
Motion-Compensated PET Image Reconstruction via Separable Parabolic Surrogates
 , , , ,
, , , ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Maximum Likelihood Expectation Maximization Image Reconstruction
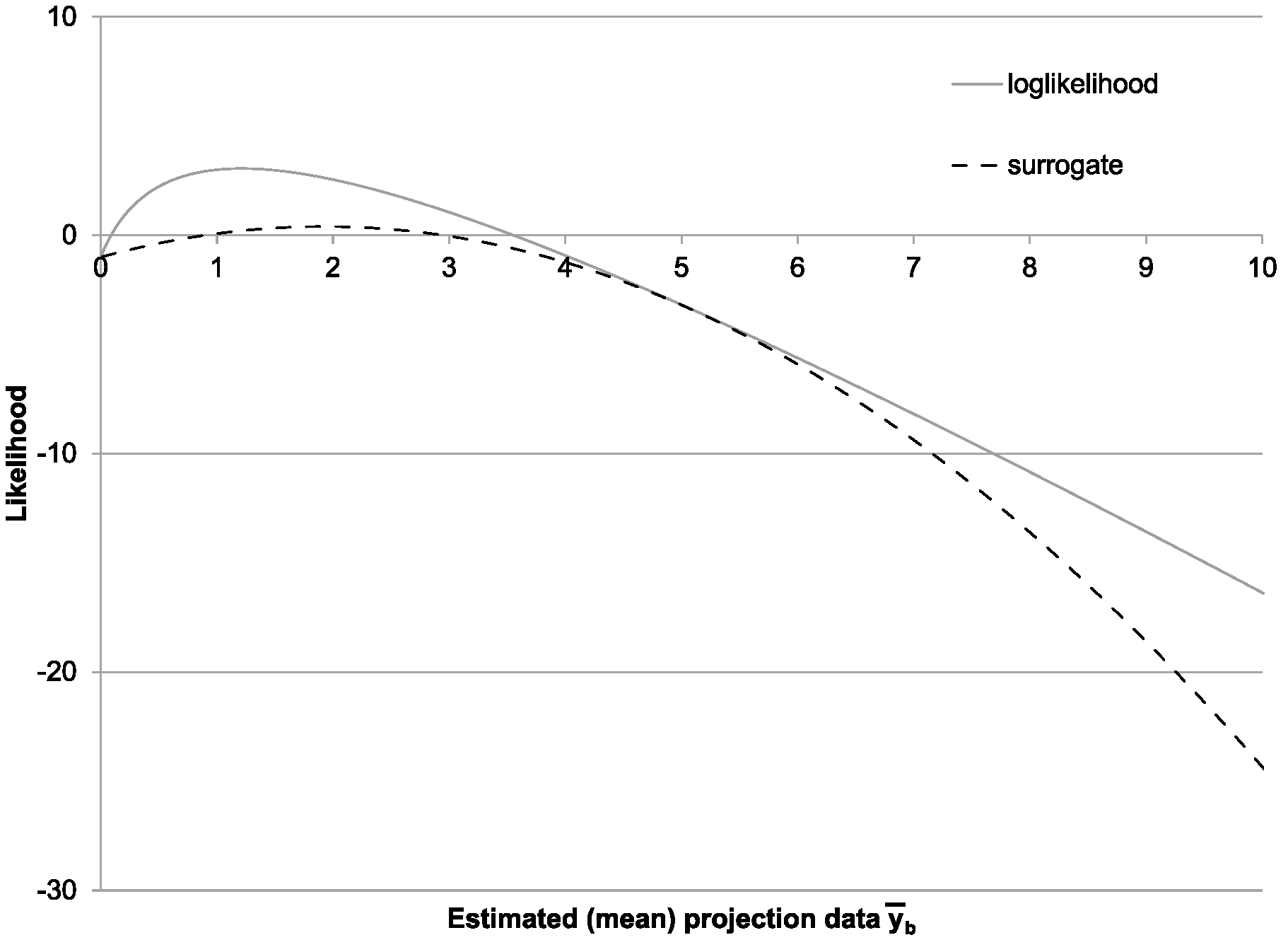
3. Parabolic Surrogates Image Reconstruction
4. Motion-Compensated Expectation Maximization Image Reconstruction
5. Motion-Compensated Separable Parabolic Surrogates Image Reconstruction
5.1. MC-SPS: Motion-Compensated Separable Parabolic Surrogates Image Reconstruction
5.2. MC-OSSPS: Motion-Compensated Ordered-Subsets Separable Parabolic Surrogates Image Reconstruction
6. Numerical Implementation and Results
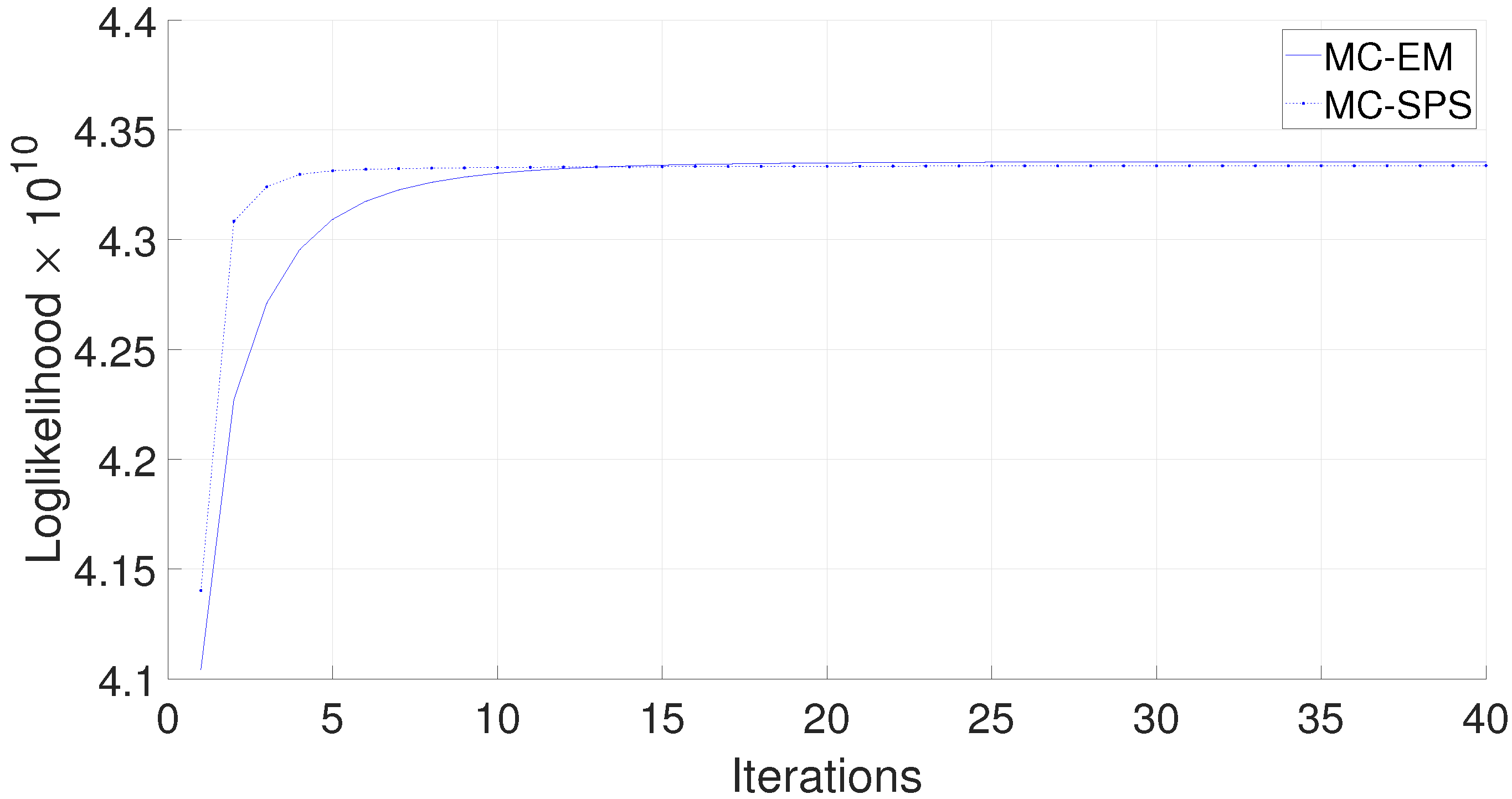
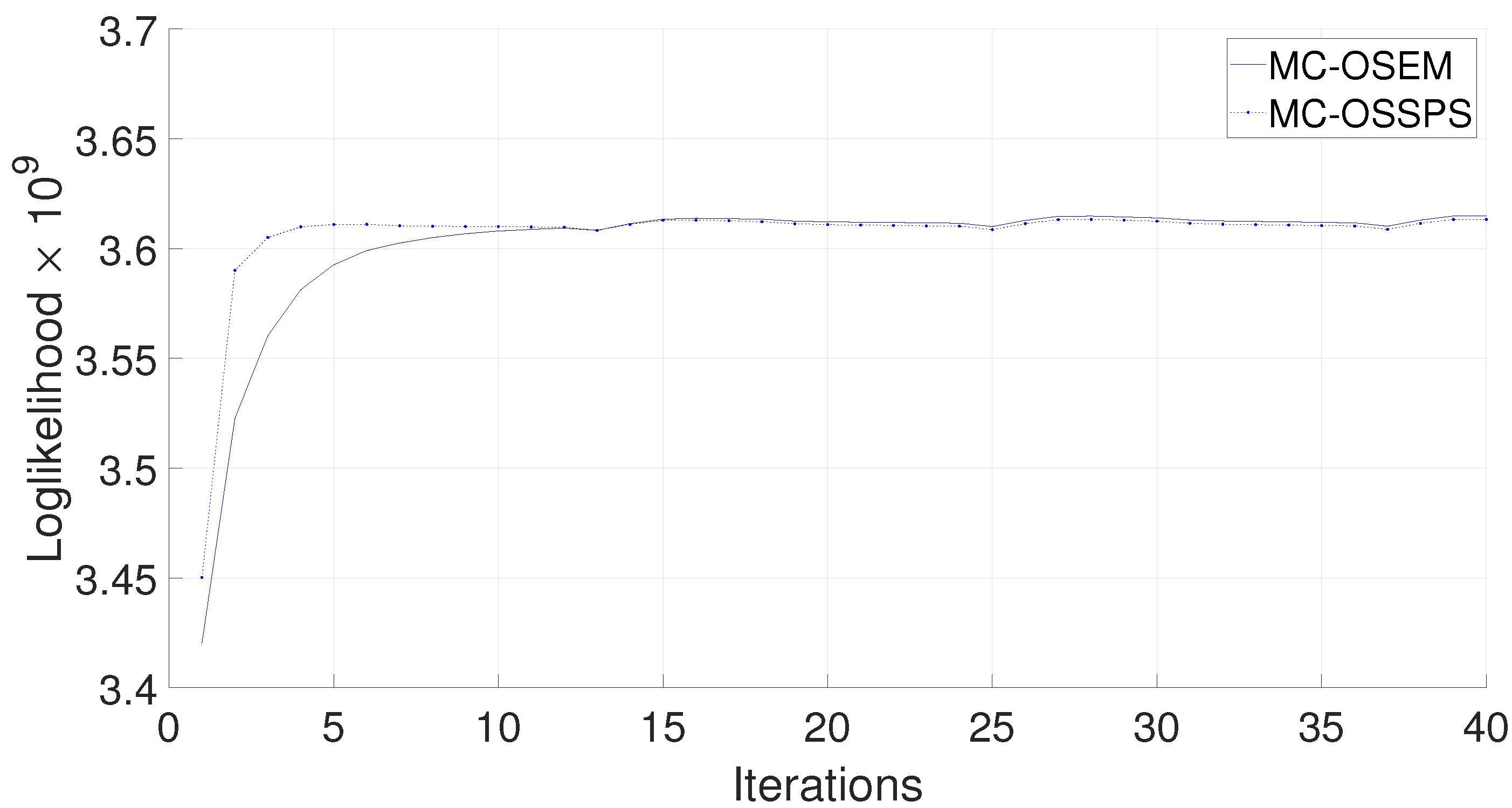
6.1. Comparison of Motion-Compensated SPS and EM Algorithms
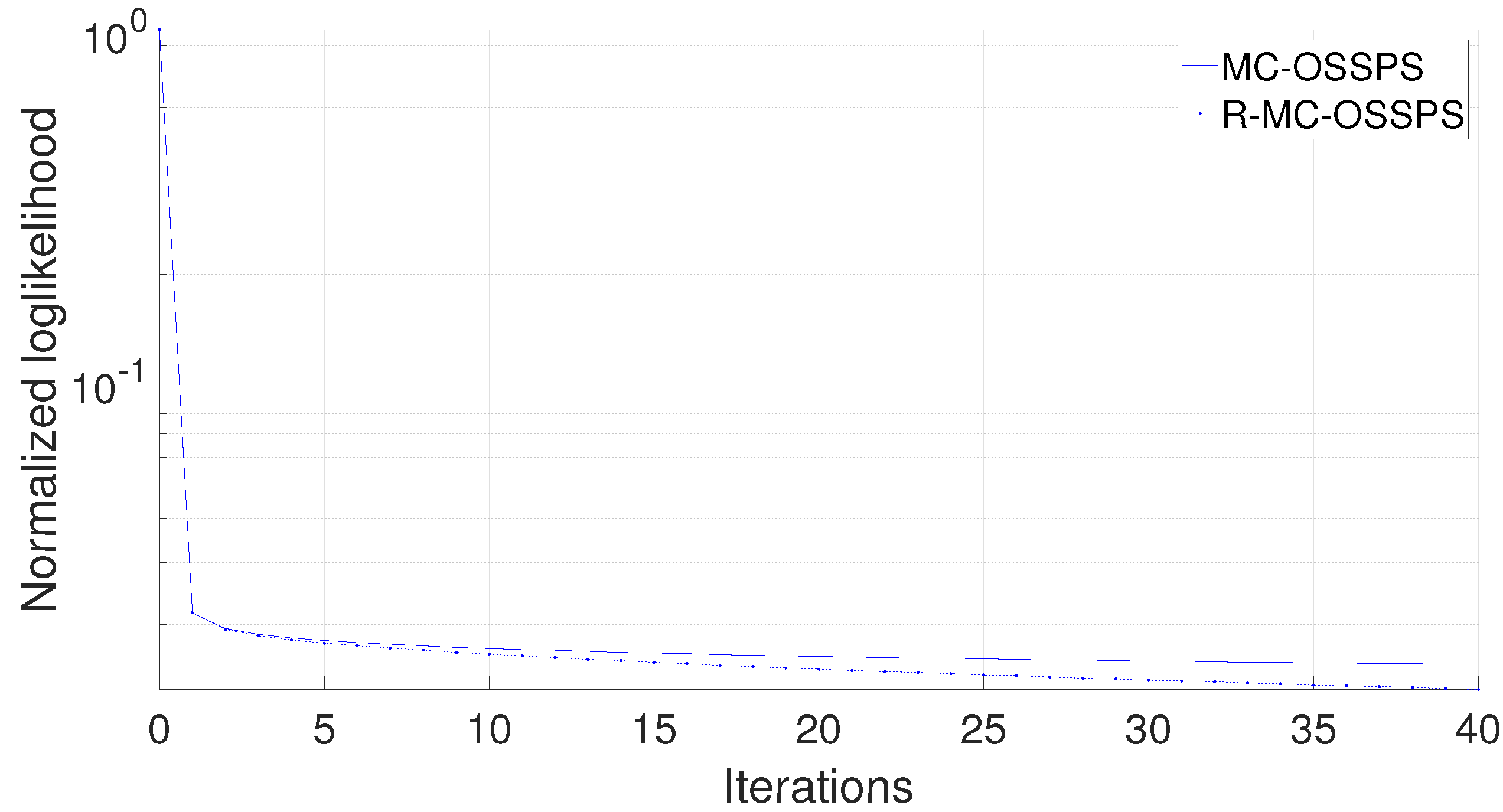
6.2. Comparison of MC-OSSPS and R-MC-OSSPS
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sommer, K.; Saalbach, A.; Brosch, T.; Hall, C.; Cross, N.; Andre, J. Correction of motion artifacts using a multiscale fully convolutional neural network. Am. J. Neuroradiol. 2020, 41, 416–423. [Google Scholar] [CrossRef] [PubMed]
- Papathanassiou, D.; Becker, S.; Amir, R.; Menéroux, B.; Liehn, J.C. Respiratory motion artefact in the liver dome on FDG PET/CT: Comparison of attenuation correction with CT and a caesium external source. Eur. J. Nucl. Med. Mol. Imaging 2005, 32, 1422–1428. [Google Scholar] [CrossRef] [PubMed]
- Vandenberghe, S.; Moskal, P.; Karp, J.S. State of the art in total body PET. EJNMMI Phys. 2020, 7, 1–33. [Google Scholar] [CrossRef] [PubMed]
- Manjeshwar, R.; Tao, X.; Asma, E.; Thielemans, K. Motion compensated image reconstruction of respiratory gated PET/CT. In Proceedings of the 3rd IEEE International Symposium on Biomedical Imaging: Nano to Macro, Arlington, VA, USA, 6–9 April 2006; pp. 674–677. [Google Scholar] [CrossRef]
- Kyme, A.Z.; Fulton, R.R. Motion estimation and correction in SPECT, PET and CT. Phys. Med. Biol. 2021, 66, 18TR02. [Google Scholar] [CrossRef]
- Chen, S.; Fraum, T.J.; Eldeniz, C.; Mhlanga, J.; Gan, W.; Vahle, T.; Krishnamurthy, U.B.; Faul, D.; Gach, H.M.; Binkley, M.M.; et al. MR-assisted PET respiratory motion correction using deep-learning based short-scan motion fields. Magn. Reson. Med. 2022, 88, 676–690. [Google Scholar] [CrossRef]
- Sun, T.; Wu, Y.; Wei, W.; Fu, F.; Meng, N.; Chen, H.; Li, X.; Bai, Y.; Wang, Z.; Ding, J.; et al. Motion correction and its impact on quantification in dynamic total-body 18F-Fluorodeoxyglucose PET. EJNMMI Phys. 2022, 9, 1–16. [Google Scholar] [CrossRef]
- Nehmeh, S.A.; Erdi, Y.E.; Ling, C.C.; Rosenzweig, K.E.; Schoder, H.; Larson, S.M.; Macapinlac, H.A.; Squire, O.D.; Humm, J.L. Effect of respiratory gating on quantifying PET images of lung cancer. J. Nucl. Med. 2002, 43, 876–881. [Google Scholar]
- Thielemans, K.; Mustafovic, S.; Schnorr, L. Image reconstruction of motion corrected sinograms. In Proceedings of the 2003 IEEE Nuclear Science Symposium. Conference Record (IEEE Cat. No.03CH37515), Portland, OR, USA, 19–25 October 2003; Volume 4, pp. 2401–2406. [Google Scholar] [CrossRef]
- Zhou, V.; Kyme, A.; Meikle, S.R.; Fulton, R. Reducing event losses in sinogram-based PET motion correction by extending the axial field of view. In Proceedings of the 2013 IEEE Nuclear Science Symposium and Medical Imaging Conference (2013 NSS/MIC), Seoul, Republic of Korea, 27 October–2 November 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Rahmin, A. Advanced motion correction methods in PET. Iran. J. Nucl. Med. 2005, 13, 24–33. [Google Scholar]
- Dikaios, N.; Fryer, T.D. Registration-weighted motion correction for PET. Med. Phys. 2012, 39, 1253–1264. [Google Scholar] [CrossRef]
- Dikaios, N.; Fryer, T.D. Improved motion-compensated image reconstruction for PET using sensitivity correction per respiratory gate and an approximate tube-of-response backprojector. Med. Phys. 2011, 38, 4958–4970. [Google Scholar] [CrossRef]
- Picard, Y.; Thompson, C.J. Motion correction of PET images using multiple acquisition frames. IEEE Trans. Med. Imaging 1997, 16, 137–144. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dawood, M.; Lang, N.; Jiang, X.; Schafers, K.P. Lung motion correction on respiratory gated 3-D PET/CT images. IEEE Trans. Med. Imaging 2006, 25, 476–485. [Google Scholar] [CrossRef] [PubMed]
- Dawood, M.; Buther, F.; Jiang, X.; Schafers, K.P. Respiratory motion correction in 3-D PET data with advanced optical flow algorithms. IEEE Trans. Med. Imaging 2008, 27, 1164–1175. [Google Scholar] [CrossRef] [PubMed]
- Bai, W.; Brady, M. Regularized B-spline deformable registration for respiratory motion correction in PET images. Phys. Med. Biol. 2009, 54, 2719. [Google Scholar] [CrossRef] [PubMed]
- Jacobson, M.; Fessler, J. Joint estimation of image and deformation parameters in motion-corrected PET. In Proceedings of the 2003 IEEE Nuclear Science Symposium. Conference Record (IEEE Cat. No.03CH37515), Portland, OR, USA, 19–25 October 2003; Volume 5, pp. 3290–3294. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Thorndyke, B.; Schreibmann, E.; Yang, Y.; Xing, L. Model-based image reconstruction for four-dimensional PET. Med. Phys. 2006, 33, 1288–1298. [Google Scholar] [CrossRef] [PubMed]
- Qiao, F.; Pan, T.; Clark, J.W.; Mawlawi, O.R. A motion-incorporated reconstruction method for gated PET studies. Phys. Med. Biol. 2006, 51, 3769. [Google Scholar] [CrossRef]
- Thielemans, K.; Manjeshwar, R.M.; Tao, X.; Asma, E. Lesion detectability in motion compensated image reconstruction of respiratory gated PET/CT. In Proceedings of the 2006 IEEE Nuclear Science Symposium Conference Record, San Diego, CA, USA, 29 October–1 November 2006; Volume 6, pp. 3278–3282. [Google Scholar] [CrossRef]
- Lamare, F.; Carbayo, M.L.; Cresson, T.; Kontaxakis, G.; Santos, A.; Le Rest, C.C.; Reader, A.; Visvikis, D. List-mode-based reconstruction for respiratory motion correction in PET using non-rigid body transformations. Phys. Med. Biol. 2007, 52, 5187. [Google Scholar] [CrossRef]
- Reyes, M.; Malandain, G.; Koulibaly, P.M.; González-Ballester, M.A.; Darcourt, J. Model-based respiratory motion compensation for emission tomography image reconstruction. Phys. Med. Biol. 2007, 52, 3579. [Google Scholar] [CrossRef] [Green Version]
- Dikaios, N.; Fryer, T. Acceleration of motion-compensated PET reconstruction: Ordered subsets-gates EM algorithms and a priori reference gate information. Phys. Med. Biol. 2011, 56, 1695. [Google Scholar] [CrossRef]
- Polycarpou, I.; Soultanidis, G.; Tsoumpas, C. Synergistic motion compensation strategies for positron emission tomography when acquired simultaneously with magnetic resonance imaging. Philos. Trans. R. Soc. 2021, 379, 20200207. [Google Scholar] [CrossRef]
- Guérin, B.; Cho, S.; Chun, S.Y.; Zhu, X.; Alpert, N.; El Fakhri, G.; Reese, T.; Catana, C. Nonrigid PET motion compensation in the lower abdomen using simultaneous tagged-MRI and PET imaging. Med. Phys. 2011, 38, 3025–3038. [Google Scholar] [CrossRef] [PubMed]
- Manber, R.; Thielemans, K.; Hutton, B.F.; Barnes, A.; Ourselin, S.; Arridge, S.; O’Meara, C.; Wan, S.; Atkinson, D. Practical PET respiratory motion correction in clinical PET/MR. J. Nucl. Med. 2015, 56, 890–896. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ippoliti, M.; Lukas, M.; Brenner, W.; Schatka, I.; Furth, C.; Schaeffter, T.; Makowski, M.R.; Kolbitsch, C. Respiratory motion correction for enhanced quantification of hepatic lesions in simultaneous PET and DCE-MR imaging. Phys. Med. Biol. 2021, 66, 095012. [Google Scholar] [CrossRef] [PubMed]
- Petibon, Y.; Huang, C.; Ouyang, J.; Reese, T.G.; Li, Q.; Syrkina, A.; Chen, Y.L.; El Fakhri, G. Relative role of motion and PSF compensation in whole-body oncologic PET-MR imaging. Med. Phys. 2014, 41, 042503. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Ackerman, J.L.; Petibon, Y.; Normandin, M.D.; Brady, T.J.; El Fakhri, G.; Ouyang, J. Motion compensation for brain PET imaging using wireless MR active markers in simultaneous PET–MR: Phantom and non-human primate studies. NeuroImage 2014, 91, 129–137. [Google Scholar] [CrossRef] [Green Version]
- Guo, X.; Zhou, B.; Pigg, D.; Spottiswoode, B.; Casey, M.E.; Liu, C.; Dvornek, N.C. Unsupervised inter-frame motion correction for whole-body dynamic PET using convolutional long short-term memory in a convolutional neural network. Med. Image Anal. 2022, 80, 102524. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.; Tsai, Y.J.; Chen, X.; Duncan, J.S.; Liu, C. MDPET: A unified motion correction and denoising adversarial network for low-dose gated PET. IEEE Trans. Med. Imaging 2021, 40, 3154–3164. [Google Scholar] [CrossRef]
- Lamare, F.; Bousse, A.; Thielemans, K.; Liu, C.; Merlin, T.; Fayad, H.; Visvikis, D. PET respiratory motion correction: Quo vadis? Phys. Med. Biol. 2022, 67, 03TR02. [Google Scholar] [CrossRef]
- Hudson, H.M.; Larkin, R.S. Accelerated image reconstruction using ordered subsets of projection data. IEEE Trans. Med. Imaging 1994, 13, 601–609. [Google Scholar] [CrossRef] [Green Version]
- Green, P.J. Bayesian reconstructions from emission tomography data using a modified EM algorithm. IEEE Trans. Med. Imaging 1990, 9, 84–93. [Google Scholar] [CrossRef] [Green Version]
- Fessler, J.A.; Hero, A.O. Penalized maximum-likelihood image reconstruction using space-alternating generalized EM algorithms. IEEE Trans. Med. Imaging 1995, 4, 1417–1429. [Google Scholar] [CrossRef] [PubMed]
- Fessler, J.; Erdogan, H. A paraboloidal surrogates algorithm for convergent penalized-likelihood emission image reconstruction. In Proceedings of the 1998 IEEE Nuclear Science Symposium Conference Record. 1998 IEEE Nuclear Science Symposium and Medical Imaging Conference (Cat. No.98CH36255), Toronto, ON, Canada, 8–14 November 1998; Volume 2, pp. 1132–1135. [Google Scholar] [CrossRef] [Green Version]
- Dikaios, N. Respiratory Motion Correction for Positron Emission Tomography. Ph.D. Thesis, Wolfson College, University of Cambridge, Cambridge, UK, 2011. [Google Scholar]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. Ser. B Methodol. 1977, 39, 1–22. [Google Scholar] [CrossRef]
- Shepp, L.A.; Vardi, Y. Maximum likelihood reconstruction for emission tomography. IEEE Trans. Med. Imaging 1982, 1, 113–122. [Google Scholar] [CrossRef]
- Lange, K.; Carson, R. EM reconstruction algorithms for emission and transmission tomography. J. Comput. Assist. Tomogr. 1984, 8, 306–316. [Google Scholar] [PubMed]
- Moskal, P.; Zoń, N.; Bednarski, T.; Białas, P.; Czerwiński, E.; Gajos, A.; Kamińska, D.; Kochanowski, A.; Korcyl, G.; Kowal, J.; et al. A novel method for the line-of-response and time-of-flight reconstruction in TOF-PET detectors based on a library of synchronized model signals. Nucl. Instrum. Methods. Phys. Res. B 2015, 775, 54–62. [Google Scholar] [CrossRef] [Green Version]
- Lin, H.; Guo, X.; Jing, J.; Mao, X.; Yang, Y.; Hu, M. An automatic method to generate voxel-based absorbed doses from radioactivity distributions for nuclear medicine using generative adversarial networks: A feasibility study. Phys. Eng. Sci. Med. 2022, 45, 971–980. [Google Scholar] [CrossRef]
- Browne, J.; De Pierro, A. A row-action alternative to the EM algorithm for maximizing likelihood in emission tomography. IEEE Trans. Med. Imaging 1996, 15, 687–699. [Google Scholar] [CrossRef]
- Erdogan, H.; Fessler, J. Monotonic algorithms for transmission tomography. In Proceedings of the 5th IEEE EMBS International Summer School on Biomedical Imaging, Berder Island, France, 15–23 June 2002; p. 14. [Google Scholar] [CrossRef] [Green Version]
- Erdogan, H.; Fessler, J.A. Ordered subsets algorithms for transmission tomography. Phys. Med. Biol. 1999, 44, 2835. [Google Scholar] [CrossRef]
- Ahn, S.; Fessler, J.A. Globally convergent image reconstruction for emission tomography using relaxed ordered subsets algorithms. IEEE Trans. Med. Imaging 2003, 22, 613–626. [Google Scholar] [CrossRef] [Green Version]
- Segars, W.P.; Lalush, D.S.; Tsui, B.M. Modeling respiratory mechanics in the MCAT and spline-based MCAT phantoms. IEEE Trans. Med. Imaging 2001, 48, 89–97. [Google Scholar] [CrossRef]
- Ibanez, L.; Schroeder, W.; Ng, L.; Cates, J. The ITK Software Guide: The Insight Segmentation and Registration Toolkit; Kitware, Inc.: New York, NY, USA, 2005. [Google Scholar]
- Thielemans, K.; Tsoumpas, C.; Mustafovic, S.; Beisel, T.; Aguiar, P.; Dikaios, N.; Jacobson, M.W. STIR: Software for tomographic image reconstruction release 2. Phys. Med. Biol. 2012, 57, 867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kennedy, J.A.; Israel, O.; Frenkel, A.; Bar-Shalom, R.; Azhari, H. Super-resolution in PET imaging. IEEE Trans. Med. Imaging 2006, 25, 137–147. [Google Scholar] [CrossRef] [PubMed]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Protonotarios, N.E.; Kastis, G.A.; Fotopoulos, A.D.; Tzakos, A.G.; Vlachos, D.; Dikaios, N. Motion-Compensated PET Image Reconstruction via Separable Parabolic Surrogates. Mathematics 2023, 11, 55. https://doi.org/10.3390/math11010055
Protonotarios NE, Kastis GA, Fotopoulos AD, Tzakos AG, Vlachos D, Dikaios N. Motion-Compensated PET Image Reconstruction via Separable Parabolic Surrogates. Mathematics. 2023; 11(1):55. https://doi.org/10.3390/math11010055
Chicago/Turabian StyleProtonotarios, Nicholas E., George A. Kastis, Andreas D. Fotopoulos, Andreas G. Tzakos, Dimitrios Vlachos, and Nikolaos Dikaios. 2023. "Motion-Compensated PET Image Reconstruction via Separable Parabolic Surrogates" Mathematics 11, no. 1: 55. https://doi.org/10.3390/math11010055