1. Introduction
In previous decades, concepts of fractional order calculus (FOC) have been extensively employed in all areas of science, economics, and engineering fields, and they are growing very fast in developing and describing the behavior of models due to their relation to hereditary, fractals, and memory [
1,
2,
3,
4]. FOC also gives several fractional-order integral and derivative operators and numerical solutions with high accuracy. The classifications of fractional operators are based on the concepts of the singular kernel, non-singular kernel, nonlocal kernel, and non-singular kernel. Some of them are Caputo, Atangana-Baleanu, Caputo-Fabrizio, Riesz, Riemann-Liouville, and Hadamard. For example, the authors in [
5] introduced the operational matrices of fractional Bernstein functions to solve fractional differential equations (FDEs), and Alshbool et al. [
6] proposed the concept of operational matrices based on fractional Bernstein functions for solving integro-differential equations under the Caputo operator. The use of new fractional operators in the geometry of real-world models has made significant advancements in this domain [
7,
8]. In most cases, the researchers have not achieved desirable solutions using integer-order operators. This fact emphasizes the significance of new differential operators in modeling real-world problems.
The most extended area for FOC involves variable-ordered operators because the order of fractional operators could be any arbitrary value. The fractional operators under variable order override the phenomenon of constant-order fractional operators. This encourages us to investigate some new concepts in the proposed manner due to their numerous application areas in engineering and science. The nonlocal characteristics of systems are more apparent with non-constant-order fractional calculus. The FOC with variable order is used to model many phenomena such as anomalous diffusions with constant and variable orders, viscoelastic spherical indentation, transient dispersion in heterogeneous media, alcoholism, and so on [
9,
10,
11,
12]. It is usually more complicated to estimate the explicit solution of fractional differential equations (FDEs) under variable order. Hence, it is necessary to describe numerical approaches for the solution of such problems. There are several schemes for solving FDEs in variable order. Among these schemes, wavelet-related schemes are more attractive and efficient for solving this type of problem due to wavelets’ important features like compact support, spectral accuracy, orthogonality, and localization.
Wavelets [
13,
14] are the good localized and oscillatory functions that give the basis for several spaces. In approximation theory, there is lots of literature available concerning the power series and Fourier series. The approximation of an arbitrary function through wavelet polynomials is a recent development in approximation theory. The wavelet expansion is more generalized than any other expansion, such as the power and Fourier series. The main reason for the discovery of wavelets is that the Fourier series cannot analyze the signal in both the frequency and time domains. The important benefit of the wavelet transform is its ability to analyze the signal simultaneously in the frequency and time domains. Orthogonal wavelets play an important role in solving differential and integral equations. In the past two decades, wavelet approaches have been extensively employed to solve differential equations of arbitrary order arising in numerous engineering and scientific problems. Several researchers have used wavelet-based approximation approaches to solve different classes of differential equations. See these references [
15,
16,
17,
18,
19,
20] for more applications of wavelets.
Here, we introduce the application of FOC under variable-order for the modeling of nonlinear oscillation equations as
with the initial value conditions
where
is the forcing term or prescribed excitation,
is the driving force’s angular frequency,
is the system response, f is the amplitude of the excitation, a & b are constant parameters,
is the damping parameter of the considered system, and
is a fractional Caputo derivative with order
The primary aim of the present work is to estimate a more convenient wavelet solution of the fractional oscillation equation under variable order via the fractional order Bernstein wavelets (FOBWs) basis. The proposed method involves approximating the unknown function using a truncated FOBWs basis. After approximating this function, a series of nonlinear algebraic equations is formed for estimating the wavelet coefficient vector.
This work is significantly helpful for the study of any type of variable-order nonlinear fractional model. Some of the advantages of this work are listed as follows:
The present scheme works for the first time with the Caputo fractional derivative under variable order in the introduced model. This work deals with the replacement of constant order by variable order in the considered nonlinear model under the fractional operator.
From a computational point of view, only fewer terms of FOBWs bases are applied to achieve very satisfactory and effective results in comparison to existing methods, which is a key feature of the mentioned scheme.
The introduced FOBWs are simple bases from a computational point of view; therefore, these bases could be seen as a convenient and appropriate tool in this work for solving the fractional oscillation equation under variable order.
The mentioned scheme is very easy to implement and provides better accuracy in comparison to other existing schemes.
The present study is very useful to investigate the behavior of several nonlinear variable-order fractional models with fewer errors.
The remaining portion of the manuscript is designed as follows:
Section 2 provides the basic preliminaries about fractional operators and special functions.
Section 3 recalls the related work. The definition of FOBW’s basis is given in
Section 4. In
Section 5, the approximation of function through FOBWs has been explained.
Section 6 presents the FOBWs scheme for the evaluation of the fractional oscillation equation under variable order.
Section 7 shows the result of the convergence analysis. In
Section 8, some applications on different parameters are evaluated, which illustrates the efficiency of the mentioned approach. The conclusion is drawn in
Section 9.
2. Preliminaries
In this study, the following concepts of variable order fractional operators and special functions are used.
Definition 1. The fractional Caputo differentiation of with order is given by [21]. Definition 2. The fractional Riemann-Liouville integral of with order is given as [21]. In addition, the connections between fractional Caputo derivatives and fractional Riemann-Liouville integral for
and
are:
Further, the relationship between factorial, gamma function, and binomial coefficients is given as [
22]
Here, denotes the gamma function, and denotes the factorial function, and is the well-known ceiling function or least integer function. For the proposed model, we take n = 2 in the above definitions, so that .
3. Related Work
The oscillation equation is the most classical differential equation in nonlinear dynamics that models systems under self-sustained oscillation and is used as a model in image processing, neurology, electronics, and so on [
23,
24,
25]. Various numerical and analytical approaches have been introduced for solving oscillation equations. Cordshooli and Vahidi [
26] proposed the series solution of the oscillation equation by using the adomian decomposition scheme (ADS). In [
27], Vahidi et al. employed restarted ADS to solve the oscillation equation. In [
28], Doha et al. presented a collocation scheme combined with an ultraspherical wavelet for approximating the oscillation equation. In [
29], the authors presented an efficient solution of the fractional oscillation equation through a modified Legendre wavelet. Khan [
30] presented the approximate solution of the oscillation equation through the homotopy perturbation method. In [
31], Kumar and Varshney proposed the numerical simulation of the Vander Pol equation through the Lindstedt-Poincare scheme. Recently, Hamed et al. [
32] provided a numerical treatment of the stochastic oscillation equation using the Wiener–Hermite expansion approach.
Many physical and biological problems are governed through FDEs under variable order, such as the cable equation [
33], the Rayleigh–Stokes equation [
34], the Schrödinger equation [
35], and so on. The explicit solutions to most of the FDEs in variable order are difficult to find. Therefore, obtaining solutions to such problems has taken the attention of several researchers. A detailed summary of the solutions of FDEs under variable order arising in the fields of biology, engineering, and physics is given in
Table 1. It has been revealed from the literature review that analysis of the mathematical, engineering, and physical models associated with variable-order fractional derivatives rather than derivatives of integer order provides highly significant results.
The oscillation equation has only been solved for fractional constant order, but in this paper, we introduce the oscillation equation under the concept of variable order fractional derivative due to the advantages of employing variable fractional order. In order to more efficiently solve the fractional oscillation equation under variable order, the FOBWs are introduced in this study. The present study aims to extend the applications of FOBWs with collocation techniques to the approximate solutions of fractional oscillation equations under variable order and analyze their behavior with different parameters. The computing complexity of the algebraic set can be decreased due to the structural redundancy of the FOBWs. The errors under several fractional variable orders are computed, which proves the effectiveness of the scheme mentioned. So, keeping all the facts in mind and influenced by the good performance of the above-mentioned approaches, we will employ an effective wavelet approach for the numerical analysis of a variable-order nonlinear fractional model such as the fractional oscillation equation.
4. Development of Fractional Order Bernstein Wavelets
In the current section, first the definition of fractional order Bernstein polynomials is recalled, and then the Bernstein wavelets are constructed in fractional form.
4.1. Fractional Order Bernstein Polynomials
The fractional order Bernstein polynomials of order
are defined in explicit form as [
46]:
The above polynomials in Equation (6) are orthogonal under the weighted function
on [0, 1] as
In addition, the other form of the above polynomials is given as
where
In Equation (8), ‘i’ is a whole number that represents the index value of the given summation, and M is a natural number.
4.2. Fractional Order Bernstein Wavelets
The FOBWs have the arguments: k is a natural number, t represents time, is the order of Bernstein polynomial such that , and
The FOBWs is defined on
as
where
is the fractional order Bernstein polynomials of order
define in
Section 4.1.
The FOBWs are displayed in
Figure 1 for k = 1, M = 5, and
Now, using the above wavelet basis, the approximation of any function in the Hilbert space is stated in next section.
5. Function Approximations via Introduced FOBWs
In order to employ FOBWs for solving the proposed model, we need to map the unknown function to FOBWs. For this, the concept of function approximation is used. The unknown function can be approximated by this concept in terms of a known wavelet function with wavelet coefficients.
Any arbitrary function
can be formulated in a combination of FOBWs as [
13,
40,
47]
For approximation purposes, the truncated form of Equation (11) is written as
where
be the unknown wavelet coefficients associated with FOBWs
given by
In the calculation process, we take which shows the total FOBW basis, and T represents the usual transpose.
The following section presents the FOBWs scheme for the evaluation of the variable-order fractional oscillation equation.
6. Proposed Approach
It has been revealed from the literature review that analysis of the physical, engineering, and mathematical models associated with variable-order fractional derivatives rather than derivatives of constant fractional order or integer order provides highly significant results. Therefore, motivated by the nice performance of the existing approaches given in
Table 1, we apply an effective wavelet approach for the numerical analysis and simulation of the variable-order nonlinear fractional oscillation equation.
The nonlinear model given in Equation (1) can be expressed as
with the condition
To determine the solutions of the above system, the procedure of the mentioned wavelet approach is provided stepwise as follows:
Step I: The proposed method as well as the approximation through FOBWs totally depend on the range of
Since
then approximate the second-order derivative of an unknown function as a linear combination of truncated FOBWs using Equation (12) as
where
is given in Equations (9) and (14) and
is wavelet the coefficients vector.
Using Equations (3)–(5) on Equation (17), we get
where
is calculated directly by using Equation (3) on a known function
for different
.
Step II: Using Equation (5) with the range of
we get
Step III: Substituting Equations (18) and (19) in the given system of Equation (15), we get
Step IV: The set of n non-linear algebraic equations is acquired via collocating the Equation (20) at appropriate Chebyshev grids
as
where appropriate collocation grids
is given by
Step V: Solve the algebraic set of equations formed in Equation (21), we can easily find the unknown wavelet coefficient vectors .
Step VI: Using the value in Equation (18), we determine the wavelet approximation of
Procedure completed.
The graphical structure of the proposed scheme is represented in
Figure 2.
8. Numerical Examples
The suggested approach is applied to the mentioned model (force-free and forced oscillation equations) to examine the performance of the approach for different parameters. All calculations are computed by the software Mathematica 7. In the examples, solutions are computed from t = 0 to t = 1 according to the parameters considered in the FOBWs basis. We can consider values t > 1 by modifying the range of FOBWs. The formula for absolute error is given for comparison purposes and to examine the efficiency of the mentioned approach.
The absolute errors (AEs) between the wavelet approximation function
and the analytical function
is computed as
and the maximum absolute error (MAE) in this case is calculated as
Since the analytical solutions of this model for fractional random order are not available, a residual error function
is introduced to measure the accuracy of the proposed approach as follows:
Example 1. Consider the variable fractional order forced Duffing-Vander pol oscillator equation by replacing the constant fractional order [29] as with the initial value conditions We solve the example for by mentioned scheme and simulate the model for different physically fascinating situations (single-well, double-well, and double-hump well) of the forced Duffing–Vander pol oscillator equation.
In considering the problem, the following two cases of fractional order are considered:
- (i)
Constant order:
- (ii)
Variable order:
Physically fascinating conditions:
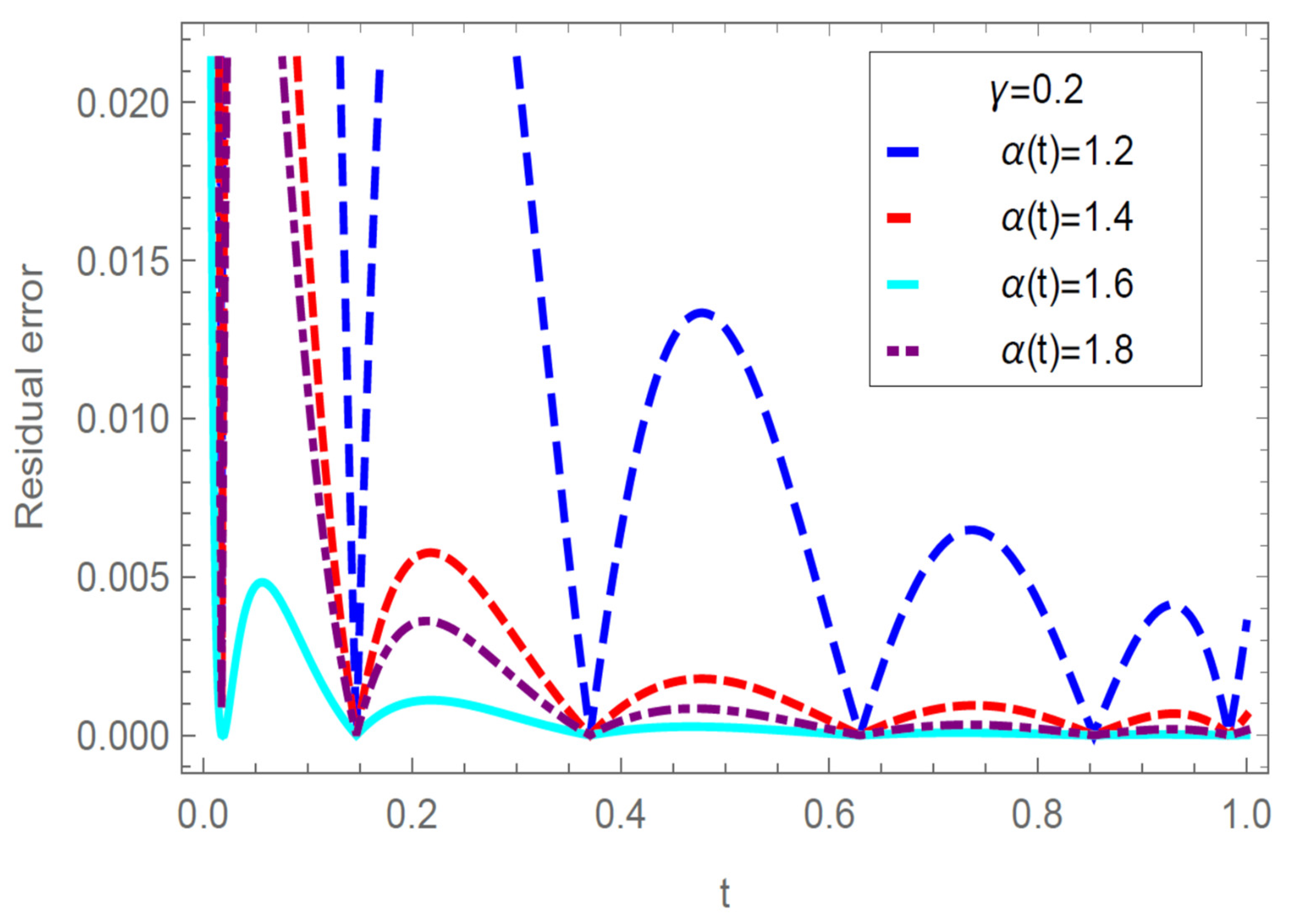
- (A)
For Single-well
The estimated AEs in the solutions of
with the comparison of the Legendre Wavelet–Picard scheme (LWPS) and the ultraspherical wavelets scheme (UWS) for
and different FOBWs bases are listed in
Table 2. It can be easily analyzed from
Table 2 that the suitable value of
is 1 for achieving the best accuracy in the solution of the given model, with
and the proposed approach is superior to UWS [
28] and LWPS [
29] by considering the RK-4 solution [
28] as an approximated analytical solution. The residual errors in
for
and
under different parameters mentioned are presented in
Table 3 and
Table 4, respectively. In addition, the estimated residual errors in the solutions for
and different selections of
are given in
Table 5. The graphical interpretation of residual errors of solutions for the single-well case with selected values of
, and
is shown in
Figure 3. The computed solutions are obtained for the first time with the variable order of the introduced model in terms of residual errors.
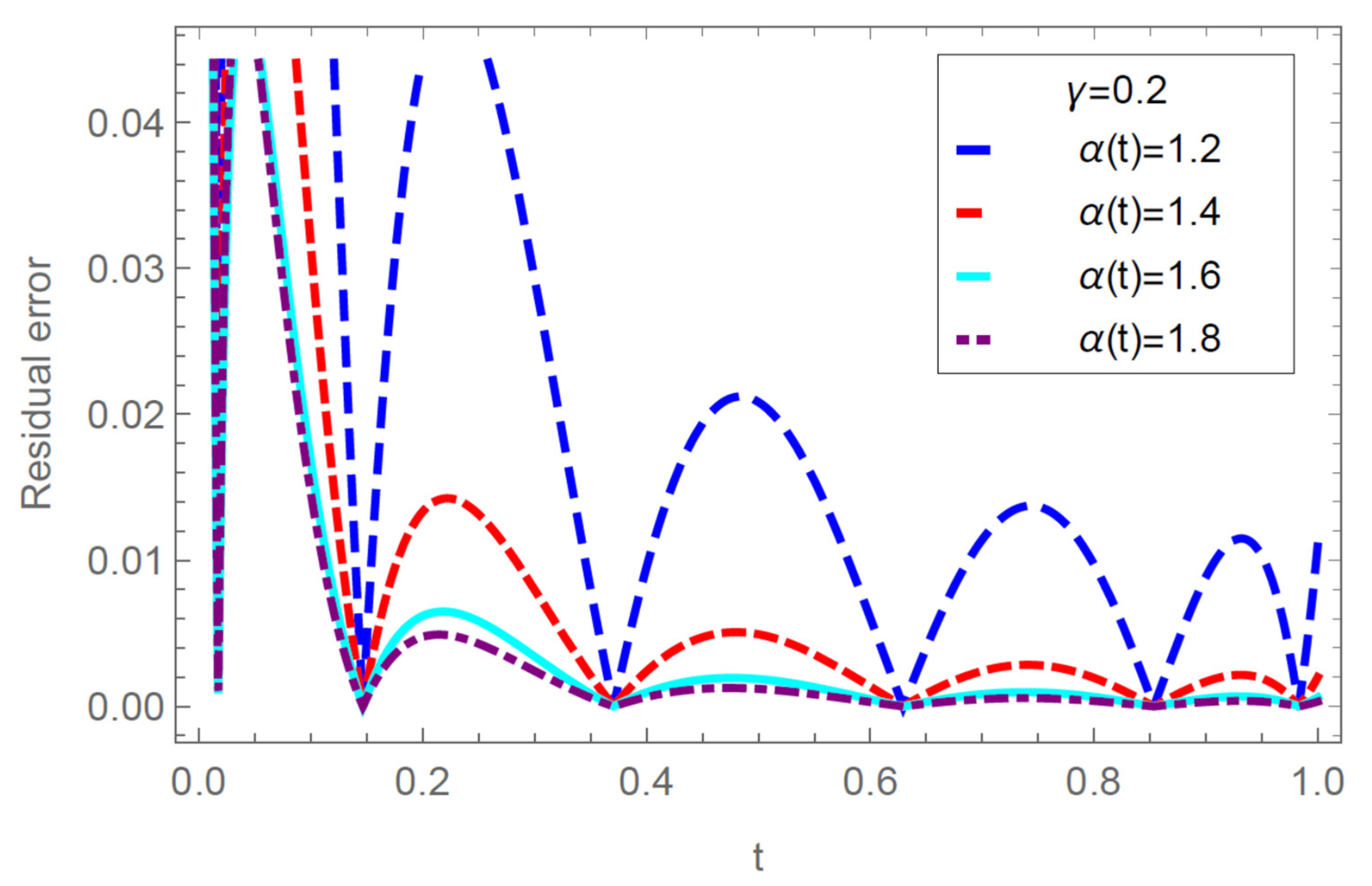
- (B)
For Double-well
The estimated AEs in the solutions of
with the comparison of the Legendre wavelet-Picard scheme (LWPS) and the ultraspherical wavelets scheme (UWS) for
and different FOBWs are listed in
Table 6. It can be easily analyzed from
Table 6 that the suitable value of
is 1 for achieving the best accuracy in the solution of the given model, with
and the proposed approach is superior to UWS [
28] and LWPS [
29] by considering the RK-4 solution [
28] as an approximated analytical solution. The residual errors in the solutions of
for
and
under different parameters mentioned are shown in
Table 7 and
Table 8, respectively. In addition, the estimated residual errors in the solutions for
and selected
are listed in
Table 9. The graphical interpretation of residual errors of solutions for the double-well case with selected values of
, and
is shown in
Figure 4. The computed solutions are obtained for the first time with the variable order of the introduced model in terms of residual errors.
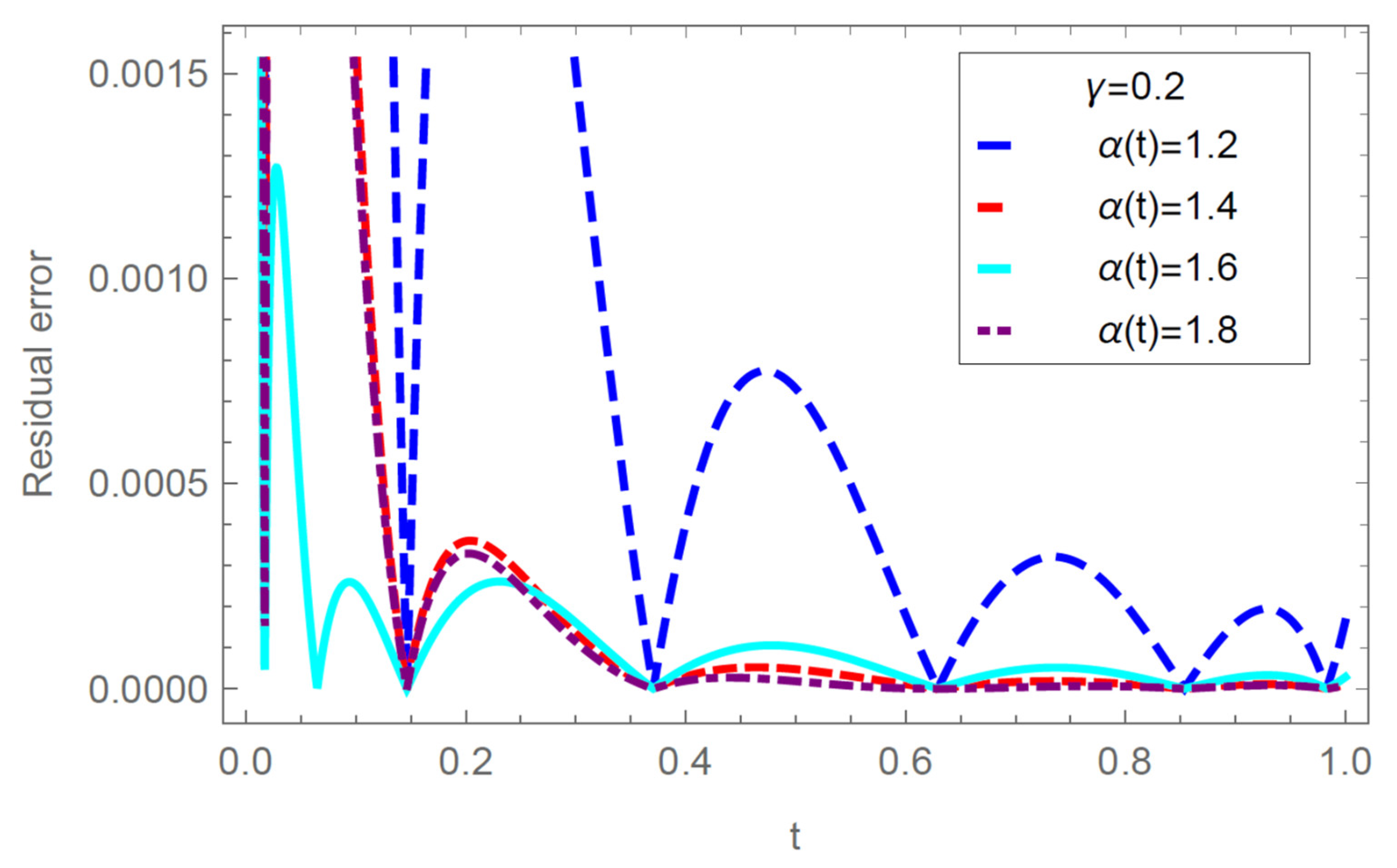
- (C)
For Double-hump well
The estimated AEs in the solutions of
with the comparison of the Legendre wavelet-Picard scheme (LWPS) and the ultraspherical wavelets scheme (UWS) for
and different FOBW bases are listed in
Table 10. It can be easily analyzed from
Table 10 that the suitable value of
is 1 for achieving the best accuracy in the solution of the given model, with
and the proposed approach is superior to UWS [
28] and LWPS [
29] by considering the RK-4 solution [
28] as an approximated analytical solution. The residual error in the solutions of
for
and
with selected parameters is presented in
Table 11 and
Table 12, respectively. Furthermore, the estimated residual errors in the solutions for
and selected
are given in
Table 13. The graphical interpretation of residual errors of solutions for the double hump case with selected values of
, and
is shown in
Figure 5. The computed solutions are obtained for the first time with the variable order of the introduced model in terms of residual errors.
Example 2. Consider the variable fractional order force-free Duffing-Vander pol oscillator equation by replacing the constant fractional order [26] as with the initial value conditions We solve the example for by mentioned scheme and simulate the model for different parameters.
In considering the problem, the following two cases of fractional order are considered:
- (i)
Constant order:
- (ii)
Variable order
The estimated AEs in the solutions of
with the comparison of adomian decomposition scheme (ADS) and restarted adomian decomposition scheme (RADS) for
and different FOBW bases are listed in
Table 14. It can be easily analyzed from
Table 14 that the suitable value of
is 1 for achieving the best accuracy in the solution of the given model, with
and the proposed approach is superior to ADS [
26] and RADS [
27] by considering the Lindsted scheme solution [
26] as an approximated analytical solution. The residual errors in the solutions of
for
and
under different parameters mentioned are presented in
Table 15 and
Table 16, respectively. Furthermore, the estimated residual errors in the solutions for
and selected
are given in
Table 17. The graphical interpretation of residual errors of solutions for selected values of
, and
is shown in
Figure 6. The computed solutions are obtained for the first time with the variable order of the introduced model in terms of residual errors.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}