
A Developed Frequency Control Strategy for Hybrid Two-Area Power System with Renewable Energy Sources Based on an Improved Social Network Search Algorithm




Abstract
:1. Introduction
- -
- Proposing a new improved technique entitled ISNS to change the exploration phase and to overcome the drawbacks of the conventional SNS algorithm, so far applying the ISNS algorithm to select the optimal factors of the proposed control technique.
- -
- Comparing the performance of the proposed ISNS algorithm with other algorithms (i.e., PSO, TSA, GWO, and WHO) in terms of fitness values using 23 benchmark test functions.
- -
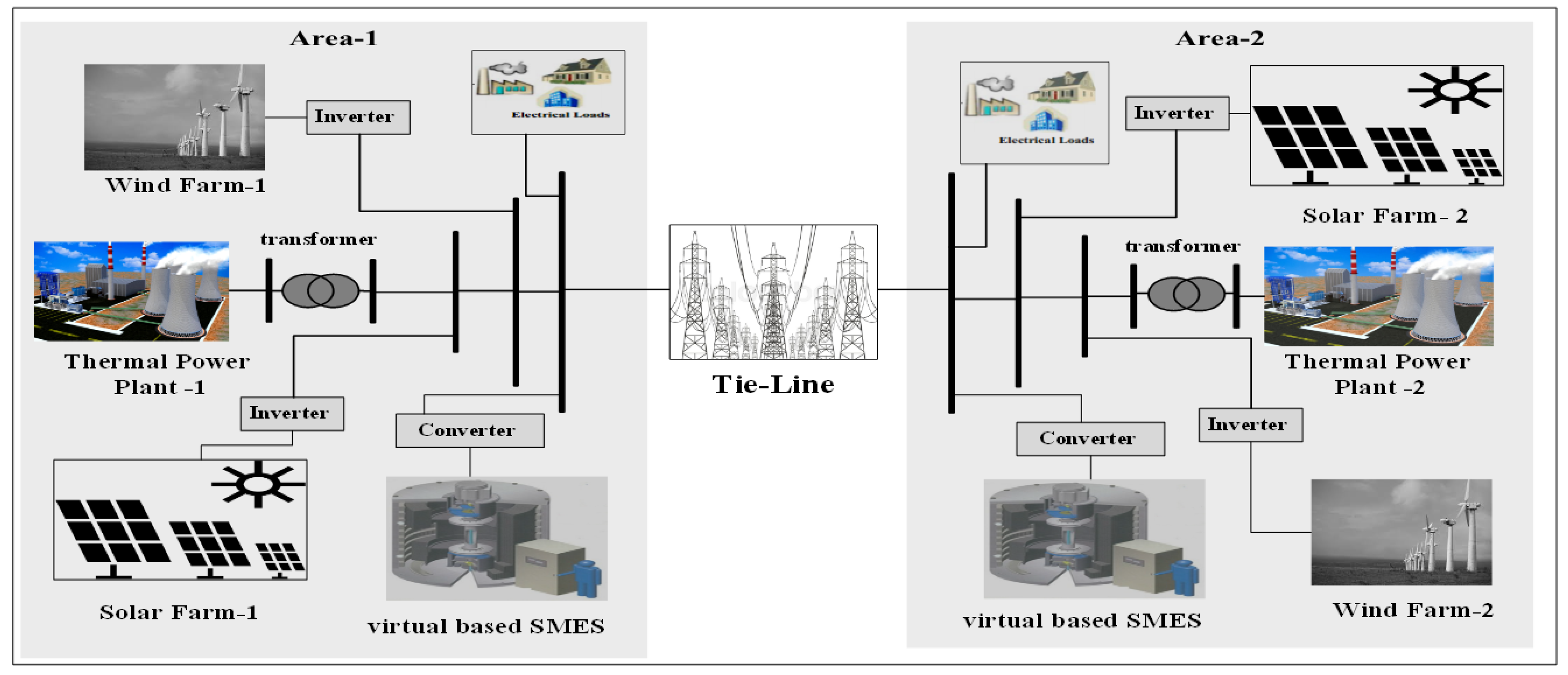
- Considering a hybrid power system that combines conventional power plants (e.g., reheat power plants), renewable power plants (e.g., wind farms and solar farms), energy storage devices (e.g., SMES technology), and high load disturbance to conduct a realistic study of the frequency stability issue for current power grids.
- -
- Based on the authors’ knowledge, it is the first attempt to select the optimal control gains of VIC based on SMES technology to increase the stability of the considered system.
- -
- Comparing the system’s performance based on the proposed strategy with the system performances based on optimal VIC-based traditional ESS, and with the system performance without VIC.
- -
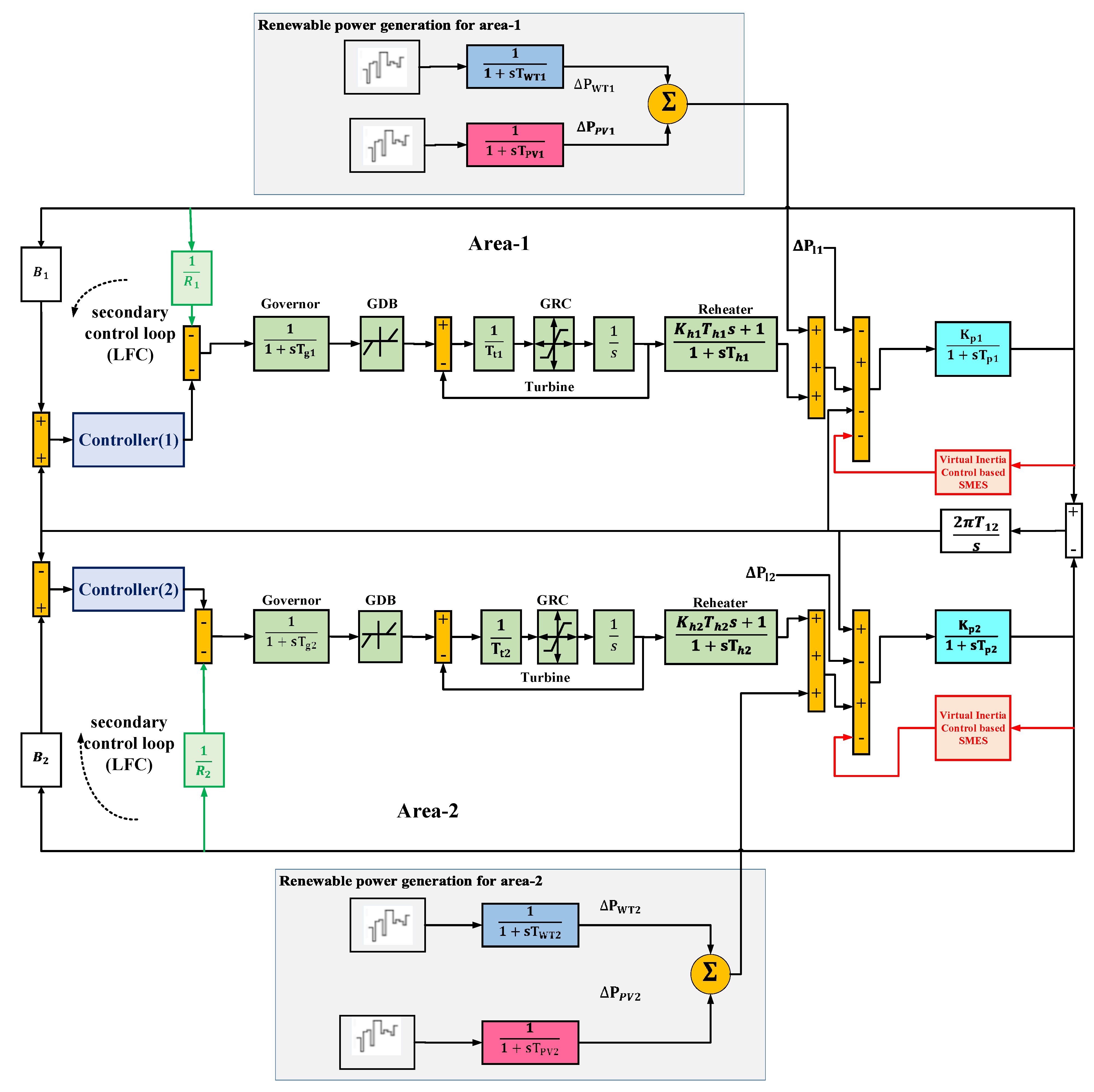
- Considering the system non-linearities (e.g., governor dead band (GDB) and generation rate constraint (GRC)) in the presence of uncertainties of RESs/loads. Additionally, considering GRC with the virtual loop design.
2. System Dynamics
2.1. The Modelling of the System under Consideration
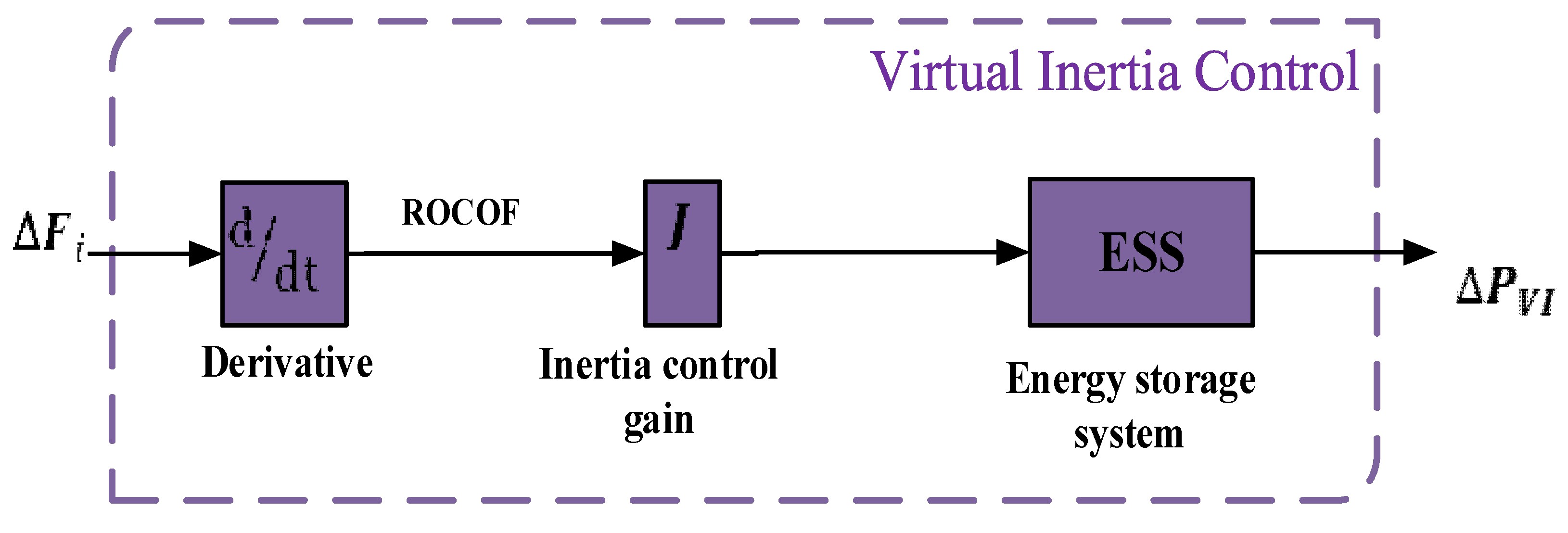
2.2. Modeling of Virtual Inertia Control Loop
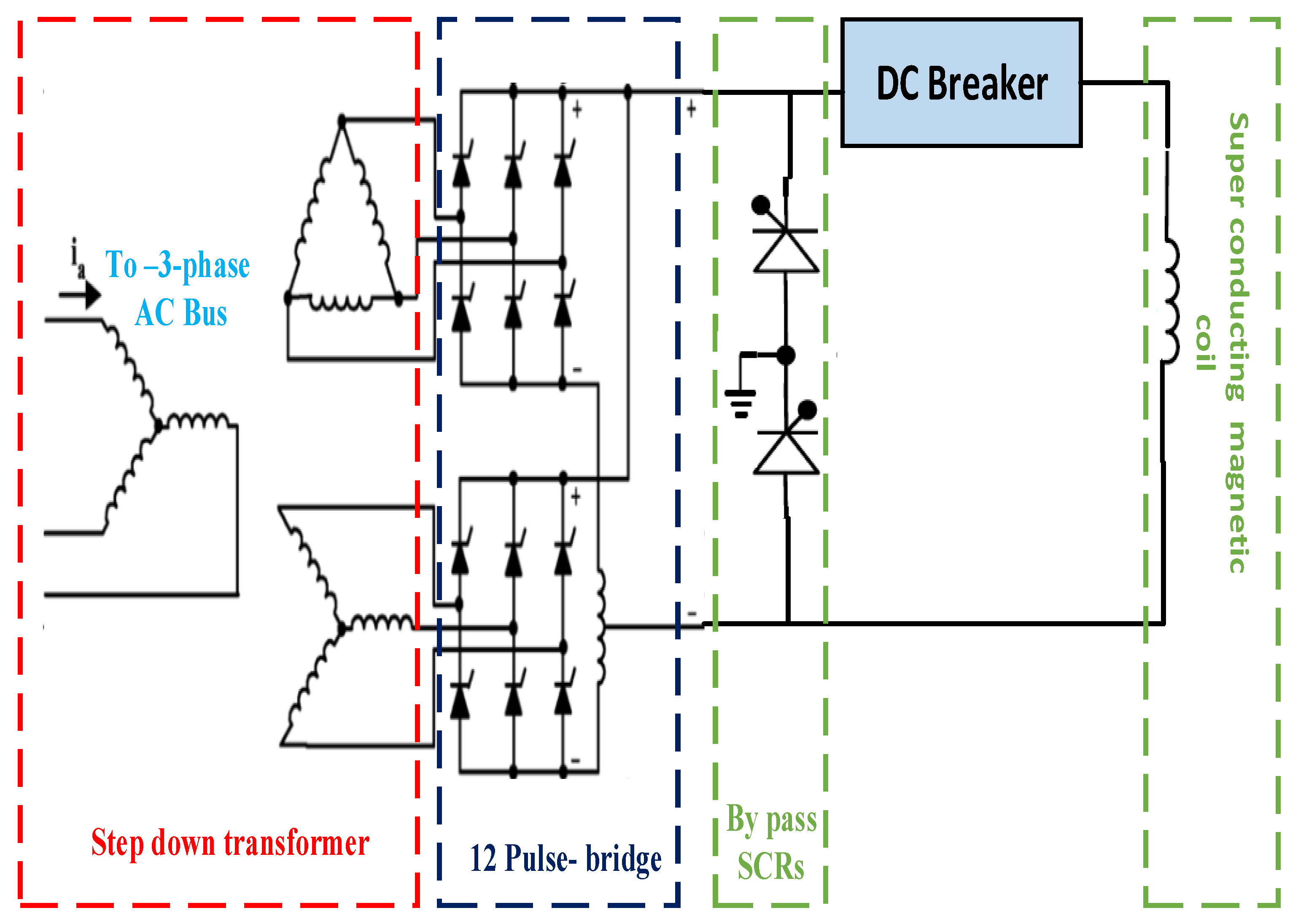
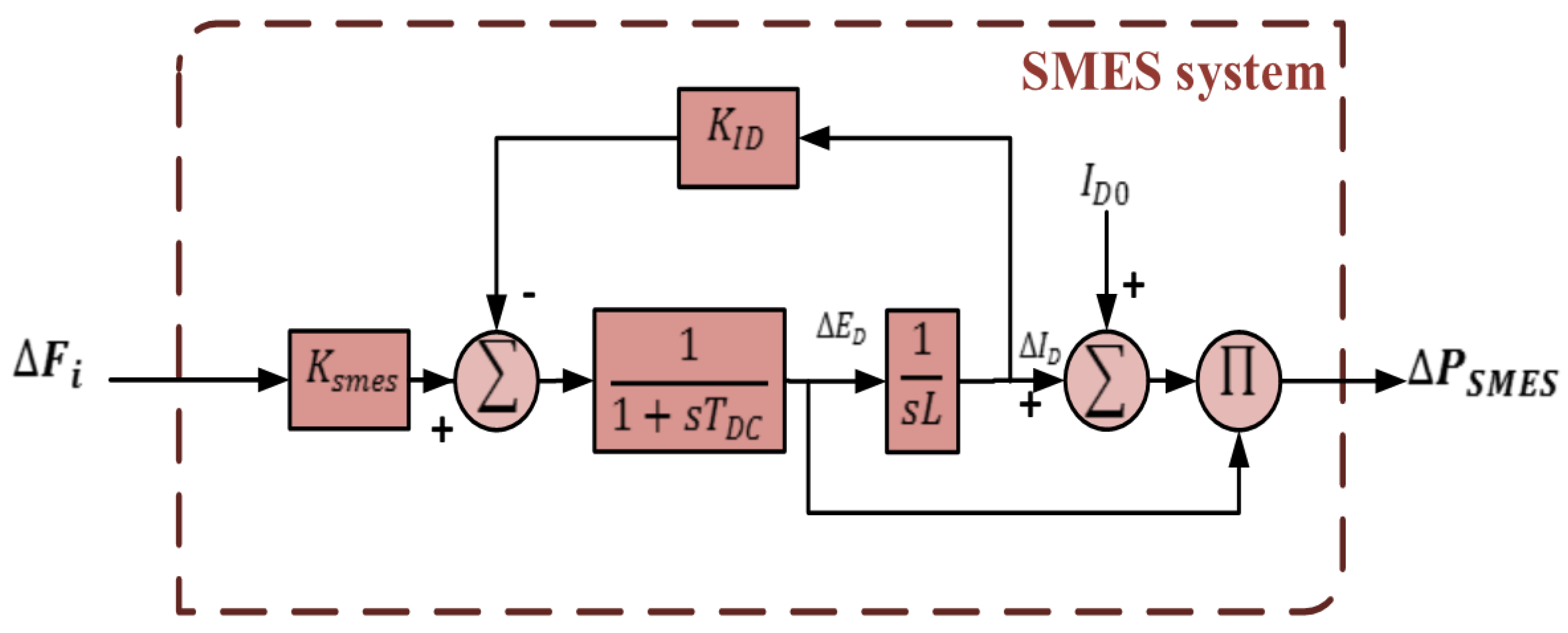
2.3. Modelling of the SMES Technology
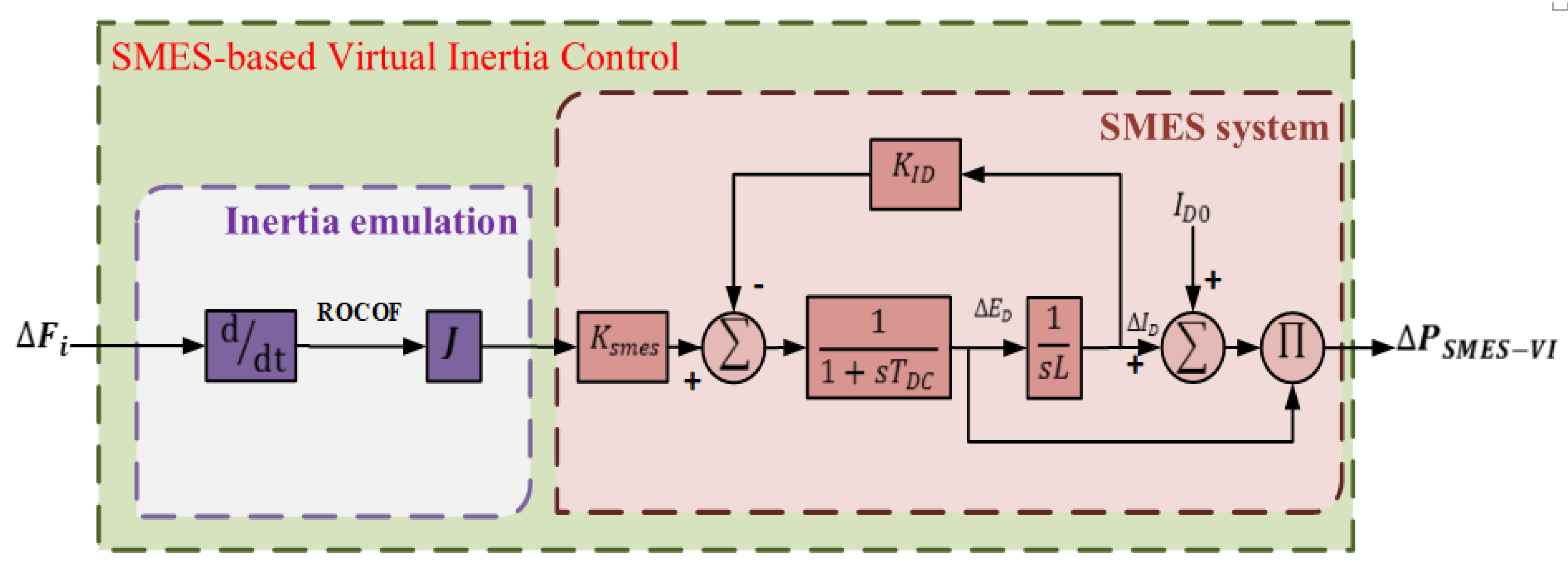
2.4. Modeling of SMES Based VIC
3. The Statement of the Problem and the Recommended Solution
3.1. The Proposed Algorithm
3.1.1. Social Network Search (SNS)
- Imitation
- 2.
- Conversation
- 3.
- Disputation
- 4.
- Innovation
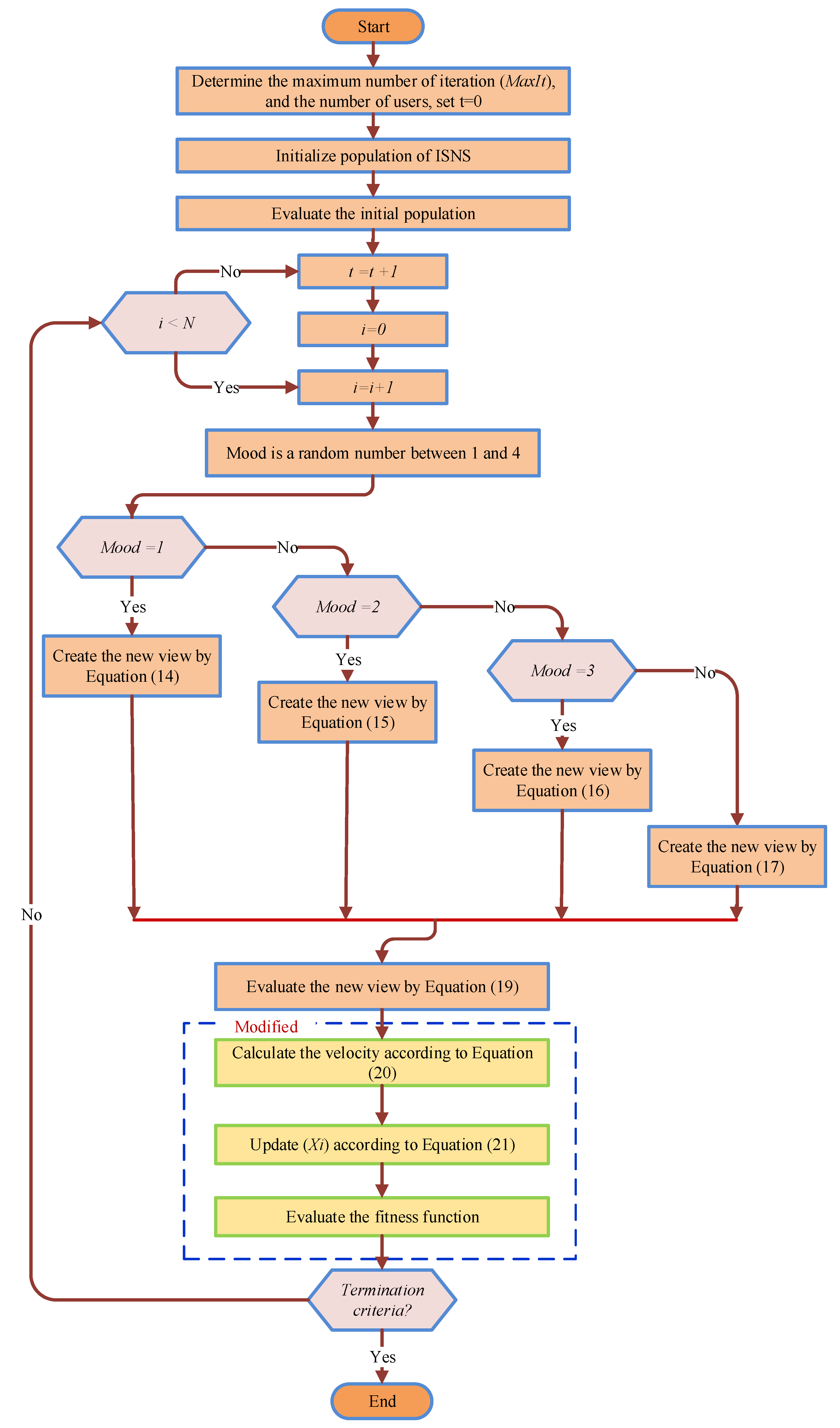
3.1.2. Improved Social Network Search (ISNS)
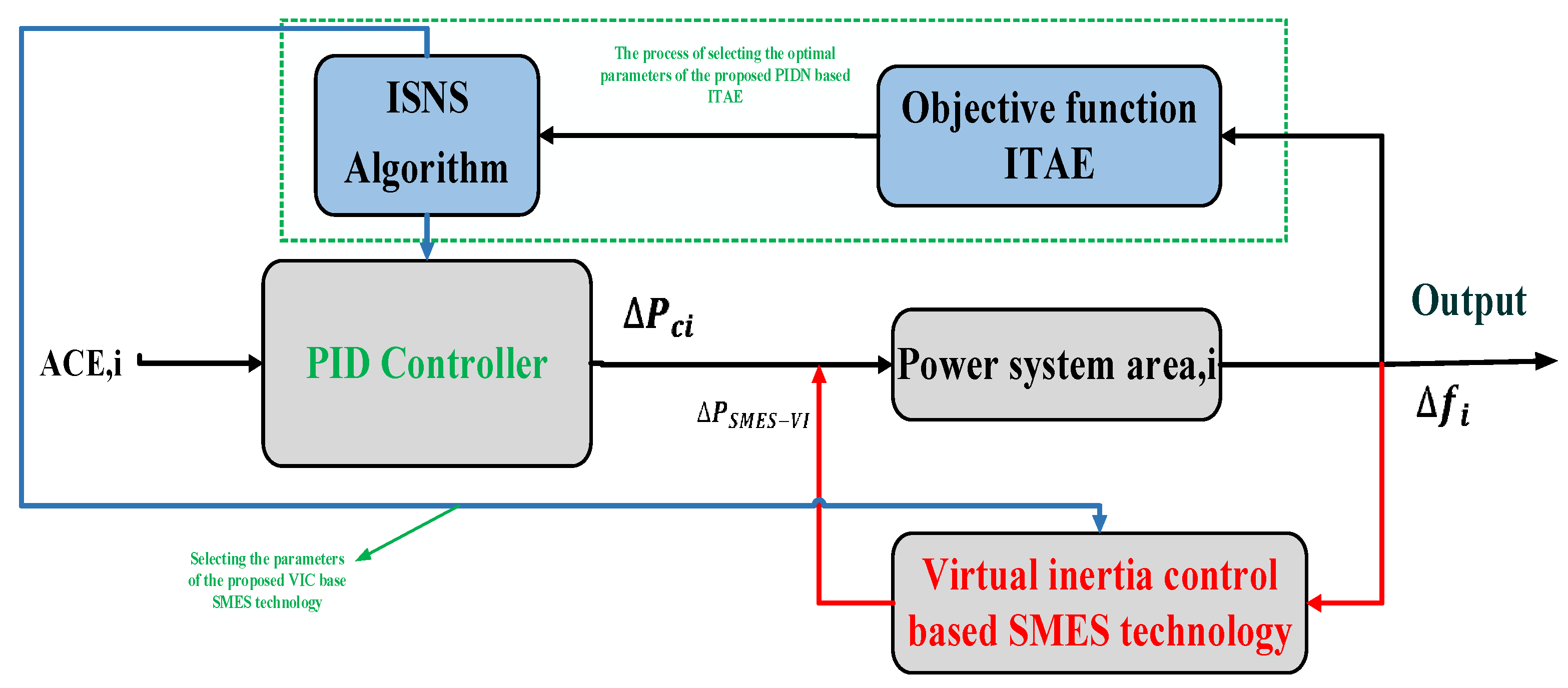
3.2. The Proposed Control Strategy
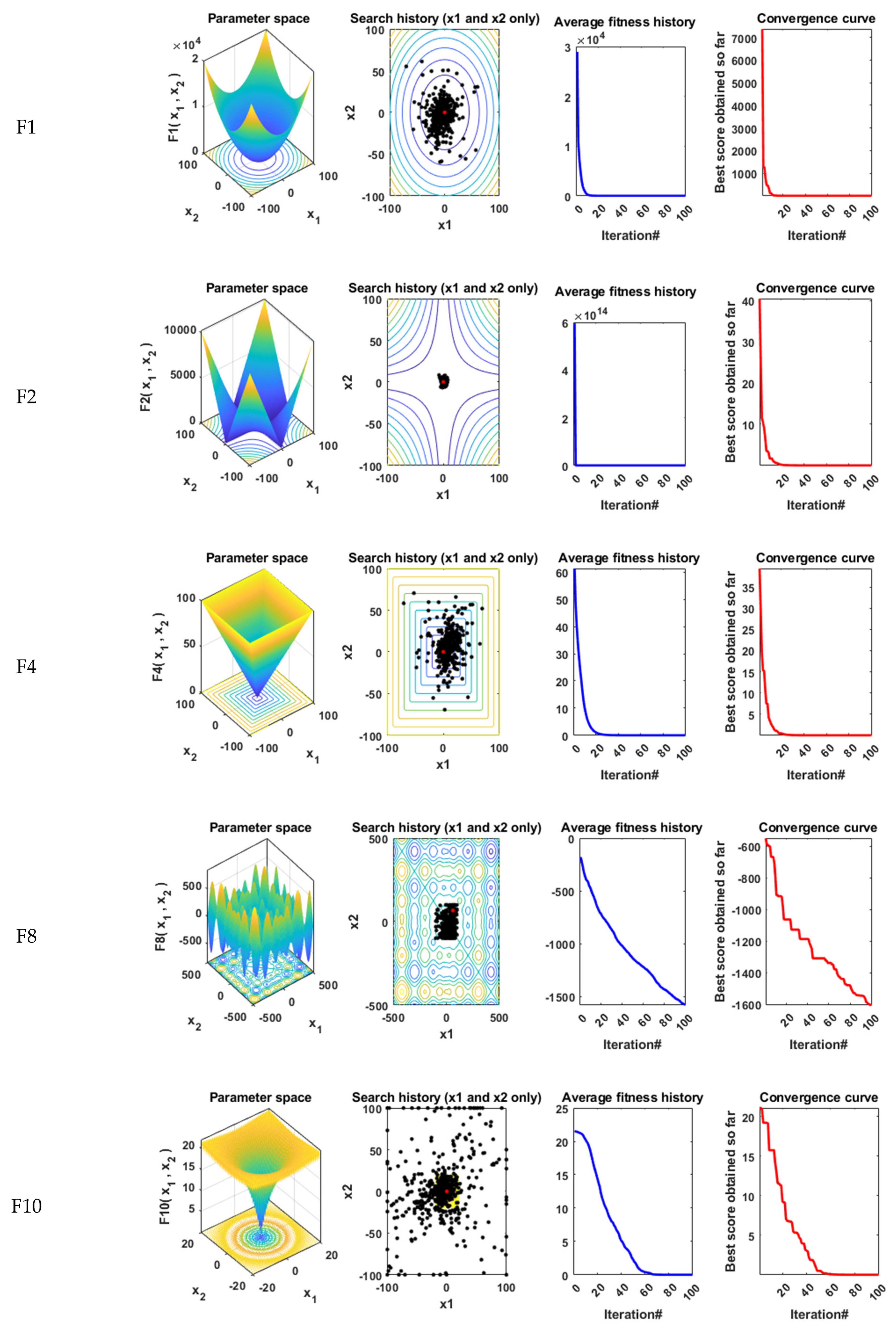
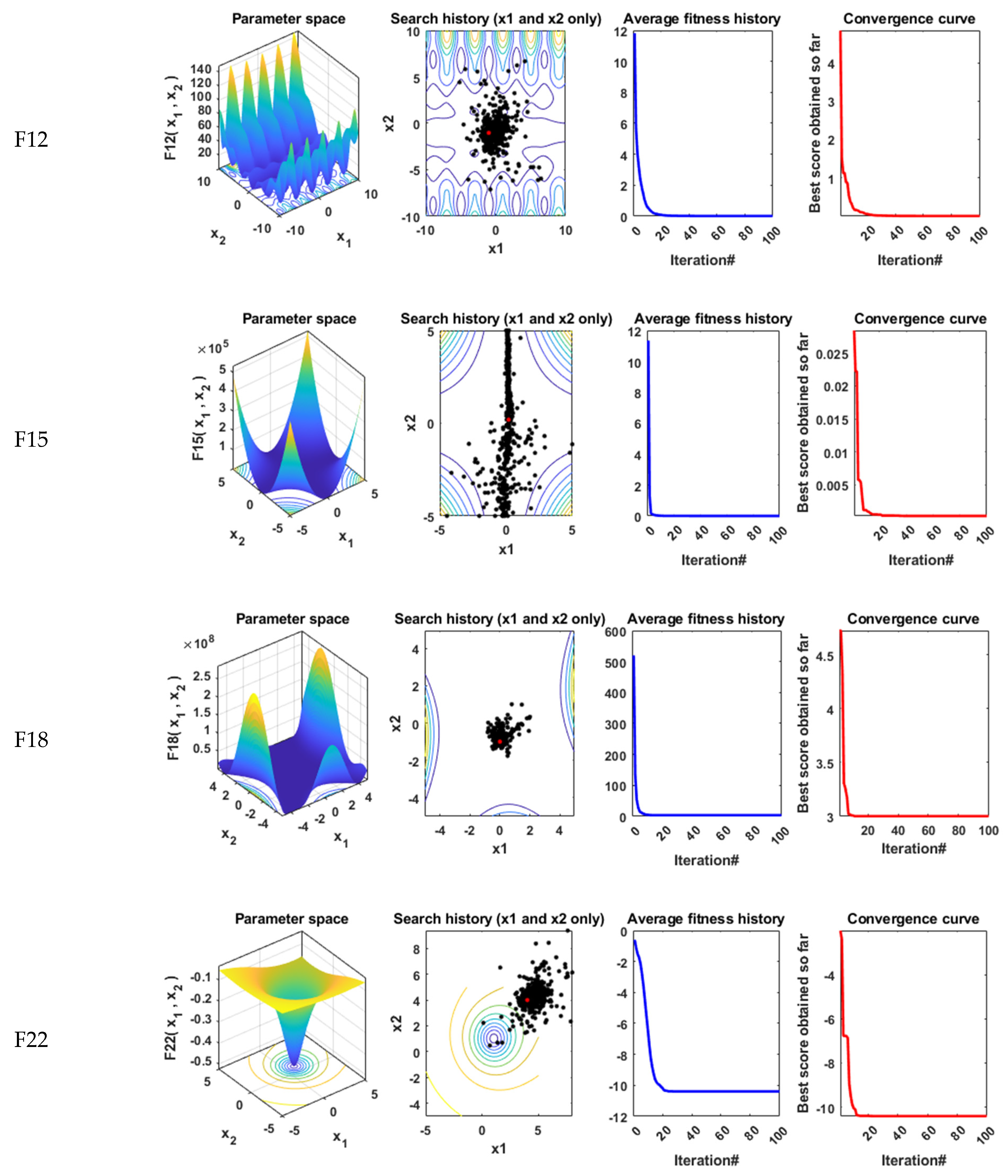
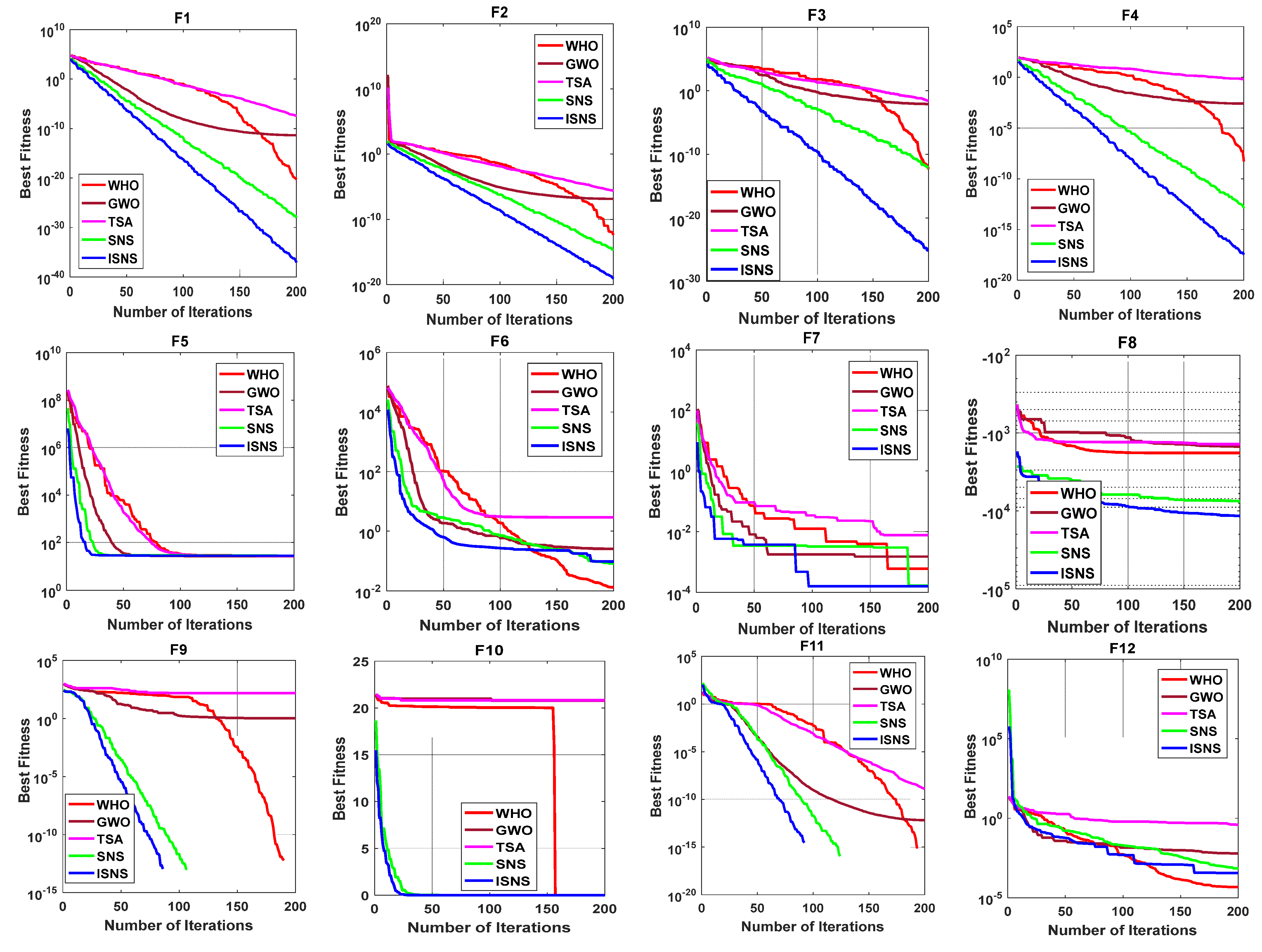
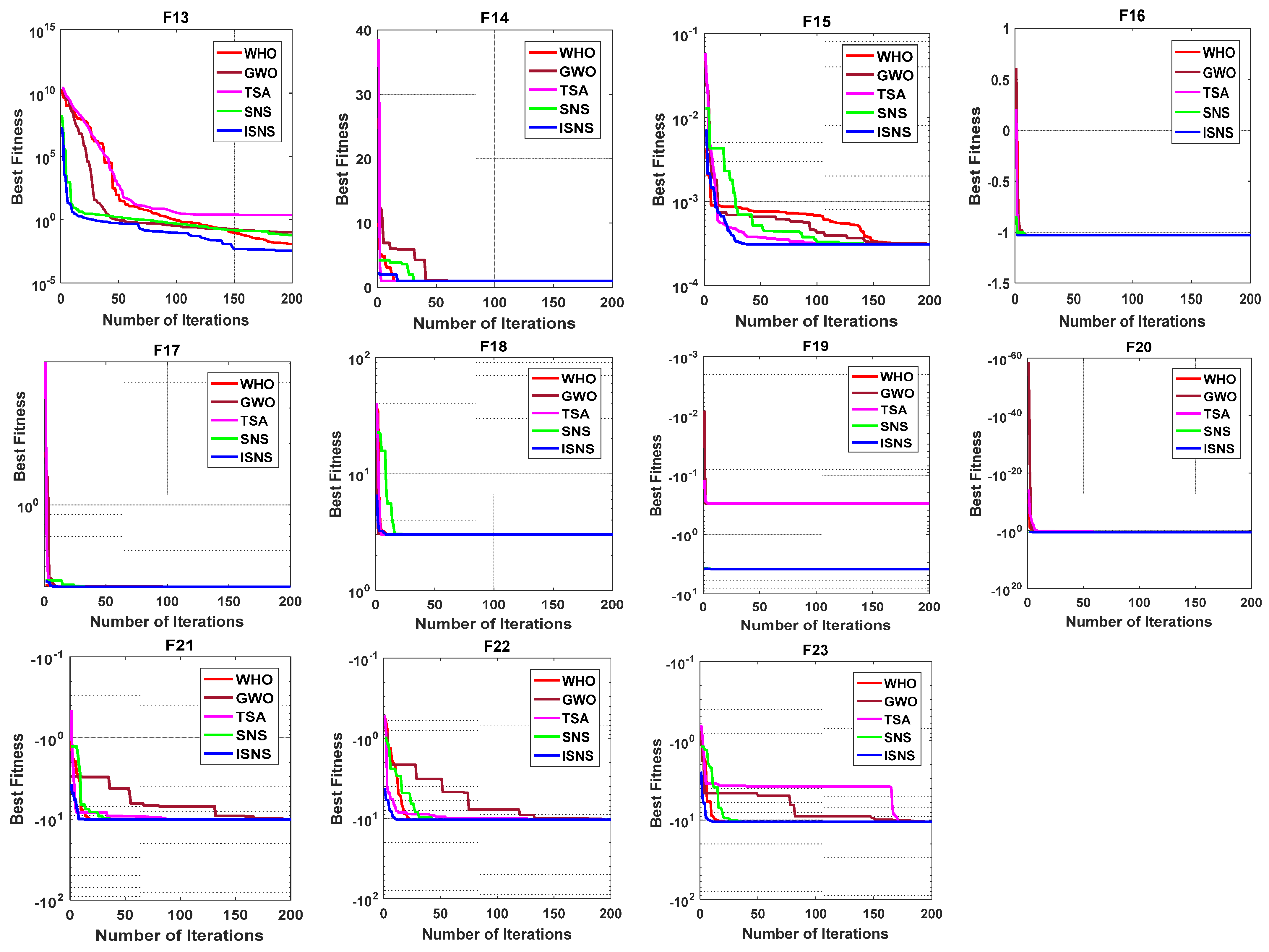
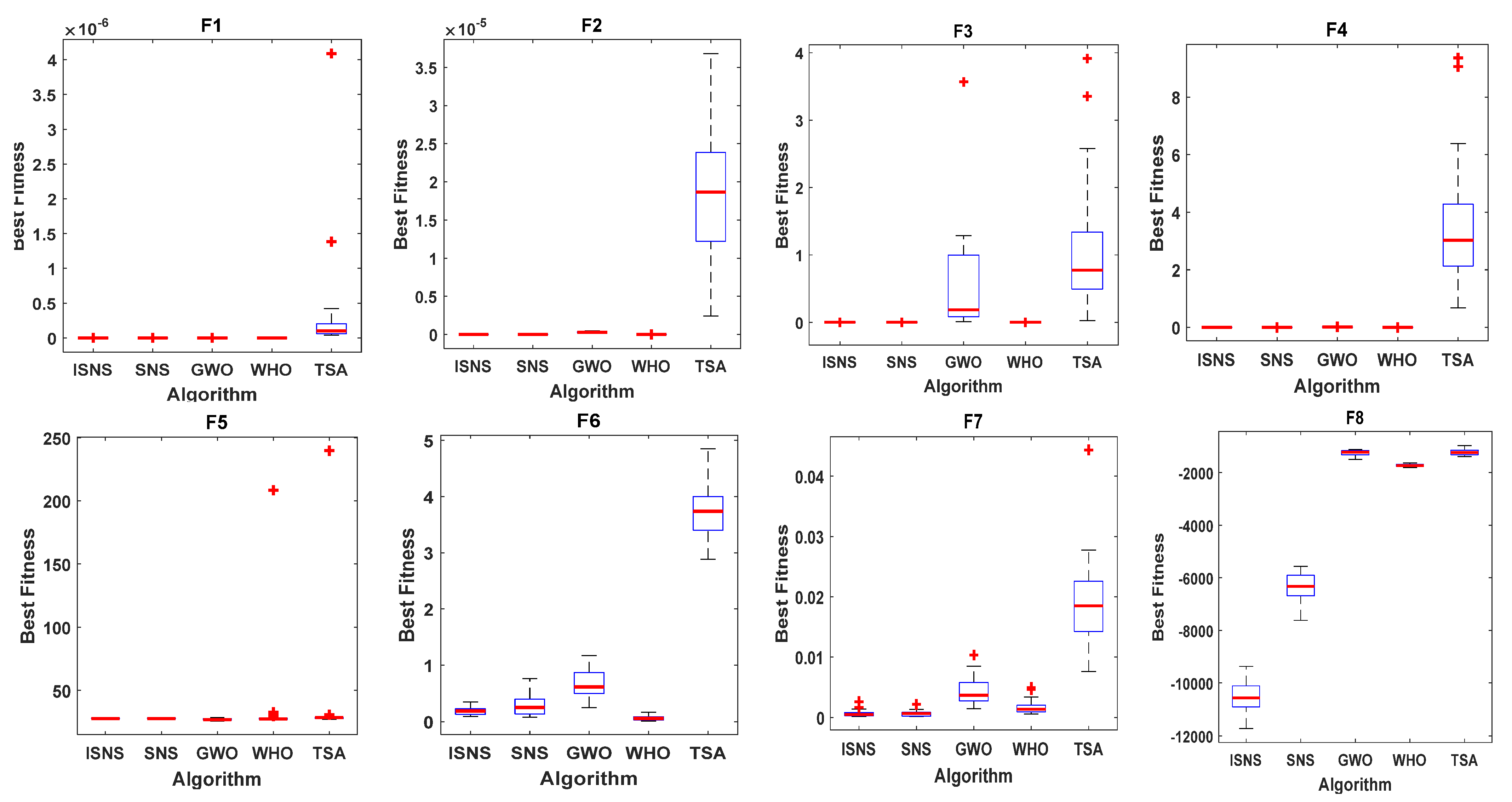
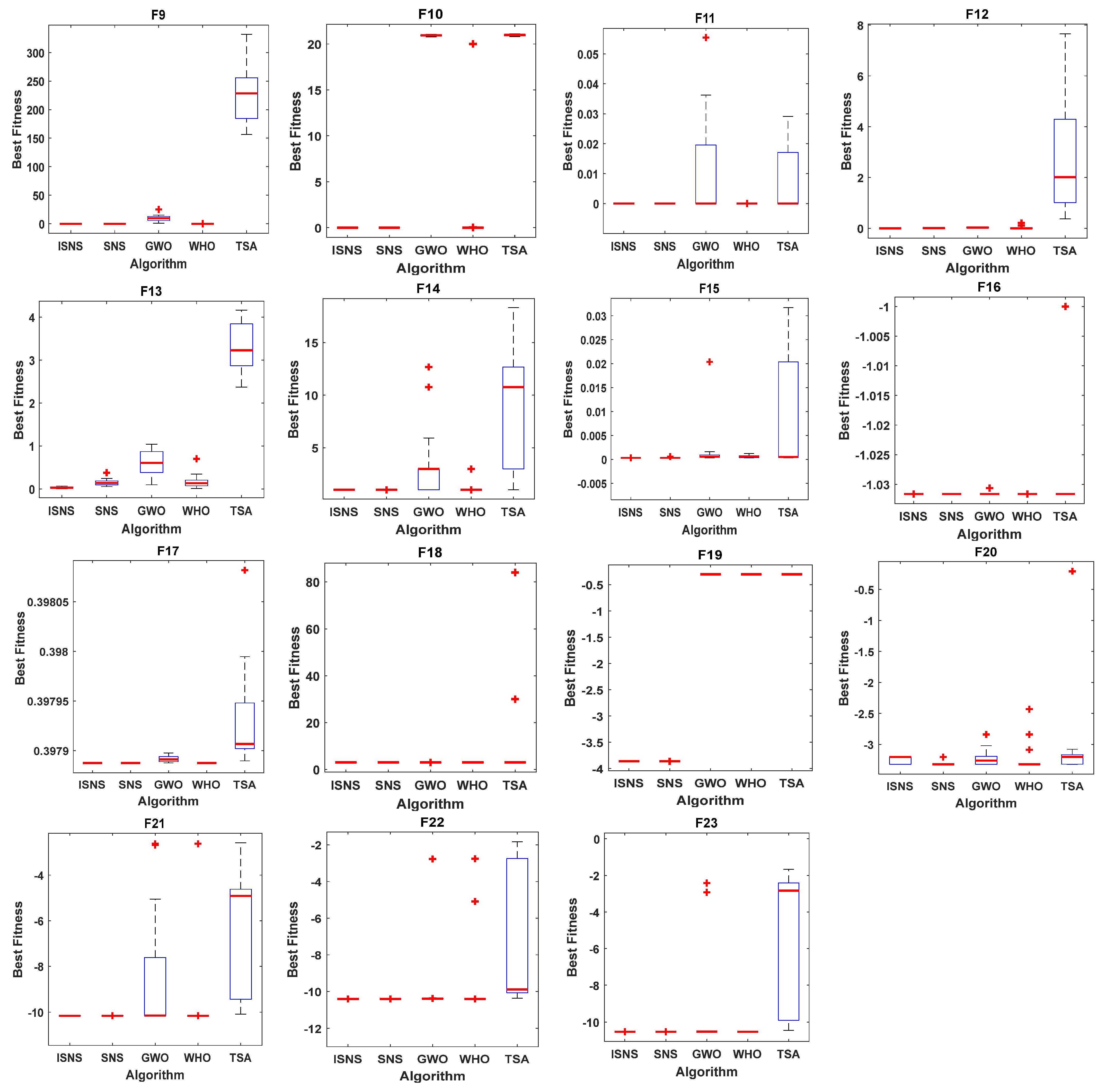
4. Performance Analysis of the Improved SNS Algorithm
Benchmark Functions
5. Simulation Results
- Scenario 1: Estimation of system performance considering various optimization techniques.
- Scenario 2: Estimation of system performance considering low and high renewable power penetration.
- Scenario 3: Estimation of system performance considering high renewable power penetration and optimal VIC-based SMES technology.
- Scenario 4: Estimation of system performance considering high renewable power penetration, low of system inertia, and optimal VIC based SMES technology.
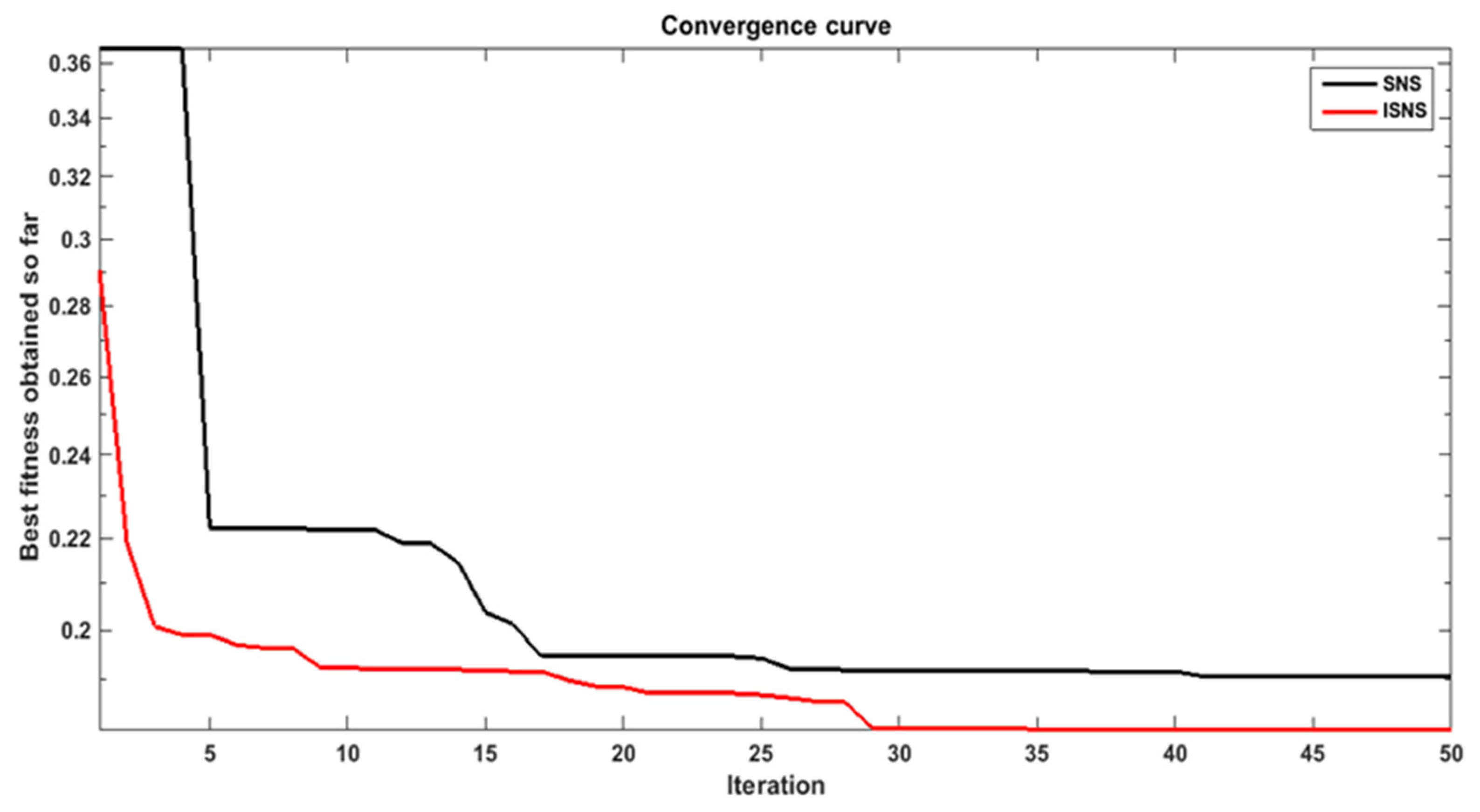
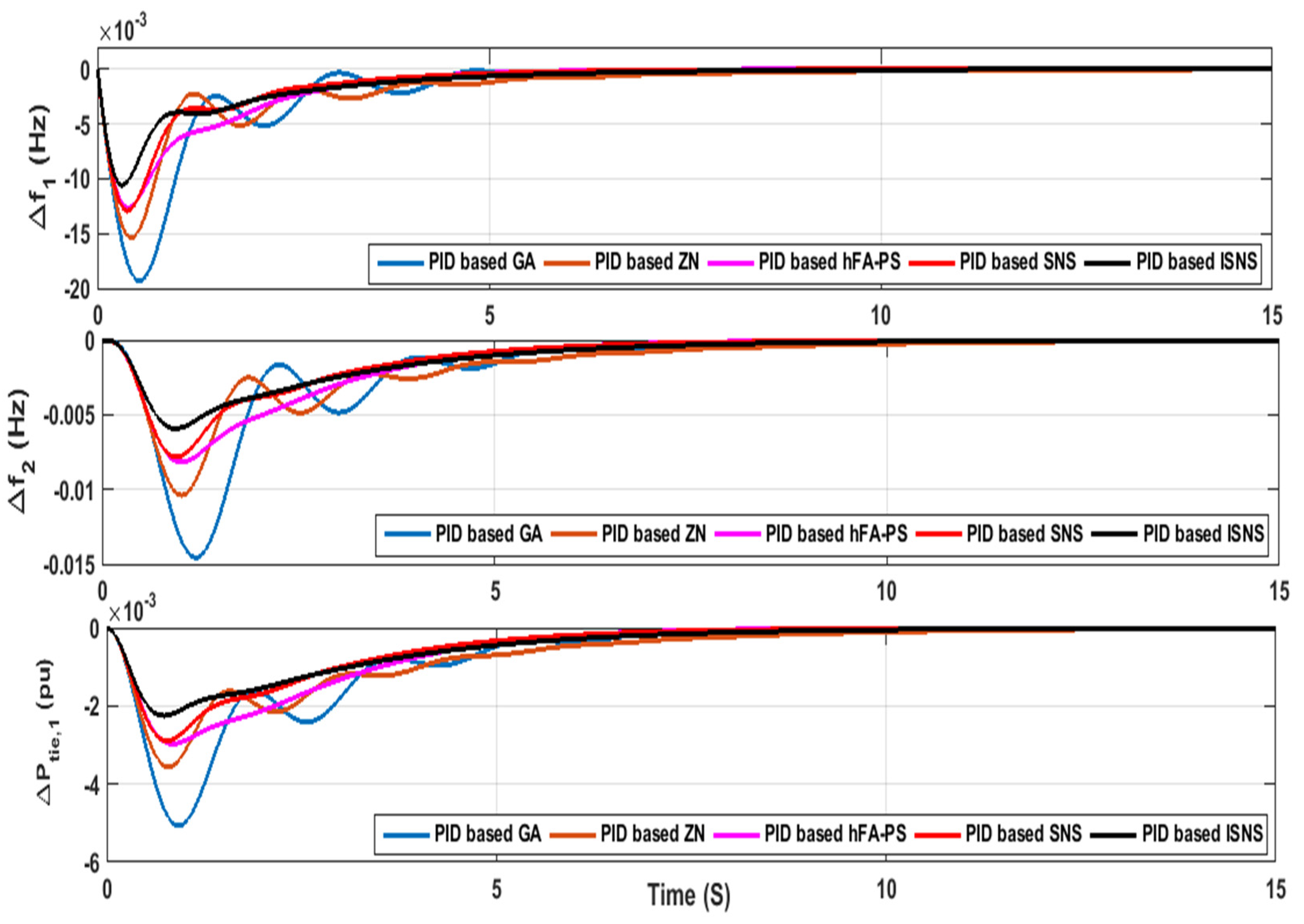
5.1. Scenario 1: Estimation of System Performance Considering Various Optimization Techniques
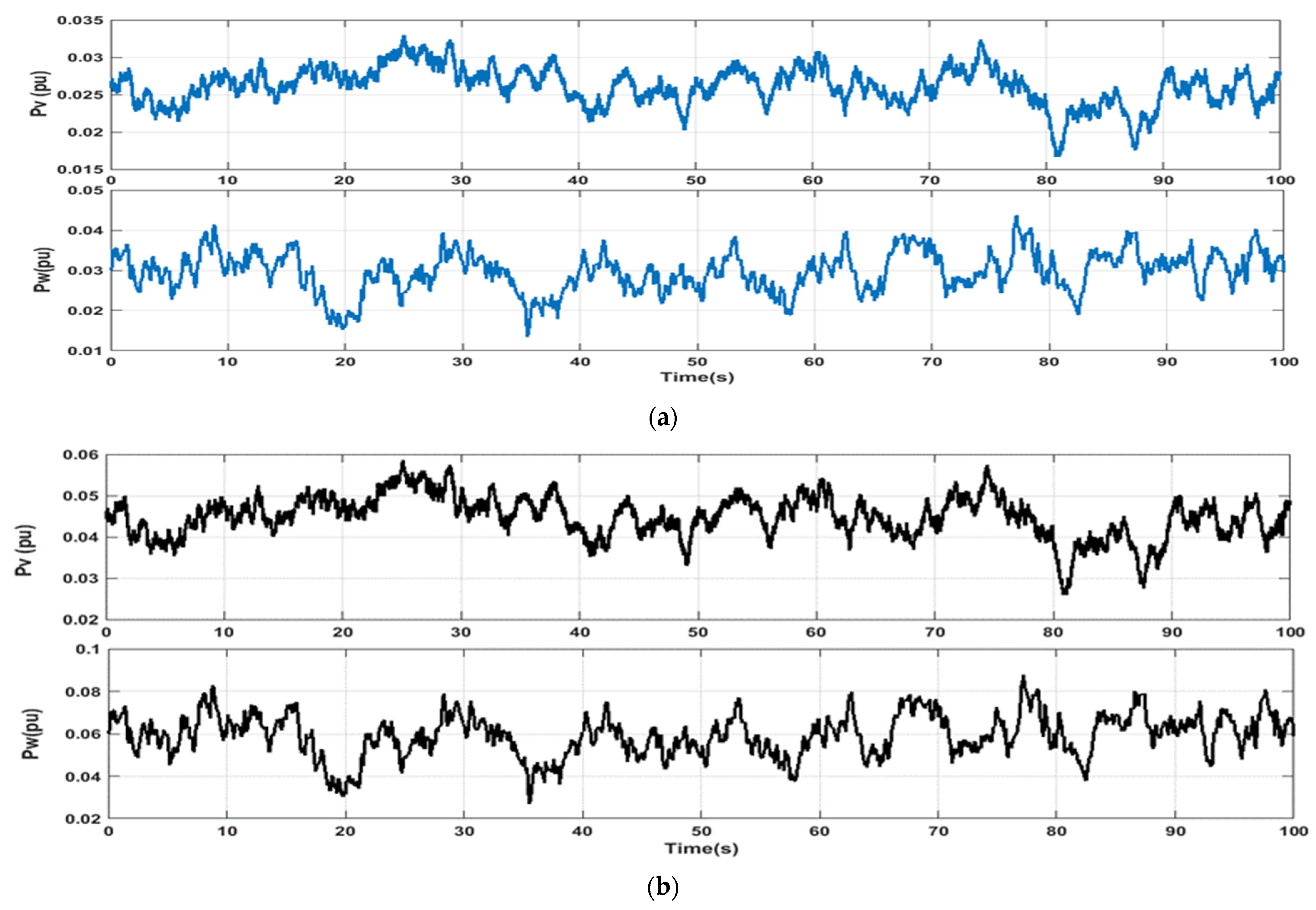
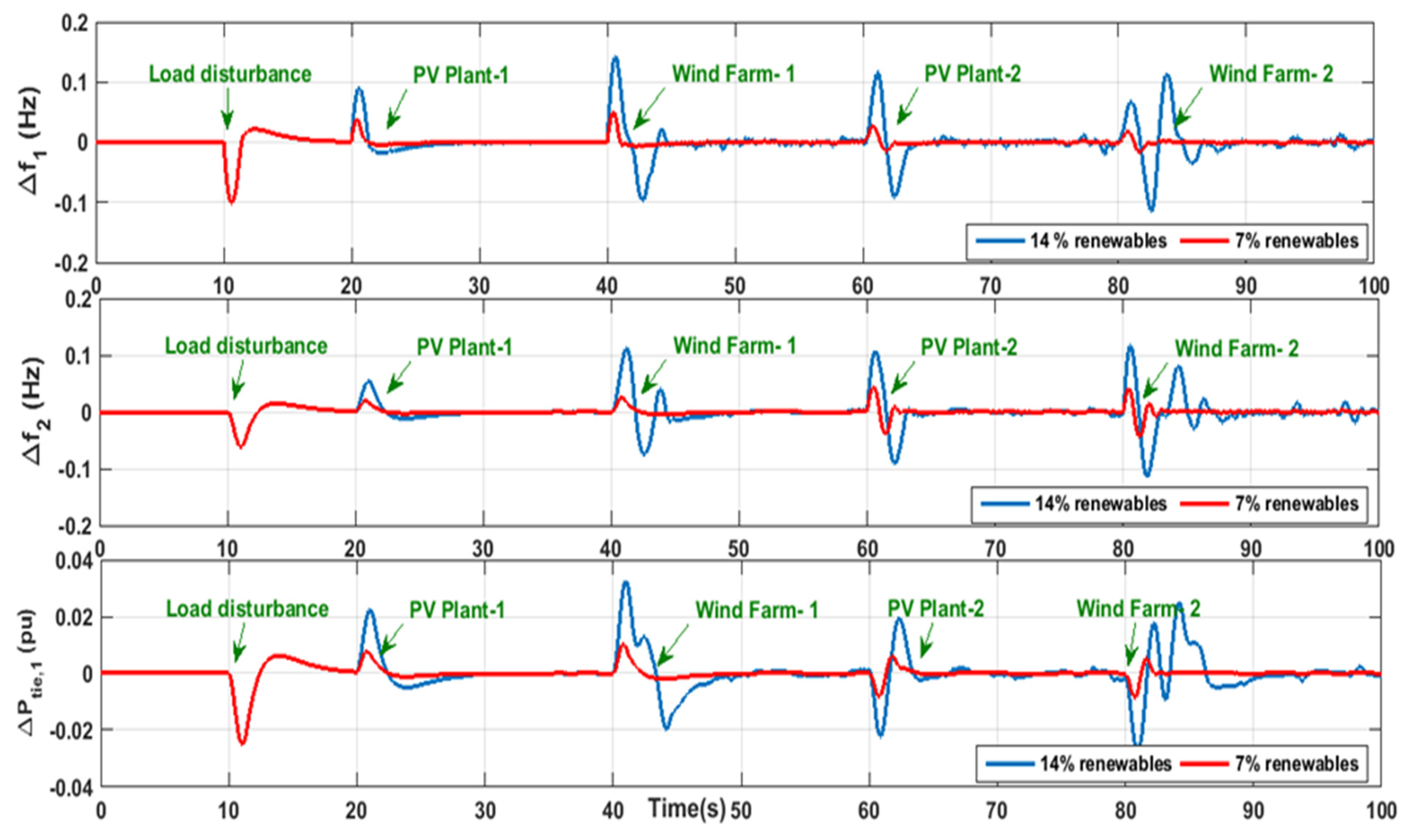
5.2. Scenario 2: Estimation of System Performance Considering Low and High Renewables Power Penetration
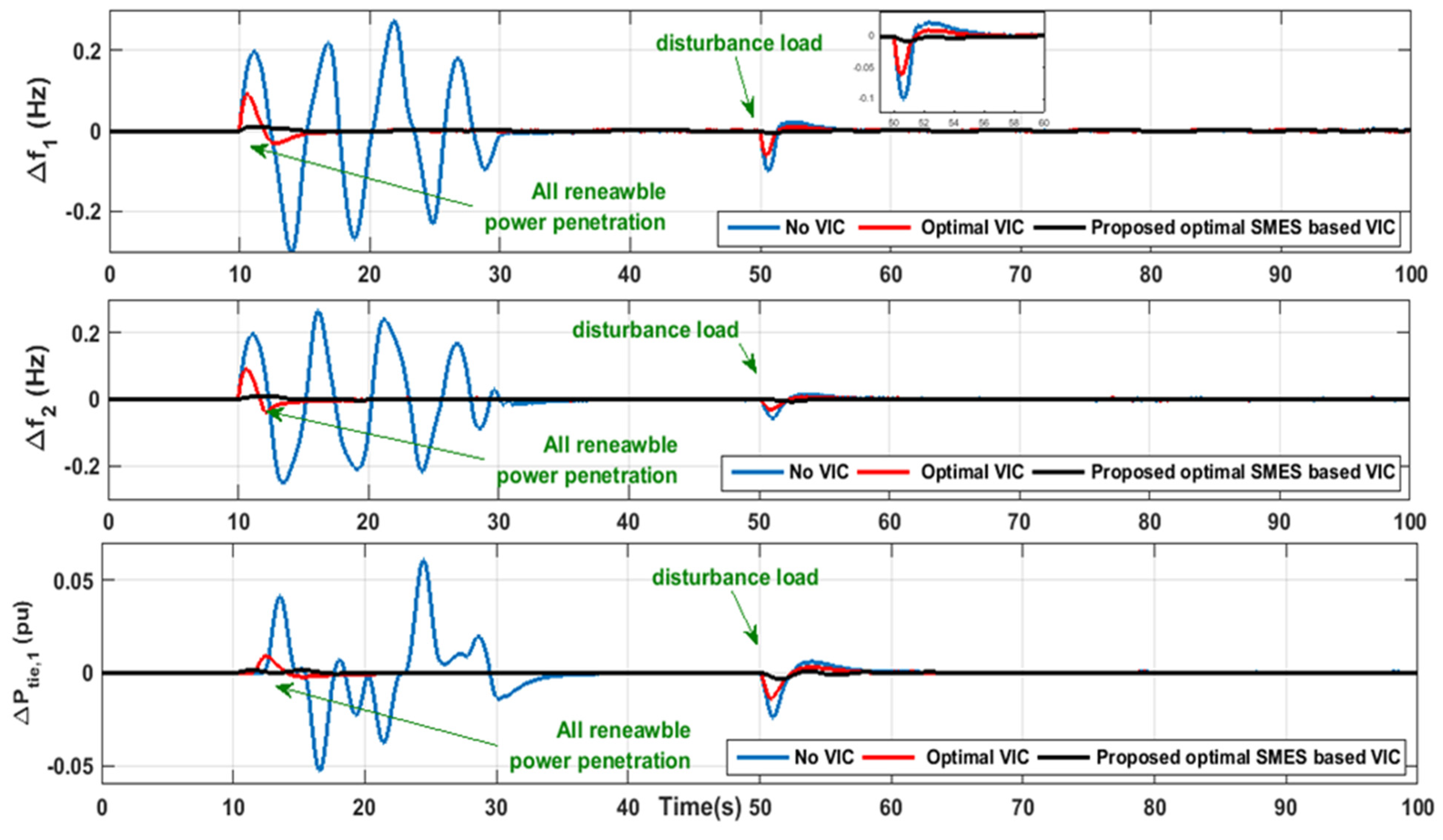
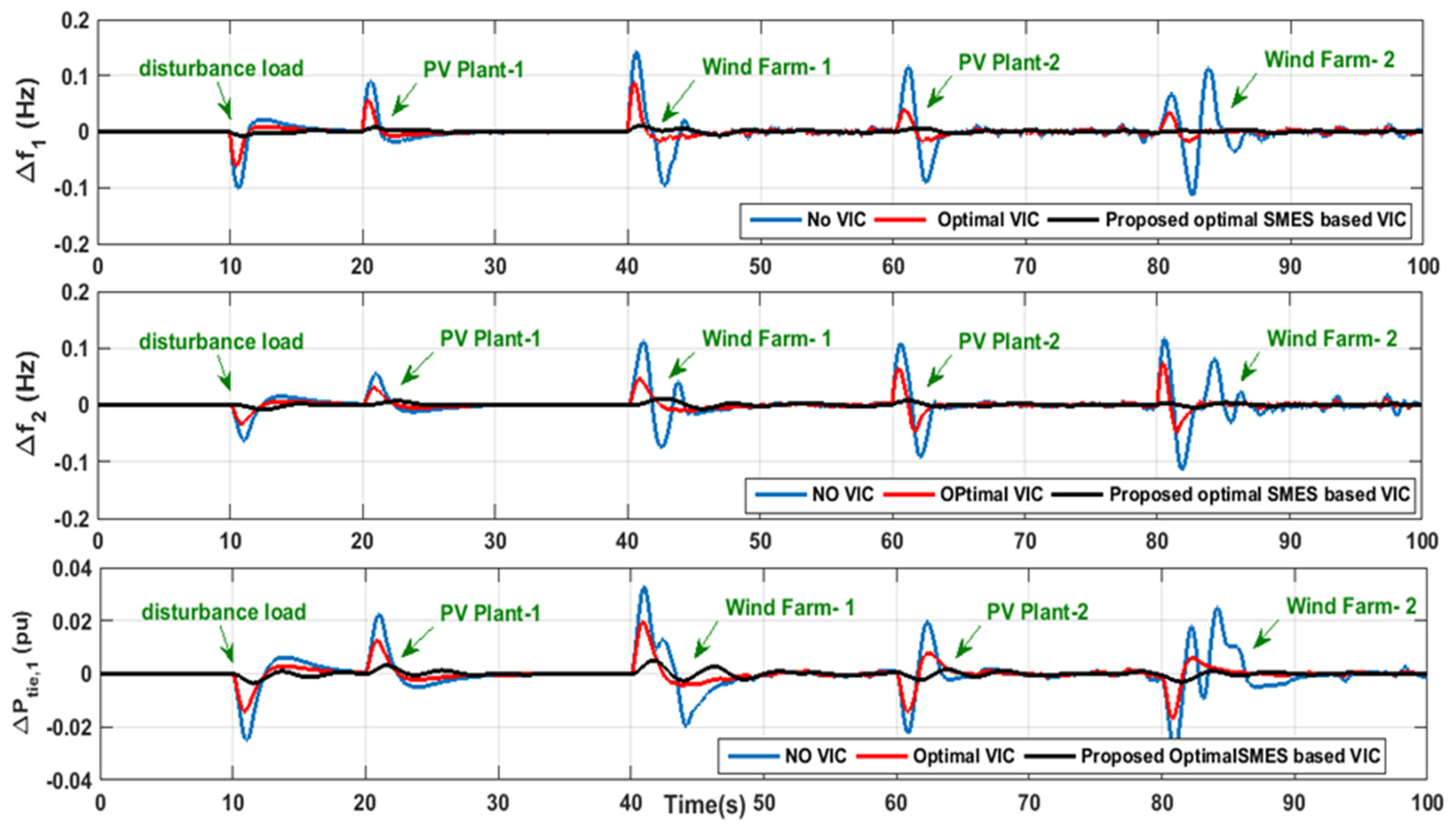
5.3. Scenario 3: Estimation of System Performance Considering High Renewables Power Penetration and Optimal VIC Based SMES Technology
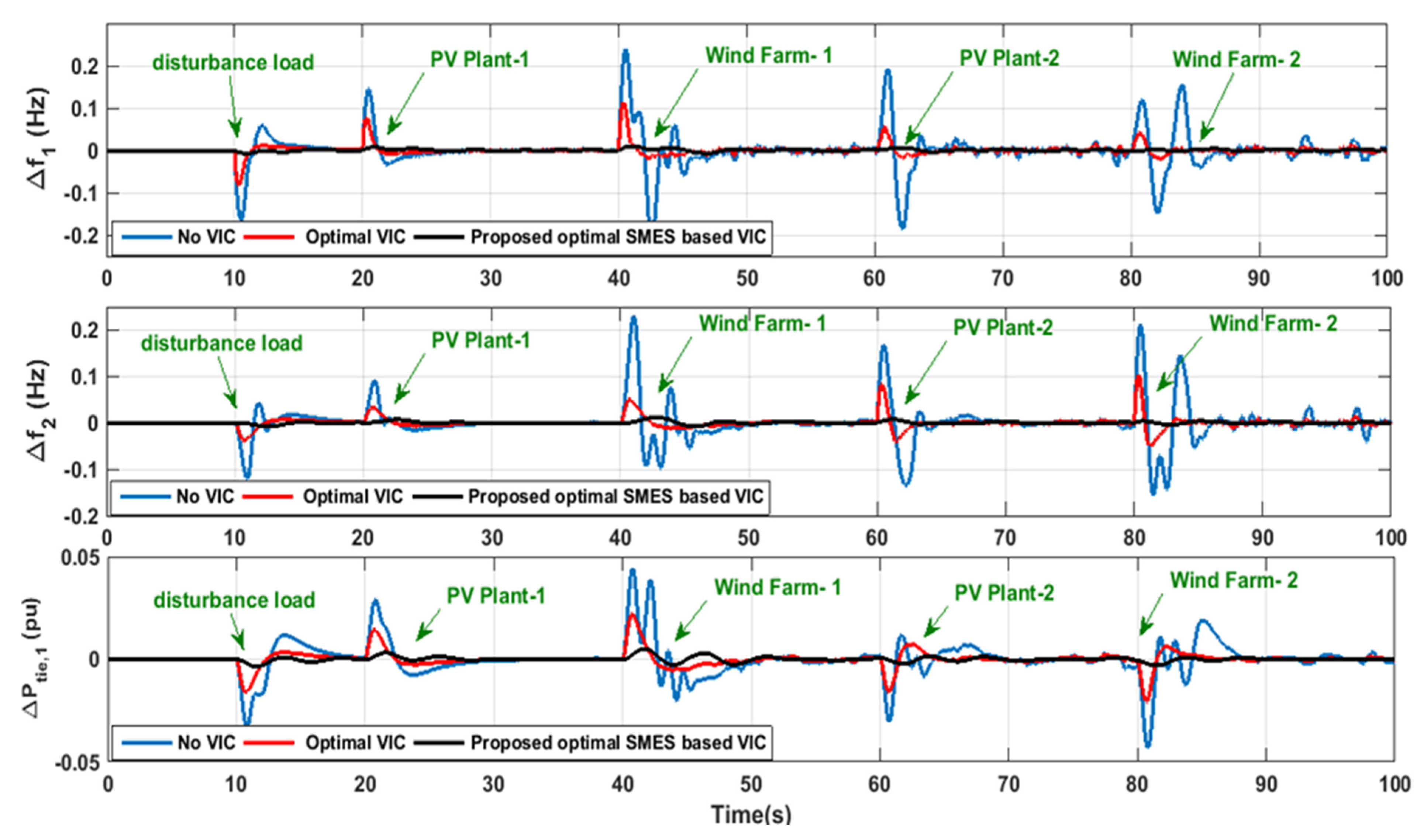
5.4. Scenario 4: Estimation of System Performance Considering High Renewables Power Penetration, Low of System Inertia, and Optimal VIC Based SMES Technology
6. Conclusions
- An improved version of the SNS algorithm known as ISNS has been proposed to eliminate the demerits of the SNS algorithm (i.e., changing the exploration phase).
- The superiority of the proposed ISNS algorithm has been validated by comparing its performance with conventional SNS, TSA, GWO, and WHO techniques based on a bench functions test.
- According to the superiority of the ISNS algorithm, it has been applied to tune the PID controller parameters in a hybrid two area power system, considering system nonlinearities, high renewable power penetration, and load disturbance.
- With the high renewable power penetration, the inertia of the system decreases and the instability problem occurs. An efficient control strategy based on optimal VIC based on SMES technology has been proposed to compensate for the losses in the system inertia.
- Selecting the control gains of the proposed strategy based on the ISNS algorithm to improve the performance of the system effectively.
- More than one scenario has been tested to validate the effectiveness of the proposed control strategy considering different operating conditions (i.e., low renewable power penetration, high renewable power penetration, losses of system inertia).
- The system performance with the proposed strategy (e.g., optimal VIC based on SMES technology) has been improved by 50% and 90% compared to the systems based on the traditional optimal VIC-based ESS devices and the systems without VIC.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| ESS | Energy storage system |
| SMES | Superconducting magnetic energy storage |
| VIC | Virtual inertia control |
| SCL | Secondary control loop |
| ISNS | Improved social network search algorithm |
| PID | Proportional-integral derivative |
| VRE | Variable renewable energy |
| RESs | Renewable energy sources |
| DTR | Dynamic thermal rating |
| LFC | Load frequency control |
| MPC | Model predictive control |
| LAPO | Lightning attachment procedure optimization |
| VSG | Virtual synchronous generators |
| GDB | Governor dead band |
| GRC | Generation rate constraint |
| PCS | Power conditioning system |
| PSO | Particle swarm optimizer |
| IAE | Integral Absolute Error |
| ITAE | Integral Time Weighted Absolute Error |
| ISE | Integral Square Error |
| ITSE | Integral Time Weighted Square Error |
| TSA | Tunicate swarm algorithm |
| GWO | Gray wolf optimizer |
| WHO | Wild horse optimizer |
| The mechanical power deviation of area i | |
| The load change of area i | |
| The deviations of the tie-line power among area-i, | |
| The wind turbine’s output power of area i | |
| The PV system’s output power of area i | |
| The governor’s time constant of area i | |
| The turbine’s time constant of area i | |
| The reheater gain of area i | |
| The time constant of the reheater of area i | |
| The governor’s speed regulation of area i | |
| The regulating of the system frequency of reheat power plant of the area i | |
| The wind turbine time constant of area i | |
| The wind power variation of area i | |
| The PV time constant of area i | |
| The solar power variation of area i | |
| n | The number of the controlled area |
| The synchronization time between two controlled areas | |
| The area bias factor | |
| The area control error of area i | |
| The power system’s time constant of area i | |
| The power system gain of area i | |
| The maximum circuit bridge voltage | |
| The current flowing through the inductor | |
| The damping resistor | |
| The inductor voltage deviations | |
| The control gain for the SMES loop | |
| The convertor time constant of the SMES | |
| The SMES feedback gain | |
| The inductor current deviation | |
| L | The induction coil |
| The vector of the jth user’s view | |
| The vector of the ith user’s view | |
| The vector of the issue | |
| AF | The admission factor |
| The group size | |
| The dth variable | |
| The new idea | |
| The current idea | |
| kd | The derivative gain |
| ki | The integral gain |
| kp | The proportional gain |
| N | The derivative filter coefficient |
| J | The inertia gain |
| The SMES negative feedback gain |
Appendix A
References
- Morales-España, G.; Nycander, E.; Sijm, J. Reducing CO2 emissions by curtailing renewables: Examples from optimal power system operation. Energy Econ. 2021, 99, 105277. [Google Scholar] [CrossRef]
- Joos, M.; Staffell, I. Short-term integration costs of variable renewable energy: Wind curtailment and balancing in Britain and Germany. Renew. Sustain. Energy Rev. 2018, 86, 45–65. [Google Scholar] [CrossRef]
- Gianfreda, A.; Parisio, L.; Pelagatti, M. A review of balancing costs in Italy before and after RES introduction. Renew. Sustain. Energy Rev. 2018, 91, 549–563. [Google Scholar] [CrossRef] [Green Version]
- Teh, J.; Lai, C.-M.; Cheng, Y.-H. Improving the Penetration of Wind Power with Dynamic Thermal Rating System, Static VAR Compensator and Multi-Objective Genetic Algorithm. Energies 2018, 11, 815. [Google Scholar] [CrossRef] [Green Version]
- Lai, C.-M.; Teh, J. Network topology optimisation based on dynamic thermal rating and battery storage systems for improved wind penetration and reliability. Appl. Energy 2022, 305, 117837. [Google Scholar] [CrossRef]
- Thrampoulidis, C.; Bose, S.; Hassibi, B. Optimal Placement of Distributed Energy Storage in Power Networks. IEEE Trans. Autom. Control. 2016, 61, 416–429. [Google Scholar] [CrossRef]
- Sidea, D.O.; Picioroaga, I.I.; Bulac, C. Optimal Battery Energy Storage System Scheduling Based on Mutation-Improved Grey Wolf Optimizer Using GPU-Accelerated Load Flow in Active Distribution Networks. IEEE Access 2021, 9, 13922–13937. [Google Scholar] [CrossRef]
- Ali, M.; Kotb, H.; AboRas, K.M.; Abbasy, N.H. Design of Cascaded PI-Fractional Order PID Controller for Improving the Frequency Response of Hybrid Microgrid System Using Gorilla Troops Optimizer; IEEE Access. Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2021. [Google Scholar]
- Khadanga, R.K.; Kumar, A.; Panda, S. Frequency control in hybrid distributed power systems via type-2 fuzzy PID controller. IET Renew. Power Gener. 2021, 15, 1706–1723. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, J.; Xu, S. H-Infinity Load Frequency Control of Networked Power Systems via an Event-Triggered Scheme. IEEE Trans. Ind. Electron. 2020, 67, 7104–7113. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Kamel, S.; Khan, B. Optimal Model Predictive and Linear Quadratic Gaussian Control for Frequency Stability of Power Systems Considering Wind Energy. IEEE Access 2021, 9, 116453–116474. [Google Scholar] [CrossRef]
- Shabib, G.; Mohamed, T.H.; Abrdelhameed, E.H.; Khamies, M. An Advanced Linear Quadratic Regulator For Load Frequency. In Proceedings of the 17th International Middle East Power Systems Conference, Mansoura, Egypt, 15–17 December 2015. [Google Scholar]
- Bengiamin, N.N.; Chan, W.C. Variable Structure Control of Electric Power Generation. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 376–380. [Google Scholar] [CrossRef]
- Aoki, M. Control of large-scale dynamic systems by aggregation. IEEE Trans. Autom. Control. 1968, 13, 246–253. [Google Scholar] [CrossRef]
- Yousef, H.A.; L-Kharusi, K.A.; Albadi, M.H.; Hosseinzadeh, N. Load Frequency Control of a Multi-Area Power System: An Adaptive Fuzzy Logic Approach. IEEE Trans. Power Syst. 2014, 29, 1822–1830. [Google Scholar] [CrossRef]
- Akula, S.K.; Salehfar, H. Frequency Control in Microgrid Communities Using Neural Networks. In Proceedings of the North American Power Symposium (NAPS), Wichita, KS, USA, 13–15 October 2019. [Google Scholar]
- Khamies, M.; Magdy, G.; Hussein, M.E.; Banakhr, F.A.; Kamel, S. An Efficient Control Strategy for Enhancing Frequency Stability of Multi-Area Power System Considering High Wind Energy Penetration. IEEE Access 2020, 8, 140062–140078. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Kamel, S.; Elsayed, S.K. Slime Mould Algorithm for Frequency Controller Design of a Two-area Thermal-PV Power System. In Proceedings of the 2021 IEEE International Conference on Automation/XXIV Congress of the Chilean Association of Automatic Control (ICA-ACCA), Valparaíso, Chile, 22–26 March 2021. [Google Scholar]
- Elkasem, A.H.A.; Khamies, M.; Magdy, G.; Taha, I.B.M.; Kamel, S. Frequency Stability of AC/DC Interconnected Power Systems with Wind Energy Using Arithmetic Optimization Algorithm-Based Fuzzy-PID Controller. Sustainability 2021, 13, 12095. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Ebeed, M.; Kamel, S. A robust PID controller based on linear quadratic gaussian approach for improving frequency stability of power systems considering renewables. ISA Trans. 2021, 117, 118–138. [Google Scholar] [CrossRef] [PubMed]
- Khamies, M.; Magdy, G.; Selim, A.; Kamel, S. An improved Rao algorithm for frequency stability enhancement of nonlinear power system interconnected by AC/DC links with high renewables penetration. Neural Comput. Appl. 2021, 34, 2883–2911. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, T.T.; Duong, M.Q.; Doan, A.T. Optimal operation of transmission power networks by using improved stochastic fractal search algorithm. Neural Comput. Appl. 2019, 32, 9129–9164. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.; Hansen, T.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.; Mitani, Y. Virtual Inertia Control Application to Enhance Frequency Stability of Interconnected Power Systems with High Renewable Energy Penetration. Energies 2018, 11, 981. [Google Scholar] [CrossRef] [Green Version]
- Kerdphol, T.; Rahman, F.S.; Watanabe, M.; Mitani, Y. Robust Virtual Inertia Control of a Low Inertia Microgrid Considering Frequency Measurement Effects. IEEE Access 2019, 7, 57550–57560. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.; Mitani, Y.; Hongesombut, K.; Küfeoğlu, S. Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration. Sustainability 2017, 9, 773. [Google Scholar] [CrossRef] [Green Version]
- Kerdphol, T.; Watanabe, M.; Hongesombut, K.; Mitani, Y. Self-Adaptive Virtual Inertia Control-Based Fuzzy Logic to Improve Frequency Stability of Microgrid With High Renewable Penetration. IEEE Access 2019, 7, 76071–76083. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Mitani, Y.; Watanabe, M.; Küfeoǧlu, S.K. Robust Virtual Inertia Control of an Islanded Microgrid Considering High Penetration of Renewable Energy. IEEE Access 2018, 6, 625–636. [Google Scholar] [CrossRef]
- Kim, H.; Kang, J.; Shim, J.W.; Beerten, J.; Van Hertem, D.; Jung, H.J.; Kim, C.K.; Hur, K. Exploiting Redundant Energy of MMC–HVDC to Enhance Frequency Response of Low Inertia AC Grid. IEEE Access 2019, 7, 138485–138494. [Google Scholar] [CrossRef]
- Shi, R.; Zhang, X.; Hu, C.; Xu, H.; Gu, J.; Cao, W. Self-tuning virtual synchronous generator control for improving frequency stability in autonomous photovoltaic-diesel microgrids. J. Mod. Power Syst. Clean Energy 2017, 6, 482–494. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Chen, G. Stability enhancement strategy of virtual synchronous generator for cascaded multilevel converter based energy storage system under weak grid conditions. IET Renew. Power Gener. 2020, 14, 695–704. [Google Scholar] [CrossRef]
- Leng, D.; Polmai, S. Virtual Synchronous Generator Based on Hybrid Energy Storage System for PV Power Fluctuation Mitigation. Appl. Sci. 2019, 9, 5099. [Google Scholar] [CrossRef] [Green Version]
- Rehman, H.U.; Yan, X.; Abdelbaky, M.A.; Jan, M.U.; Iqbal, S. An advanced virtual synchronous generator control technique for frequency regulation of grid-connected PV system. Int. J. Electr. Power Energy Syst. 2021, 125, 106440. [Google Scholar] [CrossRef]
- Ali, M.H.; Wu, B.; Dougal, R.A. An Overview of SMES Applications in Power and Energy Systems. IEEE Trans. Sustain. Energy 2010, 1, 38–47. [Google Scholar] [CrossRef]
- Kerdphol, T.; Watanabe, M.; Mitani, Y.; Phunpeng, V. Applying Virtual Inertia Control Topology to SMES System for Frequency Stability Improvement of Low-Inertia Microgrids Driven by High Renewables. Energies 2019, 12, 3902. [Google Scholar] [CrossRef] [Green Version]
- Alam, S.; Alotaibi, M.A.; Alam, M.A.; Hossain, M.; Shafiullah, M.; Al-Ismail, F.S.; Rashid, M.U.; Abido, M.A. High-Level Renewable Energy Integrated System Frequency Control with SMES-Based Optimized Fractional Order Controller. Electronics 2021, 10, 511. [Google Scholar] [CrossRef]
- Kumar, N.; Alotaibi, M.A.; Singh, A.; Malik, H.; Nassar, M.E. Application of Fractional Order-PID Control Scheme in Automatic Generation Control of a Deregulated Power System in the Presence of SMES Unit. Mathematics 2022, 10, 521. [Google Scholar] [CrossRef]
- Kalyan, N.S.; Rao, G.S. Stabilizing Frequency and Voltage in Combined LFC and AVR System with Coordinated Performance of SMES and TCSC. In Control Applications in Modern Power System; Springer: Singapore, 2020; pp. 65–76. [Google Scholar]
- Kalyan, N.S.; Goud, B.S.; Reddy, C.; Bajaj, M.; Sharma, N.K.; Alhelou, H.H.; Siano, P.; Kamel, S. Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System. Energies 2022, 5, 629. [Google Scholar] [CrossRef]
- Gozde, H.; Taplamacioglu, M.C.; Kocaarslan, I. Comparative performance analysis of Artificial Bee Colony algorithm in automatic generation control for interconnected reheat thermal power system. Electr. Power Energy Syst. 2012, 42, 167–178. [Google Scholar] [CrossRef]
- Hasanien, H.M. Whale optimisation algorithm for automatic generation control of interconnected modern power systems including renewable energy sources. IET Gener. Transm. Distrib. 2018, 12, 607–614. [Google Scholar] [CrossRef]
- Hasanien, H.M.; El-Fergany, A. Salp swarm algorithm-based optimal load frequency control of hybrid renewable power systems with communication delay and excitation cross-coupling effect. Electr. Power Syst. Res. 2019, 176, 1–10. [Google Scholar] [CrossRef]
- Hasanien, H.M.; El-Fergany, A.A. Symbiotic organisms search algorithm for automatic generation control of interconnected power systems including wind farms. IET Gener. Transm. Distrib. 2017, 11, 1692–1700. [Google Scholar] [CrossRef]
- Elmelegi, A.; Mohamed, E.A.; Aly, M.; Ahmed, E.M.; Mohamed, A.-A.A.; Elbaksawi, O. Optimized Tilt Fractional Order Cooperative Controllers for Preserving Frequency Stability in Renewable Energy-Based Power Systems. IEEE Access 2021, 9, 8261–8277. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Ahmed, E.M.; Elmelegi, A.; Aly, M.; Elbaksawi, O.; Mohamed, A.-A.A. An Optimized Hybrid Fractional Order Controller for Frequency Regulation in Multi-Area Power Systems. IEEE Access 2021, 8, 213899–213915. [Google Scholar] [CrossRef]
- Lotfy, M.; Senjyu, T.; Farahat, M.; Abdel-Gawad, A.; Yona, A. A Frequency Control Approach for Hybrid Power System Using Multi-Objective Optimization. Energies 2017, 10, 80. [Google Scholar] [CrossRef] [Green Version]
- Amrouche, S.O.; Rekioua, D.; Rekioua, T.; Bacha, S. Overview of energy storage in renewable energy systems. Int. J. Hydrog. Energy 2016, 41, 20914–20927. [Google Scholar] [CrossRef]
- Khosraviani, M.; Jahanshahi, M.; Farahani, M.; Bidaki, A.R.Z. Load–Frequency Control Using Multi-objective Genetic Algorithm and Hybrid Sliding Mode Control-Based SMES. Int. J. Fuzzy Syst. 2017, 20, 280–294. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995. [Google Scholar]
- Kaur, S.; Awasthi, L.K.; Sangal, A.L.; Dhiman, G. Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. In Engineering Applications of Artificial Intelligence; Elsevier BV: Amsterdam, The Netherlands, 2020; Volume 90, p. 103541. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Naruei, I.; Keynia, F. Wild horse optimizer: A new meta-heuristic algorithm for solving engineering optimization problems. In Engineering with Computers; Springer Science and Business Media LLC: Berlin, Germany, 2021. [Google Scholar]
- Abd-Elazim, S.M.; Ali, E.S. BFOA based design of PID controller for two area Load Frequency Control with nonlinearities. Electr. Power Energy Syst. 2013, 51, 224–231. [Google Scholar]
- Sahu, R.K.; Panda, S.; Padhan, S. A hybrid firefly algorithm and pattern search technique for automatic generation control of multi area power systems. Electr. Power Energy Syst. 2015, 64, 9–23. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | ISNS | SNS | TSA [50] | GWO [51] | WHO [52] | |
|---|---|---|---|---|---|---|
| F1 | Best | 9.21 × 10−38 | 1.03 × 10−28 | 3.79 × 10−8 | 6.34 × 10−12 | 5.08 × 10−21 |
| Mean | 4.39 × 10−37 | 1.37 × 10−27 | 4.64 × 10−7 | 3.13 × 10−11 | 2.13 × 10−18 | |
| Median | 2.66 × 10−37 | 4.77 × 10−28 | 1.17 × 10−7 | 2.43 × 10−11 | 6.47 × 10−19 | |
| Worst | 1.44 × 10−36 | 1.04 × 10−26 | 4.09 × 10−6 | 7.40 × 10−11 | 8.56 × 10−18 | |
| std | 4.35 × 10−37 | 2.38 × 10−27 | 1.15 × 10−6 | 2.26 × 10−11 | 2.98 × 10−18 | |
| F2 | Best | 8.57 × 10−20 | 2.3 × 10−15 | 2.44 × 10−6 | 1.42 × 10−7 | 4.13 × 10−13 |
| Mean | 2.95 × 10−19 | 5.64 × 10−15 | 1.9 × 10−5 | 2.77 × 10−7 | 1.3 × 10−10 | |
| Median | 2.72 × 10−19 | 4.21 × 10−15 | 1.86 × 10−5 | 2.66 × 10−7 | 5.29 × 10−11 | |
| Worst | 5.17 × 10−19 | 1.4 × 10−14 | 3.68 × 10−5 | 4.78 × 10−7 | 6.34 × 10−10 | |
| std | 1.28 × 10−19 | 3.51 × 10−15 | 9.44 × 10−6 | 9.9 × 10−8 | 1.77 × 10−10 | |
| F3 | Best | 8.11 × 10−26 | 9.18 × 10−13 | 0.027608 | 0.008462 | 5.13 × 10−13 |
| Mean | 1.5 × 10−23 | 4.18 × 10−08 | 1.122677 | 0.610441 | 1.2 × 10−8 | |
| Median | 3.82 × 10−24 | 4.13 × 10−09 | 0.772195 | 0.185412 | 6.29 × 10−11 | |
| Worst | 8.29 × 10−23 | 3.9 × 10−07 | 3.914695 | 3.567009 | 2.3 × 10−7 | |
| std | 2.22 × 10−23 | 9.17 × 10−08 | 1.096313 | 0.827115 | 5.14 × 10−8 | |
| F4 | Best | 3.51 × 10−18 | 1.33 × 10−13 | 0.67531 | 0.002608 | 5.11 × 10−9 |
| Mean | 8.52 × 10−18 | 5.45 × 10−13 | 3.616654 | 0.008 | 3.5 × 10−7 | |
| Median | 8.26 × 10−18 | 4.09 × 10−13 | 3.022253 | 0.007092 | 1 × 10−7 | |
| Worst | 1.53 × 10−18 | 1.87 × 10−12 | 9.361516 | 0.016667 | 2.14 × 10−6 | |
| std | 3.27 × 10−18 | 4.55 × 10−13 | 2.343658 | 0.003845 | 6.09 × 10−7 | |
| F5 | Best | 27.49147 | 27.6644 | 27.18973 | 25.92515 | 26.68451 |
| Mean | 27.95926 | 28.03399 | 39.01094 | 27.18903 | 37.10656 | |
| Median | 27.9314 | 27.97984 | 28.66203 | 27.09814 | 27.67985 | |
| Worst | 28.41631 | 28.44604 | 239.7785 | 28.79035 | 208.5133 | |
| std | 0.272732 | 0.216873 | 47.26339 | 0.72182 | 40.37046 | |
| F6 | Best | 0.09532 | 0.080879 | 2.886997 | 0.252254 | 0.013248 |
| Mean | 0.194232 | 0.292241 | 3.800719 | 0.647554 | 0.064784 | |
| Median | 0.188688 | 0.255115 | 3.736935 | 0.611378 | 0.058665 | |
| Worst | 0.348226 | 0.75842 | 4.850371 | 1.172757 | 0.16971 | |
| std | 0.075347 | 0.181696 | 0.527851 | 0.280888 | 0.043941 | |
| F7 | Best | 0.000159 | 0.000168 | 0.007604 | 0.001477 | 0.000605 |
| Mean | 0.000712 | 0.000708 | 0.019206 | 0.004433 | 0.001779 | |
| Median | 0.00051 | 0.000688 | 0.018479 | 0.003685 | 0.001387 | |
| Worst | 0.002648 | 0.002187 | 0.04436 | 0.01033 | 0.004938 | |
| std | 0.000612 | 0.000488 | 0.007628 | 0.002554 | 0.001255 | |
| F8 | Best | −11713.3 | −7613.49 | −1394.45 | −1495.31 | −1807.46 |
| Mean | −10512.5 | −6358.62 | −1212.82 | −1245.57 | −1721.44 | |
| Median | −10551.2 | −6324.46 | −1232.52 | −1224.18 | −1729.69 | |
| Worst | −9365.68 | −5562.96 | −976.635 | −1123.85 | −1630.81 | |
| std | 587.7064 | 538.2484 | 122.0762 | 104.0153 | 54.13894 | |
| F9 | Best | 0.00 | 0.00 | 156.667 | 1.062467 | 0.00 |
| Mean | 0.00 | 0.00 | 228.0177 | 9.801018 | 1.11 × 10−5 | |
| Median | 0.00 | 0.00 | 228.634 | 9.824713 | 1 × 10−9 | |
| Worst | 0.00 | 0.00 | 331.7581 | 24.96968 | 0.000177 | |
| std | 0.00 | 0.00 | 46.40919 | 5.565812 | 3.96 × 10−5 | |
| F10 | Best | 4.44 × 10−15 | 4.44 × 10−15 | 20.81133 | 20.76487 | 8.88 × 10−16 |
| Mean | 4.44 × 10−15 | 7.46 × 10−15 | 20.9608 | 20.92344 | 1.003597 | |
| Median | 4.44 × 10−15 | 6.22 × 10−15 | 20.99356 | 20.94465 | 7.99 × 10−6 | |
| Worst | 4.44 × 10−15 | 1.51 × 10−14 | 21.0961 | 21.06309 | 20.01369 | |
| std | 0.00 | 3.69 × 10−15 | 0.091505 | 0.083433 | 4.474524 | |
| F11 | Best | 0.00 | 0.00 | 1.3 × 10−9 | 6.56 × 10−13 | 0.00 |
| Mean | 0.00 | 0.00 | 0.007018 | 0.009891 | 1.83 × 10−16 | |
| Median | 0.00 | 0.00 | 1.44 × 10−8 | 4.55 × 10−12 | 0.00 | |
| Worst | 0.00 | 0.00 | 0.029126 | 0.055407 | 3.66 × 10−15 | |
| std | 0.00 | 0.00 | 0.010243 | 0.015766 | 8.19 × 10−16 | |
| F12 | Best | 0.000362 | 0.000696 | 0.374956 | 0.006066 | 4.64 × 10−5 |
| Mean | 0.001204 | 0.00268 | 2.805889 | 0.026151 | 0.026544 | |
| Median | 0.000948 | 0.00284 | 2.009833 | 0.023474 | 0.000309 | |
| Worst | 0.00325 | 0.004893 | 7.656863 | 0.047176 | 0.207386 | |
| std | 0.000792 | 0.001232 | 2.128936 | 0.013414 | 0.056802 | |
| F13 | Best | 0.00346 | 0.057519 | 2.372295 | 0.09955 | 0.011802 |
| Mean | 0.033894 | 0.154385 | 3.298085 | 0.613832 | 0.173897 | |
| Median | 0.029259 | 0.140323 | 3.22876 | 0.609981 | 0.136817 | |
| Worst | 0.069341 | 0.378672 | 4.16073 | 1.044 | 0.700833 | |
| std | 0.020599 | 0.077659 | 0.565835 | 0.280029 | 0.157716 | |
| F14 | Best | 0.998004 | 0.998004 | 0.998004 | 0.998004 | 0.998004 |
| Mean | 0.998004 | 0.998004 | 8.298683 | 3.892106 | 1.097209 | |
| Median | 0.998004 | 0.998004 | 10.76318 | 2.982105 | 0.998004 | |
| Worst | 0.998004 | 0.998004 | 18.30431 | 12.67051 | 2.982105 | |
| std | 0.00 | 1.02 × 10−16 | 5.533952 | 3.727681 | 0.443659 | |
| F15 | Best | 0.000307 | 0.000308 | 0.000308 | 0.00031 | 0.000307 |
| Mean | 0.000307 | 0.00035 | 0.007136 | 0.003547 | 0.000602 | |
| Median | 0.000307 | 0.000313 | 0.000505 | 0.000546 | 0.000593 | |
| Worst | 0.000307 | 0.000582 | 0.031699 | 0.020363 | 0.001223 | |
| std | 1.99 × 10−19 | 6.8 × 10−5 | 0.010606 | 0.007255 | 0.000286 | |
| F16 | Best | −1.03163 | −1.03163 | −1.03163 | −1.03163 | −1.03163 |
| Mean | −1.03163 | −1.03163 | −1.0253 | −1.03158 | −1.03163 | |
| Median | −1.03163 | −1.03163 | −1.03163 | −1.03163 | −1.03163 | |
| Worst | −1.03163 | −1.03163 | −0.99999 | −1.03063 | −1.03163 | |
| std | 2.22 × 10−16 | 1.53 × 10−16 | 0.012981 | 0.000223 | 5.09 × 10−17 | |
| F17 | Best | 0.397887 | 0.397887 | 0.39789 | 0.397888 | 0.397887 |
| Mean | 0.397887 | 0.397887 | 0.397927 | 0.397891 | 0.397887 | |
| Median | 0.397887 | 0.397887 | 0.397907 | 0.397891 | 0.397887 | |
| Worst | 0.397887 | 0.397887 | 0.398082 | 0.397897 | 0.397887 | |
| std | 0.00 | 0.00 | 4.53 × 10−5 | 3.01 × 10−6 | 0.00 | |
| F18 | Best | 3.00 | 3.00 | 3.000009 | 3.00 | 3.00 |
| Mean | 3.00 | 3.00 | 8.400078 | 3.000068 | 3.00 | |
| Median | 3.00 | 3.00 | 3.000084 | 3.000036 | 3.00 | |
| Worst | 3.00 | 3.00 | 84.00001 | 3.000238 | 3.00 | |
| std | 1.17 × 10−15 | 1.6 × 10−15 | 18.78799 | 6.53 × 10−5 | 1.13 × 10−15 | |
| F19 | Best | −3.86278 | −3.86278 | −0.30048 | −0.30048 | −0.30048 |
| Mean | −3.86278 | −3.86278 | −0.30048 | −0.30048 | −0.30048 | |
| Median | −3.86278 | −3.86278 | −0.30048 | −0.30048 | −0.30048 | |
| Worst | −3.86278 | −3.86278 | −0.30048 | −0.30048 | −0.30048 | |
| std | 2.28 × 10−15 | 2.22 × 10−15 | 1.14 × 10−16 | 1.14 × 10−16 | 1.14 × 10−16 | |
| F20 | Best | −3.322 | −3.322 | −3.32148 | −3.32198 | −3.322 |
| Mean | −3.2566 | −3.29822 | −3.07223 | −3.22876 | −3.21756 | |
| Median | −3.2031 | −3.322 | −3.20118 | −3.26239 | −3.322 | |
| Worst | −3.2031 | −3.2031 | −0.20816 | −2.84039 | −2.43178 | |
| std | 0.060685 | 0.048793 | 0.679321 | 0.125558 | 0.239908 | |
| F21 | Best | −10.1532 | −10.1532 | −10.0895 | −10.1502 | −10.1532 |
| Mean | −10.1532 | −10.1532 | −5.89545 | −8.51218 | −9.77706 | |
| Median | −10.1532 | −10.1532 | −4.90994 | −10.1413 | −10.1532 | |
| Worst | −10.1532 | −10.1532 | −2.58642 | −2.62918 | −2.63047 | |
| std | 3.21 × 10−15 | 2.8 × 10−12 | 2.775111 | 2.963153 | 1.682133 | |
| F22 | Best | −10.4029 | −10.4029 | −10.3637 | −10.4024 | −10.4029 |
| Mean | −10.4029 | −10.4029 | −7.02119 | −10.0134 | −9.75463 | |
| Median | −10.4029 | −10.4029 | −9.8942 | −10.3959 | −10.4029 | |
| Worst | −10.4029 | −10.4029 | −1.82478 | −2.76526 | −2.75193 | |
| std | 3.36 × 10−15 | 5.02 × 10−15 | 3.57071 | 1.706042 | 2.031123 | |
| F23 | Best | −10.5364 | −10.5364 | −10.4599 | −10.5348 | −10.5364 |
| Mean | −10.5364 | −10.5364 | −5.50502 | −9.74305 | −10.5364 | |
| Median | −10.5364 | −10.5364 | −2.83596 | −10.5274 | −10.5364 | |
| Worst | −10.5364 | −10.5364 | −1.66783 | −2.42135 | −10.5364 | |
| std | 4.12 × 10−8 | 2 × 10−15 | 3.728197 | 2.418464 | 1.58 × 10−15 | |
| Controller | Area | N | |||
|---|---|---|---|---|---|
| PID based SNS | area-1 | 0.6329 | 0.7154 | 0.3378 | 100 |
| area-2 | 0.4078 | 0.0094 | 0.36685 | 100 | |
| PID based ISNS | area-1 | 0.9998 | 0.7193 | 0.5346 | 100 |
| area-2 | 0.0230 | 0.0001 | 0.3335 | 100 |
| Controller | Objective Function Value (ITAE) |
|---|---|
| PID based ZN [53] | 0.6040 |
| PID based GA [53] | 0.5513 |
| PID based BFOA [53] | 0.4788 |
| PID based FA [54] | 0.3240 |
| PID based hFA-PS [54] | 0.2789 |
| PID based SNS | 0.19248 |
| PID based ISNS | 0.18951 |
| PID Area | N | |||
|---|---|---|---|---|
| PID for area1 | 9.97724 | 3.8356 | 7.25243 | 99.0354 |
| PID for area2 | 9.99972 | 9.73073 | 2.94446 | 99.2726 |
| Source | Area | Start Time (s) | End Time (s) |
|---|---|---|---|
| Solar farm-1 | Area-1 | 20 | 100 |
| wind farm-1 | Area-1 | 40 | 100 |
| Solar farm-2 | Area-2 | 60 | 100 |
| wind farm-2 | Area-2 | 80 | 100 |
| Load disturbance | Area-1 | 10 | 100 |
| Control Strategy | Parameters | Area-1 | Area-2 |
|---|---|---|---|
| Optimal VIC based ESS devices | 3 | 3 | |
| Optimal VIC based SMES technology | 1.3580 | 0.1759 | |
| 0.0216 | 0.0150 | ||
| 0.1152 | 1.6677 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khamies, M.; Kamel, S.; Hassan, M.H.; Elnaggar, M.F. A Developed Frequency Control Strategy for Hybrid Two-Area Power System with Renewable Energy Sources Based on an Improved Social Network Search Algorithm. Mathematics 2022, 10, 1584. https://doi.org/10.3390/math10091584
Khamies M, Kamel S, Hassan MH, Elnaggar MF. A Developed Frequency Control Strategy for Hybrid Two-Area Power System with Renewable Energy Sources Based on an Improved Social Network Search Algorithm. Mathematics. 2022; 10(9):1584. https://doi.org/10.3390/math10091584
Chicago/Turabian StyleKhamies, Mohamed, Salah Kamel, Mohamed H. Hassan, and Mohamed F. Elnaggar. 2022. "A Developed Frequency Control Strategy for Hybrid Two-Area Power System with Renewable Energy Sources Based on an Improved Social Network Search Algorithm" Mathematics 10, no. 9: 1584. https://doi.org/10.3390/math10091584