
A Hybrid Arithmetic Optimization and Golden Sine Algorithm for Solving Industrial Engineering Design Problems




Abstract
:1. Introduction
- We propose a new hybrid algorithm based on the Arithmetic Optimization Algorithm and Golden Sine Algorithm (HAGSA).
- Levy flight and a new mechanism called Brownian mutation are carried out to enhance the exploration and exploitation ability of the hybrid algorithm.
- The performance of the proposed work is assessed on the CEC 2014 competition test suite and five classical engineering design problems.
- Several well-known MAs are compared with the proposed method.
- Experimental results indicate that HAGSA has more reliable performance than that of other well-known algorithms.
2. Preliminaries
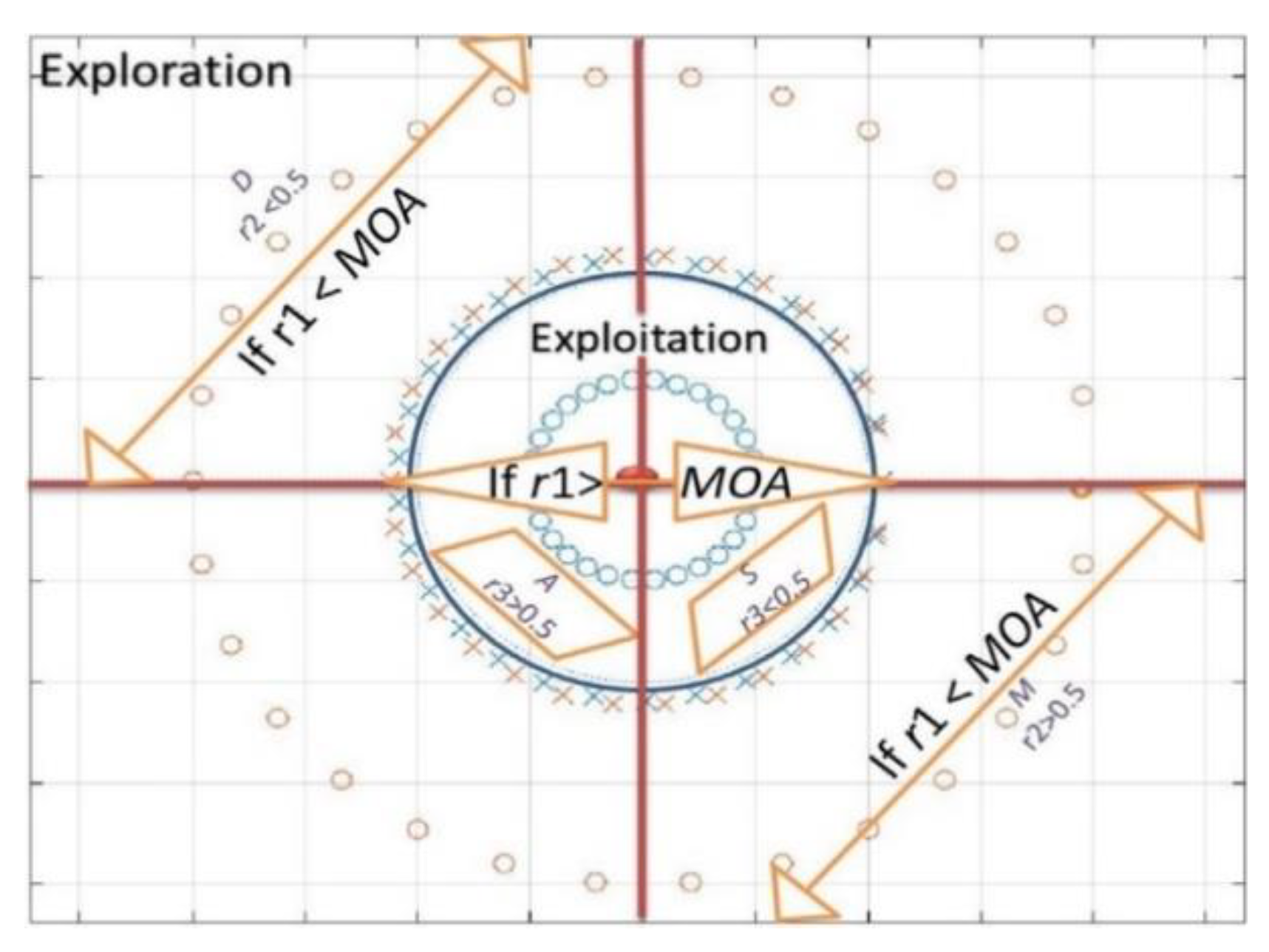
2.1. Arithmetic Optimization Algorithm (AOA)
2.1.1. Initialization Phase
2.1.2. Exploration Phase
2.1.3. Exploitation Phase
| Algorithm 1 pseudo-code of AOA [33] |
|
2.2. Golden Sine Algorithm (Gold-SA)
| Algorithm 2 pseudo-code of Gold-SA [27] |
|
3. The Proposed Algorithm
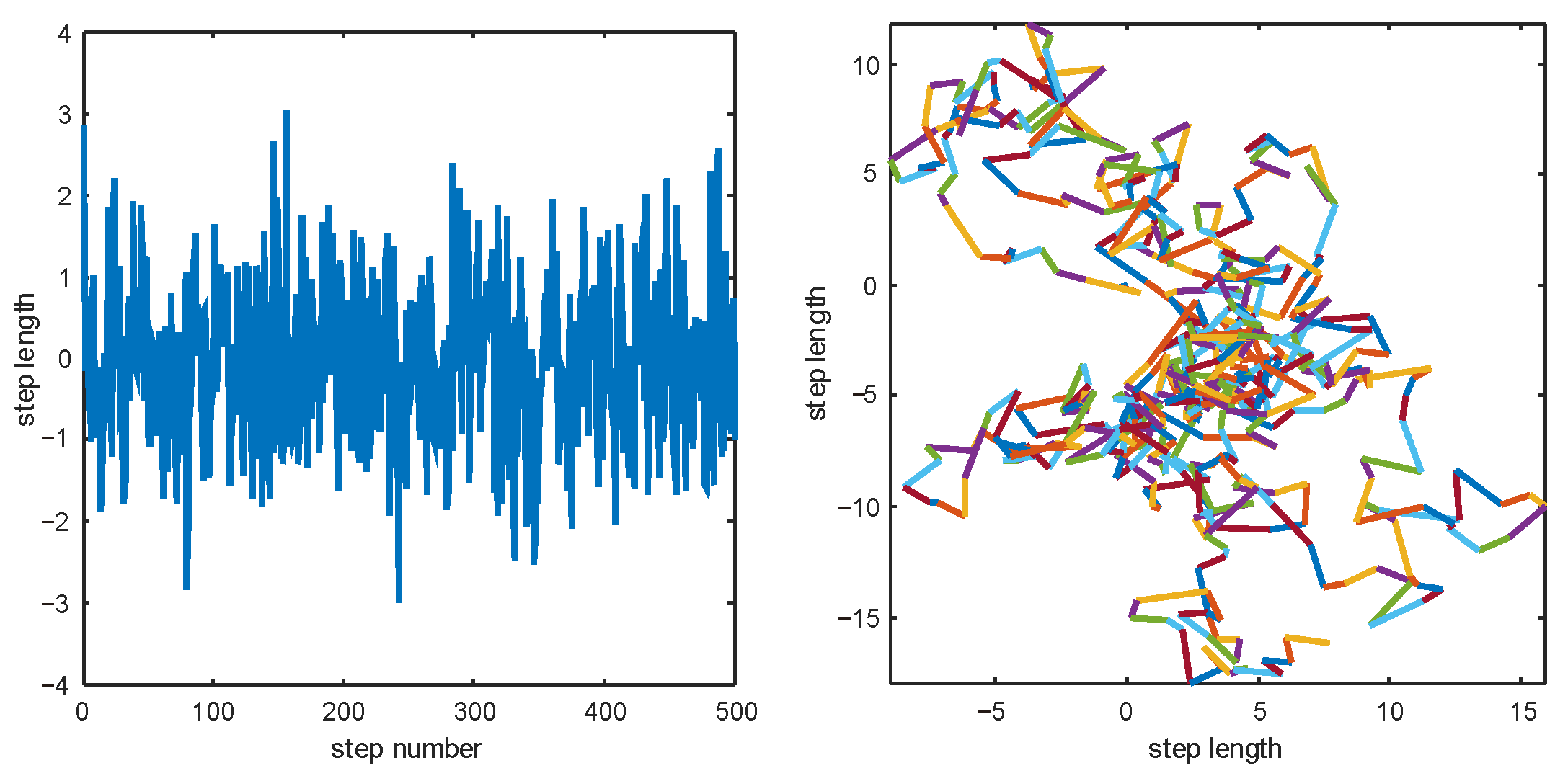
3.1. Levy Flight
3.2. Brownian Mutation
3.3. The Details of HAGSA
| Algorithm 3 pseudo-code of HAGSA |
|
3.4. Computational Complexity Analysis
4. Experimental Results and Discussion
4.1. Definition of CEC 2014 Benchmark Functions
4.2. Experimental Setup
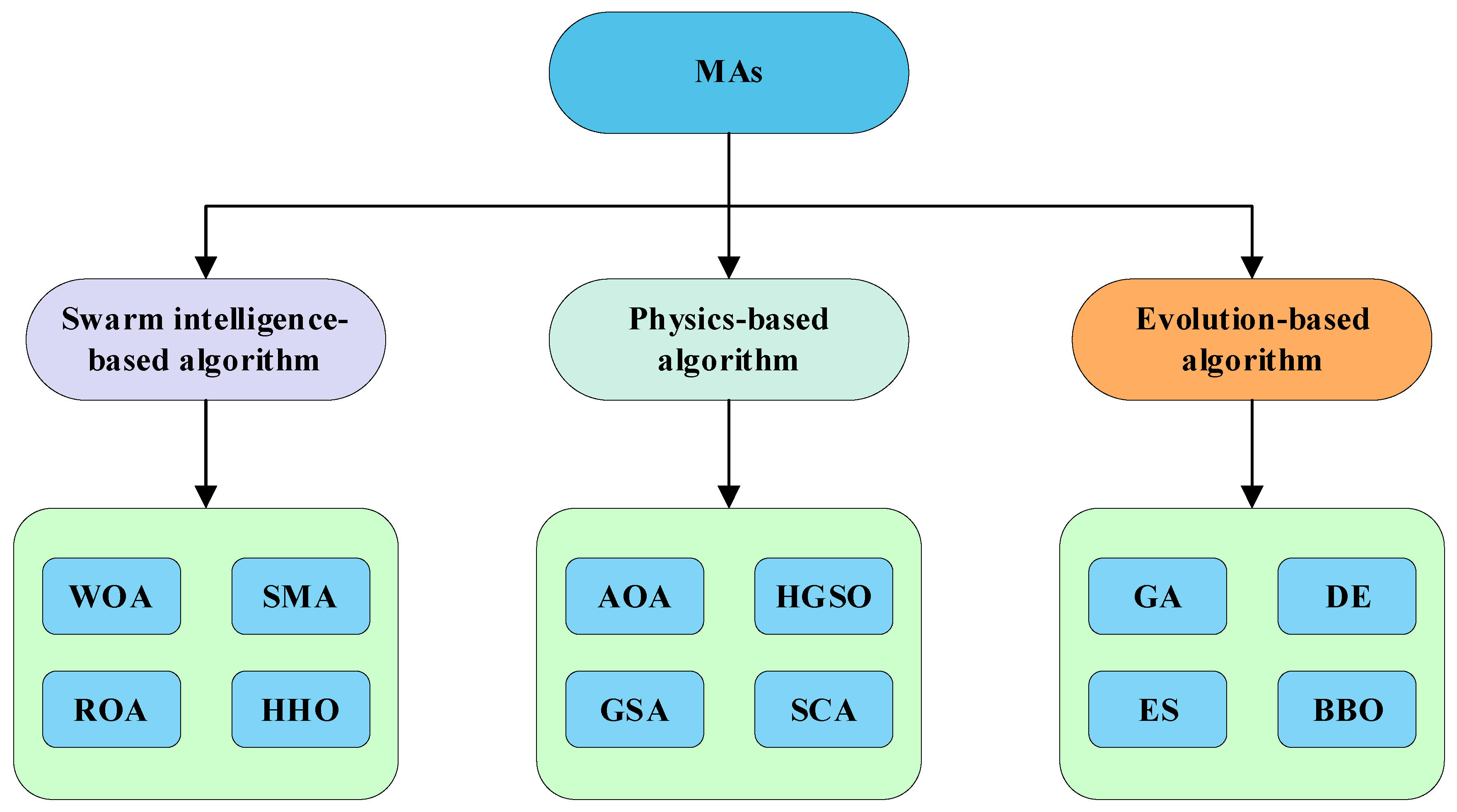
- AOA: simulates four commonly used arithmetic operators as Division (÷), Multiplication (×), Subtraction (−), and Addition (+).
- Gold-SA: inspired by the sine function with the golden section search in mathematics compute.
- ROA: simulates remora’s parasitism behavior on different hosts including whales and swordfish during the hunting process.
- AO: inspired by Aquila’s four different hunting methods.
- SCA: simulates the distribution characteristics of sine and cosine functions.
- WOA: simulates the hunting behavior of humpback whales in oceans.
- FPA: simulates the pollination process of flowering plants in nature.
- DE: integrates the differential mutation, crossover, and selection mechanisms.
- GA: mimics the Darwinian evolution law and biological evolution of genetic mechanism in nature.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameters |
|---|---|
| AOA [26] | α = 5; μ = 0.5; |
| Gold-SA [27] | c1 = [1, 0]; c2 ∈ [0, 1]; c3 ∈ [0, 1] |
| ROA [45] | C = 0.1 |
| AO [23] | U = 0.00565; r1 = 10; ω = 0.005; α = 0.1; δ = 0.1; |
| SCA [25] | a ∈ [2, 0] |
| WOA [14] | a1 ∈ [2, 0]; a2 ∈ [−1, −2]; b = 1 |
| FPA [46] | p = 0.8; β = 1.5 |
| DE [8] | Fmin = 0.2; Fmax = 0.8; CR = 0.1 |
| GA [47] | Pc = 0.85; Pm = 0.01 |
4.3. Statistical Results on CEC 2014 Benchmark Functions
4.4. Boxplot Behavior Analysis
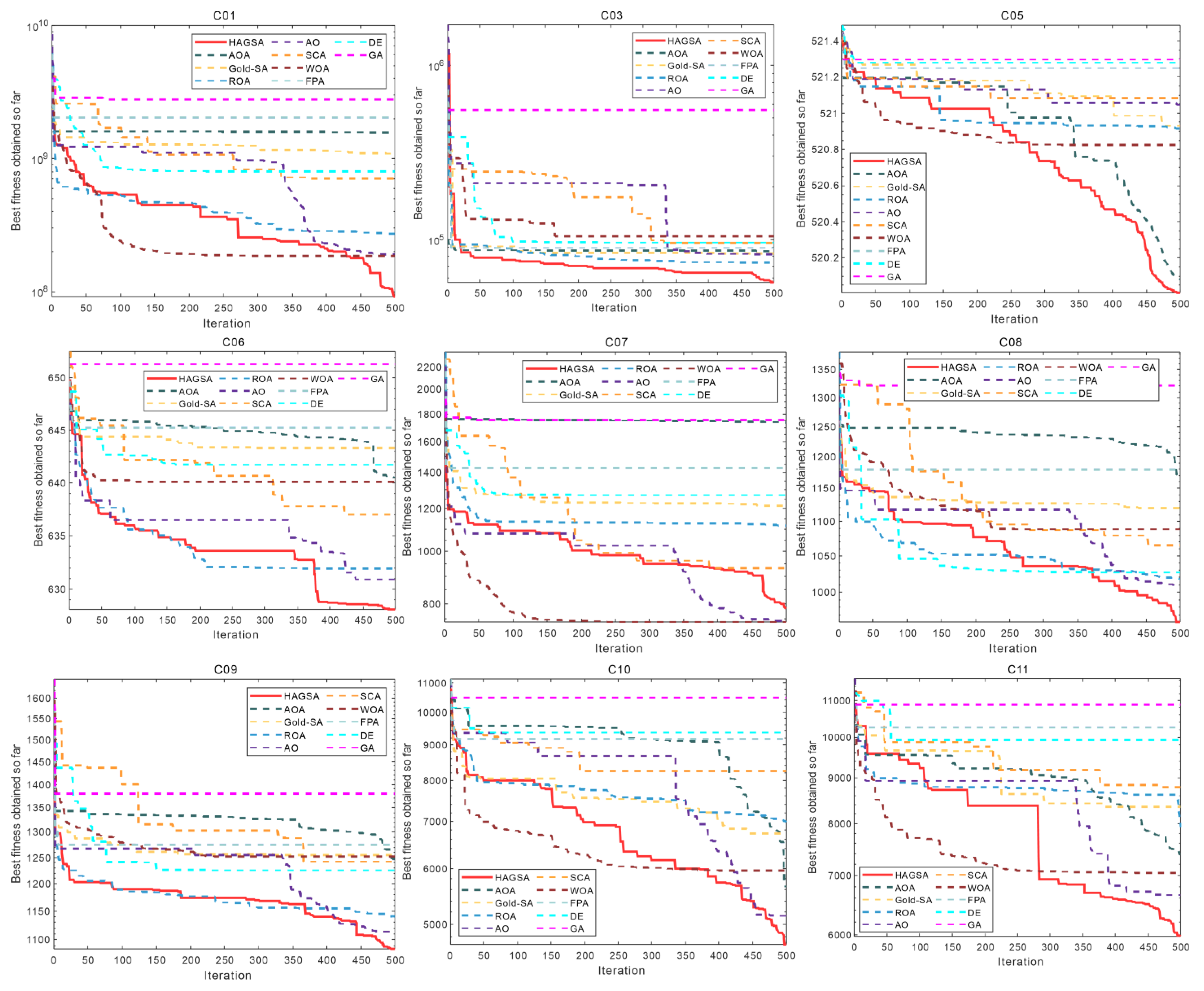
4.5. Convergence Behavior Analysis
4.6. Wilcoxon Rank-Sum Test
4.7. Computational Time Analysis
4.8. Industrial Engineering Design Problems
4.8.1. Car Side Crash Design Problem
4.8.2. Pressure Vessel Design Problem

4.8.3. Tension Spring Design Problem

4.8.4. Speed Reducer Design Problem

4.8.5. Cantilever Beam Design

5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Esparza, E.R.; Calzada, L.A.Z.; Oliva, D.; Heidari, A.A.; Zaldivar, D.; Cisneros, M.P.; Foong, L.K. An efficient harris hawks-inspired image segmentation method. Expert Syst. Appl. 2020, 155, 113428. [Google Scholar] [CrossRef]
- Liu, Q.; Li, N.; Jia, H.; Qi, Q.; Abualigah, L. Modified remora optimization algorithm for global optimization and multilevel thresholding image segmentation. Mathematics 2022, 10, 1014. [Google Scholar] [CrossRef]
- Ewees, A.A.; Abualigah, L.; Yousri, D.; Sahlol, A.T.; Al-qaness, A.A.; Alshathri, S.; Elaziz, M.A. Modified artificial ecosystem-based optimization for multilevel thresholding image segmentation. Mathematics 2021, 9, 2363. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Q.; Liu, Y.; Jia, H.; Liu, L.; Zheng, R.; Wu, D. A hybrid SSA and SMA with mutation opposition-based learning for constrained engineering problems. Comput. Intell. Neurosci. 2021, 2021, 6379469. [Google Scholar] [CrossRef] [PubMed]
- Houssein, E.H.; Mahdy, M.A.; Blondin, M.J.; Shebl, D.; Mohamed, W.M. Hybrid slime mould algorithm with adaptive guided differential evolution algorithm for combinatorial and global optimization problems. Expert Syst. Appl. 2021, 174, 114689. [Google Scholar] [CrossRef]
- Wang, S.; Jia, H.; Liu, Q.; Zheng, R. An improved hybrid aquila optimizer and harris hawks optimization for global optimization. Math. Biosci. Eng. 2021, 18, 7076–7109. [Google Scholar] [CrossRef]
- Wu, D.; Wang, S.; Liu, Q.; Abualigah, L.; Jia, H. An Improved Teaching-Learning-Based Optimization Algorithm with Reinforcement Learning Strategy for Solving Optimization Problems. Comput. Intell. Neurosci. 2022, 2022, 1535957. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Z.; Chen, W.; Heidari, A.A.; Wang, M.; Zhao, X.; Liang, G.; Chen, H.; Zhang, X. Ensemble mutation-driven salp swarm algorithm with restart mechanism: Framework and fundamental analysis. Expert Syst. Appl. 2021, 165, 113897. [Google Scholar] [CrossRef]
- Giovanni, L.D.; Pezzella, F. An improved genetic algorithm for the distributed and flexible Job-shop scheduling problem. Eur. J. Oper. Res. 2010, 200, 395–408. [Google Scholar] [CrossRef]
- Wu, B.; Zhou, J.; Ji, X.; Yin, Y.; Shen, X. An ameliorated teaching–learning-based optimization algorithm based study of image segmentation for multilevel thresholding using Kapur’s entropy and Otsu’s between class variance. Inf. Sci. 2020, 533, 72–107. [Google Scholar] [CrossRef]
- Wang, S.; Jia, H.; Abualigah, L.; Liu, Q.; Zheng, R. An improved hybrid aquila optimizer and harris hawks algorithm for solving industrial engineering optimization problems. Processes 2021, 9, 1551. [Google Scholar] [CrossRef]
- Lin, S.; Jia, H.; Abualigah, L.; Altalhi, M. Enhanced slime mould algorithm for multilevel thresholding image segmentation using entropy measures. Entropy 2021, 23, 1700. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Zhao, D.; Yu, F.; Heidari, A.A.; Zhang, Y.; Chen, H.; Li, C.; Pan, J.; Quan, S. Horizontal and vertical search artificial bee colony for image segmentation of COVID-19 X-ray images. Comput. Biol. Med. 2021, 142, 105181. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Khare, A.; Rangnekar, S. A review of particle swarm optimization and its applications in solar photovoltaic system. Appl. Soft Comput. 2013, 13, 2997–3006. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl. Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Abualigah, L.; Elaziz, M.A.; Sumari, P.; Geem, Z.; Gandomi, A.H. Reptile search algorithm (RSA): A nature-inspired meta-heuristic optimizer. Expert Syst. Appl. 2022, 191, 116158. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Abd, E.M.; Ewees, A.A. Aquila optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2015, 27, 495–513. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Elaziz, A.E.; Gandomi, A.H. The arithmetic optimization algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Tanyildizi, E.; Demir, G. Golden sine algorithm: A novel math-inspired algorithm. Golden sine algorithm: A novel math-inspired algorithm. Adv. Electr. Comput. Eng. 2017, 17, 71–78. [Google Scholar] [CrossRef]
- Neggaz, N.; Houssein, E.H.; Hussain, K. An efficient henry gas solubility optimization for feature selection. Expert Syst. Appl. 2020, 152, 113364. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Sun, P.; Liu, H.; Zhang, Y.; Meng, Q.; Tu, L.; Zhao, J. An improved atom search optimization with dynamic opposite learning and heterogeneous comprehensive learning. Appl. Soft Comput. 2021, 103, 107140. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl.-Based Syst. 2021, 191, 105190. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Simon, D. Biogeography-based optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Slowik, A.; Kwasnicka, H. Evolutionary algorithms and their applications to engineering problems. Neural Comput. Appl. 2020, 32, 12363–12379. [Google Scholar] [CrossRef] [Green Version]
- Hansen, N.; Ostermeier, A. Completely Derandomized Self-Adaptation in Evolution Strategies. Evol. Comput. 2001, 9, 159–195. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Azizi, M.; Talatahari, S. Improved arithmetic optimization algorithm for design optimization of fuzzy controllers in steel building structures with nonlinear behavior considering near fault ground motion effects. Artif. Intell. Rev. 2021. [Google Scholar] [CrossRef]
- Agushaka, J.O.; Ezugwu, A.E. Advanced arithmetic optimization algorithm for solving mechanical engineering design problems. PLoS ONE 2021, 16, 0255703. [Google Scholar] [CrossRef]
- Wang, R.; Wang, W.; Xu, L.; Pan, J.; Chu, S. An adaptive parallel arithmetic optimization algorithm for robot path planning. J. Adv. Transport. 2021, 2021, 3606895. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Sumari, P.; Gandomi, A.H. A novel evolutionary arithmetic optimization algorithm for multilevel thresholding segmentation of COVID-19 CT images. Processes 2021, 9, 1155. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, B. A novel ant colony optimization algorithm with Levy flight. IEEE Access 2020, 8, 67205–67213. [Google Scholar] [CrossRef]
- Iacca, G.; Junior, V.C.S.; Melo, V.V. An improved jaya optimization algorithm with Levy flight. Expert Syst. Appl. 2021, 165, 113902. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Li, M.; Zhao, H.; Weng, X.; Han, T. A novel nature-inspired algorithm for optimization: Virus colony search. Adv. Eng. Softw. 2016, 92, 65–88. [Google Scholar] [CrossRef]
- Jia, H.; Peng, X.; Lang, C. Remora optimization algorithm. Expert Syst. Appl. 2021, 185, 115665. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, R.; Luo, Q. Elite opposition-based flower pollination algorithm. Neurocomputing 2016, 188, 294–310. [Google Scholar] [CrossRef]
- Ewees, A.A.; Elaziz, M.A.; Houssein, E.H. Improved grasshopper optimization algorithm using opposition-based learning. Expert Syst. Appl. 2018, 112, 156–172. [Google Scholar] [CrossRef]
- Yildiz, B.S.; Pholdee, N.; Bureerat, S.; Yildiz, A.R.; Sait, S.M. Enhanced grasshopper optimization algorithm using elite opposition-based learning for solving real-world engineering problems. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Houssein, E.H.; Helmy, B.E.; Rezk, H.; Nassef, A.M. An efficient orthogonal opposition-based learning slime mould algorithm for maximum power point tracking. Neural Comput. Appl. 2022, 34, 3671–3695. [Google Scholar] [CrossRef]
- Taheri, A.; Rahimizadeh, K.; Rao, R.V. An efficient balanced teaching-learning-based optimization algorithm with individual restarting strategy for solving global optimization problems. Inf. Sci. 2021, 576, 68–104. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Heidari, A.A.; Gandomi, A.H.; Chu, X.; Chen, H. RUN beyond the metaphor: An efficient optimization algorithm based on runge kutta method. Expert Syst. Appl. 2021, 181, 115079. [Google Scholar] [CrossRef]
- Cheng, Z.; Song, H.; Wang, J.; Zhang, H.; Chang, T.; Zhang, M. Hybrid firefly algorithm with grouping attraction for constrained optimization problem. Knowl. Based Syst. 2021, 220, 106937. [Google Scholar] [CrossRef]











| Function Types | No. | Name of the Function | D | Range | fmin |
|---|---|---|---|---|---|
| Unimodal | C01 | Rotated High Conditioned Elliptic Function | 30 | [−100, 100] | 100 |
| C02 | Rotated Bent Cigar Function | 30 | [−100, 100] | 200 | |
| C03 | Rotated Discus Function | 30 | [−100, 100] | 300 | |
| Multimodal | C04 | Shifted and Rotated Rosenbrock Function | 30 | [−100, 100] | 400 |
| C05 | Shifted and Rotated Ackley Function | 30 | [−100, 100] | 500 | |
| C06 | Shifted and Rotated Weierstrass Function | 30 | [−100, 100] | 600 | |
| C07 | Shifted and Rotated Griewank Function | 30 | [−100, 100] | 700 | |
| C08 | Shifted Rastrigin Function | 30 | [−100, 100] | 800 | |
| C09 | Shifted and Rotated Rastrigin Function | 30 | [−100, 100] | 900 | |
| C10 | Shifted Schwefel Function | 30 | [−100, 100] | 1000 | |
| C11 | Shifted and Rotated Schwefel Function | 30 | [−100, 100] | 1100 | |
| C12 | Shifted and Rotated Katsuura Function | 30 | [−100, 100] | 1200 | |
| C13 | Shifted and Rotated HappyCat Function | 30 | [−100, 100] | 1300 | |
| C14 | Shifted and Rotated HGBat Function | 30 | [−100, 100] | 1400 | |
| C15 | Shifted and Rotated Expanded Griewank plus Rosenbrock Function | 30 | [−100, 100] | 1500 | |
| Hybrid | C16 | Shifted and Rotated Expanded Scaffer F6 Function | 30 | [−100, 100] | 1600 |
| C17 | Hybrid Function 1(N = 3) | 30 | [−100, 100] | 1700 | |
| C18 | Hybrid Function 2(N = 3) | 30 | [−100, 100] | 1800 | |
| C19 | Hybrid Function 3(N = 4) | 30 | [−100, 100] | 1900 | |
| C20 | Hybrid Function 4(N = 4) | 30 | [−100, 100] | 2000 | |
| C21 | Hybrid Function 5(N = 5) | 30 | [−100, 100] | 2100 | |
| C22 | Hybrid Function 6(N = 5) | 30 | [−100, 100] | 2200 | |
| Composition | C23 | Composition Function 1(N = 5) | 30 | [−100, 100] | 2300 |
| C24 | Composition Function 2(N = 3) | 30 | [−100, 100] | 2400 | |
| C25 | Composition Function 3(N = 3) | 30 | [−100, 100] | 2500 | |
| C26 | Composition Function 4(N = 5) | 30 | [−100, 100] | 2600 | |
| C27 | Composition Function 5(N = 5) | 30 | [−100, 100] | 2700 | |
| C28 | Composition Function 6(N = 5) | 30 | [−100, 100] | 2800 | |
| C29 | Composition Function 7(N = 3) | 30 | [−100, 100] | 2900 | |
| C30 | Composition Function 8(N = 3) | 30 | [−100, 100] | 3000 |
| Function | HAGSA | AOA | Gold-SA | ROA | AO | SCA | WOA | FPA | DE | GA | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| C01 | Mean | 1.94 × 108 | 1.08 × 109 | 6.73 × 108 | 3.59 × 108 | 7.85 × 108 | 5.11 × 108 | 1.97 × 109 | 4.63 × 108 | 5.30 × 109 | 2.77 × 109 |
| Std | 7.50 × 107 | 3.49 × 108 | 2.21 × 108 | 1.63 × 108 | 3.92 × 107 | 1.26 × 108 | 3.25 × 108 | 1.97 × 108 | 2.23 × 108 | 1.07 × 108 | |
| C02 | Mean | 2.40 × 1010 | 6.81 × 1010 | 6.18 × 1010 | 6.80 × 1010 | 6.83 × 1010 | 2.93 × 1010 | 8.59 × 1010 | 6.99 × 1010 | 5.09 × 1010 | 1.03 × 1011 |
| Std | 7.78 × 109 | 1.18 × 1010 | 9.47 × 109 | 7.53 × 109 | 1.27 × 109 | 5.26 × 109 | 7.45 × 109 | 2.39 × 109 | 1.02 × 1010 | 0.00 | |
| C03 | Mean | 8.55 × 104 | 8.19 × 104 | 8.73 × 104 | 6.60 × 104 | 8.72 × 104 | 7.58 × 104 | 9.20 × 104 | 1.26 × 105 | 7.01 × 104 | 1.42 × 107 |
| Std | 2.10 × 103 | 6.52 × 103 | 2.50 × 103 | 7.55 × 103 | 7.66 × 103 | 1.61 × 104 | 1.22 × 104 | 6.25 × 104 | 1.56 × 104 | 1.25 × 104 | |
| C04 | Mean | 1.45 × 104 | 1.05 × 104 | 1.27 × 104 | 2.54 × 103 | 1.40 × 104 | 2.57 × 103 | 1.73 × 104 | 1.74 × 103 | 6.37 × 103 | 2.58 × 104 |
| Std | 7.37 × 102 | 2.84 × 103 | 3.47 × 103 | 1.17 × 103 | 1.95 × 102 | 6.06 × 102 | 2.18 × 103 | 3.95 × 102 | 2.59 × 103 | 5.19 × 102 | |
| C05 | Mean | 5.20 × 102 | 5.21 × 102 | 5.21 × 102 | 5.21 × 102 | 5.21 × 102 | 5.21 × 102 | 5.21 × 102 | 5.21 × 102 | 5.21 × 102 | 5.21 × 102 |
| Std | 8.39 × 102 | 8.06 × 102 | 7.03 × 102 | 1.07 × 10−1 | 8.92 × 10−2 | 7.53 × 10−2 | 8.15 × 10−2 | 8.17 × 10−2 | 6.61 × 10−2 | 8.05 × 10−2 | |
| C06 | Mean | 6.17 × 102 | 6.38 × 102 | 6.42 × 102 | 6.35 × 102 | 6.42 × 102 | 6.39 × 102 | 6.45 × 102 | 6.39 × 102 | 6.34 × 102 | 6.50 × 102 |
| Std | 3.56 | 2.45 | 2.42 | 3.07 | 2.76 | 1.97 | 1.43 | 2.82 | 2.63 | 2.05 | |
| C07 | Mean | 1.47 × 103 | 1.34 × 103 | 1.13 × 103 | 9.16 × 102 | 1.19 × 103 | 9.50 × 102 | 1.56 × 103 | 7.41 × 102 | 1.16 × 103 | 1.75 × 103 |
| Std | 7.04 × 10 | 1.06 × 102 | 9.78 × 10 | 9.09 × 10 | 1.24 × 10 | 3. × 10 | 6.79 × 10 | 1.56 × 10 | 1.12 × 102 | 7.10 × 10 | |
| C08 | Mean | 1.09 × 103 | 1.14 × 103 | 1.12 × 103 | 1.13 × 103 | 1.13 × 103 | 1.19 × 103 | 1.18 × 103 | 1.13 × 103 | 1.08 × 103 | 1.31 × 103 |
| Std | 2.42 × 10 | 3.04 × 10 | 3.10 × 10 | 2.57 × 10 | 2.02 × 10 | 2.22 × 10 | 1.37 × 10 | 4.63 × 10 | 2.32 × 10 | 2.23 × 10 | |
| C09 | Mean | 1.14 × 103 | 1.22 × 103 | 1.26 × 103 | 1.37 × 103 | 1.26 × 103 | 1.22 × 103 | 1.29 × 103 | 1.20 × 103 | 1.20 × 103 | 1.38 × 103 |
| Std | 1.65 × 10 | 2.17 × 10 | 2.71 × 10 | 2.23 × 10 | 1.89 × 10 | 2.49 × 10 | 1.67 × 10 | 5.07 × 10 | 2.70 × 10 | 2.31 × 10−13 | |
| C10 | Mean | 6.12 × 103 | 7.26 × 103 | 8.04 × 103 | 6.34 × 103 | 8.16 × 103 | 7.97 × 103 | 9.45 × 103 | 6.57 × 103 | 8.93 × 103 | 1.07 × 104 |
| Std | 6.25 × 102 | 3.79 × 102 | 5.47 × 102 | 7.11 × 102 | 5.84 × 102 | 4.49 × 102 | 3.61 × 102 | 7.50 × 102 | 2.87 × 102 | 5.36 × 102 | |
| C11 | Mean | 7.56 × 103 | 7.85 × 103 | 8.90 × 103 | 7.28 × 103 | 7.81 × 103 | 8.96 × 103 | 1.01 × 104 | 7.47 × 103 | 9.31 × 103 | 1.10 × 104 |
| Std | 7.10 × 102 | 4.20 × 102 | 5.68 × 102 | 6.88 × 102 | 6.68 × 102 | 2.55 × 102 | 3.79 × 102 | 7.89 × 102 | 4.51 × 102 | 4.69 × 102 | |
| C12 | Mean | 1.20 × 103 | 1.20 × 103 | 1.20 × 103 | 1.20 × 103 | 1.20 × 103 | 1.20 × 103 | 1.20 × 103 | 1.20 × 103 | 1.20 × 103 | 1.21 × 103 |
| Std | 5.52 × 10 | 5.78 × 10−1 | 5.35 × 10−1 | 5.62 × 10−1 | 5.98 × 10−1 | 5.89 × 10−1 | 6.48 × 10−1 | 6.75 × 10−1 | 5.80 × 10−1 | 9.19 × 10−1 | |
| C13 | Mean | 1.30 × 103 | 1.31 × 103 | 1.31 × 103 | 1.31 × 103 | 1.31 × 103 | 1.31 × 103 | 1.31 × 103 | 1.31 × 103 | 1.31 × 103 | 1.31 × 103 |
| Std | 8.34 × 10−1 | 9.07 × 10−1 | 8.99 × 10−1 | 8.64 × 10−1 | 4.09 × 10−1 | 3.93 × 10−1 | 8.37 × 10−1 | 9.22 × 10−1 | 7.67 × 10−1 | 4.48 × 10−1 | |
| C14 | Mean | 1.45 × 103 | 1.63 × 103 | 1.57 × 103 | 1.47 × 103 | 1.41 × 103 | 1.49 × 103 | 1.73 × 103 | 1.42 × 103 | 1.59 × 103 | 1.79 × 103 |
| Std | 1.44 × 10 | 4.41 × 10 | 4.36 × 10 | 2.20 × 10 | 5.87 × 10 | 1.99 × 10 | 2.46 × 10 | 9.00 | 3.95 × 10 | 3.58 × 10 | |
| C15 | Mean | 4.34 × 103 | 2.50 × 105 | 4.92 × 104 | 9.04 × 103 | 8.92 × 104 | 2.54 × 104 | 5.38 × 105 | 4.74 × 103 | 1.03 × 105 | 9.16 × 105 |
| Std | 2.25 × 103 | 1.31 × 105 | 3.55 × 104 | 8.15 × 103 | 3.54 × 10 | 1.62 × 104 | 1.55 × 105 | 2.24 × 103 | 1.35 × 105 | 4.74 × 10−10 | |
| C16 | Mean | 1.61 × 103 | 1.61 × 103 | 1.61 × 103 | 1.61 × 103 | 1.61 × 103 | 1.61 × 103 | 1.61 × 103 | 1.61 × 103 | 1.61 × 103 | 1.61 × 103 |
| Std | 3.71 × 10−1 | 3.70 × 10−1 | 3.21 × 10−1 | 4.71 × 10−1 | 4.08 × 10−1 | 1.95 × 10−1 | 2.08 × 10−1 | 4.66 × 10−1 | 2.37 × 10−1 | 1.88 × 10−1 | |
| C17 | Mean | 8.59 × 107 | 8.90 × 107 | 1.36 × 108 | 1.61 × 107 | 1.64 × 108 | 1.56 × 107 | 2.47 × 108 | 2.35 × 107 | 9.17 × 106 | 5.48 × 108 |
| Std | 7.10 × 106 | 6.17 × 107 | 8.13 × 107 | 1.40 × 107 | 5.24 × 106 | 5.76 × 106 | 6.66 × 107 | 2.13 × 107 | 1.30 × 107 | 2.33 × 108 | |
| C18 | Mean | 1.36 × 107 | 2.44 × 109 | 2.78 × 109 | 2.90 × 108 | 3.80 × 109 | 4.77 × 108 | 7.52 × 109 | 6.11 × 106 | 2.65 × 108 | 1.20 × 1010 |
| Std | 2.06 × 107 | 2.04 × 109 | 1.67 × 109 | 6.85 × 108 | 2.05 × 106 | 2.52 × 108 | 2.30 × 109 | 7.19 × 106 | 3.73 × 108 | 3.82 × 109 | |
| C19 | Mean | 2.01 × 103 | 2.24 × 103 | 2.27 × 103 | 2.30 × 103 | 2.30 × 103 | 2.25 × 103 | 2.49 × 103 | 2.32 × 103 | 2.10 × 103 | 2.80 × 103 |
| Std | 5.12 × 10 | 1.05 × 102 | 9.98 × 101 | 9.65 × 10 | 3.15 × 10 | 3.29 × 10 | 7.58 × 10 | 5.24 × 10 | 6.27 × 10 | 2.51 × 10 | |
| C20 | Mean | 3.67 × 104 | 1.86 × 105 | 2.45 × 105 | 9.06 × 104 | 4.34 × 105 | 5.90 × 104 | 3.43 × 106 | 4.97 × 105 | 2.75 × 104 | 1.07 × 108 |
| Std | 3.96 × 104 | 9.23 × 104 | 1.27 × 105 | 6.04 × 104 | 5.11 × 104 | 2.94 × 104 | 4.51 × 106 | 7.78 × 105 | 2.08 × 104 | 2.87 × 107 | |
| C21 | Mean | 1.12 × 106 | 3.36 × 107 | 5.47 × 107 | 9.65 × 106 | 5.65 × 107 | 5.18 × 106 | 1.07 × 108 | 1.25 × 107 | 5.17 × 105 | 2.80 × 108 |
| Std | 6.21 × 105 | 2.39 × 107 | 2.92 × 107 | 9.83 × 106 | 1.66 × 106 | 2.86 × 106 | 5.82 × 107 | 9.65 × 106 | 7.13 × 105 | 2.14 × 108 | |
| C22 | Mean | 2.85 × 103 | 4.93 × 103 | 4.69 × 103 | 3.28 × 103 | 6.49 × 103 | 3.37 × 103 | 3.08 × 104 | 3.32 × 103 | 3.08 × 103 | 1.68 × 105 |
| Std | 2.12 × 102 | 2.12 × 107 | 1.78 × 103 | 7.41 × 102 | 2.78 × 102 | 1.72 × 102 | 3.05 × 104 | 2.89 × 102 | 2.52 × 102 | 7.01 × 104 | |
| C23 | Mean | 2.50 × 103 | 2.50 × 103 | 2.50 × 103 | 2.50 × 103 | 2.50 × 103 | 2.72 × 103 | 2.50 × 103 | 2.72 × 103 | 2.84 × 103 | 2.50 × 103 |
| Std | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 3.17 × 10 | 0.00 | 4.01 × 10 | 9.01 × 10 | 0.00 | |
| C24 | Mean | 2.60 × 103 | 2.60 × 103 | 2.60 × 103 | 2.60 × 103 | 2.60 × 103 | 2.63 × 103 | 2.60 × 103 | 2.61 × 103 | 2.69 × 103 | 2.60 × 103 |
| Std | 0.00 | 8.87 × 10−2 | 0.00 | 1.46 × 10−7 | 2.34 × 10−5 | 1.87 × 10 | 0.00 | 5.81 | 1.34 × 10 | 0.00 | |
| C25 | Mean | 2.70 × 103 | 2.70 × 103 | 2.70 × 103 | 2.70 × 103 | 2.70 × 103 | 2.75 × 103 | 2.70 × 103 | 2.72 × 103 | 2.73 × 103 | 2.70 × 103 |
| Std | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 1.15 × 10 | 0.00 | 1.83 × 10 | 8.74 | 0.00 | |
| C26 | Mean | 2.77 × 103 | 2.77 × 103 | 2.77 × 103 | 2.77 × 103 | 2.78 × 103 | 2.70 × 103 | 2.79 × 103 | 2.74 × 103 | 2.73 × 103 | 2.79 × 103 |
| Std | 4.33 × 10 | 4.41 × 10 | 4.25 × 10 | 4.62 × 10 | 4.99 × 10 | 4.96 × 10−1 | 2.35 × 101 | 8.00 × 10 | 4.33 × 10 | 2.39 × 10 | |
| C27 | Mean | 2.90 × 103 | 4.05 × 103 | 2.90 × 103 | 2.90 × 103 | 2.90 × 103 | 3.91 × 103 | 2.90 × 103 | 3.99 × 10 | 3.86 × 103 | 2.90 × 103 |
| Std | 0.00 | 3.71 × 102 | 0.00 | 0.00 | 3.98 | 2.65 × 102 | 0.00 | 2.42 × 102 | 2.46 × 102 | 0.00 | |
| C28 | Mean | 3.00 × 103 | 5.34 × 103 | 3.00 × 103 | 3.00 × 103 | 3.00 × 103 | 5.95 × 103 | 3.00 × 103 | 5.40 × 103 | 5.36 × 103 | 3.00 × 103 |
| Std | 0.00 | 2.75 × 103 | 0.00 | 0.00 | 0.00 | 6.11 × 102 | 0.00 | 8.95 × 102 | 4.64 × 102 | 0.00 | |
| C29 | Mean | 3.10 × 103 | 4.32 × 108 | 3.10 × 103 | 7.17 × 106 | 1.46 × 104 | 4.43 × 107 | 3.10 × 103 | 1.79 × 107 | 6.87 × 107 | 3.10 × 103 |
| Std | 0.00 | 1.80 × 108 | 0.00 | 7.00 × 106 | 6.28 × 104 | 1.75 × 107 | 0.00 | 1.63 × 107 | 5.50 × 107 | 0.00 | |
| C30 | Mean | 3.20 × 103 | 4.16 × 106 | 3.20 × 103 | 3.29 × 105 | 1.66 × 105 | 6.97 × 105 | 3.20 × 103 | 4.02 × 105 | 4.17 × 105 | 3.20 × 103 |
| Std | 0.00 | 2.65 × 106 | 0.00 | 2.80 × 105 | 1.44 × 105 | 2.87 × 105 | 0.00 | 2.76 × 105 | 2.34 × 105 | 0.00 | |
| Function | HAGSA vs. | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| AOA | Gold-SA | ROA | AO | SCA | WOA | FPA | DE | GA | |
| C01 | 3.02 × 10−11 | 3.02 × 10−11 | 2.71 × 10−2 | 2.13 × 10−4 | 4.08 × 10−11 | 2.64 × 10−1 | 3.02 × 10−11 | 1.29 × 10−9 | 2.37 × 10−12 |
| C02 | 3.02 × 10−11 | 3.02 × 10−11 | 7.01 × 10−2 | 3.02 × 10−11 | 5.83 × 10−13 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 1.21 × 10−12 |
| C03 | 3.02 × 10−11 | 3.02 × 10−11 | 3.32 × 10−6 | 2.49 × 10−6 | 2.00 × 10−5 | 6.52 × 10−9 | 3.02 × 10−11 | 3.82 × 10−10 | 3.02 × 10−11 |
| C04 | 3.02 × 10−11 | 3.02 × 10−11 | 2.06 × 10−2 | 2.61 × 10−10 | 4.71 × 10−4 | 1.31 × 10−8 | 3.02 × 10−11 | 3.69 × 10−11 | 1.21 × 10−12 |
| C05 | 1.78 × 10−10 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 |
| C06 | 4.62 × 10−10 | 3.02 × 10−11 | 2.75 × 10−3 | 7.73 × 10−2 | 2.23 × 10−9 | 1.29 × 10−11 | 3.02 × 10−11 | 1.30 × 10−1 | 2.95 × 10−11 |
| C07 | 3.02 × 10−11 | 6.07 × 10−11 | 1.45 × 10−1 | 3.02 × 10−11 | 2.13 × 10−5 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.16 × 10−12 |
| C08 | 3.02 × 10−11 | 3.02 × 10−11 | 1.73 × 10−6 | 1.25 × 10−7 | 3.02 × 10−11 | 2.84 × 10−4 | 3.02 × 10−11 | 5.49 × 10−11 | 9.40 × 10−12 |
| C09 | 3.02 × 10−11 | 3.02 × 10−11 | 1.44 × 10−2 | 7.70 × 10−8 | 3.34 × 10−11 | 4.42 × 10−6 | 3.02 × 10−11 | 6.12 × 10−10 | 1.21 × 10−12 |
| C10 | 2.23 × 10−9 | 3.02 × 10−11 | 5.09 × 10−8 | 2.97 × 10−1 | 3.02 × 10−11 | 1.46 × 10−10 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 |
| C11 | 3.50 × 10−9 | 3.02 × 10−11 | 1.37 × 10−3 | 5.01 × 10−1 | 3.34 × 10−11 | 2.96 × 10−5 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 |
| C12 | 6.91 × 10−4 | 2.39 × 10−8 | 1.76 × 10−2 | 2.90 × 10−1 | 1.69 × 10−9 | 5.27 × 10−5 | 4.50 × 10−11 | 3.02 × 10−11 | 2.80 × 10−11 |
| C13 | 3.02 × 10−11 | 3.69 × 10−11 | 1.38 × 10−2 | 6.07 × 10−11 | 1.68 × 10−3 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 7.88 × 10−12 |
| C14 | 3.02 × 10−11 | 3.02 × 10−11 | 4.22 × 10−4 | 1.33 × 10−10 | 1.39 × 10−6 | 1.09 × 10−10 | 3.02 × 10−11 | 3.02 × 10−11 | 1.72 × 10−12 |
| C15 | 3.02 × 10−11 | 3.02 × 10−11 | 5.49 × 10−1 | 3.02 × 10−11 | 1.69 × 10−9 | 2.37 × 10−10 | 3.02 × 10−11 | 3.02 × 10−11 | 1.21 × 10−12 |
| C16 | 1.56 × 10−8 | 4.18 × 10−9 | 1.64 × 10−5 | 2.23 × 10−9 | 4.50 × 10−11 | 3.20 × 10−9 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 |
| C17 | 3.02 × 10−11 | 3.02 × 10−11 | 6.97 × 10−3 | 3.95 × 10−1 | 7.22 × 10−6 | 2.43 × 10−5 | 3.02 × 10−11 | 2.32 × 10−2 | 3.00 × 10−11 |
| C18 | 3.02 × 10−11 | 3.02 × 10−11 | 4.86 × 10−3 | 1.21 × 10−10 | 6.70 × 10−11 | 3.96 × 10−8 | 3.02 × 10−11 | 4.08 × 10−11 | 2.63 × 10−11 |
| C19 | 3.02 × 10−11 | 3.34 × 10−11 | 2.39 × 10−4 | 4.35 × 10−5 | 5.61 × 10−5 | 3.55 × 10−1 | 3.02 × 10−11 | 4.57 × 10−9 | 1.72 × 10−12 |
| C20 | 3.02 × 10−11 | 1.41 × 10−9 | 1.00 × 10−3 | 9.83 × 10−8 | 1.91 × 10−2 | 2.20 × 10−7 | 3.69 × 10−11 | 7.96 × 10−3 | 3.02 × 10−11 |
| C21 | 3.02 × 10−11 | 3.02 × 10−11 | 3.18 × 10−4 | 4.17 × 10−2 | 2.28 × 10−5 | 1.07 × 10−7 | 3.02 × 10−11 | 3.38 × 10−2 | 3.02 × 10−11 |
| C22 | 5.49 × 10−11 | 1.46 × 10−10 | 5.32 × 10−3 | 3.03 × 10−2 | 7.70 × 10−8 | 1.64 × 10−5 | 3.02 × 10−11 | 4.06 × 10−2 | 3.02 × 10−11 |
| C23 | 1.21 × 10−12 | NaN | NaN | NaN | 1.21 × 10−12 | 1.21 × 10−12 | NaN | 1.21 × 10−12 | NaN |
| C24 | 1.21 × 10−12 | NaN | 1.61 × 10−1 | 6.62 × 10−4 | 1.21 × 10−12 | 1.21 × 10−12 | NaN | 1.21 × 10−12 | NaN |
| C25 | 1.21 × 10−12 | NaN | NaN | NaN | 1.21 × 10−12 | 1.93 × 10−9 | NaN | 1.21 × 10−12 | NaN |
| C26 | 8.11 × 10−8 | 3.55 × 10−1 | 2.86 × 10−4 | 4.56 × 10−2 | 3.98 × 10−6 | 9.59 × 10−9 | 8.00 × 10−1 | 7.40 × 10−3 | 1.89E-02 |
| C27 | 1.21 × 10−12 | NaN | NaN | 4.19 × 10−2 | 1.21 × 10−12 | 1.21 × 10−12 | NaN | 1.21 × 10−12 | NaN |
| C28 | 1.21 × 10−12 | NaN | NaN | NaN | 1.21 × 10−12 | 1.21 × 10−12 | NaN | 1.21 × 10−12 | NaN |
| C29 | 1.21 × 10−12 | NaN | 6.61 × 10−5 | 1.61 × 10−1 | 1.21 × 10−12 | 1.21 × 10−12 | NaN | 1.21 × 10−12 | NaN |
| C30 | 1.21 × 10−12 | NaN | 6.25 × 10−10 | 1.31 × 10−7 | 1.21 × 10−12 | 1.21 × 10−12 | NaN | 1.21 × 10−12 | NaN |
| Function | HAGSA | AOA | Gold-SA | ROA | AO | SCA | WOA | FPA | DE | GA |
|---|---|---|---|---|---|---|---|---|---|---|
| C01 | 0.5375 | 0.1722 | 0.1260 | 0.3587 | 0.3303 | 0.1756 | 0.1482 | 0.2102 | 0.2743 | 0.1516 |
| C02 | 0.5998 | 0.1487 | 0.0918 | 0.2918 | 0.2854 | 0.1491 | 0.1332 | 0.1697 | 0.2010 | 0.1048 |
| C03 | 0.5519 | 0.1659 | 0.1094 | 0.2395 | 0.2817 | 0.1588 | 0.1391 | 0.1558 | 0.2050 | 0.1043 |
| C04 | 0.5085 | 0.1585 | 0.0929 | 0.2545 | 0.2499 | 0.1490 | 0.1803 | 0.1472 | 0.1971 | 0.1027 |
| C05 | 0.5959 | 0.1564 | 0.1334 | 0.3615 | 0.3404 | 0.1521 | 0.1794 | 0.1705 | 0.2365 | 0.1136 |
| C06 | 6.7234 | 1.1244 | 1.4928 | 5.5571 | 2.3889 | 1.5203 | 1.5837 | 1.5670 | 3.1240 | 1.3135 |
| C07 | 0.6473 | 0.1605 | 0.1203 | 0.2872 | 0.3283 | 0.1850 | 0.1192 | 0.1661 | 0.2290 | 0.1047 |
| C08 | 0.4786 | 0.1447 | 0.1027 | 0.2972 | 0.2493 | 0.1391 | 0.1212 | 0.1707 | 0.1799 | 0.1051 |
| C09 | 0.6048 | 0.1847 | 0.1061 | 0.3045 | 0.2735 | 0.1681 | 0.1289 | 0.1791 | 0.2101 | 0.1046 |
| C10 | 0.8256 | 0.1980 | 0.1440 | 0.4217 | 0.4360 | 0.2012 | 0.1474 | 0.2088 | 0.3306 | 0.1520 |
| C11 | 0.8986 | 0.2100 | 0.1596 | 0.7439 | 0.4011 | 0.2126 | 0.1802 | 0.2147 | 0.3569 | 0.2055 |
| C12 | 1.2724 | 0.3245 | 0.2602 | 1.1208 | 0.6199 | 0.3206 | 0.2946 | 0.3260 | 0.7370 | 0.3250 |
| C13 | 0.5331 | 0.1451 | 0.0933 | 0.2555 | 0.2930 | 0.1541 | 0.1137 | 0.1541 | 0.2013 | 0.0944 |
| C14 | 0.5130 | 0.1508 | 0.1108 | 0.3054 | 0.2816 | 0.1956 | 0.1180 | 0.1509 | 0.1855 | 0.1184 |
| C15 | 0.4946 | 0.1610 | 0.1320 | 0.3372 | 0.3080 | 0.1914 | 0.1421 | 0.1771 | 0.2245 | 0.1277 |
| C16 | 0.5078 | 0.1538 | 0.0978 | 0.3274 | 0.3163 | 0.1599 | 0.1164 | 0.1952 | 0.2397 | 0.1200 |
| C17 | 0.6081 | 0.1684 | 0.1537 | 0.4210 | 0.3202 | 0.1730 | 0.1852 | 0.1790 | 0.2857 | 0.1479 |
| C18 | 0.4803 | 0.1439 | 0.1028 | 0.3162 | 0.3332 | 0.2505 | 0.1138 | 0.2067 | 0.2115 | 0.1057 |
| C19 | 1.6777 | 0.3450 | 0.3121 | 1.2646 | 0.7030 | 0.5136 | 0.3195 | 0.5490 | 0.8568 | 0.2681 |
| C20 | 0.4975 | 0.1584 | 0.0987 | 0.3122 | 0.3295 | 0.1577 | 0.1371 | 0.1958 | 0.2195 | 0.1226 |
| C21 | 0.5846 | 0.2016 | 0.1269 | 0.4338 | 0.3211 | 0.1794 | 0.1587 | 0.1744 | 0.2701 | 0.1310 |
| C22 | 0.6756 | 0.1951 | 0.1308 | 0.5880 | 0.3688 | 0.1932 | 0.1534 | 0.2029 | 0.3152 | 0.1749 |
| C23 | 1.8811 | 0.3695 | 0.3146 | 1.3598 | 0.7576 | 0.3692 | 0.4163 | 0.3930 | 0.9236 | 0.3200 |
| C24 | 1.4512 | 0.2916 | 0.2459 | 1.1242 | 0.5935 | 0.4264 | 0.2725 | 0.4199 | 0.9495 | 0.2777 |
| C25 | 1.6396 | 0.3334 | 0.2878 | 1.3109 | 0.7071 | 0.3465 | 0.3106 | 0.4518 | 1.0307 | 0.3435 |
| C26 | 6.4800 | 1.5258 | 2.0984 | 5.0402 | 3.0212 | 2.0210 | 1.7759 | 1.7384 | 4.3710 | 1.6796 |
| C27 | 6.3308 | 1.5334 | 1.2872 | 4.7350 | 2.8645 | 1.8617 | 1.8453 | 1.7505 | 4.3188 | 1.5384 |
| C28 | 1.7570 | 0.4684 | 0.3955 | 1.1151 | 0.8401 | 0.4585 | 0.5362 | 0.6638 | 1.1272 | 0.3811 |
| C29 | 2.0752 | 0.4942 | 0.6205 | 1.5271 | 0.9543 | 0.7252 | 0.6315 | 0.6343 | 1.4255 | 0.6466 |
| C30 | 1.2367 | 0.3321 | 0.2759 | 0.8986 | 0.6684 | 0.3431 | 0.3148 | 0.3581 | 0.7941 | 0.4417 |
| Algorithm | Optimum Variables | Optimum Cost | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| x1 | x2 | x3 | x4 | x5 | x6 | x7 | x8 | x9 | x10 | x11 | ||
| HAGSA | 0.5 | 1.253 | 0.5 | 1.109 | 0.5 | 0.5 | 0.501 | 0.344 | 0.192 | 3.904 | 6.381 | 22.9765 |
| AOA | 0.5 | 1.262 | 0.5 | 1.156 | 0.5 | 0.772 | 0.5 | 0.310 | 0.192 | 0.365 | 1.162 | 23.2139 |
| Gold-SA | 0.5 | 1.278 | 0.612 | 1.102 | 0.544 | 1.323 | 0.5 | 0.345 | 0.345 | 0.170 | 0.294 | 23.9711 |
| ROA | 0.5 | 1.235 | 0.5 | 1.166 | 0.5 | 1.110 | 0.5 | 0.341 | 0.192 | 0.275 | 2.926 | 23.0801 |
| AO | 0.724 | 1.175 | 0.502 | 1.200 | 0.5 | 0.792 | 0.5 | 0.308 | 0.192 | 0.739 | 2.837 | 23.1694 |
| SCA | 0.567 | 1.334 | 0.540 | 1.167 | 0.5 | 1.109 | 0.5 | 0.233 | 0.263 | 0.301 | 2.393 | 24.3513 |
| WOA | 0.953 | 1.106 | 0.5 | 1.206 | 0.524 | 0.559 | 0.501 | 0.282 | 0.298 | 0.246 | 7.326 | 24.6495 |
| FPA | 0.532 | 1.322 | 0.515 | 1.143 | 0.616 | 0.516 | 0.534 | 0.197 | 0.197 | 0.710 | 1.892 | 24.1309 |
| DE | 0.505 | 1.446 | 0.521 | 1.182 | 0.5 | 1.466 | 0.5 | 0.312 | 0.192 | 1.008 | 13.266 | 24.7181 |
| GA | 1.073 | 1.0465 | 0.595 | 1.096 | 0.714 | 0.502 | 0.521 | 0.322 | 0.264 | 5.549 | 8.215 | 25.4504 |
| Algorithm | Optimum Variables | Optimum Cost | |||
|---|---|---|---|---|---|
| Ts | Th | R | L | ||
| HAGSA | 0.8304795 | 0.3770664 | 44.00935 | 154.9557 | 5982.8355 |
| AOA | 0.8395475 | 0.4113845 | 44.27936 | 156.8883 | 6068.3284 |
| Gold-SA | 0.7140179 | 0.4619435 | 40.49522 | 197.7362 | 6090.4062 |
| ROA | 0.8610026 | 0.3934984 | 44.96907 | 144.2921 | 6023.0145 |
| AO | 0.8030047 | 0.4524486 | 43.65139 | 158.3146 | 6024.2153 |
| SCA | 0.963087 | 0.476939 | 51.4412 | 87.3095 | 6246.7789 |
| WOA | 0.937726 | 0.473373 | 49.9436 | 98.8134 | 6195.7655 |
| FPA | 0.971843 | 0.478402 | 52.5479 | 81.3225 | 6393.2109 |
| DE | 1.009677 | 0.498834 | 54.0470 | 69.2270 | 6398.6641 |
| GA | 1.025422 | 0.484037 | 54.7458 | 64.6720 | 6439.9228 |
| Algorithm | Optimum Variables | Optimum Cost | ||
|---|---|---|---|---|
| d | D | N | ||
| HAGSA | 0.050411 | 0.37384 | 9.7854 | 0.011196 |
| AOA | 0.051791 | 0.388 | 9.5556 | 0.012026 |
| Gold-SA | 0.060683 | 0.67982 | 3.1063 | 0.012783 |
| ROA | 0.059221 | 0.6308 | 3.5188 | 0.012209 |
| AO | 0.05 | 0.337193 | 13.0905 | 0.012721 |
| SCA | 0.061365 | 0.70355 | 2.9232 | 0.013043 |
| WOA | 0.0502069 | 0.351224 | 12.336 | 0.012692 |
| FPA | 0.10187 | 1.093 | 9.5387 | 0.130890 |
| DE | 0.06766 | 0.907935 | 2.0871 | 0.016985 |
| GA | 0.05401 | 0.465113 | 9.6797 | 0.015848 |
| Algorithm | Optimum Variables | Optimum Cost | ||||||
|---|---|---|---|---|---|---|---|---|
| x1 | x2 | x3 | x4 | x5 | x6 | x7 | ||
| HAGSA | 3.49767 | 0.7 | 17 | 7.3 | 7.8001 | 3.34982 | 5.28559 | 2995.4897 |
| AOA | 3.50776 | 0.7 | 17 | 7.77685 | 7.96133 | 3.35075 | 5.28557 | 3007.0806 |
| Gold-SA | 3.49441 | 0.7 | 17 | 7.3 | 7.8 | 3.42383 | 5.2872 | 3016.2163 |
| ROA | 3.50776 | 0.7 | 17 | 7.77685 | 7.96133 | 3.35075 | 5.28557 | 3007.0806 |
| AO | 3.49748 | 0.7 | 17 | 8.07645 | 7.8 | 3.35162 | 5.28573 | 3002.8462 |
| SCA | 3.6 | 0.7 | 17 | 8.3 | 8.3 | 3.43032 | 5.30013 | 3085.2732 |
| WOA | 3.5247 | 0.7 | 17 | 8.14441 | 8.05897 | 3.35091 | 5.28568 | 3019.883 |
| FPA | 3.6 | 0.7 | 17 | 7.3 | 7.8 | 3.41261 | 5.28143 | 3056.8032 |
| DE | 3.5119 | 0.7 | 17 | 8.3 | 8.3 | 3.37356 | 5.38151 | 3088.6759 |
| GA | 3.4896 | 0.7 | 17 | 7.71388 | 7.8 | 3.65614 | 5.29218 | 3094.3185 |
| Algorithm | Optimum Variables | Optimum Cost | ||||
|---|---|---|---|---|---|---|
| x1 | x2 | x3 | x4 | x5 | ||
| HAGSA | 5.9271 | 5.3962 | 4.5081 | 3.476 | 2.1726 | 1.3404 |
| AOA | 6.4746 | 5.515 | 4.1138 | 3.7827 | 1.8724 | 1.3577 |
| Gold-SA | 5.7908 | 5.0142 | 4.9397 | 3.4175 | 2.5713 | 1.3562 |
| ROA | 5.8567 | 5.4316 | 4.4342 | 3.6542 | 2.1263 | 1.3418 |
| AO | 5.8219 | 5.4572 | 4.4551 | 3.5517 | 2.2198 | 1.342 |
| SCA | 5.781 | 5.5669 | 4.9992 | 3.5049 | 2.5094 | 1.3954 |
| WOA | 6.6424 | 5.0184 | 4.8451 | 3.0428 | 2.287 | 1.3626 |
| FPA | 5.7763 | 6.4239 | 4.6938 | 3.6501 | 1.6685 | 1.3861 |
| DE | 7.1323 | 4.9612 | 4.2559 | 3.3748 | 2.5797 | 1.3918 |
| GA | 6.5195 | 4.1943 | 5.7643 | 4.1847 | 2.2862 | 1.4320 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Li, N.; Jia, H.; Qi, Q.; Abualigah, L.; Liu, Y. A Hybrid Arithmetic Optimization and Golden Sine Algorithm for Solving Industrial Engineering Design Problems. Mathematics 2022, 10, 1567. https://doi.org/10.3390/math10091567
Liu Q, Li N, Jia H, Qi Q, Abualigah L, Liu Y. A Hybrid Arithmetic Optimization and Golden Sine Algorithm for Solving Industrial Engineering Design Problems. Mathematics. 2022; 10(9):1567. https://doi.org/10.3390/math10091567
Chicago/Turabian StyleLiu, Qingxin, Ni Li, Heming Jia, Qi Qi, Laith Abualigah, and Yuxiang Liu. 2022. "A Hybrid Arithmetic Optimization and Golden Sine Algorithm for Solving Industrial Engineering Design Problems" Mathematics 10, no. 9: 1567. https://doi.org/10.3390/math10091567