
A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems




Abstract
:1. Introduction
- 1-
- Using the combination of a type-3 fuzzy neural network and a backstepping control method for the first time.
- 2-
- Applying actuator failure to stochastic nonlinear system in a new way.
- 3-
- Ensuring the stability of the control system analytically.
2. Statement of the Problem
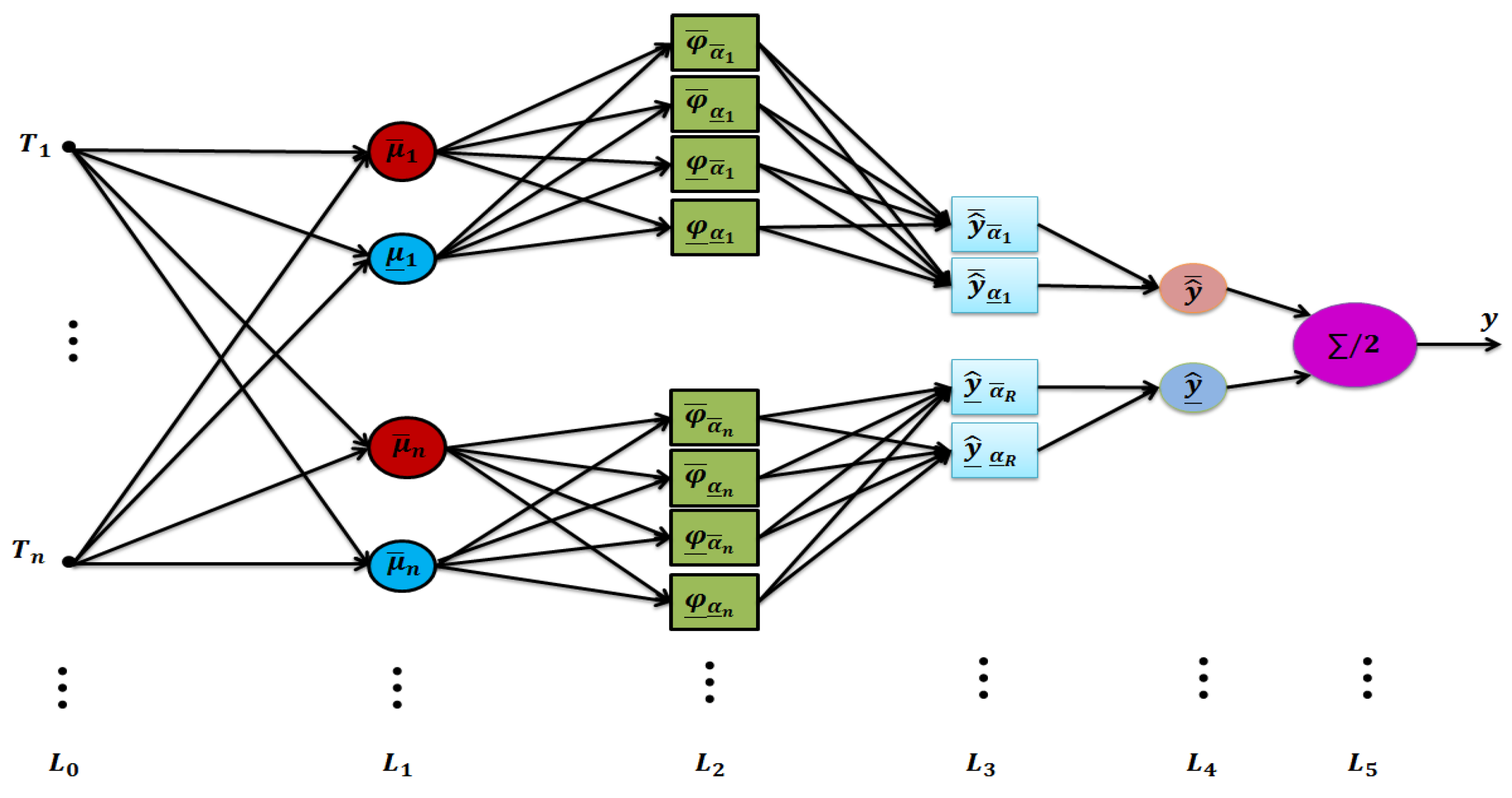
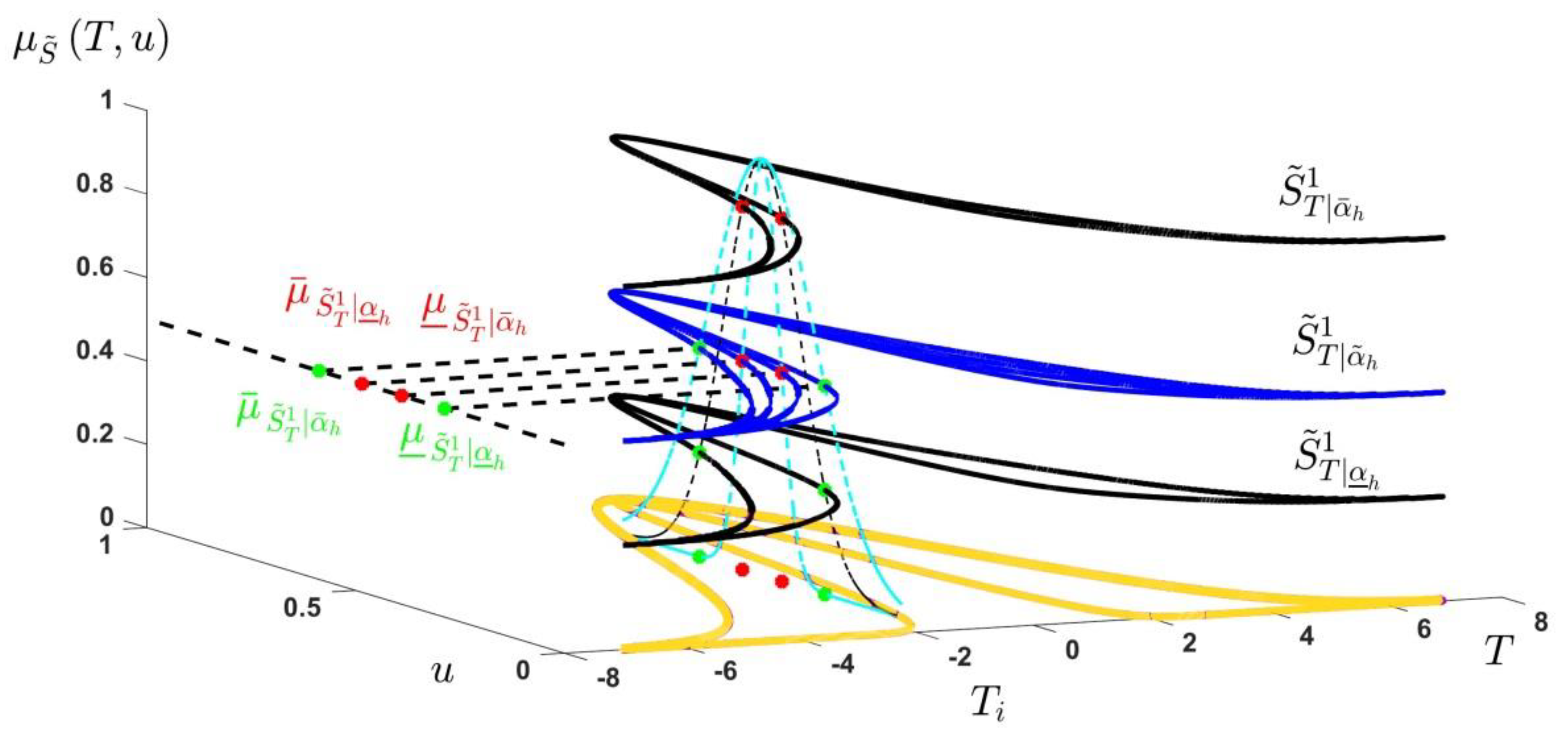
3. Type-3 Fuzzy Neural Network
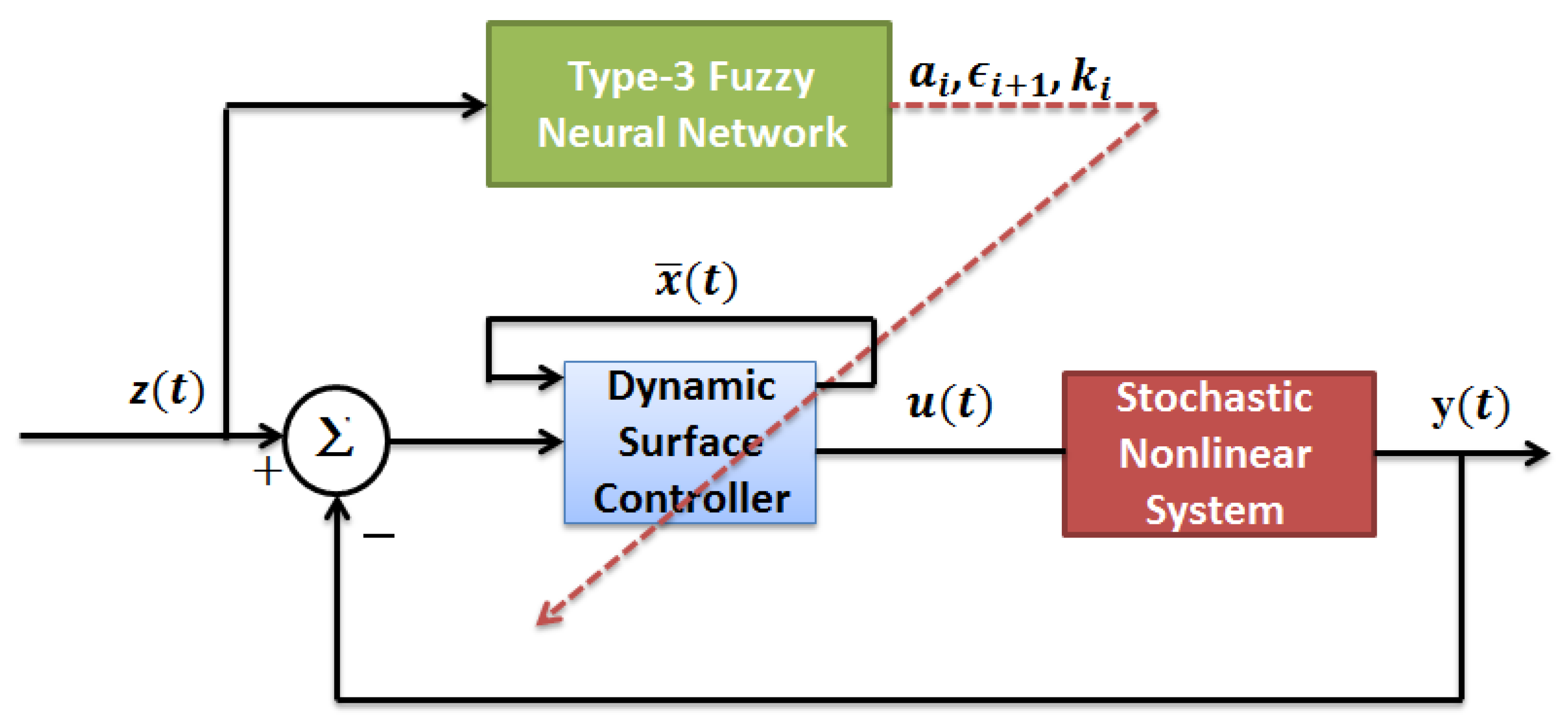
4. Controller Design
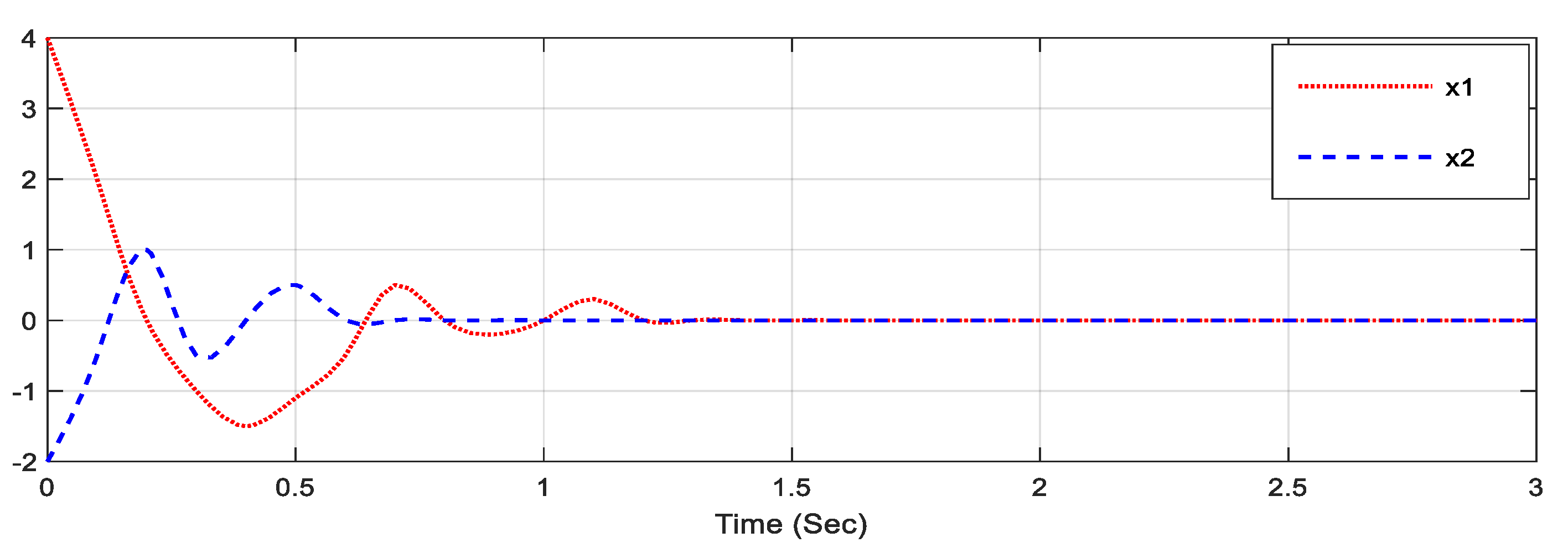
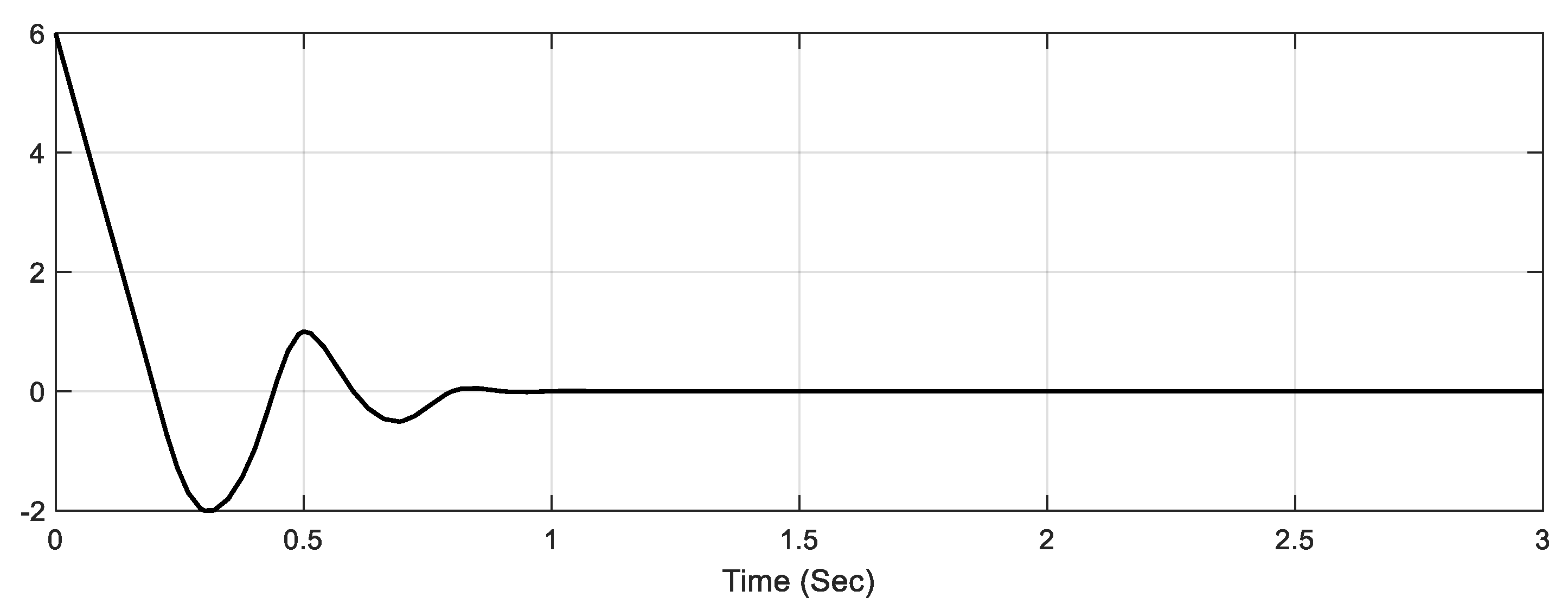
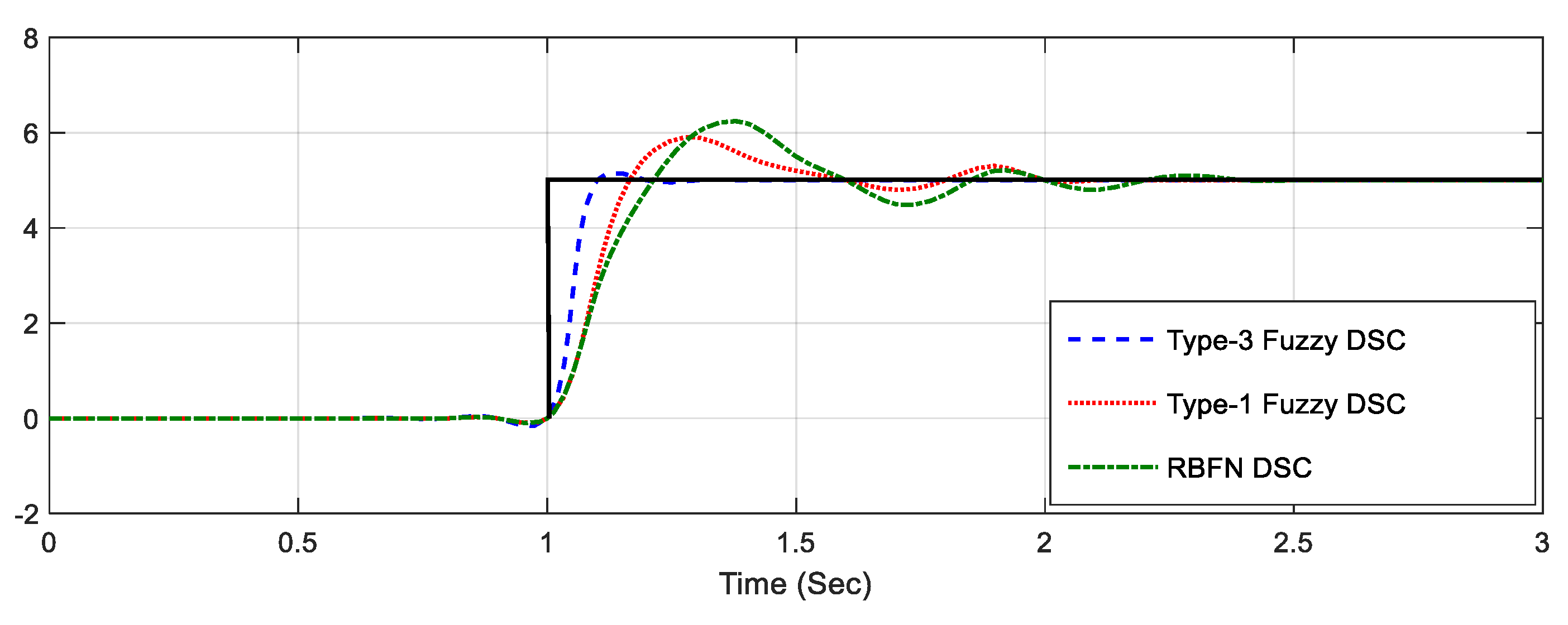
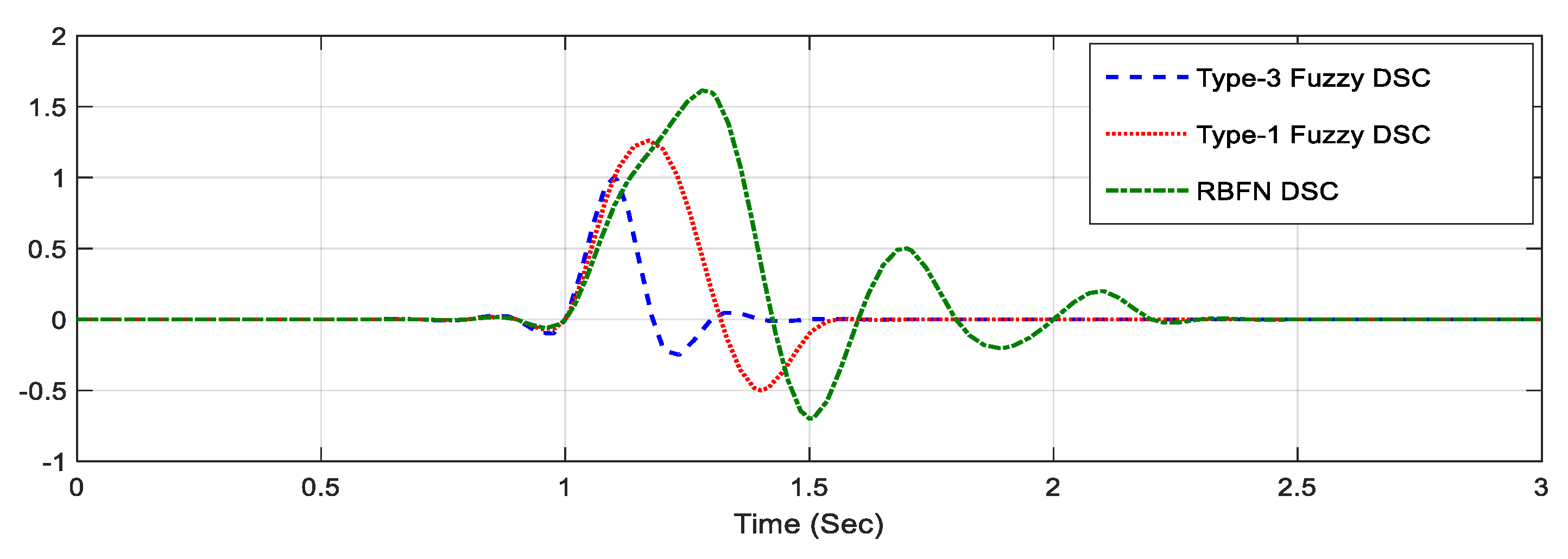
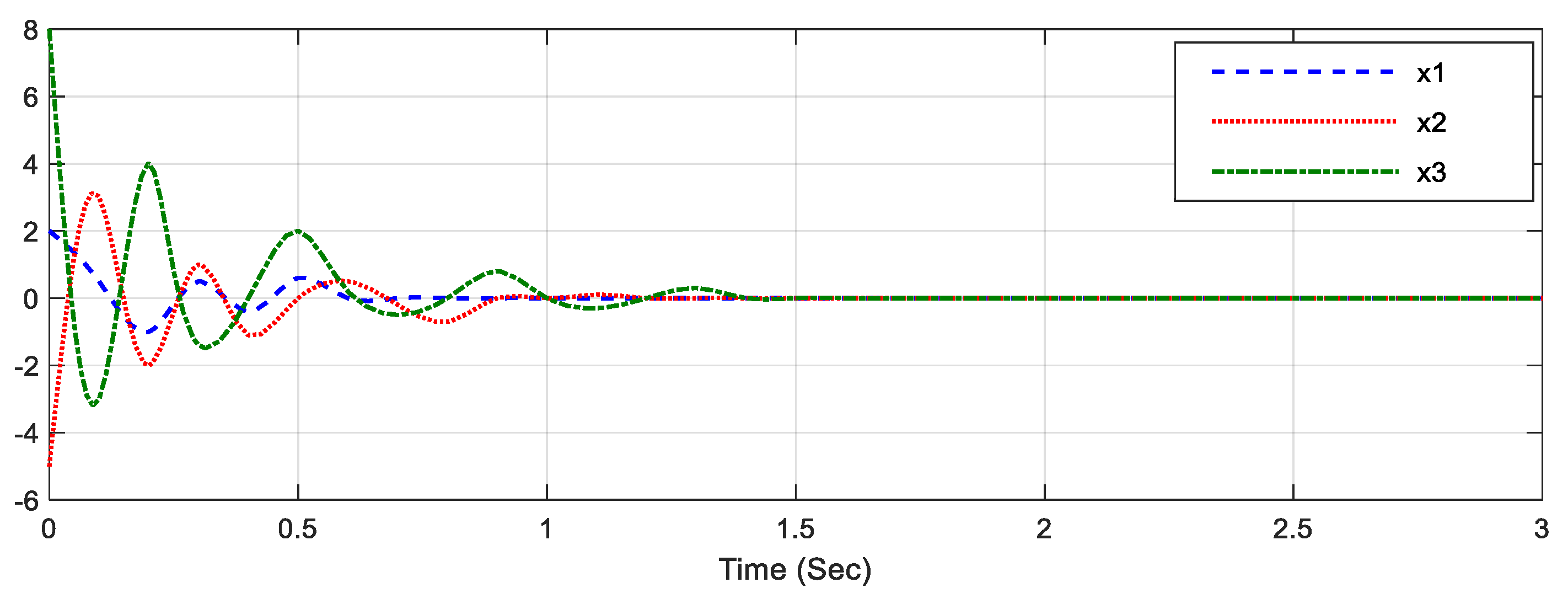
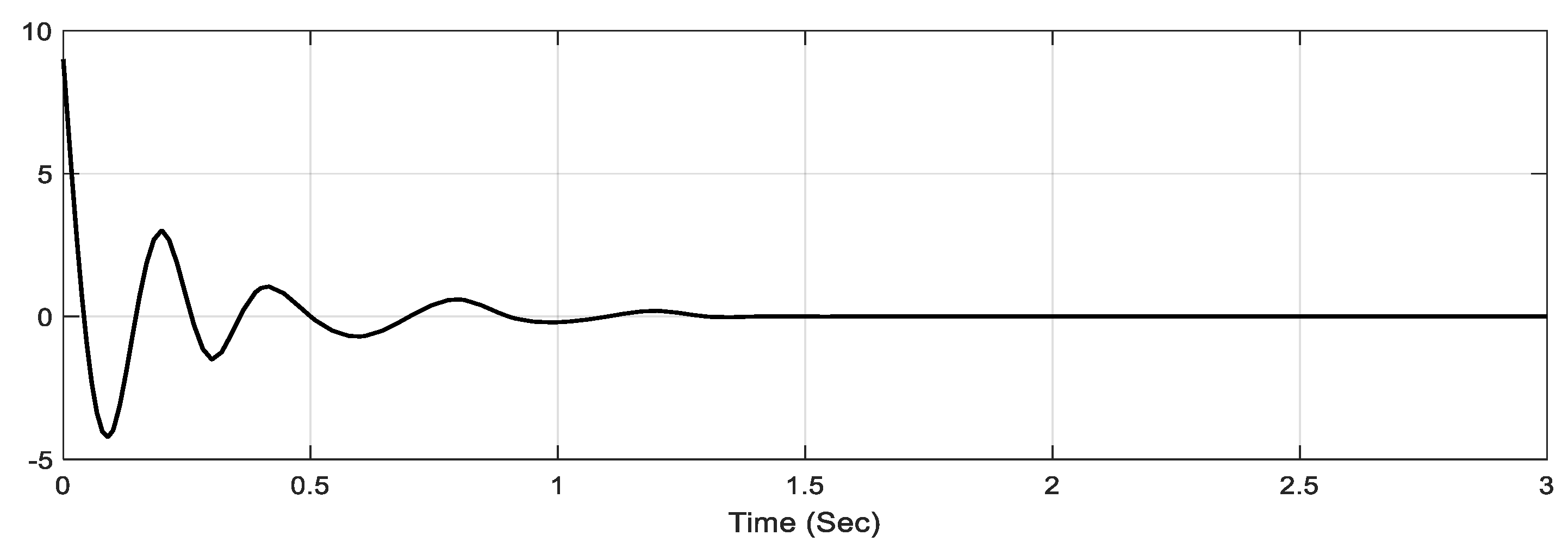
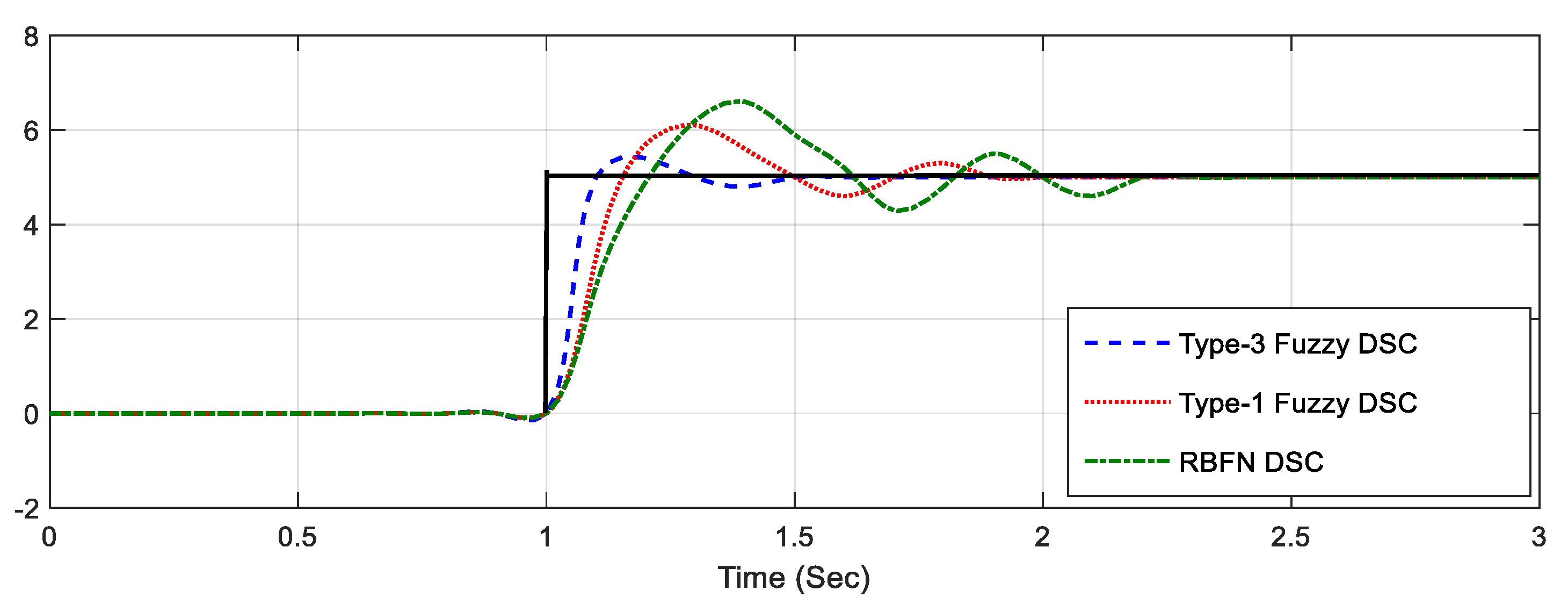
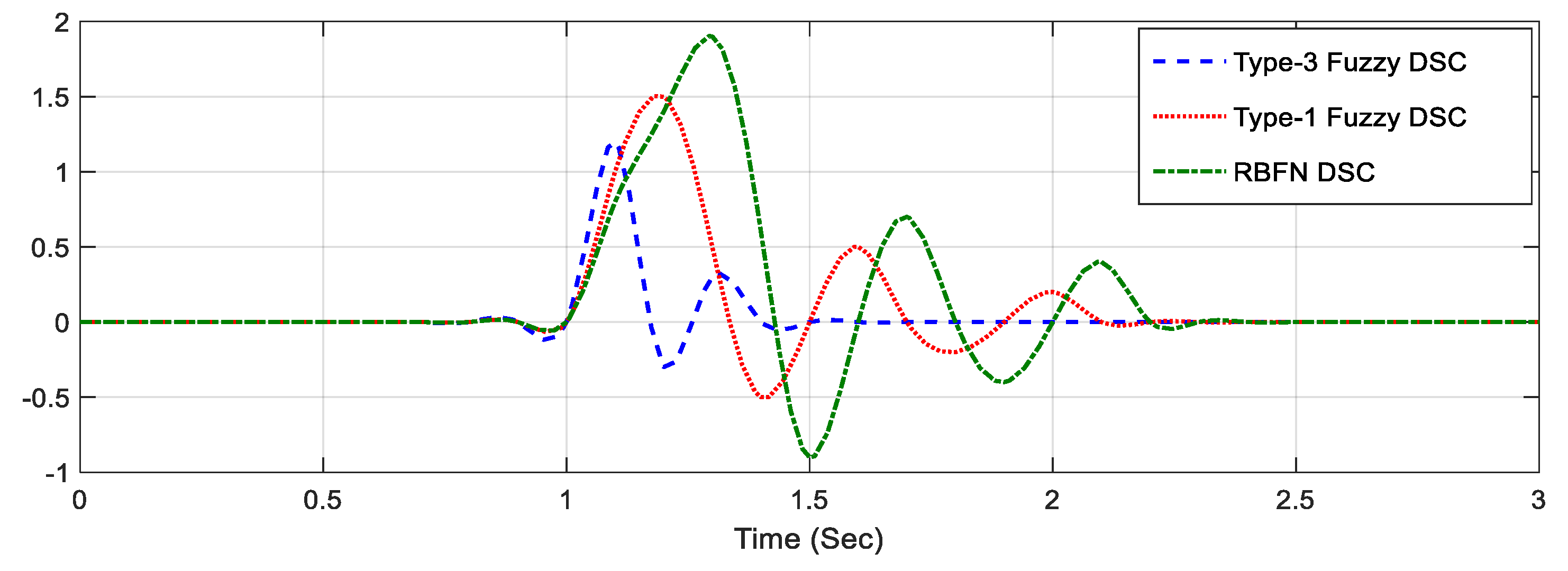
5. Simulations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Learning Algorithm
Appendix A.1. Tuning of Rule Parameters
Appendix A.2. Tuning of MF Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Symbol | Description |
|---|---|---|---|
| standard 2-dimensional external motions | F | filtration | |
| P | criterion Probability | X | vector of system state |
| space of uniform continuous fragment functions | output of the actuator | ||
| input signal to the actuator | density function | ||
| parameters of lower of l-th rule | parameters of upper of l-th rule | ||
| i-th error surface | i-th state | ||
| i-th desired state for the system | design parameters | ||
| design parameters | type-3 fuzzy membership functions in the first layer of the type-3 fuzzy neural network | ||
| design parameter | smooth functions | ||
| continue functions | smooth functions maximum | ||
| continue functions maximum | input of the system (control signal) | ||
| system’s output | corresponding covariance matrices for |
References
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. A class of uniaxial phenomenological models for simulating hysteretic phenomena in rate-independent mechanical systems and materials. Nonlinear Dyn. 2018, 93, 1647–1669. [Google Scholar] [CrossRef]
- Vaiana, N.; Sessa, S.; Rosati, L. A generalized class of uniaxial rate-independent models for simulating asymmetric mechanical hysteresis phenomena. Mech. Syst. Signal Process. 2021, 146, 106984. [Google Scholar] [CrossRef]
- Aguirre, G.; Janssens, T.; Brussel, H.V.; Al-Bender, F. Asymmetric-hysteresis compensation in piezoelectric actuators. Mech. Syst. Signal Process. 2012, 30, 218–231. [Google Scholar] [CrossRef]
- Borisov, A.; Bosov, A.; Miller, A. Optimal Stabilization of Linear Stochastic System with Statistically Uncertain Piecewise Constant Drift. Mathematics 2022, 10, 184. [Google Scholar] [CrossRef]
- Bashkirtseva, I. Controlling Stochastic Sensitivity by Feedback Regulators in Nonlinear Dynamical Systems with Incomplete Information. Mathematics 2021, 9, 3229. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Abdali, A.; Mohammadzadeh, A.; Nazari, M.; Mobayen, S.; Asad, J.H.; Bartoszewicz, A. A New General Type-2 Fuzzy Predictive Scheme for PID Tuning. Appl. Sci. 2021, 11, 10392. [Google Scholar] [CrossRef]
- Wang, J.; Xu, C.; Tavoosi, J. A Novel Nonlinear Control for Uncertain Polynomial Type-2 Fuzzy Systems (Case Study: Cart-Pole System). Int. J. Uncertain. Fuzziness Knowl.-Based Syst. 2021, 29, 753–770. [Google Scholar] [CrossRef]
- Mohammadi, F.; Mohammadi-ivatloo, B.; Gharehpetian, G.B.; Ali, M.H.; Wei, W.; Erdinç, O.; Shirkhani, M. Robust Control Strategies for Microgrids: A Review. IEEE Syst. J. 2021, 1–12. [Google Scholar] [CrossRef]
- Wang, M.; Wang, Z.; Dong, H.; Han, Q.L. A Novel Framework for Backstepping-Based Control of Discrete-Time Strict-Feedback Nonlinear Systems with Multiplicative Noises. IEEE Trans. Autom. Control 2021, 66, 1484–1496. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Bu, R. Radial Basis Function Neural Network Sliding Mode Control for Ship Path Following Based on Position Prediction. J. Mar. Sci. Eng. 2021, 9, 1055. [Google Scholar] [CrossRef]
- Niu, B.; Li, H.; Zhang, Z.; Li, J.; Hayat, T.; Alsaadi, F.E. Adaptive Neural-Network-Based Dynamic Surface Control for Stochastic Interconnected Nonlinear Nonstrict-Feedback Systems with Dead Zone. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1386–1398. [Google Scholar] [CrossRef]
- O’Hara, J.M.; Jolly, J.C.K.; Reynold, C.E.; Mantis, N.J. Localization of non-linear neutralizing B cell epitopes on ricin toxin’s enzymatic subunit (RTA). Immunol. Lett. 2014, 158, 7–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Labiod, S.; Guerra, T.M. Adaptive Fuzzy Control for Multivariable Nonlinear Systems with Indefinite Control Gain Matrix and Unknown Control Direction. IFAC-PapersOnLine 2020, 53, 8019–8024. [Google Scholar] [CrossRef]
- Fei, J.; Fang, Y.; Yuan, Z. Adaptive Fuzzy Sliding Mode Control for a Micro Gyroscope with Backstepping Controller. Micromachines 2020, 11, 968. [Google Scholar] [CrossRef]
- Wu, G.Q.; Song, S.M.; Sun, J.N. Finite-Time Dynamic Surface Antisaturation Control for Spacecraft Terminal Approach Considering Safety. J. Spacecr. Rocket. 2018, 55, 1430–1443. [Google Scholar] [CrossRef]
- Ma, Z.; Ma, H. Adaptive Fuzzy Backstepping Dynamic Surface Control of Strict-Feedback Fractional-Order Uncertain Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2020, 28, 122–133. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, P.; Kao, Y.; Liu, H.; Chen, D. Sliding mode control for Markovian jump repeated scalar nonlinear systems with packet dropouts: The uncertain occurrence probabilities case. Appl. Math. Comput. 2019, 362, 124574. [Google Scholar] [CrossRef]
- Sui, S.; Chen, C.L.P.; Tong, S. Neural-Network-Based Adaptive DSC Design for Switched Fractional-Order Nonlinear Systems. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4703–4712. [Google Scholar] [CrossRef]
- Sheng, Z.; Lin, C.; Chen, B.; Wang, Q.G. An asymmetric Lyapunov-Krasovskii functional method on stability and stabilization for T-S fuzzy systems with time delay. IEEE Trans. Fuzzy Syst. 2021, 1. [Google Scholar] [CrossRef]
- Min, H.; Xu, S.; Zhang, Z. Adaptive Finite-Time Stabilization of Stochastic Nonlinear Systems Subject to Full-State Constraints and Input Saturation. IEEE Trans. Autom. Control 2021, 66, 1306–1313. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Z.; Zhang, Y.; Chen, C.L.P.; Lai, G. Adaptive Neural Control of a Class of Stochastic Nonlinear Uncertain Systems With Guaranteed Transient Performance. IEEE Trans. Cybern. 2020, 50, 2971–2981. [Google Scholar] [CrossRef] [PubMed]
- Homayoun, B.; Arefi, M.M.; Vafamand, N. Robust adaptive backstepping tracking control of stochastic nonlinear systems with unknown input saturation: A command filter approach. Int. J. Robust Nonlinear Control 2020, 30, 3296–3313. [Google Scholar] [CrossRef]
- Liu, H.; Li, X.; Liu, X.; Wang, H. Backstepping-based decentralized bounded-H∞ adaptive neural control for a class of large-scale stochastic nonlinear systems. J. Frankl. Inst. 2019, 356, 8049–8079. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Castillo, O.; Band, S.S.; Mosavi, A. A Novel Fractional-Order Multiple-Model Type-3 Fuzzy Control for Nonlinear Systems with Unmodeled Dynamics. Int. J. Fuzzy Syst. 2021, 23, 1633–1651. [Google Scholar] [CrossRef]
- Al-Bender, F.; Symens, W.; Swevers, J.; Brussel, H.V. Theoretical analysis of the dynamic behavior of hysteresis elements in mechanical systems. Int. J. Non-Linear Mech. 2004, 39, 1721–1735. [Google Scholar] [CrossRef]
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. Nonlinear dynamic analysis of hysteretic mechanical systems by combining a novel rate-independent model and an explicit time integration method. Nonlinear Dyn. 2019, 98, 2879–2901. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Shirkhani, M.; Tavoosi, J.; Mahmoud, O. A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems. Mathematics 2022, 10, 1406. https://doi.org/10.3390/math10091406
Huang H, Shirkhani M, Tavoosi J, Mahmoud O. A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems. Mathematics. 2022; 10(9):1406. https://doi.org/10.3390/math10091406
Chicago/Turabian StyleHuang, Haifeng, Mohammadamin Shirkhani, Jafar Tavoosi, and Omar Mahmoud. 2022. "A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems" Mathematics 10, no. 9: 1406. https://doi.org/10.3390/math10091406