang, G.; Wang, W. New results on convergence of CNNs with neutral type proportional delays and D operator. Neural Process Lett. 2019, 49, 321–330. [Google Scholar] [CrossRef]
- Huang, C.; Su, R.; Cao, J.; Xiao, S. Asymptotically stable high-order neutral cellular neural networks with proportional delays and D operators. Math. Comput. Simul. 2020, 171, 127–135. [Google Scholar] [CrossRef]
- Deng, Y.; Huang, C.; Cao, J. New results on dynamics of neutral type HCNNs with proportional delays. Math. Comput. Simul. 2021, 187, 51–59. [Google Scholar] [CrossRef]
- Song, Q.; Yang, L.; Liu, Y.; Alsaadi, F.E. Stability of quaternion-valued neutral-type neural networks with leakage delay and proportional delays. Neurocomputing 2021, 521, 191–198. [Google Scholar] [CrossRef]
- Jian, J.; Duan, L. Finite-time synchronization for fuzzy neutral-type inertial neural networks with time-varying coefficients and proportional delays. Fuzzy Sets Syst. 2020, 381, 51–67. [Google Scholar] [CrossRef]
- Zhang, J.; Chang, A.; Yang, G. Periodicity on neutral-type inertial neural networks incorporating multiple delays. Symmetry 2021, 13, 2231. [Google Scholar] [CrossRef]
- Zhang, A. Almost periodic solutions for SICNNs with neutral type proportional delays and D operators. Neural Process. Lett. 2018, 47, 57–70. [Google Scholar] [CrossRef]
- Li, B.; Cao, Y.; Li, Y. Almost periodic oscillation in distribution for octonion-valued neutral-type stochastic recurrent neural networks with D operator. Nonlinear Dyn. 2023, 111, 11371–11388. [Google Scholar] [CrossRef]
- Rao, R.; Lin, Z.; Ai, X.; Wu, J. Synchronization of epidemic systems with Neumann boundary value under delayed impulse. Mathematics 2022, 10, 2064. [Google Scholar] [CrossRef]
- Li, G.; Zhang, Y.; Guan, Y.; Li, W. Stability analysis of multi-point boundary conditions for fractional differential equation with non-instantaneous integral impulse. Math. Biosci. Eng. 2023, 20, 7020–7041. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, L. Practical exponential stability of impulsive stochastic food chain system with time-varying delays. Mathematics 2023, 11, 147. [Google Scholar] [CrossRef]
- Xia, M.; Liu, L.; Fang, J.; Zhang, Y. Stability analysis for a class of stochastic differential equations with impulses. Mathematics 2023, 11, 1541. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, L.; Tang, J.; Rao, Y.; Fan, H.; Zhu, J. Hybrid impulsive pinning control for mean square Synchronization of uncertain multi-link complex networks with stochastic characteristics and hybrid delays. Mathematics 2023, 11, 1697. [Google Scholar] [CrossRef]
- Li, K.; Li, R.; Cao, L.; Feng, Y.; Onasanya, B.O. Periodically intermittent control of memristor-based hyper-chaotic bao-like system. Mathematics 2023, 11, 1264. [Google Scholar] [CrossRef]
- Wang, C.; Liu, X.; Jiao, F.; Mai, H.; Chen, H.; Lin, R. Generalized Halanay inequalities and relative application to time-delay dynamical systems. Mathematics 2023, 11, 1940. [Google Scholar] [CrossRef]
- Xue, Y.; Han, J.; Tu, Z.; Chen, X. Stability analysis and design of cooperative control for linear delta operator system. AIMS Math. 2023, 8, 12671–12693. [Google Scholar] [CrossRef]
- Zhu, Q. Stabilization of stochastic nonlinear delay systems with exogenous disturbances and the event-triggered feedback control. IEEE Trans. Autom. Control 2019, 64, 3764–3771. [Google Scholar] [CrossRef]
- Zhu, Q.; Huang, T. H∞ control of stochastic networked control systems with time-varying delays: The event-triggered sampling case. Int. J. Robust Nonlinear Control 2021, 31, 9767–9781. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Song, Y.; Zhang, F.; Zhao, Y. Exponential Stability of a Class of Neutral Inertial Neural Networks with Multi-Proportional Delays and Leakage Delays. Mathematics 2023, 11, 2596. https://doi.org/10.3390/math11122596
Wang C, Song Y, Zhang F, Zhao Y. Exponential Stability of a Class of Neutral Inertial Neural Networks with Multi-Proportional Delays and Leakage Delays. Mathematics. 2023; 11(12):2596. https://doi.org/10.3390/math11122596
Chicago/Turabian StyleWang, Chao, Yinfang Song, Fengjiao Zhang, and Yuxiao Zhao. 2023. "Exponential Stability of a Class of Neutral Inertial Neural Networks with Multi-Proportional Delays and Leakage Delays" Mathematics 11, no. 12: 2596. https://doi.org/10.3390/math11122596