


Constrained Nonsingular Terminal Sliding Mode Attitude Control for Spacecraft: A Funnel Control Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Inspired by the FC approach, a novel attitude control is introduced which contains a time-varying gain to handle the constraints imposed on the spacecraft attitude.
- An adaptive mechanism based on neural network is proposed to cope with the total uncertainty. It is analytically guaranteed that the system trajectories only need a finite time to converge to the origin and this time is explicitly specified a priori by assigning an independent parameter in the controller. This, in turn, highly simplifies the procedure of determining the convergence time.
2. Problem Formulation and Preliminaries
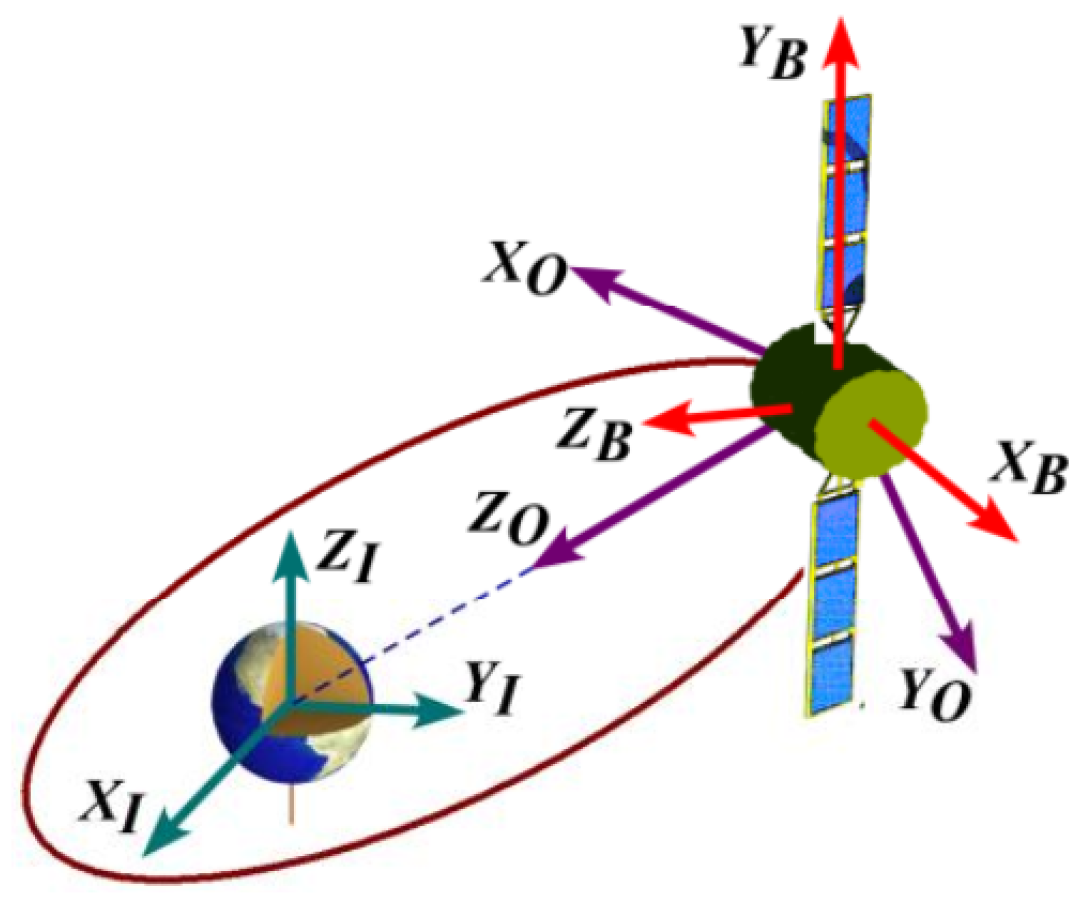
2.1. Equations of Motion of Rigid Spacecraft Attitude System
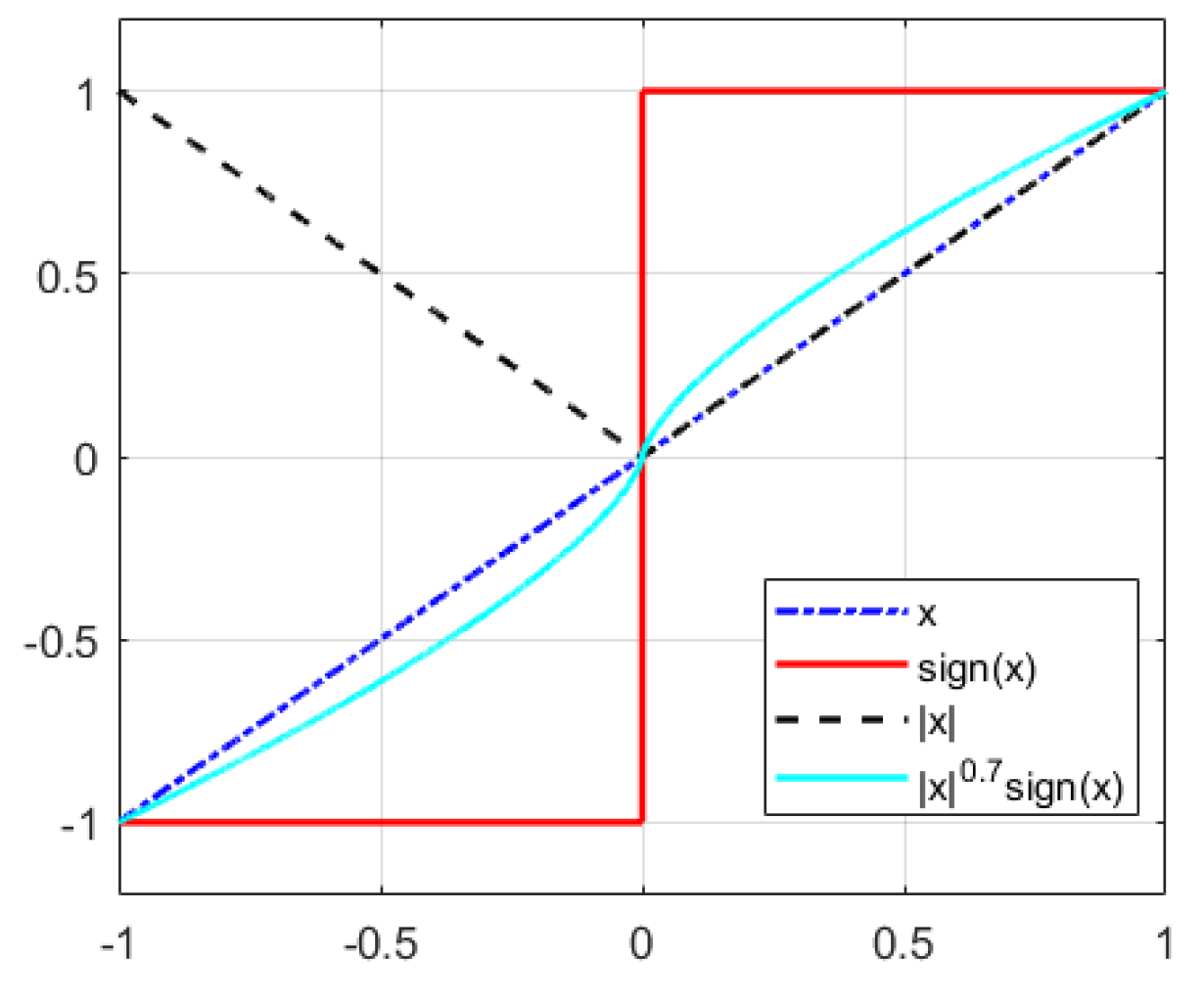
2.2. Preliminaries
2.3. Control Objective
- The closed-loop attitude system is practically fixed-time stable.
3. Nonsingular Constrained Switching Function Development
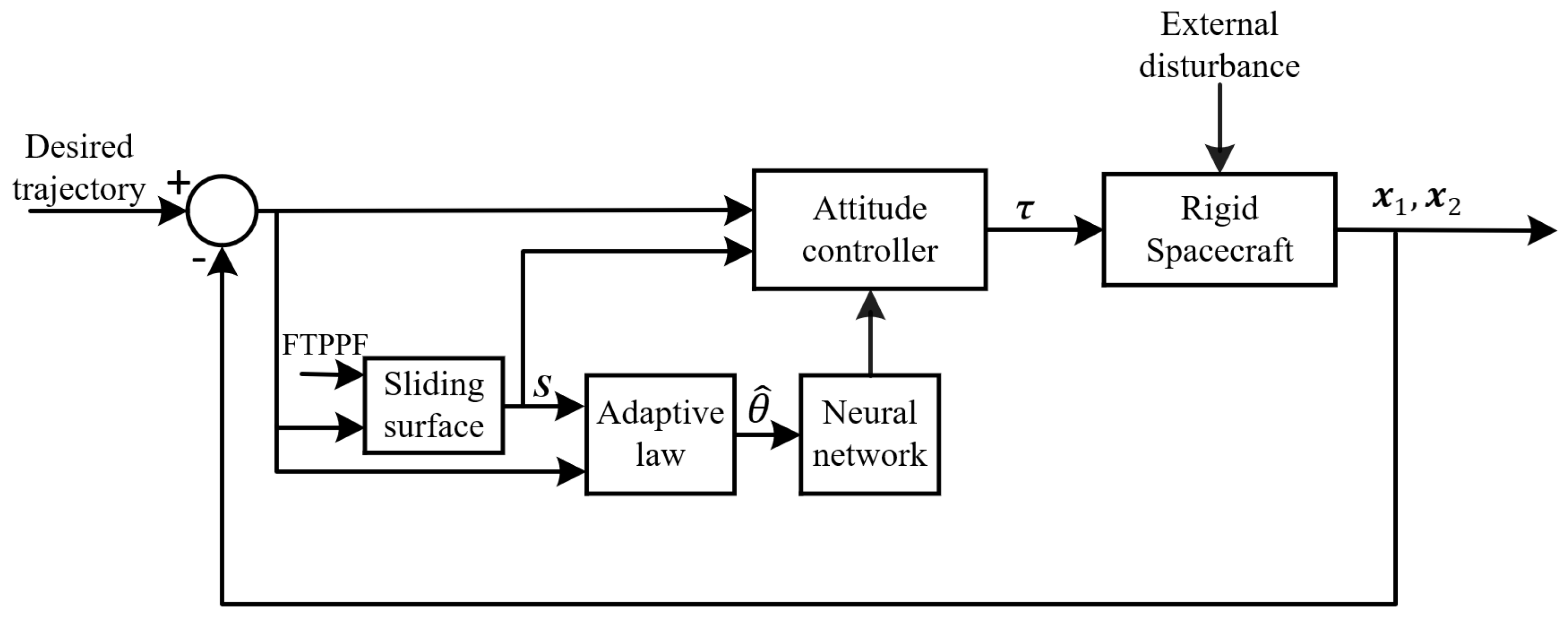
4. Adaptive Fixed-Time Attitude Control Development
- The fractional powers and have significant effect on the convergence behavior. If they are selected too small, the faster and more accurate convergence will be obtained; however, the control input increases.
- The parameters and represent the settling time. Hence, smaller and result in a faster convergence. Nonetheless, the needed control input will go up.
- The parameter α contributes to the convergence rate and control input. Indeed, if it is selected large enough, the system states are quickly stabilized at a price of large control input.
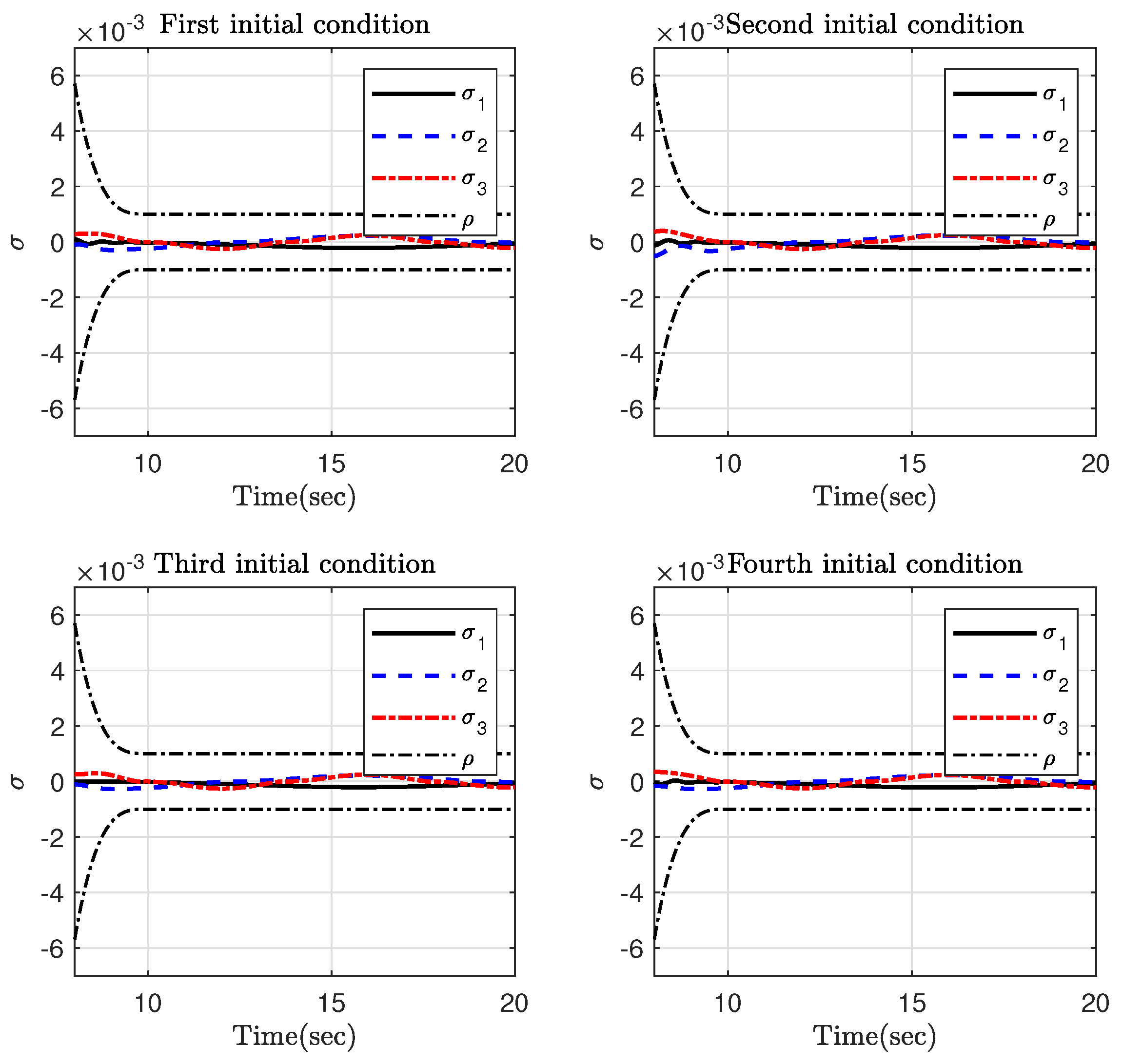
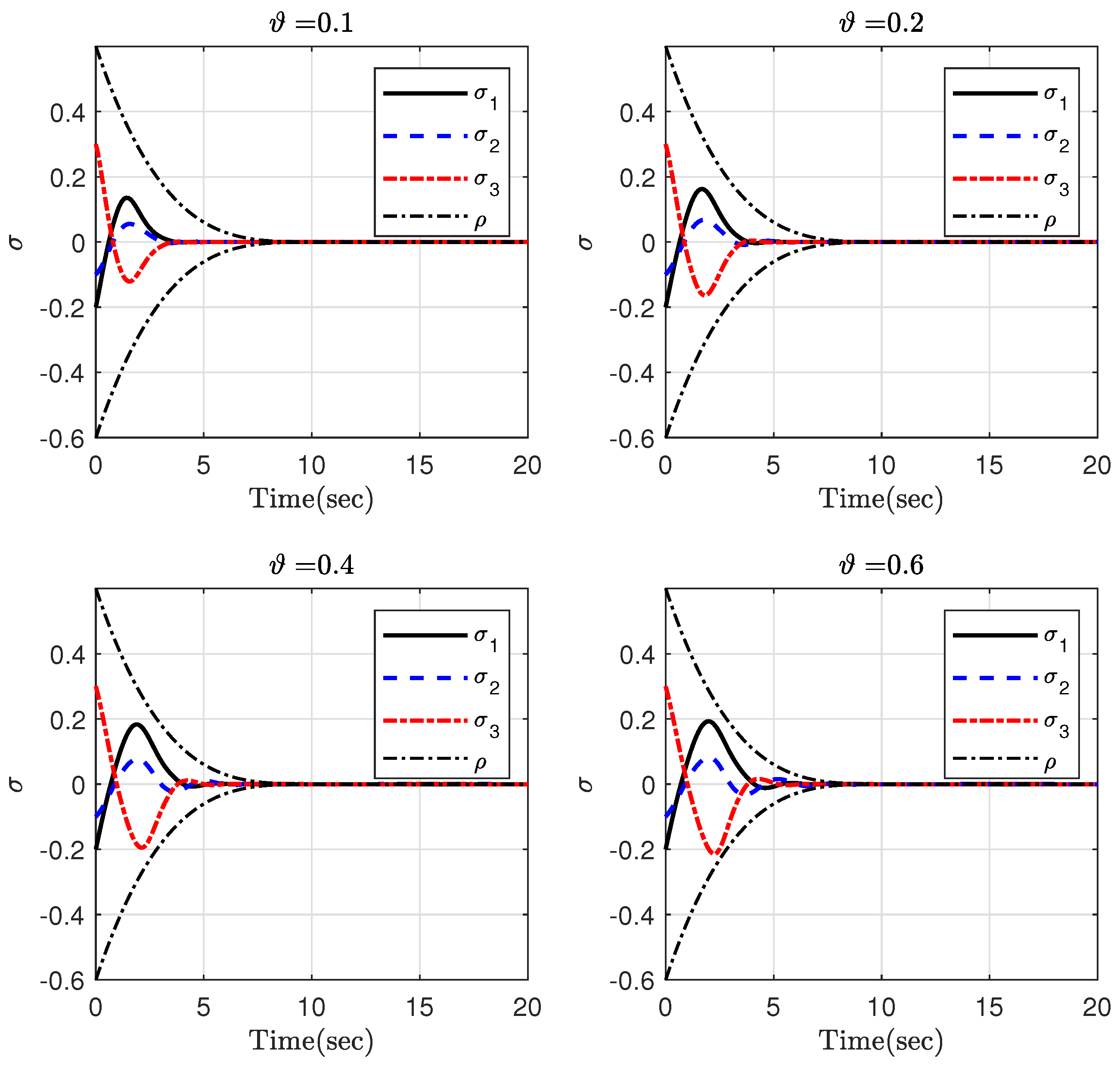
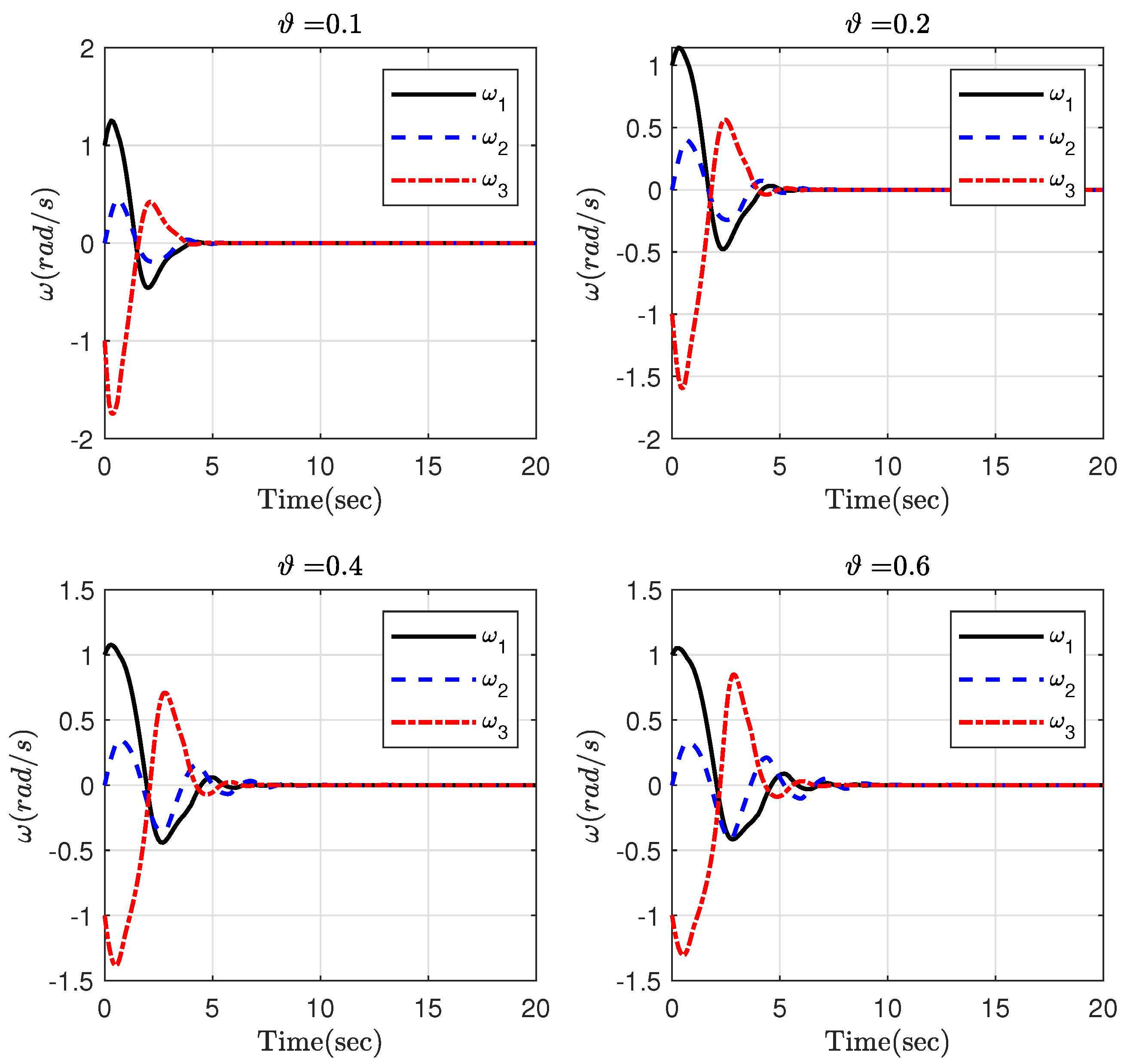
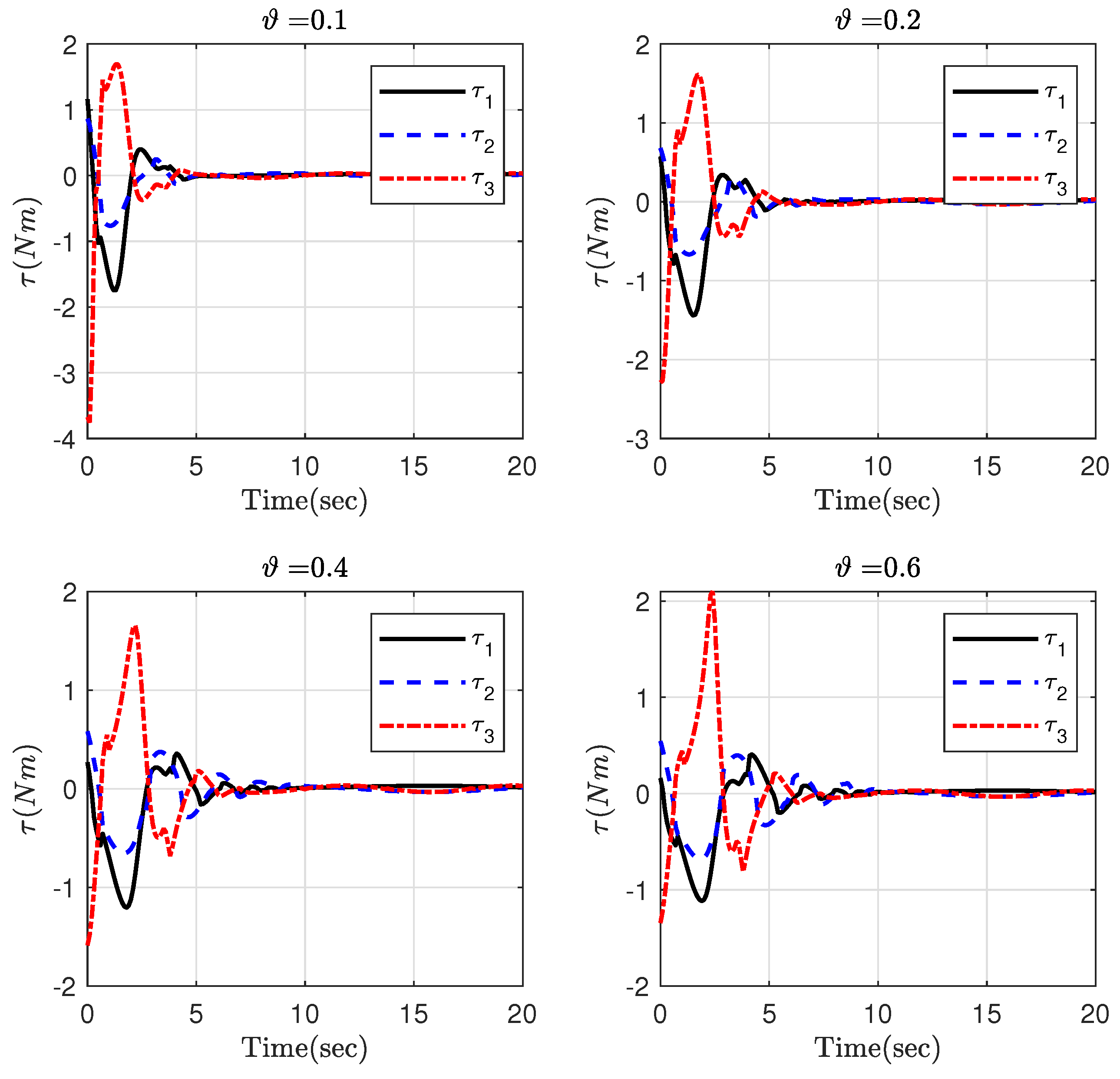
- Since , then a larger value of ϑ means that the attitude trajectory is allowed to approach the performance function boundary.
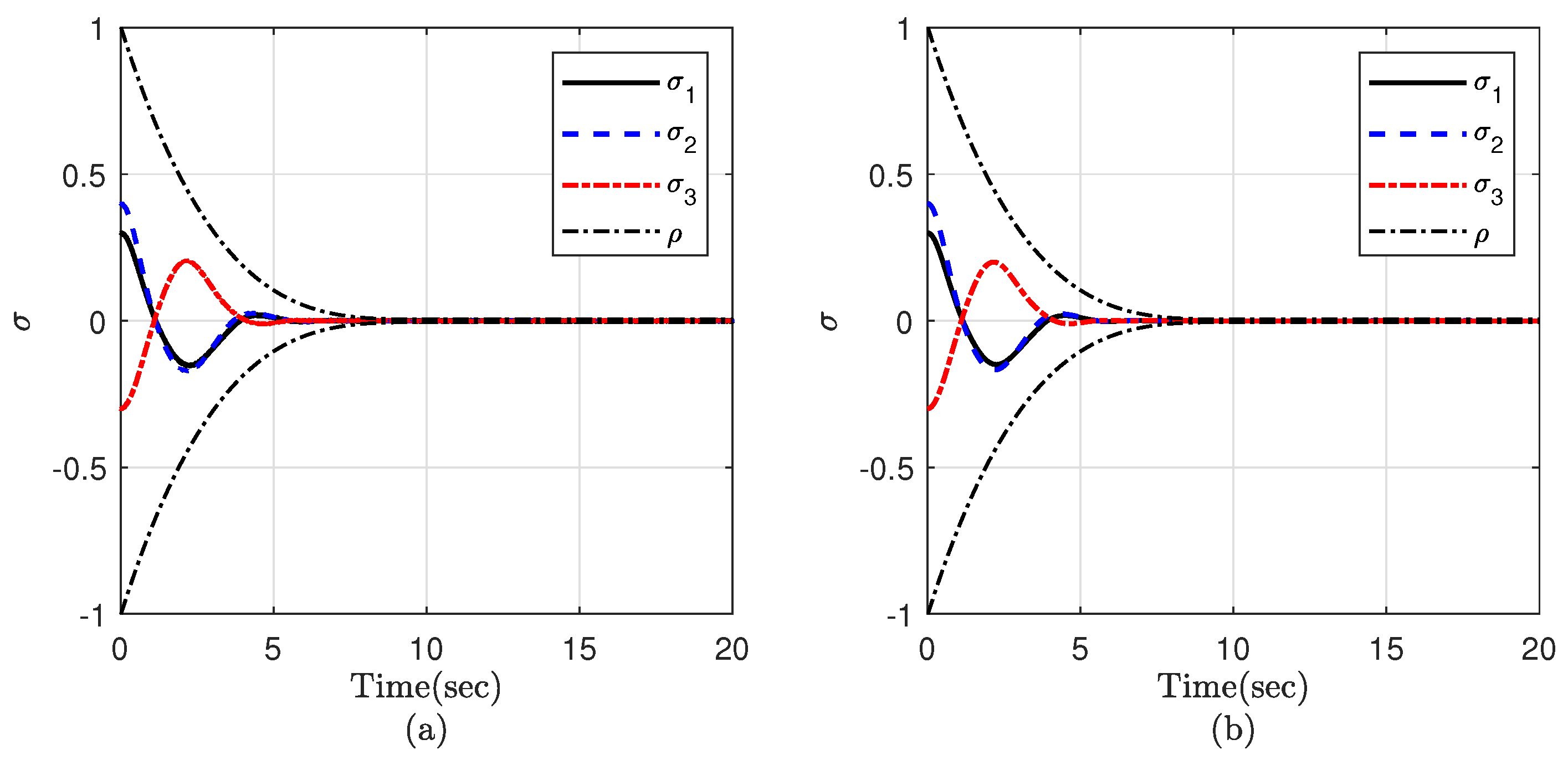
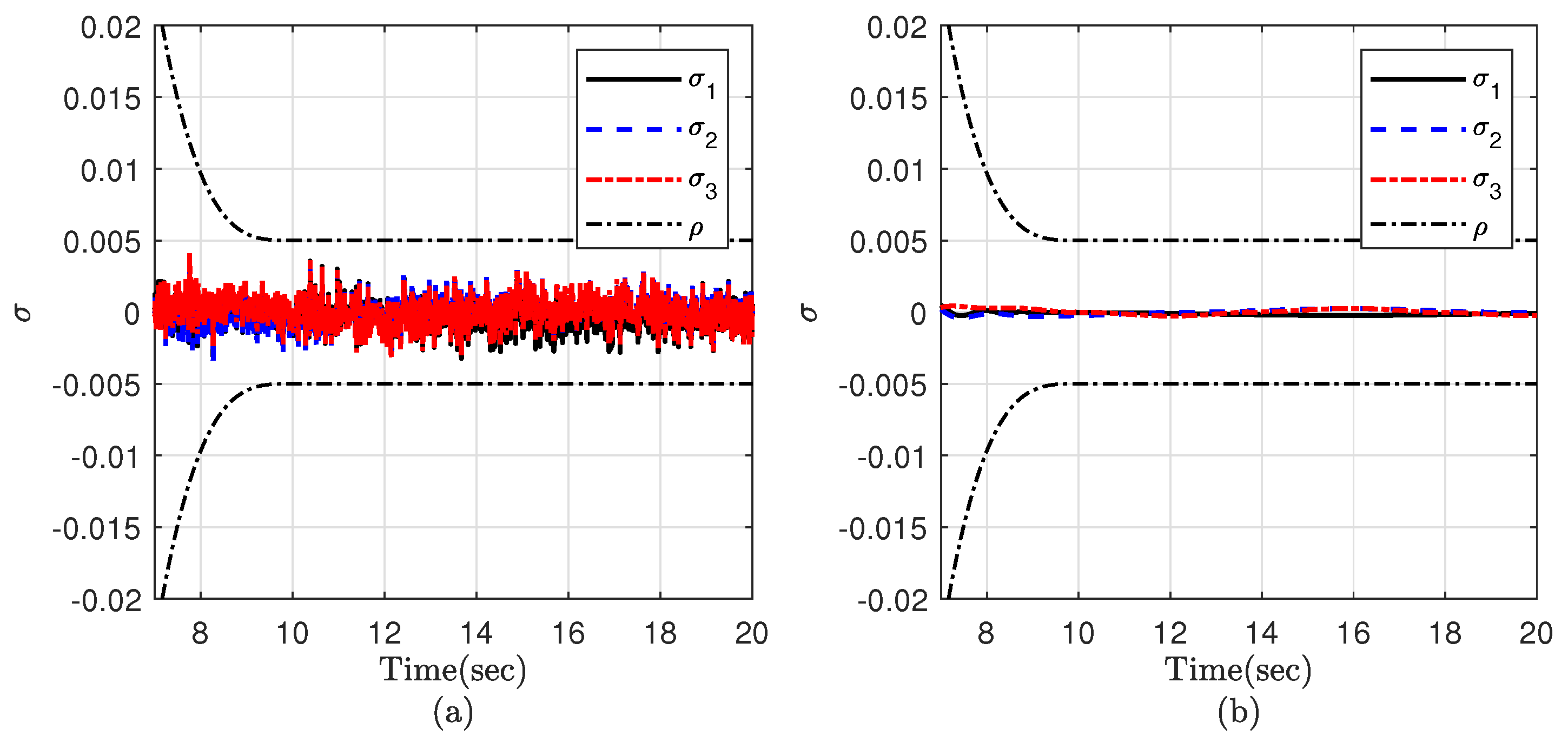
- The parameters of the performance function are selected based on the maximum permitted overshoot, the convergence time, and the ultimate attitude value.
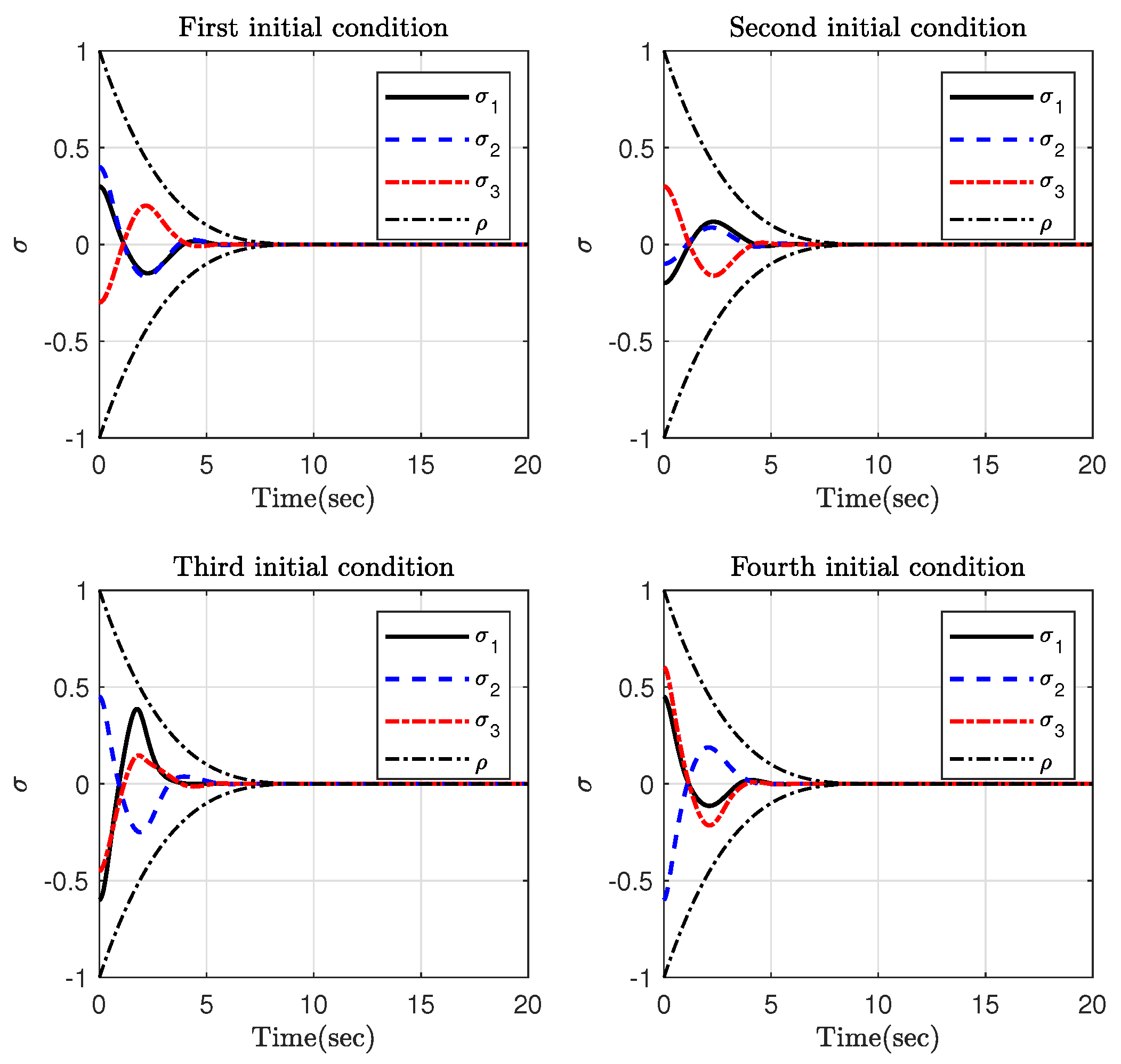
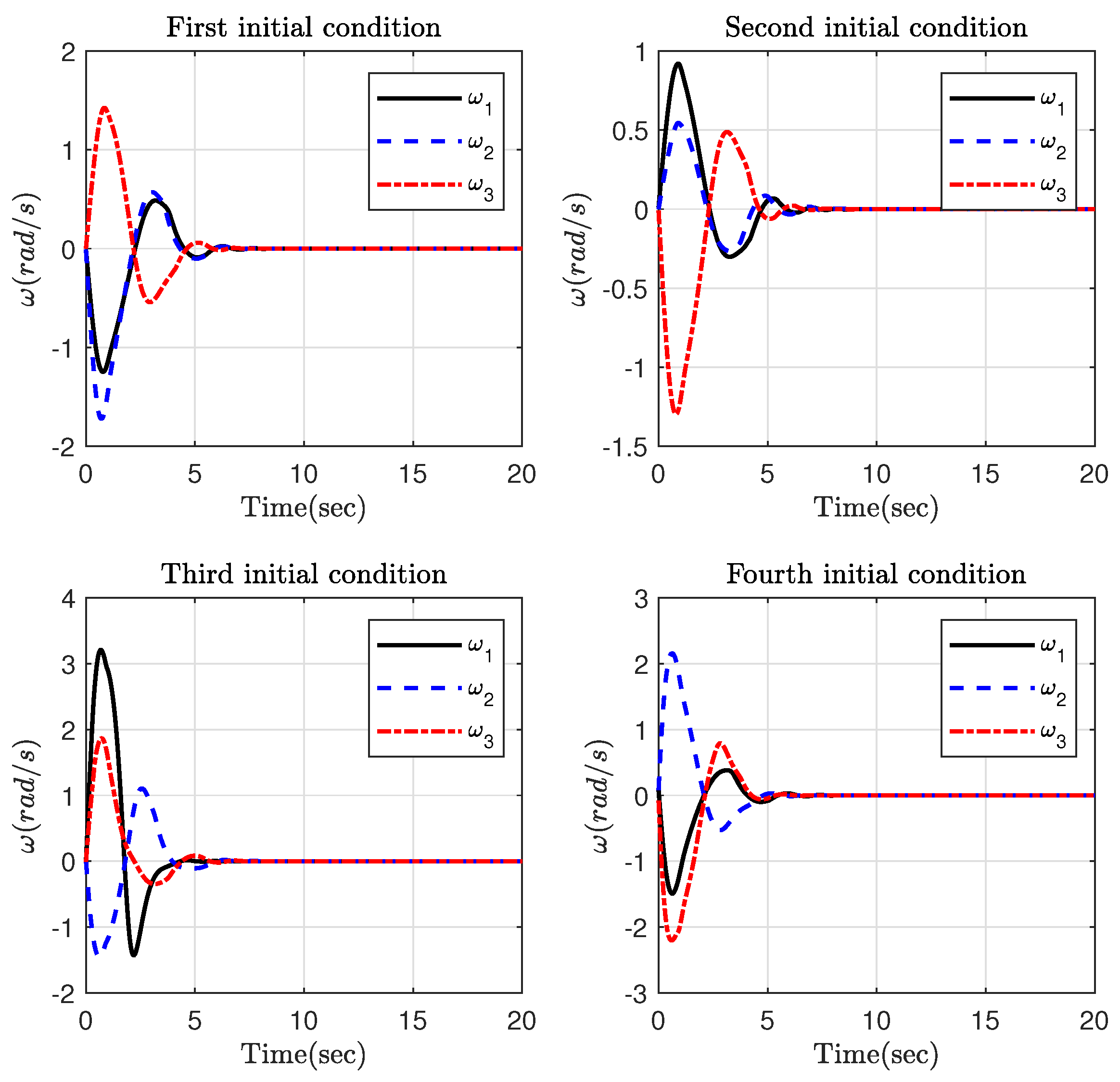
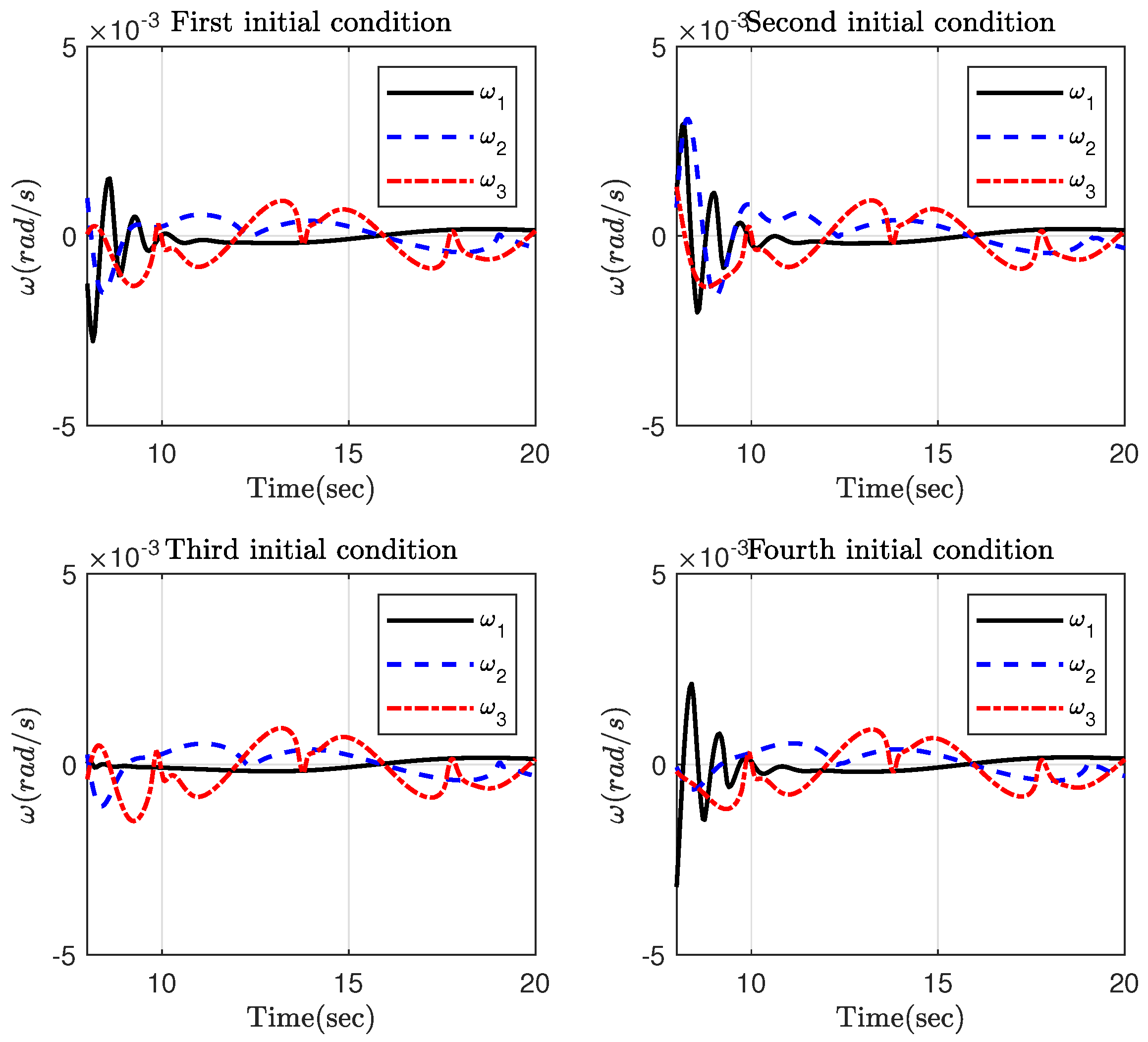
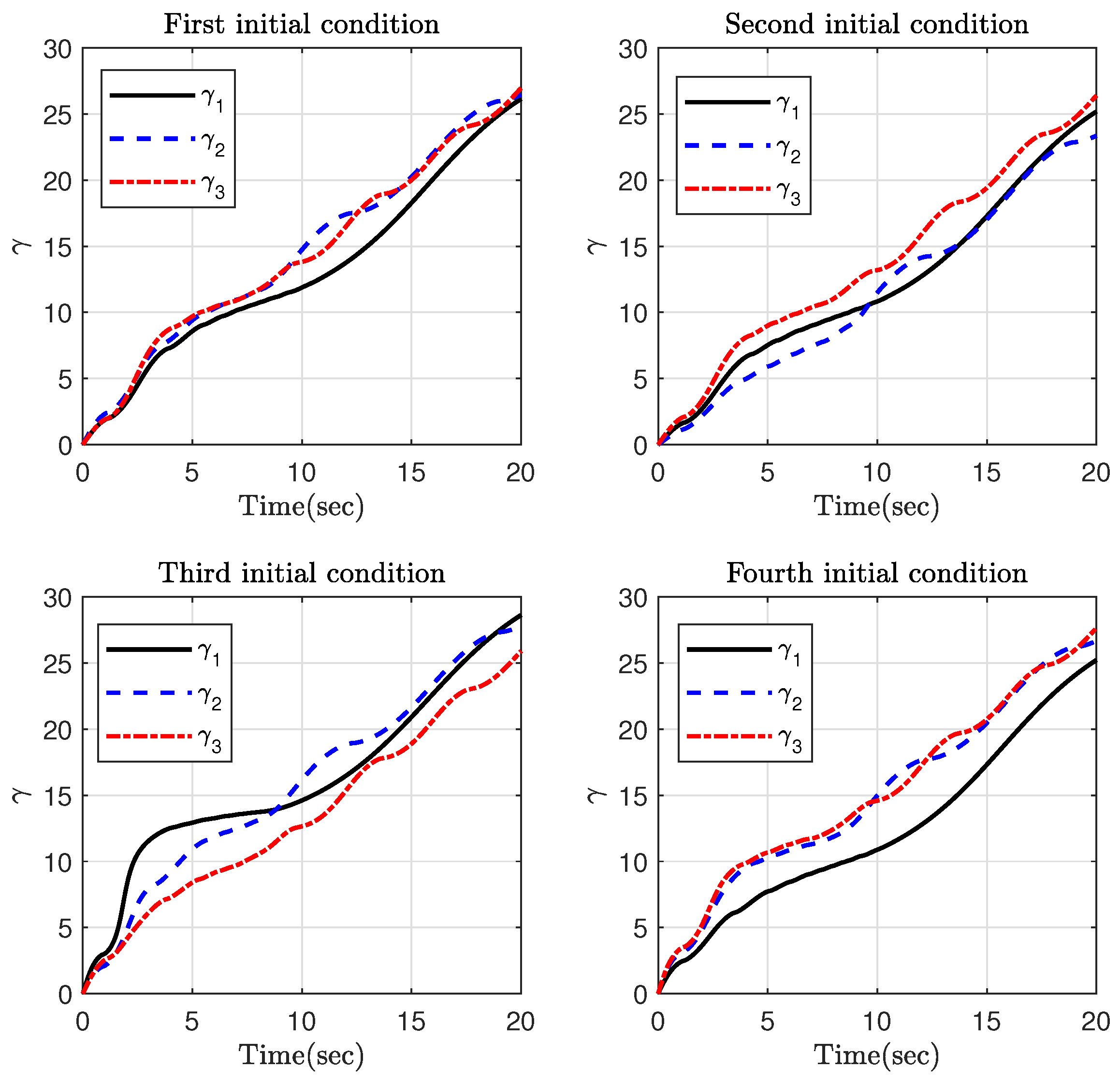
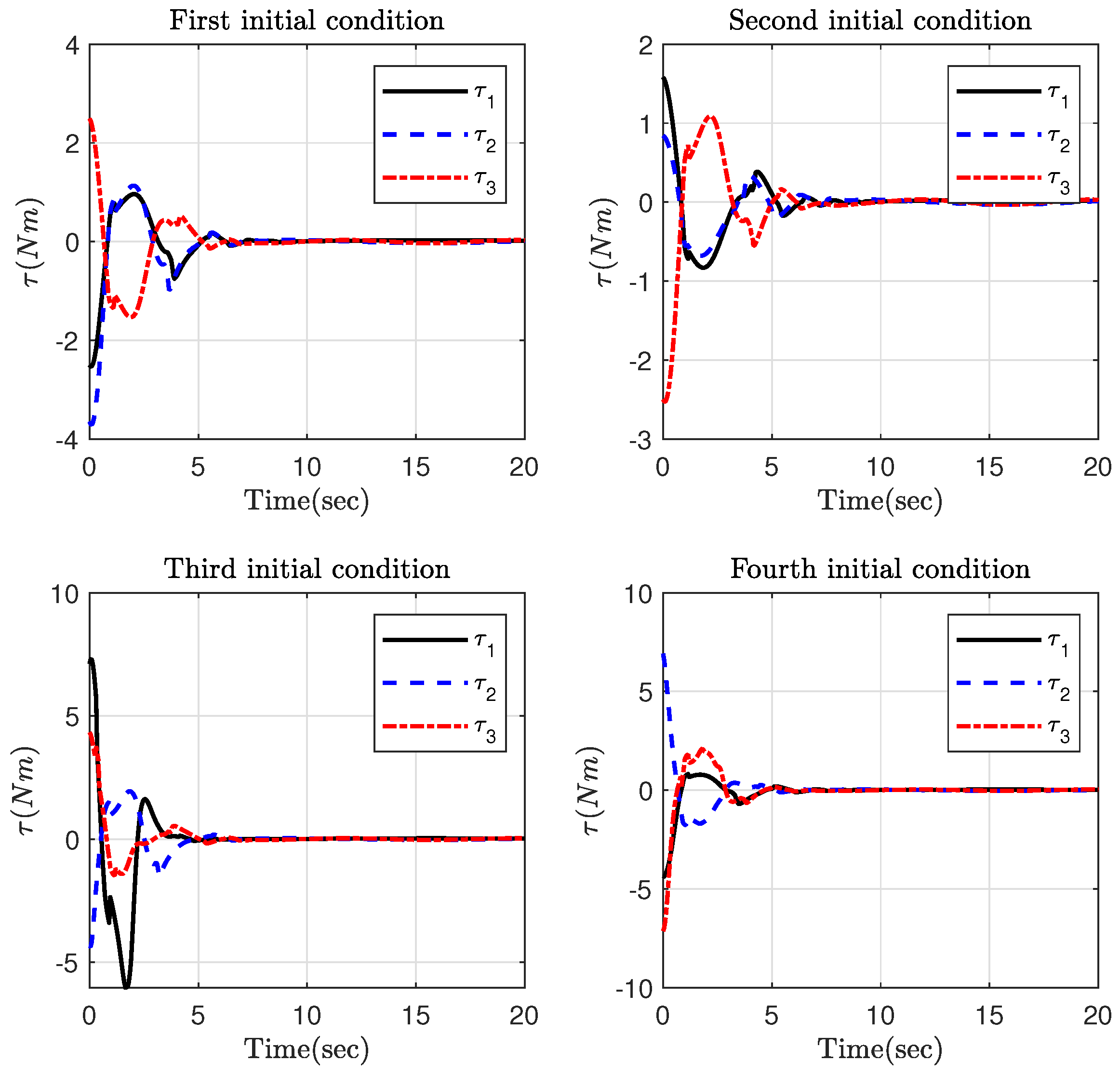
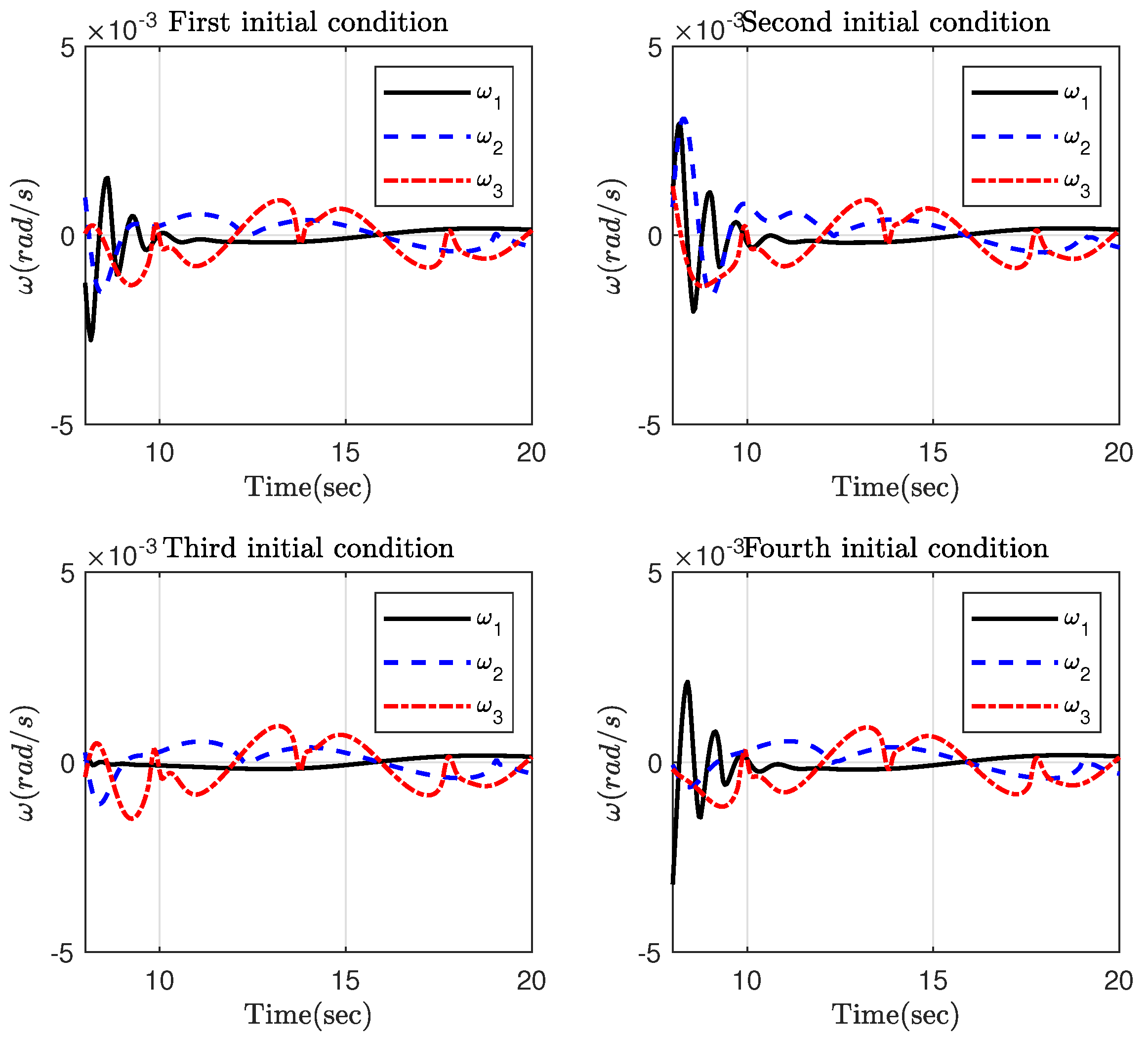
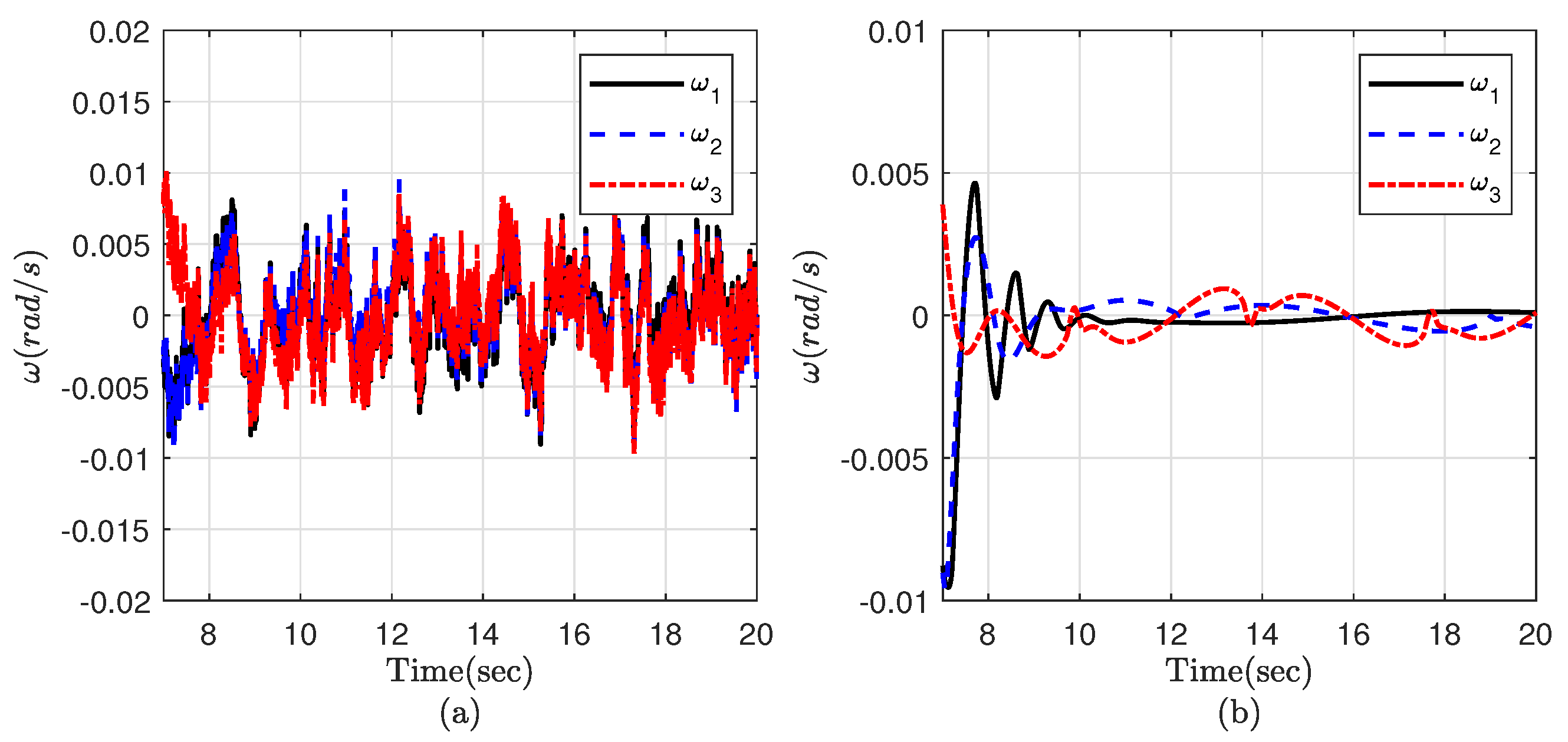
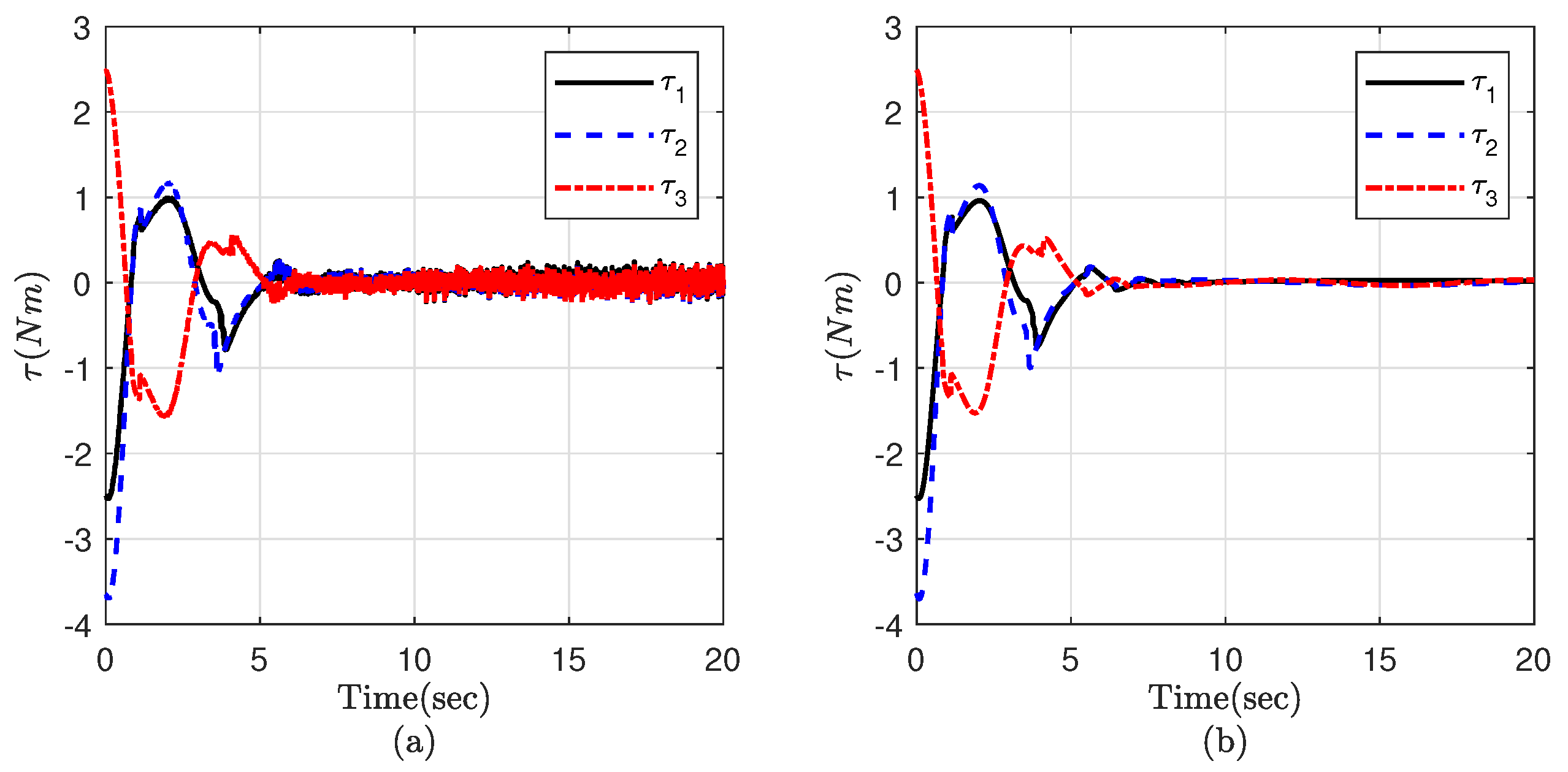
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, M.; Wu, Y.; Li, C. Reinforcement learning strategy for spacecraft attitude hyperagile tracking control with uncertainties. Aerosp. Sci. Technol. 2021, 119, 107126. [Google Scholar] [CrossRef]
- Yao, Q.; Jahanshahi, H.; Bekiros, S.; Mihalache, S.F.; Alotaibi, N.D. Indirect Neural-Enhanced Integral Sliding Mode Control for Finite-Time Fault-Tolerant Attitude Tracking of Spacecraft. Mathematics 2022, 10, 2467. [Google Scholar] [CrossRef]
- Dai, M.Z.; Xiao, B.; Zhang, C.; Wu, J. Event-triggered policy to spacecraft attitude stabilization with actuator output nonlinearities. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2855–2859. [Google Scholar] [CrossRef]
- Yao, Q. Robust attitude tracking control of spacecraft under unified actuator dynamics. Int. J. Control 2022. [Google Scholar] [CrossRef]
- Show, L.L.; Juang, J.C.; Lin, C.T.; Jan, Y.W. Spacecraft robust attitude tracking design: PID control approach. In Proceedings of the 2002 American Control Conference (IEEE Cat. No. CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 2, pp. 1360–1365. [Google Scholar]
- Najafizadeh Sari, N.; Jahanshahi, H.; Fakoor, M. Adaptive fuzzy PID control strategy for spacecraft attitude control. Int. J. Fuzzy Syst. 2019, 21, 769–781. [Google Scholar] [CrossRef]
- Guo, Z.; Wang, Z.; Li, S. Global finite-time set stabilization of spacecraft attitude with disturbances using second-order sliding mode control. Nonlinear Dyn. 2022, 108, 1305–1318. [Google Scholar] [CrossRef]
- Xia, Y.; Zhu, Z.; Fu, M.; Wang, S. Attitude tracking of rigid spacecraft with bounded disturbances. IEEE Trans. Ind. Electron. 2010, 58, 647–659. [Google Scholar] [CrossRef]
- Sun, L.; Zheng, Z. Disturbance-observer-based robust backstepping attitude stabilization of spacecraft under input saturation and measurement uncertainty. IEEE Trans. Ind. Electron. 2017, 64, 7994–8002. [Google Scholar] [CrossRef]
- Giuseppi, A.; Pietrabissa, A.; Cilione, S.; Galvagni, L. Feedback linearization-based satellite attitude control with a life-support device without communications. Control Eng. Pract. 2019, 90, 221–230. [Google Scholar] [CrossRef]
- Seo, D.; Akella, M.R. High-performance spacecraft adaptive attitude-tracking control through attracting-manifold design. J. Guid. Control Dyn. 2008, 31, 884–891. [Google Scholar] [CrossRef]
- Zhang, C.; Xiao, B.; Wu, J.; Li, B. On low-complexity control design to spacecraft attitude stabilization: An online-learning approach. Aerosp. Sci. Technol. 2021, 110, 106441. [Google Scholar] [CrossRef]
- Lee, D. Fault-tolerant finite-time controller for attitude tracking of rigid spacecraft using intermediate quaternion. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 540–553. [Google Scholar] [CrossRef]
- Huang, Y.; Jia, Y. Adaptive finite-time 6-DOF tracking control for spacecraft fly around with input saturation and state constraints. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3259–3272. [Google Scholar] [CrossRef]
- Lv, M.; Li, Y.; Pan, W.; Baldi, S. Finite-time fuzzy adaptive constrained tracking control for hypersonic flight vehicles with singularity-free switching. IEEE/ASME Trans. Mechatron. 2022, 27, 1594–1605. [Google Scholar] [CrossRef]
- Yu, L.; Ye, D.; Sun, Z. Finite-time resilient attitude coordination control for multiple rigid spacecraft with communication link faults. Aerosp. Sci. Technol. 2021, 111, 106560. [Google Scholar] [CrossRef]
- Najafi, A.; Vu, M.T.; Mobayen, S.; Asad, J.H.; Fekih, A. Adaptive barrier fast terminal sliding mode actuator fault tolerant control approach for quadrotor UAVs. Mathematics 2022, 10, 3009. [Google Scholar] [CrossRef]
- Saghafi Zanjani, M.; Mobayen, S. Anti-sway control of offshore crane on surface vessel using global sliding mode control. Int. J. Control 2022, 95, 2267–2278. [Google Scholar] [CrossRef]
- Mobayen, S.; Bayat, F.; ud Din, S.; Vu, M.T. Barrier function-based adaptive nonsingular terminal sliding mode control technique for a class of disturbed nonlinear systems. ISA Trans. 2022. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2011, 57, 2106–2110. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Wu, B.; Wang, D.; Zhang, Y. Distributed fixed-time output-feedback attitude consensus control for multiple spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4779–4795. [Google Scholar] [CrossRef]
- Aly, A.A.; The Vu, M.; El-Sousy, F.F.; Alotaibi, A.; Mousa, G.; Le, D.N.; Mobayen, S. Fuzzy-Based Fixed-Time Nonsingular Tracker of Exoskeleton Robots for Disabilities Using Sliding Mode State Observer. Mathematics 2022, 10, 3147. [Google Scholar] [CrossRef]
- Du, H.; Zhang, J.; Wu, D.; Zhu, W.; Li, H.; Chu, Z. Fixed-time attitude stabilization for a rigid spacecraft. ISA Trans. 2020, 98, 263–270. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Xie, S.; Sun, M.; He, X. Adaptive nonsingular fixed-time attitude stabilization of uncertain spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2937–2950. [Google Scholar] [CrossRef]
- Zou, A.M.; Fan, Z. Distributed fixed-time attitude coordination control for multiple rigid spacecraft. Int. J. Robust Nonlinear Control 2020, 30, 266–281. [Google Scholar] [CrossRef]
- Tao, M.; Chen, Q.; He, X.; Sun, M. Adaptive fixed-time fault-tolerant control for rigid spacecraft using a double power reaching law. Int. J. Robust Nonlinear Control 2019, 29, 4022–4040. [Google Scholar] [CrossRef]
- Xiao, B.; Wu, X.; Cao, L.; Hu, X. Prescribed Time Attitude Tracking Control of Spacecraft with Arbitrary Disturbance. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2531–2540. [Google Scholar] [CrossRef]
- Cao, L.; Xiao, B.; Golestani, M. Robust fixed-time attitude stabilization control of flexible spacecraft with actuator uncertainty. Nonlinear Dyn. 2020, 100, 2505–2519. [Google Scholar] [CrossRef]
- Cao, L.; Xiao, B.; Golestani, M.; Ran, D. Faster fixed-time control of flexible spacecraft attitude stabilization. IEEE Trans. Ind. Inform. 2020, 16, 1281–1290. [Google Scholar] [CrossRef]
- Zuo, Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Chen, Q.; Xie, S.; He, X. Neural-network-based adaptive singularity-free fixed-time attitude tracking control for spacecrafts. IEEE Trans. Cybern. 2021, 51, 5032–5045. [Google Scholar] [CrossRef]
- Yao, Q.; Jahanshahi, H.; Moroz, I.; Alotaibi, N.D.; Bekiros, S. Neural Adaptive Fixed-Time Attitude Stabilization and Vibration Suppression of Flexible Spacecraft. Mathematics 2022, 10, 1667. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Berger, T.; Lê, H.H.; Reis, T. Funnel control for nonlinear systems with known strict relative degree. Automatica 2018, 87, 345–357. [Google Scholar] [CrossRef]
- Wei, C.; Chen, Q.; Liu, J.; Yin, Z.; Luo, J. An overview of prescribed performance control and its application to spacecraft attitude system. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 435–447. [Google Scholar] [CrossRef]
- Golestani, M.; Zhang, W.; Yang, Y.; Xuan-Mung, N. Disturbance observer-based constrained attitude control for flexible spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2022. [Google Scholar] [CrossRef]
- Wei, C.; Luo, J.; Dai, H.; Duan, G. Learning-based adaptive attitude control of spacecraft formation with guaranteed prescribed performance. IEEE Trans. Cybern. 2018, 49, 4004–4016. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G.M. Finite-time prescribed performance control for spacecraft attitude tracking. IEEE/ASME Trans. Mechatron. 2022, 27, 3087–3098. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G.M. A novel finite-time prescribed performance control scheme for spacecraft attitude tracking. Aerosp. Sci. Technol. 2021, 118, 107044. [Google Scholar] [CrossRef]
- Fu, J.; Liu, M.; Cao, X.; Li, A. Robust neural-network-based quasi-sliding-mode control for spacecraft-attitude maneuvering with prescribed performance. Aerosp. Sci. Technol. 2021, 112, 106667. [Google Scholar] [CrossRef]
- Munoz-Vazquez, A.J.; Sánchez-Torres, J.D.; Jimenez-Rodriguez, E.; Loukianov, A.G. Predefined-time robust stabilization of robotic manipulators. IEEE/ASME Trans. Mechatron. 2019, 24, 1033–1040. [Google Scholar] [CrossRef]
- Xie, S.; Chen, Q. Adaptive nonsingular predefined-time control for attitude stabilization of rigid spacecrafts. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 189–193. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, L. Fixed-time adaptive fuzzy control for uncertain strict feedback switched systems. Inf. Sci. 2021, 546, 742–752. [Google Scholar] [CrossRef]
- Golestani, M.; Esmailzadeh, M.; Mobayen, S. Constrained attitude control for flexible spacecraft: Attitude pointing accuracy and pointing stability improvement. IEEE Trans. Syst. Man Cybern. Syst. 2022. [Google Scholar] [CrossRef]
- Mei, Y.; Wang, J.; Park, J.H.; Shi, K.; Shen, H. Adaptive fixed-time control for nonlinear systems against time-varying actuator faults. Nonlinear Dyn. 2022, 107, 3629–3640. [Google Scholar] [CrossRef]
- Chen, Q.; Ren, X.; Na, J.; Zheng, D. Adaptive robust finite-time neural control of uncertain PMSM servo system with nonlinear dead zone. Neural Comput. Appl. 2017, 28, 3725–3736. [Google Scholar] [CrossRef]
- Jin, X. Adaptive fixed-time control for MIMO nonlinear systems with asymmetric output constraints using universal barrier functions. IEEE Trans. Autom. Control 2019, 64, 3046–3053. [Google Scholar] [CrossRef]
- Huang, Y.; Jia, Y. Adaptive fixed-time six-DOF tracking control for noncooperative spacecraft fly-around mission. IEEE Trans. Control Syst. Technol. 2019, 27, 1796–1804. [Google Scholar] [CrossRef]
- Su, Y.; Zheng, C.; Mercorelli, P. Robust approximate fixed-time tracking control for uncertain robot manipulators. Mech. Syst. Signal Process. 2020, 135, 106379. [Google Scholar] [CrossRef]
- Guo, B.Z.; Zhao, Z.L. On convergence of the nonlinear active disturbance rejection control for MIMO systems. SIAM J. Control Optim. 2013, 51, 1727–1757. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Valderrabano-Gonzalez, A.; Favela-Contreras, A.R.; Rosas-Caro, J.C. Active disturbance rejection control of a magnetic suspension system. Asian J. Control 2015, 17, 842–854. [Google Scholar] [CrossRef]
- Khalil, H.K.; Praly, L. High-gain observers in nonlinear feedback control. Int. J. Robust Nonlinear Control 2014, 24, 993–1015. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica 2013, 49, 3591–3599. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Rahimi, A.; Kumar, K.D.; Alighanbari, H. Fault detection and isolation of control moment gyros for satellite attitude control subsystem. Mech. Syst. Signal Process. 2020, 135, 106419. [Google Scholar] [CrossRef]



















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xuan-Mung, N.; Golestani, M.; Hong, S.K. Constrained Nonsingular Terminal Sliding Mode Attitude Control for Spacecraft: A Funnel Control Approach. Mathematics 2023, 11, 247. https://doi.org/10.3390/math11010247
Xuan-Mung N, Golestani M, Hong SK. Constrained Nonsingular Terminal Sliding Mode Attitude Control for Spacecraft: A Funnel Control Approach. Mathematics. 2023; 11(1):247. https://doi.org/10.3390/math11010247
Chicago/Turabian StyleXuan-Mung, Nguyen, Mehdi Golestani, and Sung Kyung Hong. 2023. "Constrained Nonsingular Terminal Sliding Mode Attitude Control for Spacecraft: A Funnel Control Approach" Mathematics 11, no. 1: 247. https://doi.org/10.3390/math11010247