
Mathematical Methods for an Accurate Navigation of the Robotic Telescopes

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
- Preliminary sky identification in the CCD-frames in a series, which allows finding the consistency between all objects in such CCD-frames in a series.
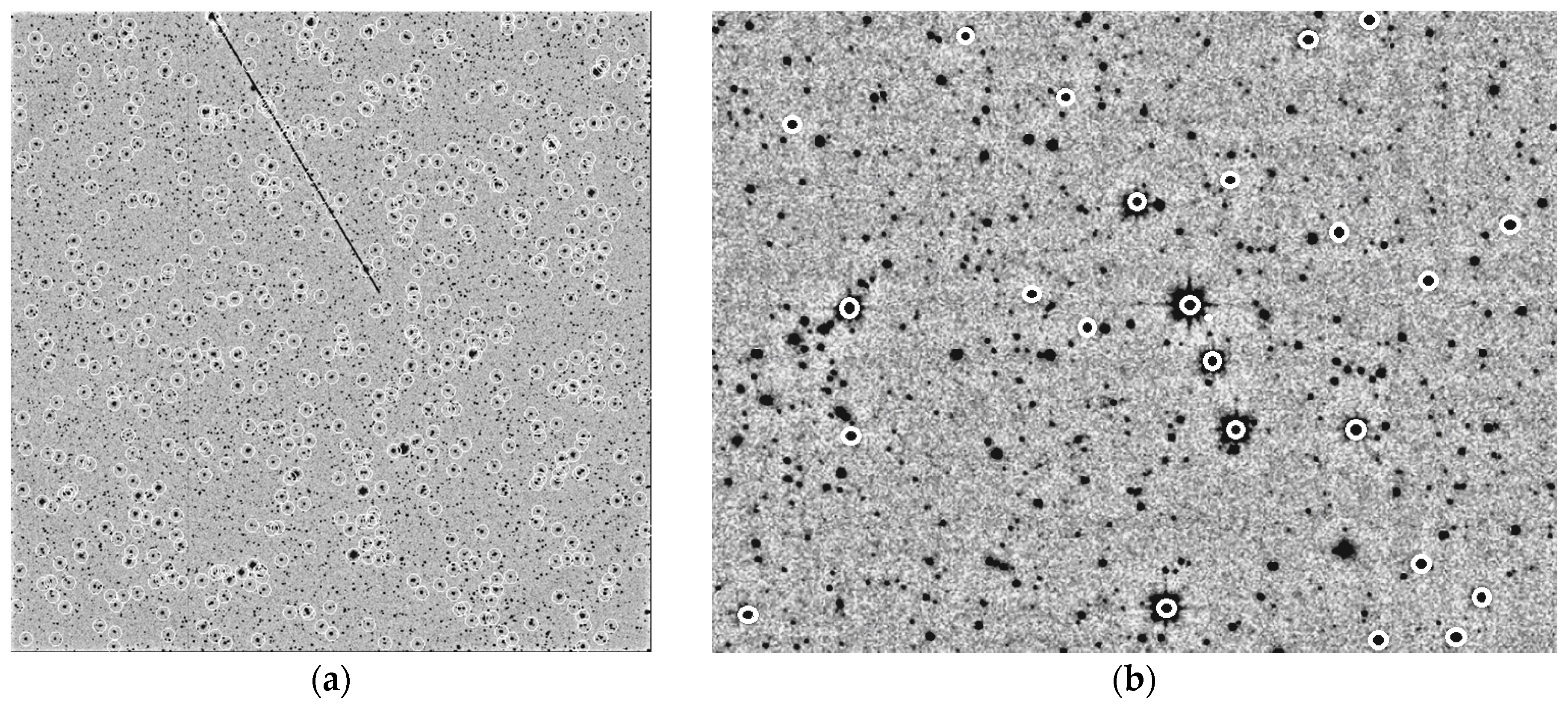
- Automatic selection of the reference astronomical objects (stars) [25] in the CCD-frame, which have fixed positional celestial coordinates in the sky.
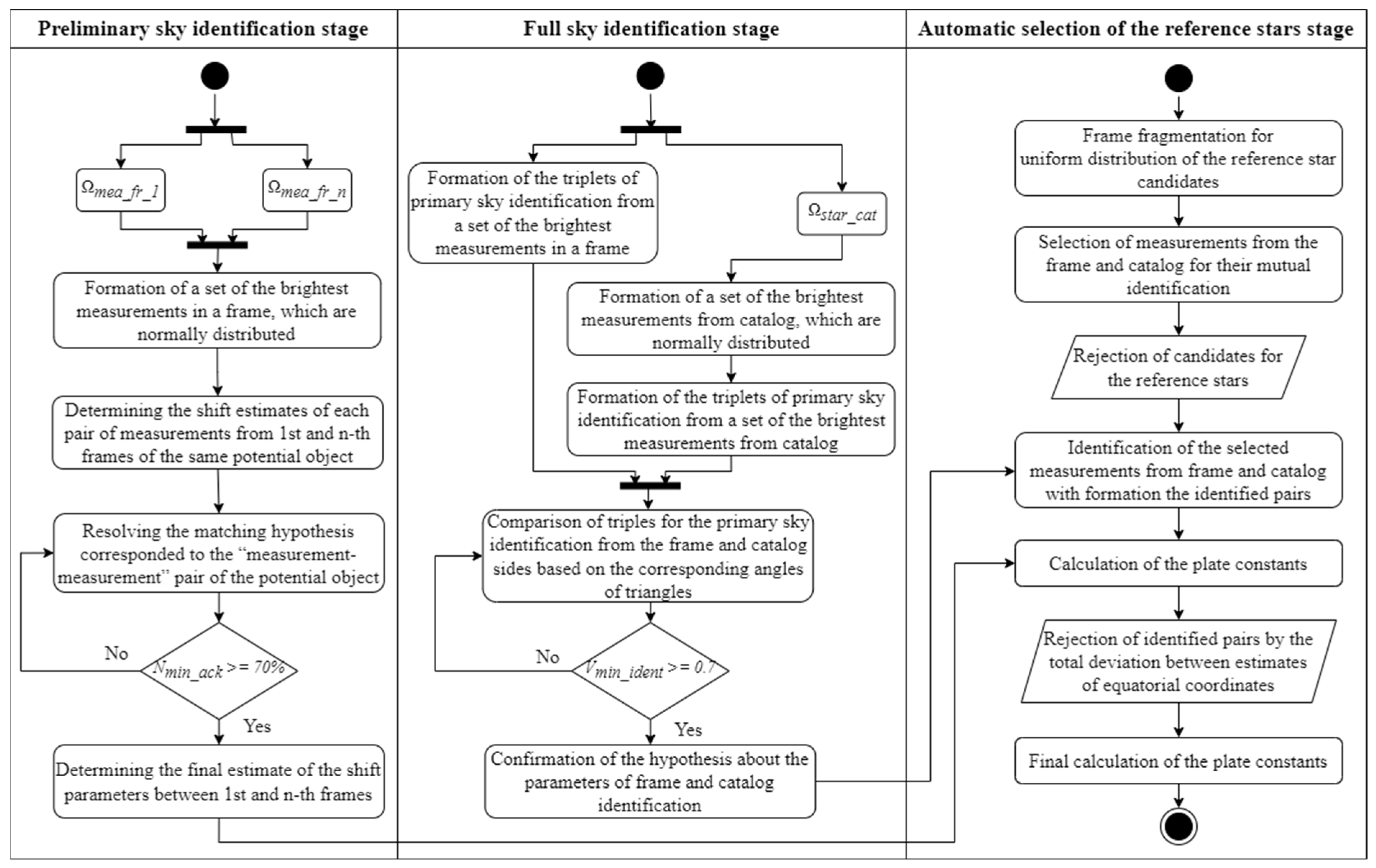
2.1. Preliminary Sky Identification
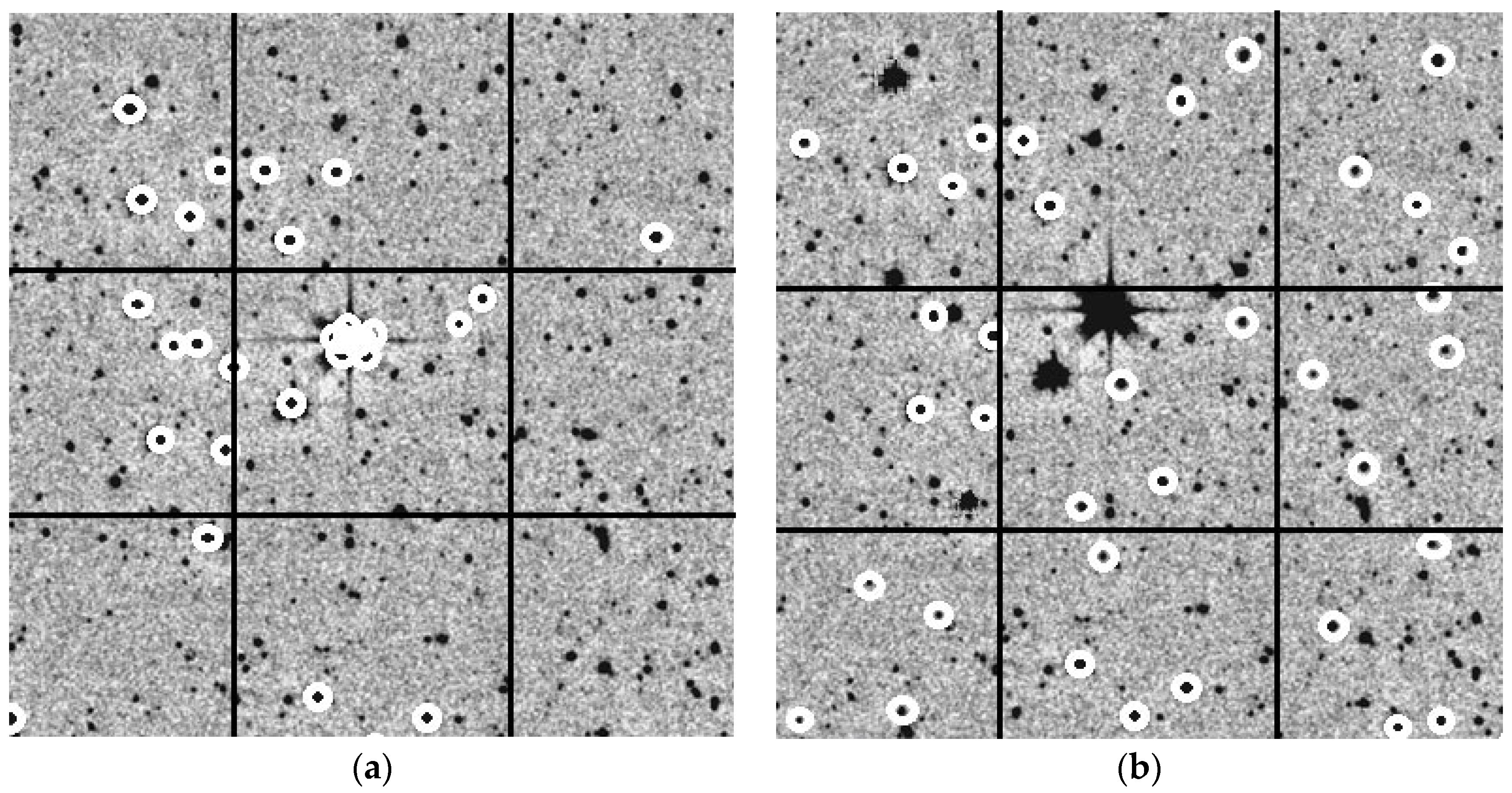
- The frame is divided into a set of equal regions Mreg × Mreg. Sets of the brightest measurements in frame are formed based on an equal predetermined number Nmea_reg of measurements with the highest brightness estimates corresponding to the hypothetical objects selected from each region.
- Selecting of the next measurement from a preselected set of the brightest measurements in the first frame. There should be no more than three such measurements. If, during the process, this step is reached for the fourth time (trying to select the fourth measurement), an emergency exit is performed with a message about identification failure. This is usually associated with large errors in estimating the anchoring coordinates of center in the identified frame.
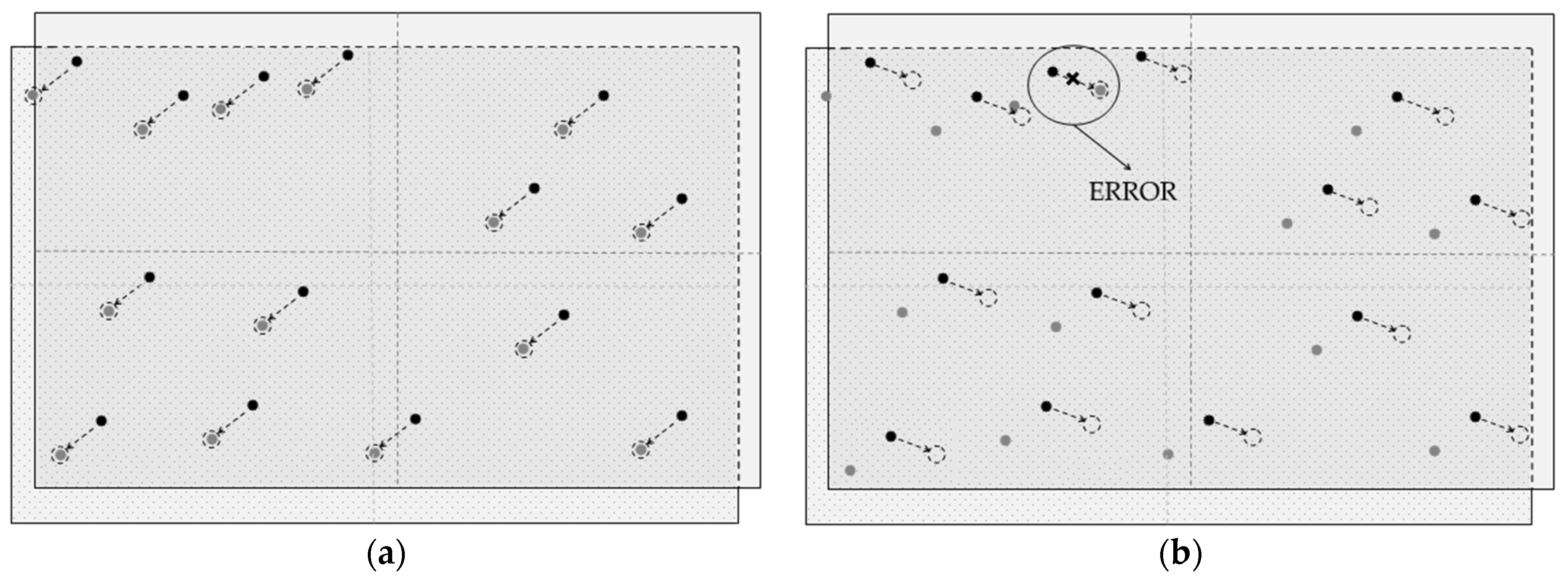
- The investigated measurement of the first frame is put in correspondence with the next measurement of the second frame from a preselected set of measurements of the second frame (a cycle is organized according to the investigated measurements of the second frame). For this, a conditional estimate of the shift parameters is preliminarily calculated by the pair hypothesis, according to Equations (1) and (2).
- For each selected pair (steps 2 and 3), the weight of the next hypothesis about the correspondence of pairs of measurements of the first and second frames (measurement of the frame and the star catalog) to the same object is estimated. For this, each measurement of the first frame is compared with each measurement of the second frame. Additionally, the shift parameters (1) and (2) are added to the measurement coordinates of the first frame. Based on the deviations between the measurements of the first and second frames, a fact that the measurements of the second frame fall into the acknowledgment area (strobe) is determined.
- If a sufficient number of measurements of the second frame fell into the strobe, then it is considered that the hypothesis about the combination of pairs of measurements of the first and second frames is confirmed (go to step 6). If not, then the hypothesis about the shift parameters is considered false and a transition is made (to step 3) to the next measurement of the second frame. When the preselected set of measurements of the second frame is exhausted, a transition is made to the next measurement of the first frame (to step 2). If this set is also exhausted, a message is displayed about the impossibility of identifying the measurements of the first and second frames.
- The final estimate of the shift parameters (3) and (4) is calculated.
2.2. Full Sky Identification
- For a set of measurements of a CCD-frame, when forming the triplets of primary sky identification, the following sequence of operations is performed.
- Formation of a set Ωbl50 of the brightest measurements in a CCD-frame, consisting of Nbl50 applicants when choosing triplets of primary identification. To ensure a stability of the identification results, the frame is divided into parts. The specified number of frame measurements Nbl50 is divided by the number of frame fragments, and in each such fragment, the brightest frame measurements are selected.
- Formation of an additional set Ωbl100 of the brightest measurements in a CCD-frame, consisting of Nbl100 elements evenly distributed in a frame (by analogy with 1a). The set Ωbl100 is used to confirm the hypotheses of primary identification (formation of a weight of the next hypothesis about the correspondence of triples in frame and the astronomical catalog).
- For a set of measurements of the astronomical catalog, when forming the triplets of primary sky identification, the following sequence of operations is performed.
- Formation of a set Ωstar100 of catalog measurements, considering the uniform distribution of stars in the investigated area of the sky.
- Formation of an additional set Ωstar200 of catalog measurements, consisting of Nstar200 elements, which are used to confirm the hypotheses of primary identification.
- Enumeration and confirmation of hypotheses of the primary sky identification.
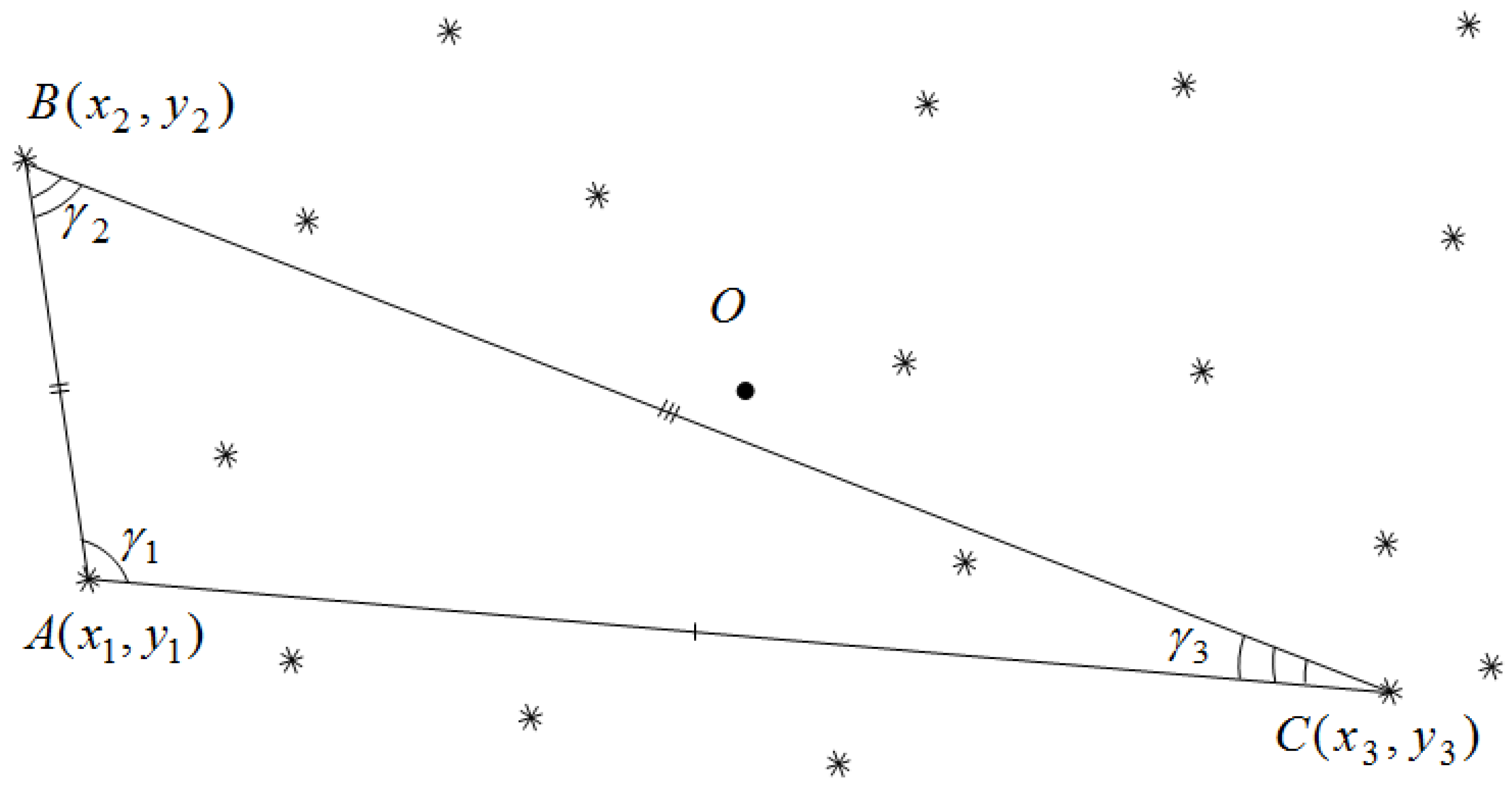
- Enumerating the measurements of a set Ωbl50 as elements of triples of the primary sky identification. The measurements that make up the triple of the primary sky identification must satisfy the conditions (9) and (10).
- Enumeration of a set Ωstar100 of catalog measurements as elements of triples of the primary sky identification from the astronomical catalog side.
- Comparison of triples of measurements for the primary sky identification from the frame and catalog sides based on the corresponding angles of triangles, the values of which are calculated according to Equations (11)–(16).
- Confirmation of the hypothesis about the parameters of frame and catalog identification, which corresponds to the considered triplets of the primary sky identification. The hypothesis is recognized as true if during the identification process of the sets Ωbl100 and Ωstar200 the formed admissible pairs exceed the predefined value vmin_ident. When the identification hypothesis is confirmed, further enumeration stops.
2.3. Automatic Selection of the Reference Stars
- Frame fragmentation for uniform distribution of the reference star candidates in a CCD-frame.
- Selection of measurements from the frame and catalog for their mutual identification.
- Rejection of candidates for the reference stars:
- Identification of the selected measurements from the frame and catalog with the formation of identified pairs.
- Calculation of the plate constants (19) (at each next step with a higher degree model).
- Rejection of identified pairs by the total deviation (21) between estimates of equatorial coordinates in an identified pair (22).
- Final calculation of the plate constants.
- The UML-diagram of the developed mathematical methods for the sky identification is presented in Figure 5.
2.4. Accuracy Indicators of Estimates of the Angular Position and Brightness of the Reference Stars
3. Results
3.1. Real Astronomical Data Sources
3.2. Reference Data Sources
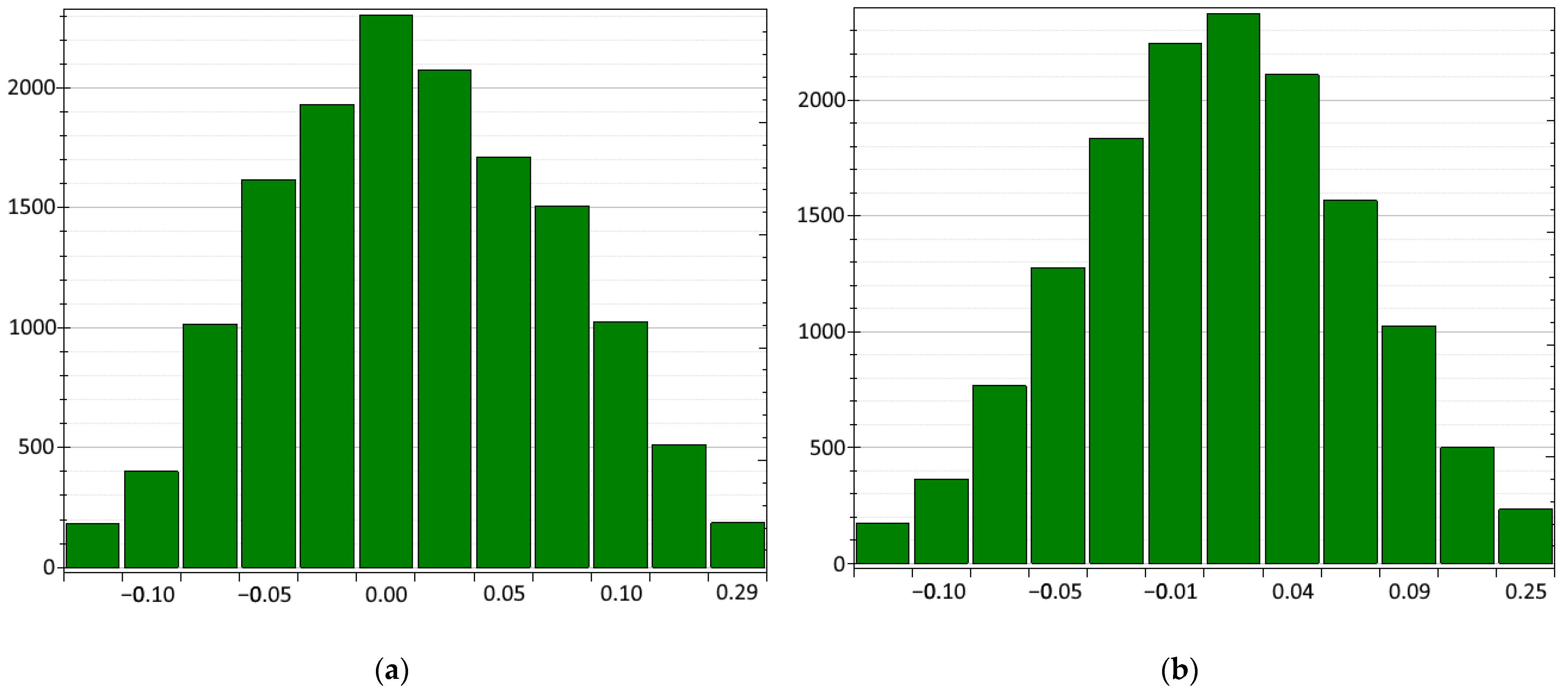
3.3. Accuracy of the Developed Mathematical Methods for the Sky Identification
- Mean deviation (27)–(29);
- Max. deviation module;
- Min. deviation module;
- Standard deviation of estimates (30)–(32).
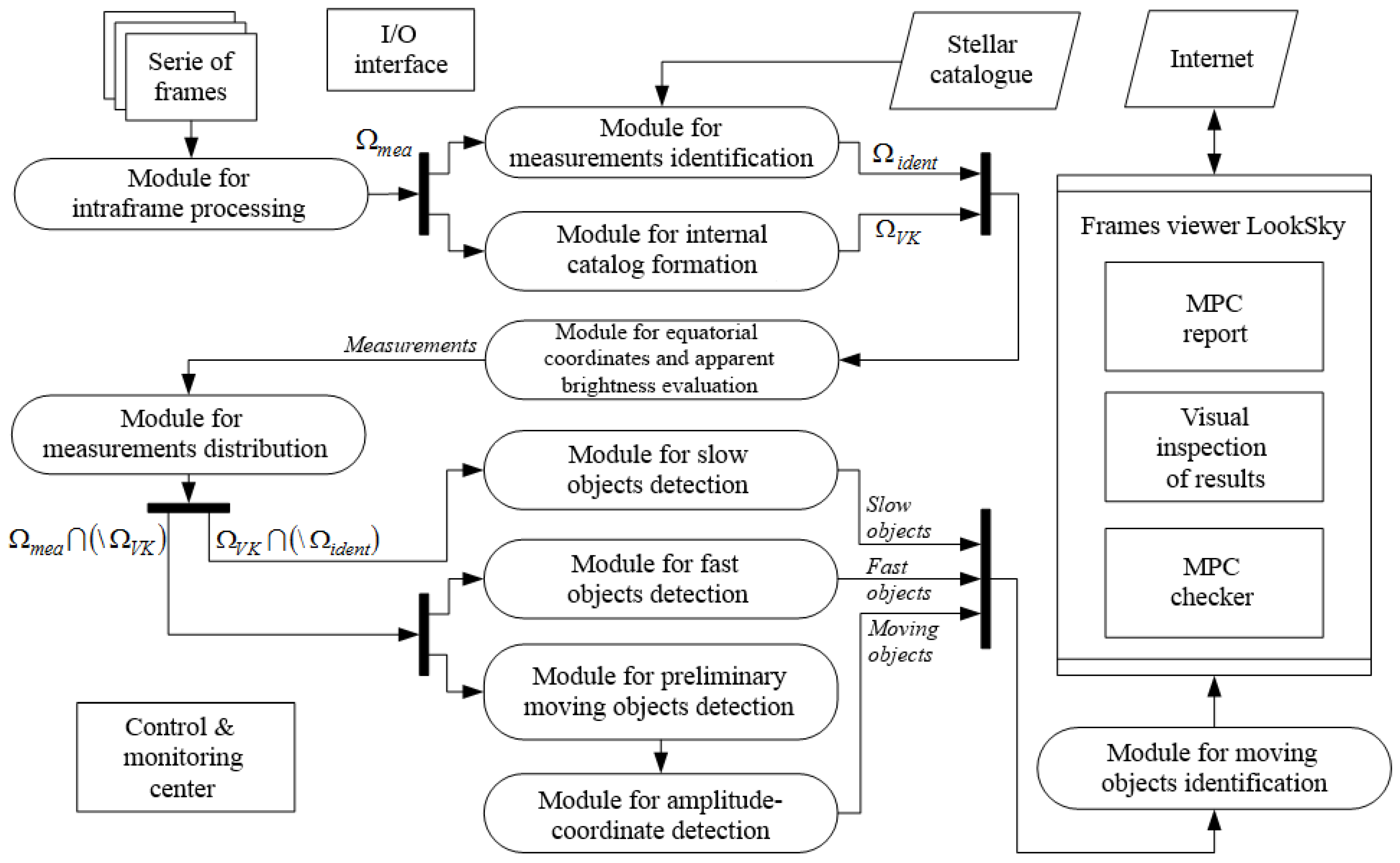
3.4. Implementation in the CoLiTec Software
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- Radius Rrej of the acknowledgment circular area (strobe) is Rrej = 20 pixels;
- Minimum allowable number of acknowledgments Nmin_ack = 70%;
- Number of equal regions Mreg×Mreg, on which frame is divided into is Mreg×Mreg = 4×4;
- Number Nmea_reg of measurements with the highest brightness estimates in frame is ;
- Number Nbl50 of measurements (candidates) in frame for the role of elements of triplets (vertices of triangles) of the primary sky identification is Nbl50 = 50;
- Number Nbl100 of elements of the set Ωbl100 of measurements in frame used to confirm the hypotheses of the primary sky identification is Nbl100 = 100;
- Ratio of the number of elements of the sets Ωbl100 and Ωbl50 of measurements in frame was assumed to be equal to kblob = Nbl100/Nbl50 = 2;
- Number of regions Mreg, on which frame is divided into is Mreg = 4;
- Number Nstar100 of stars (candidates) in astrometric catalog for the role of elements of triplets (vertices of triangles) of the primary sky identification is Nstart100 = 100;
- Number Nstar200 of stars of the set Ωstar200 of measurements in astrometric catalog used to confirm the hypotheses of the primary sky identification is Nstar200 = 200;
- Ratio of the number of elements of the sets Ωstar200 and Ωstar100 of measurements in frame was assumed to be equal to kstar = Nstar200/Nstar100 = 2;
- Maximum allowable minimal distance between the second and first points of the triple of the primary sky identification, expressed in the angular measurements of a CCD-frame is kh = 0.1;
- Under the condition of a rectangular (not square) frame, to determine the minimum distance between the second and first points of the triple, the value kh is multiplied by the average value of the frame size for both coordinates;
- Maximum allowable deviation of values of the corresponding angles of the triangles (from a CCD-frame and the astrometric catalog sides) of the primary sky identification is Δᵞ = 60′.
- Limiting maximum value of the distance between the elements of an identified pair, at which it is considered valid is Δrident = 10 pixels;
- Minimum allowable ratio of the number of allowed pairs to the set Ωbl100 size is vmin_ident = 0.7.
References
- Ackermann, M.; Ajello, M.; Albert, A.; Allafort, A.; Atwood, W.B.; Axelsson, M.; Baldini, L.; Ballet, J.; Barbiellini, G.; Bastieri, D.; et al. The Fermi large area telescope on orbit: Event classification, instrument response functions, and calibration. Astrophys. J. Suppl. Ser. 2012, 203, 4. [Google Scholar] [CrossRef]
- Savanevych, V.E.; Briukhovetskyi, A.B.; Ivashchenko, Y.N.; Vavilova, I.B.; Bezkrovniy, M.M.; Dikov, E.N.; Vlasenko, V.P.; Sokovikova, N.S.; Movsesian, I.S.; Dikhtyar, N.Y.; et al. Comparative analysis of the positional accuracy of CCD measurements of small bodies in the solar system software CoLiTec and Astrometrica. Kinemat. Phys. Celest. Bodies 2015, 31, 302–313. [Google Scholar] [CrossRef]
- Schroeder, D.J. Astronomical Optics; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Smith, G. Nobel Lecture: The invention and early history of the CCD. Rev. Mod. Phys. 2010, 82, 2307–2312. [Google Scholar] [CrossRef]
- Adam, G.K.; Kontaxis, P.A.; Doulos, L.T.; Madias, E.-N.D.; Bouroussis, C.A.; Topalis, F.V. Embedded microcontroller with a CCD camera as a digital lighting control system. Electronics 2019, 8, 33. [Google Scholar] [CrossRef]
- Mykhailova, L. Method of maximum likelihood estimation of compact group objects location on CCD-frame. East.-Eur. J. Enterp. Technol. 2014, 5, 16–22. [Google Scholar]
- Savanevych, V.; Briukhovetskyi, O.B.; Sokovikova, N.S.; Bezkrovny, M.M.; Vavilova, I.B.; Ivashchenko, Y.M.; Elenin, L.V.; Khlamov, S.; Movsesian, I.S.; Dashkova, A.M.; et al. A new method based on the subpixel Gaussian model for accurate estimation of asteroid coordinates. Mon. Not. R. Astron. Soc. 2015, 451, 3287–3298. [Google Scholar] [CrossRef]
- Hale, S.J.; Chaplin, W.J.; Davies, G.R.; Elsworth, Y.P. A next generation upgraded observing platform for the automated Birmingham Solar Oscillations Network (BiSON). In Software and Cyberinfrastructure for Astronomy VI; SPIE: Bellingham, WA, USA, 2020; Volume 11452. [Google Scholar]
- Singha, J.; Basu, A.; Krishnakumar, M.A.; Joshi, B.C.; Arumugam, P. A real-time automated glitch detection pipeline at Ooty Radio Telescope. Mon. Not. R. Astron. Soc. 2021, 505, 5488–5496. [Google Scholar] [CrossRef]
- Roberts, W.T.; Antsos, D.; Croonquist, A.; Piazzolla, S.; Roberts, L.C.; Garkanian, V.; Trinh, T.; Wright, M.W.; Rogalin, R.; Wu, J.; et al. Overview of Ground Station 1 of the NASA space communications and navigation program. Free. Space Laser Commun. Atmos. Propag. XXVIII 2016, 9739, 97390B. [Google Scholar]
- Tarasov, S.M. A Study on the Effect Produced by Instrumental Error of Automated Astronomical System on Landmark Azimuth Accuracy. Gyroscopy Navig. 2021, 12, 178–185. [Google Scholar] [CrossRef]
- Gayvoronsky, S.V.; Kuzmina, N.V.; Tsodokova, V.V. High-accuracy determination of the Earth’s gravitational field parameters using automated zenith telescope. In Proceedings of the 24th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), Saint Petersburg, Russia, 29–31 May 2017; pp. 1–4. [Google Scholar]
- Lösler, M.; Eschelbach, C.; Riepl, S. A modified approach for automated reference point determination of SLR and VLBI telescopes: First investigations at Satellite Observing System Wettzell. Tech. Mess. 2018, 85, 616–626. [Google Scholar] [CrossRef]
- Hampson, K.M.; Gooding, D.; Cole, R.; Booth, M.J. High precision automated alignment procedure for two-mirror telescopes. Appl. Opt. 2019, 58, 7388–7391. [Google Scholar] [CrossRef] [PubMed]
- Parimucha, Š.; Savanevych, V.E.; Briukhovetskyi, O.B.; Khlamov, S.V.; Pohorelov, A.V.; Vlasenko, V.P.; Dubovský, P.A.; Kudzej, I. CoLiTecVS—A new tool for an automated reduction of photometric observations. Contrib. Astron. Obs. Skaln. Pleso 2019, 49, 151–153. [Google Scholar]
- Savanevych, V.; Akhmetov, V.; Khlamov, S.; Dikov, E.; Briukhovetskyi, A.; Vlasenko, V.; Khramtsov, V.; Movsesian, I. Selection of the reference stars for astrometric reduction of CCD-frames. Adv. Intell. Syst. Comput. 2020, 1080, 881–895. [Google Scholar]
- Akhmetov, V.; Khlamov, S.; Dmytrenko, A. Fast coordinate cross-match tool for large astronomical catalogue. Adv. Intell. Syst. Comput. 2019, 871, 3–16. [Google Scholar]
- Vavilova, I.; Pakuliak, L.; Babyk, I.; Elyiv, A.; Dobrycheva, D.; Melnyk, O. Surveys, catalogues, databases, and archives of astronomical data. In Knowledge Discovery in Big Data from Astronomy and Earth Observation; Astrogeoinformatics; Elsevier: Amsterdam, The Netherlands, 2020; pp. 57–102. [Google Scholar]
- Akhmetov, V.; Khlamov, S.; Khramtsov, V.; Dmytrenko, A. Astrometric reduction of the wide-field images. Adv. Intell. Syst. Comput. 2020, 1080, 896–909. [Google Scholar]
- Khlamov, S.; Savanevych, V. Big astronomical datasets and discovery of new celestial bodies in the Solar System in automated mode by the CoLiTec software. In Knowledge Discovery in Big Data from Astronomy and Earth Observation; Astrogeoinformatics; Elsevier: Amsterdam, The Netherlands, 2020; pp. 331–345. [Google Scholar]
- Khlamov, S.; Savanevych, V.; Briukhovetskyi, O.; Oryshych, S. Development of computational method for detection of the object’s near-zero apparent motion on the series of CCD–frames. East. Eur. J. Enterp. Technol. 2016, 2, 41–48. [Google Scholar] [CrossRef]
- Tantsiura, A. Evaluation of the potential accuracy of correlation extreme navigation systems of low-altitude mobile robots. Int. J. Adv. Trends Comput. Sci. Eng. 2019, 8, 2161–2166. [Google Scholar] [CrossRef]
- Savanevych, V.; Khlamov, S.; Akhmetov, V.; Briukhovetskyi, A.; Vlasenko, V.; Dikov, E.; Kudzej, I.; Dubovsky, P.; Mkrtichian, D.; Tabakova, I.; et al. CoLiTecVS software for the automated reduction of photometric observations in CCD-frames. Astron. Comput. 2022, 40, 15. [Google Scholar] [CrossRef]
- Savanevych, V.; Khlamov, S.; Vlasenko, V.; Deineko, Z.; Briukhovetskyi, O.; Tabakova, I.; Trunova, T. Formation of a typical form of an object image in a series of digital frames. East.-Eur. J. Enterp. Technol. 2022, 6, 51–59. [Google Scholar]
- Yeromina, N.; Tarshyn, V.; Petrov, S.; Samoylenko, V.; Tabakova, I.; Dmitriiev, O.; Surkova, K.; Danylko, O.; Kushnierova, N.; Soroka, M.; et al. Method of reference image selection to provide high-speed aircraft navigation under conditions of rapid change of flight trajectory. Int. J. Adv. Technol. Eng. Explor. 2021, 8, 1621–1638. [Google Scholar]
- Khlamov, S.; Savanevych, V.; Briukhovetskyi, O.; Pohorelov, A. CoLiTec software-detection of the near-zero apparent motion. Proc. Int. Astron. Union 2016, 12, 349–352. [Google Scholar] [CrossRef]
- Akhmetov, V.; Khlamov, S.; Tabakova, I.; Hernandez, W.; Hipolito, J.I.N.; Fedorov, P. New approach for pixelization of big astronomical data for machine vision purpose. In Proceedings of the IEEE International Symposium on Industrial Electronics, Vancouver, BC, Canada, 12–14 June 2019; pp. 1706–1710. [Google Scholar]
- Zhilenkov, A.; Chernyi, S.; Sokolov, S.; Nyrkov, A. Algorithmic approach of destabilizing factors of improving the technical systems efficiency. Vibroeng. Procedia 2017, 13, 261–265. [Google Scholar] [CrossRef]
- Akhmetov, V.; Khlamov, S.; Savanevych, V.; Dikov, E. Cloud computing analysis of Indian ASAT test on March 27, 2019. In Proceedings of the IEEE International Scientific-Practical Conference: Problems of Infocommunications Science and Technology, Kyiv, Ukraine, 8–11 October 2019; pp. 315–318. [Google Scholar]
- Branham, R.L., Jr. Astronomical data reduction with total least squares. New Astron. Rev. 2001, 45, 649–661. [Google Scholar] [CrossRef]
- Burger, W.; Burge, M. Principles of Digital Image Processing: Fundamental Techniques; Springer: New York, NY, USA, 2009. [Google Scholar]
- Sommerville, D.M.Y. Analytical Geometry of Three Dimensions; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Fischer, G. Complex Analytic Geometry; Springer: New York, NY, USA, 2006; Volume 538. [Google Scholar]
- Legault, T. Astrophotography; Rocky Nook, Inc.: San Rafael, CA, USA, 2014. [Google Scholar]
- Khlamov, S.; Vlasenko, V.; Savanevych, V.; Briukhovetskyi, O.; Trunova, T.; Chelombitko, V.; Tabakova, I. Development of computational method for matched filtration with analytic profile of the blurred digital image. East.-Eur. J. Enterp. Technol. 2022, 5, 24–32. [Google Scholar]
- Gonzalez, R.; Woods, R. Digital Image Processing, 4th ed.; Pearson: New York, NY, USA, 2018. [Google Scholar]
- Kwiatkowski, T.; Koleńczuk, P.; Kryszczyńska, A.; Oszkiewicz, D.; Kamiński, K.; Kamińska, M.K.; Troianskyi, V.; Skiff, B.; Moskowitz, N.; Kashuba, V.; et al. Photometry and model of near-Earth asteroid 2021 DW1 from one apparition. Astron. Astrophys. 2021, 656, A126. [Google Scholar] [CrossRef]
- Starck, J.-L.; Murtagh, F. Astronomical image and data analysis. In Astronomy and Astrophysics Library, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Steger, C.; Ulrich, M.; Wiedemann, C. Machine Vision Algorithms and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Lehmann, E.; Romano, J.; Casella, G. Testing Statistical Hypotheses; Springer: New York, NY, USA, 2005; Volume 3. [Google Scholar]
- The Minor Planet Center (MPC) of the International Astronomical Union. Available online: https://minorplanetcenter.net (accessed on 1 March 2023).
- List of Observatory Codes: IAU Minor Planet Center. Available online: https://minorplanetcenter.net/iau/lists/ObsCodesF.html (accessed on 1 March 2023).
- Molotov, I.; Agapov, V.; Kouprianov, V.; Titenko, V.; Rumyantsev, V.; Biryukov, V.; Borisov, G.; Burtsev, Y.; Khutorovsky, Z.; Kornienko, G.; et al. ISON worldwide scientific optical network. In Proceedings of the Fifth European Conference on Space Debris, Darmstadt, Germany, 30 March–2 April 2009; ESA: Paris, France, 2009; Volume 7, p. SP-672. [Google Scholar]
- Li, T.; DePoy, D.L.; Marshall, J.L.; Nagasawa, D.Q.; Carona, D.W.; Boada, S. Monitoring the atmospheric throughput at Cerro Tololo Inter-American Observatory with aTmCam. Ground-Based Airborne Instrum. Astron. V 2014, 9147, 2194–2205. [Google Scholar]
- Zacharias, N.; Finch, C.T.; Girard, T.M.; Henden, A.; Bartlett, J.L.; Monet, D.G.; Zacharias, M.I. The fourth US naval observatory CCD astrograph catalog (UCAC4). Astron. J. 2013, 145, 44. [Google Scholar] [CrossRef]
- Luo, X.; Gu, S.; Xiang, Y.; Wang, X.; Yeung, B.; Ng, E.; Bai, J.; Fan, Y.; Xu, F.; Cao, D.; et al. Active longitudes and starspot evolution of the young rapidly rotating star USNO-B1.0 1388−0463685 discovered in the Yunnan–Hong Kong survey. Mon. Not. R. Astron. Soc. 2022, 514, 1511–1521. [Google Scholar] [CrossRef]
- Shvedun, V.; Khlamov, S. Statistical modelling for determination of perspective number of advertising legislation violations. Actual Probl. Econ. 2016, 184, 389–396. [Google Scholar]
- Khlamov, S.; Savanevych, V.; Briukhovetskyi, O.; Pohorelov, A.; Vlasenko, V.; Dikov, E. CoLiTec Software for the Astronomical Data Sets Processing. In Proceedings of the 2018 IEEE 2nd International Conference on Data Stream Mining and Processing (DSMP), Lviv, Ukraine, 21–25 August 2018; Volume 8478504, pp. 227–230. [Google Scholar]
- Khlamov, S.; Savanevych, V.; Briukhovetskyi, O.; Tabakova, I.; Trunova, T. Data Mining of the Astronomical Images by the CoLiTec Software. CEUR Workshop Proc. 2022, 3171, 1043–1055. [Google Scholar]
- Borne, K. Scientific data mining in astronomy. In Data Mining and Knowledge Discovery Series; Chapman and Hall/CRC: Boca Raton, FL, USA, 2008; pp. 115–138. [Google Scholar]
- Zhang, Y.; Zhao, Y.; Cui, C. Data mining and knowledge discovery in database of astronomy. Prog. Astron. 2002, 20, 312–323. [Google Scholar]
- Gaia Follow-Up Network for Solar System Objects. Available online: https://gaiafunsso.imcce.fr (accessed on 1 March 2023).
- Vavilova, I.B.; Yatskiv, Y.S.; Pakuliak, L.K.; Andronov, I.L.; Andruk, V.M.; Protsyuk, Y.I.; Savanevych, V.E.; Savchenko, D.O.; Savchenko, V.S. UkrVO astroinformatics software and web-services. Proc. Int. Astron. Union 2016, 12, 361–366. [Google Scholar] [CrossRef]
- Ivanov, M.; Sergiyenko, O.; Mercorelli, P.; Hernandez, W.; Tyrsa, V.; Hernandez-Balbuena, D.; Rodriguez Quinonez, J.C.; Kartashov, V.; Kolendovska, M.; Iryna, T. Effective informational entropy reduction in multi-robot systems based on real-time TVS. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; Volume 8781209, pp. 1162–1167. [Google Scholar]
- Baranova, V.; Zeleniy, O.; Deineko, Z.; Bielcheva, G.; Lyashenko, V. Wavelet Coherence as a Tool for Studying of Economic Dynamics in Infocommunication Systems. In Proceedings of the IEEE International Scientific-Practical Conference Problems of Infocommunications, Science and Technology, Kyiv, Ukraine, 8–11 October 2019; pp. 336–340. [Google Scholar]
- Kirichenko, L.; Alghawli, A.S.A.; Radivilova, T. Generalized approach to analysis of multifractal properties from short time series. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 183–198. [Google Scholar] [CrossRef]
- Klette, R. Concise Computer Vision; Springer: London, UK, 2014. [Google Scholar]
- Kirichenko, L.; Zinchenko, P.; Radivilova, T. Classification of time realizations using machine learning recognition of recurrence plots. Adv. Intell. Syst. Comput. 2021, 1246 AISC, 687–696. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Processed Measurements | 30,391 | 28,872 | 27,352 |
|---|---|---|---|
| Rejection percentage of the worst measurements, % | 0 | 5 | 10 |
| Mean deviation of RA, arcsec | 0.003 | 0.002 | 0.001 |
| Mean deviation of DE, arcsec | 0.002 | 0.001 | 0.001 |
| Mean deviation of brightness, mag. | 0.03 | 0.03 | 0.03 |
| Max. deviation module of RA, arcsec | 0.32 | 0.15 | 0.13 |
| Max. deviation module of DE, arcsec | 0.33 | 0.14 | 0.12 |
| Min. deviation module of brightness, mag. | 0.002 | 0.001 | 0.001 |
| Max. deviation module of brightness, mag. | 3.51 | 0.51 | 0.36 |
| Standard deviation of RA, arcsec | 0.08 | 0.08 | 0.07 |
| Standard deviation of DE, arcsec | 0.07 | 0.07 | 0.06 |
| Standard deviation of brightness, mag. | 0.38 | 0.38 | 0.37 |
| Processing Results | Number |
|---|---|
| Astronomical observations | >700,000 |
| Discoveries of the Solar System objects (SSOs) | >1600 |
| Discoveries of the Comets | 5 |
| Discoveries of the Near-Earth objects (NEOs) | 5 |
| Discoveries of the Trojan asteroids of Jupiter | 21 |
| Discoveries of the Centaurs | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Savanevych, V.; Khlamov, S.; Briukhovetskyi, O.; Trunova, T.; Tabakova, I. Mathematical Methods for an Accurate Navigation of the Robotic Telescopes. Mathematics 2023, 11, 2246. https://doi.org/10.3390/math11102246
Savanevych V, Khlamov S, Briukhovetskyi O, Trunova T, Tabakova I. Mathematical Methods for an Accurate Navigation of the Robotic Telescopes. Mathematics. 2023; 11(10):2246. https://doi.org/10.3390/math11102246
Chicago/Turabian StyleSavanevych, Vadym, Sergii Khlamov, Oleksandr Briukhovetskyi, Tetiana Trunova, and Iryna Tabakova. 2023. "Mathematical Methods for an Accurate Navigation of the Robotic Telescopes" Mathematics 11, no. 10: 2246. https://doi.org/10.3390/math11102246