
Adaptive Finite/Fixed Time Control Design for a Class of Nonholonomic Systems with Disturbances

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- For the first time, the fixed-time stability problem of a nonholonomic system is addressed inside the considered system’s unified framework, with and without output limitations;
- New control approach for the second-order systems of a mobile robot is designed to achieve the fixed-time stability in the presence of external disturbances;
- The upper-bound of perturbations is addressed using an on-line estimation based on adaptive control laws;
- Simulation results using various scenarios in terms of disturbances are carried out in order to validate the theoretical findings of the suggested control strategy.
2. Preliminaries and Conceptualization of the Problem
2.1. Preliminary Considerations for the Finite-/Fixed-Time Stability
2.2. Formulation of the Problem
3. Main Results
3.1. Stabilization of the -Subsystem with Matched Perturbation
3.2. Stabilization of the Second System with Disturbances
- Stabilization of the second system based on NFTSMC method.
- Stabilization of the second system based on the adaptive NFTSMC (ANFTSMC) method.
3.3. Stabilization of Nonholonomic Chained-Form Systems with Unknown Perturbations
- (1)
- For , is used as a constant control input. Then, in the presence of, one may deduce that and converge to zero in the fixed-time based on the result of Theorem 2.
- (2)
- For , the control signal is developed to drive . Consider the LF candidate and its time-derivative as . We chose , then the for all .
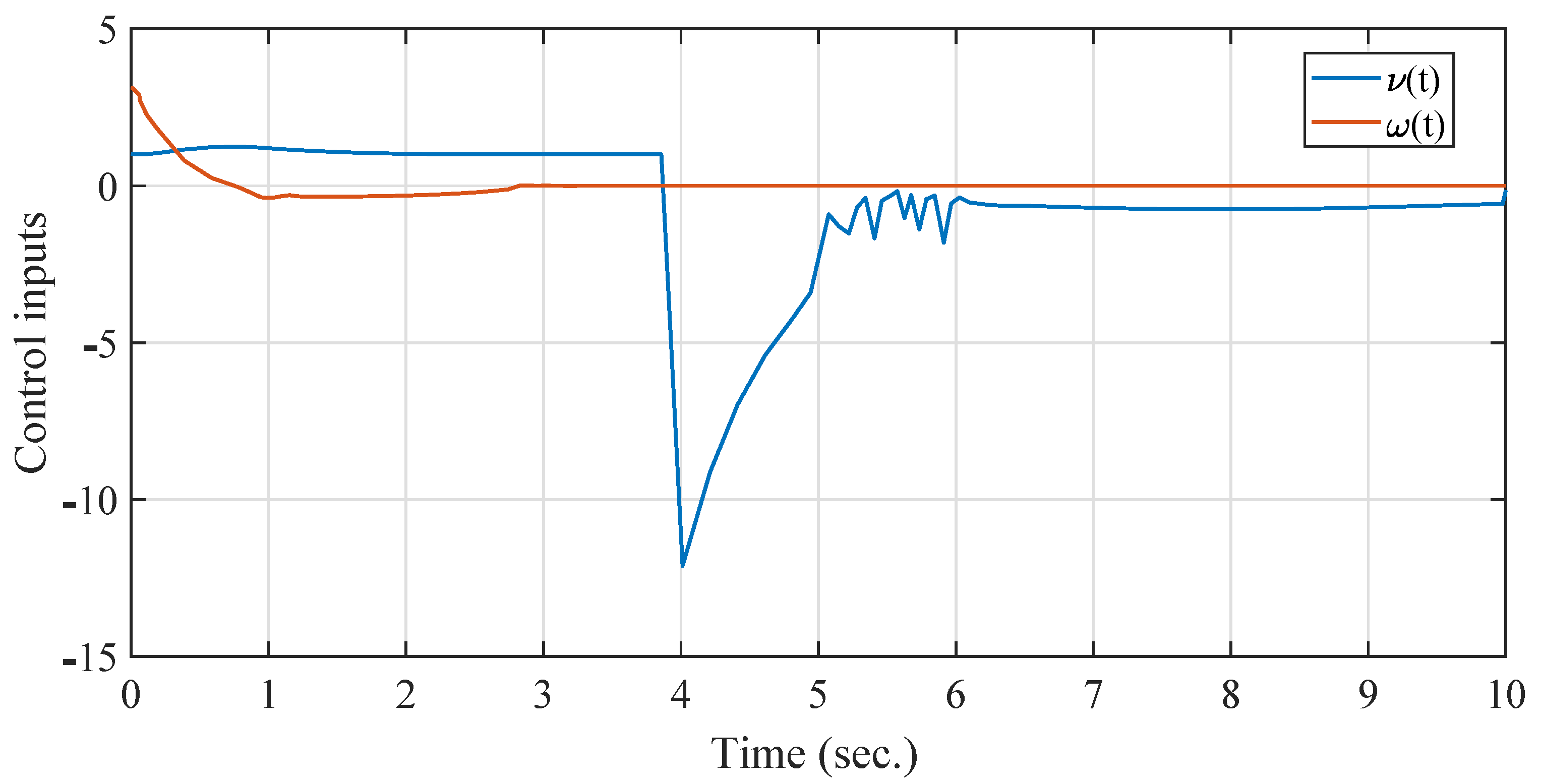
4. Analysis of the Simulation Results
5. Conclusions
- Application of this proposed control strategy in multi-agent systems;
- Experimental validation of the proposed method.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, W.J.; Kwag, S.I.; Ko, Y.D. Optimal capacity and operation design of a robot logistics system for the hotel industry. Tour. Manag. 2020, 76, 103971. [Google Scholar] [CrossRef]
- Dutta, V.; Zielińska, T. Cybersecurity of Robotic Systems: Leading Challenges and Robotic System Design Methodology. Electronics 2021, 10, 2850. [Google Scholar] [CrossRef]
- Yaacoub, J.-P.A.; Noura, H.N.; Salman, O.; Chehab, A. Robotics cyber security: Vulnerabilities, attacks, countermeasures, and recommendations. Int. J. Inf. Secur. 2022, 21, 115–158. [Google Scholar] [CrossRef] [PubMed]
- Defoort, M.; Murakami, T. Second order sliding mode control with disturbance observer for bicycle stabilization. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2822–2827. [Google Scholar]
- Li, H.; Xie, P.; Yan, W. Receding horizon formation tracking control of constrained underactuated autonomous underwater vehicles. IEEE Trans. Ind. Electron. 2017, 64, 5004–5013. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, J.; Parra-Vega, V.; Sánchez-Orta, A.; Sánchez-Torres, J.D. Adaptive Fuzzy Velocity Field Control for Navigation of Nonholonomic Mobile Robots. J. Intell. Robot. Syst. 2021, 101, 38. [Google Scholar] [CrossRef]
- Astolfi, A. Discontinuous control of nonholonomic systems. Syst. Control Lett. 1996, 27, 37–45. [Google Scholar] [CrossRef]
- Xu, W.L.; Huo, W. Variable structure exponential stabilization of chained systems based on the extended non-holonomic integrator. Syst. Control Lett. 2000, 41, 225–235. [Google Scholar] [CrossRef]
- Kolmanovsky, I.; McClamroch, N.H. Hybrid feedback laws for a class of cascade nonlinear control systems. IEEE Trans. Autom. Control 1996, 41, 1271–1282. [Google Scholar] [CrossRef]
- Tian, Y.P.; Li, S. Exponential stabilization of nonholonomic dynamic systems by smooth time-varying control. Automatica 2002, 38, 1139–1146. [Google Scholar] [CrossRef]
- Yuan, H.L.; Qu, Z.H. Smooth time-varying pure feedback control for chained nonholonomic systems with exponential convergent rate. IET Control Theory Appl. 2010, 4, 1235–1244. [Google Scholar] [CrossRef]
- Ge, S.S.; Wang, Z.P.; Lee, T.H. Adaptive stabilization of uncertain nonholonomic systems by state and output feedback. Automatica 2003, 39, 1451–1460. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, Y. Global robust stabilization for nonholonomic systems with dynamic uncertainties. J. Frankl. Inst. 2019, 357, 1357–1377. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y.; Liu, Y. Finite-time stabilization for a class of switched stochastic nonlinear systems with dead-zone input nonlinearities. Int. J. Robust Nonlinear Control 2018, 28, 3239–3257. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y.; Huang, J.; Liu, Y. Output feedback stabilization within prescribed finite time of asymmetric time-varying constrained nonholonomic systems. Int. J. Robust Nonlinear Control 2021, 31, 427–446. [Google Scholar] [CrossRef]
- Yao, H.; Gao, F.; Huang, J.; Wu, Y. Barrier Lyapunov functions-based fixed-time stabilization of nonholonomic systems with unmatched uncertainties and time-varying output constraints. Nonl. Dyn. 2020, 99, 2835–2849. [Google Scholar] [CrossRef]
- Gao, F.; Huang, J.; Shi, X.; Zhu, X. Nonlinear mapping-based fixed-time stabilization of uncertain nonholonomic systems with time-varying state constraints. J. Franklin Inst. 2020, 357, 6653–6670. [Google Scholar] [CrossRef]
- Sánchez-Torres, J.D.; Defoort, M.; Muñoz-Vázquez, A.J. Predefined-time stabilisation of a class of nonholonomic systems. Int. J. Control 2020, 93, 2941–2948. [Google Scholar] [CrossRef]
- Park, B.S.; Yoo, S.J.; Park, J.B.; Choi, Y.H. Adaptive output-feedback control for trajectory tracking of electrically driven non-holonomic mobile robots. IET Control Theory Appl. 2011, 5, 830–838. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, A.J.; Sánchez-Torres, J.D.; Parra-Vega, V.; Sánchez-Orta, A.; Martínez-Reyes, F. Robust contour tracking of nonholonomic mobile robots via adaptive velocity field motion planning scheme. Int. J. Adapt. Control Signal Process. 2019, 33, 890–899. [Google Scholar] [CrossRef]
- Huang, J.; Wen, C.; Wang, W.; Jiang, Z.P. Adaptive stabilization and tracking control of a nonholonomic mobile robot with input saturation and disturbance. Syst. Control Lett. 2013, 62, 234–241. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Bhat, S.; Bernstein, D. Geometric homogeneity with applications to finite time stability. Math. Control Signals Syst. 2005, 17, 101–127. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Stonier, R. Continuous finite-time control for robotic manipulators with terminal sliding modes. In Proceedings of the Sixth International Conference of Information Fusion, Cairns, Australia, 8–11 July 2003; pp. 1433–1440. [Google Scholar]
- Moulay, E.; Perruquetti, W. Finite time stability and stabilization of a class of continuous systems. J. Math. Anal. Appl. 2006, 323, 1430–1443. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances. ISA Trans. 2019, 99, 290–304. [Google Scholar] [CrossRef] [PubMed]
- Boukattaya, M.; Mezghani, N.; Damak, T. Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems. ISA Trans. 2018, 77, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Lin, P.; Ma, J.; Zheng, Z. Robust adaptive sliding mode control for uncertain nonlinear MIMO system with guaranteed steady state tracking error bounds. J. Frankl. Inst. 2016, 353, 303–321. [Google Scholar]
- Zhihong, M.; Yu, X. Adaptive terminal sliding mode tracking control for rigid robotic manipulators with uncertain dynamics. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 1997, 40, 493–502. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2016, 21, 1865–1879. [Google Scholar] [CrossRef]
- Asl, S.B.F.; Moosapour, S.S. Adaptive backstepping fast terminal sliding mode controller design for ducted fan engine of thrust-vectored aircraft. Aerosp. Sci. Technol. 2017, 71, 521–529. [Google Scholar]
- Defoort, M.; Demesure, G.; Zuo, Z.; Polyakov, A.; Djemai, M. Fixed-time stabilisation and consensus of non-holonomic systems. IET Control Theory Appl. 2016, 10, 2497–2505. [Google Scholar] [CrossRef]



















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Labbadi, M.; Boubaker, S.; Kamel, S.; Alsubaei, F.S. Adaptive Finite/Fixed Time Control Design for a Class of Nonholonomic Systems with Disturbances. Mathematics 2023, 11, 2287. https://doi.org/10.3390/math11102287
Labbadi M, Boubaker S, Kamel S, Alsubaei FS. Adaptive Finite/Fixed Time Control Design for a Class of Nonholonomic Systems with Disturbances. Mathematics. 2023; 11(10):2287. https://doi.org/10.3390/math11102287
Chicago/Turabian StyleLabbadi, Moussa, Sahbi Boubaker, Souad Kamel, and Faisal S. Alsubaei. 2023. "Adaptive Finite/Fixed Time Control Design for a Class of Nonholonomic Systems with Disturbances" Mathematics 11, no. 10: 2287. https://doi.org/10.3390/math11102287