
Artificial Neural Based Speed and Flux Estimators for Induction Machine Drives with Matlab/Simulink

 , , and
, , and 
Abstract
:1. Introduction
2. Mathematical Model of Induction Motor
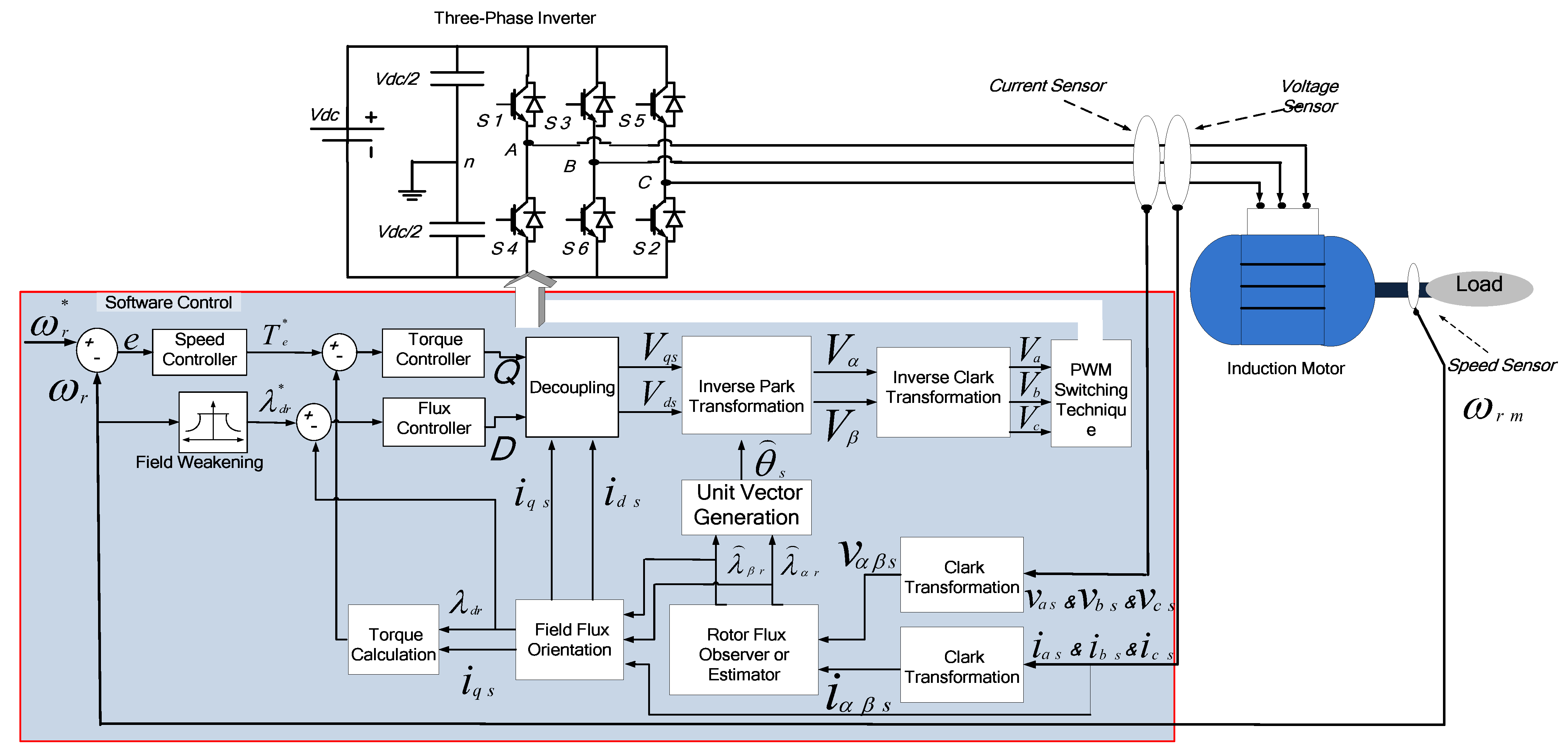
3. Field-Orientation Control Scheme of IM
4. Methodology of ANN Application for Speed and Flux Estimation
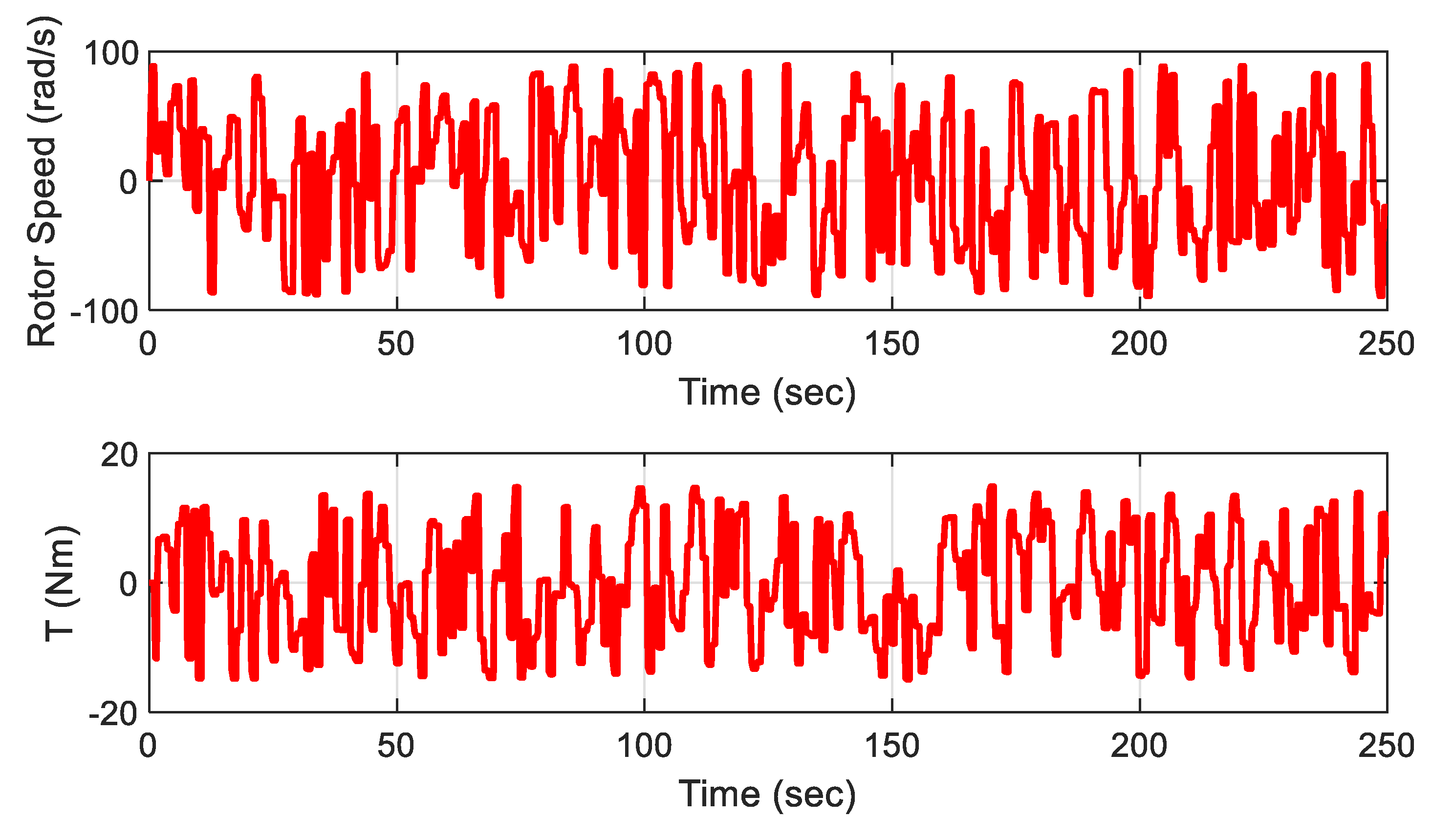
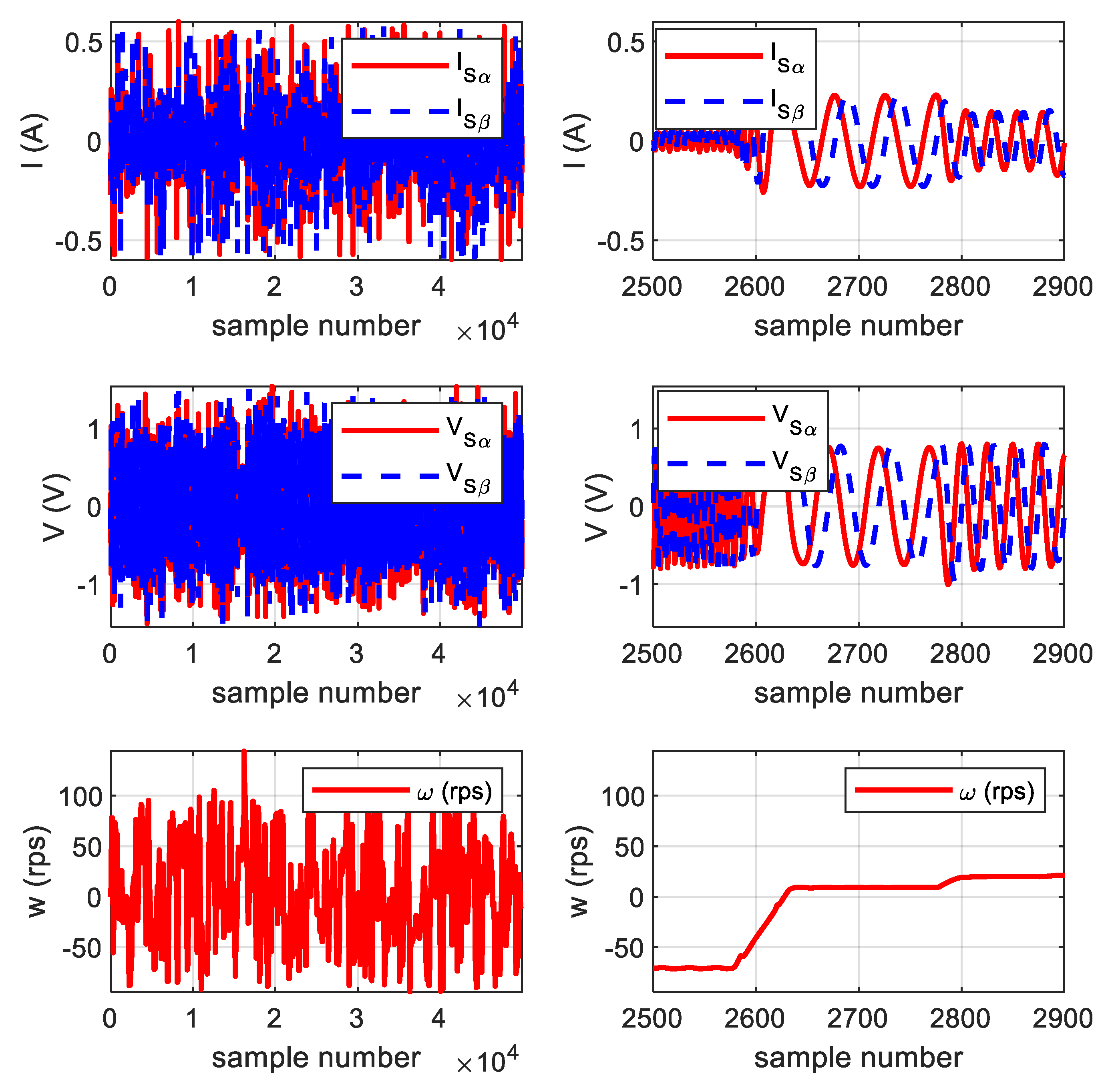
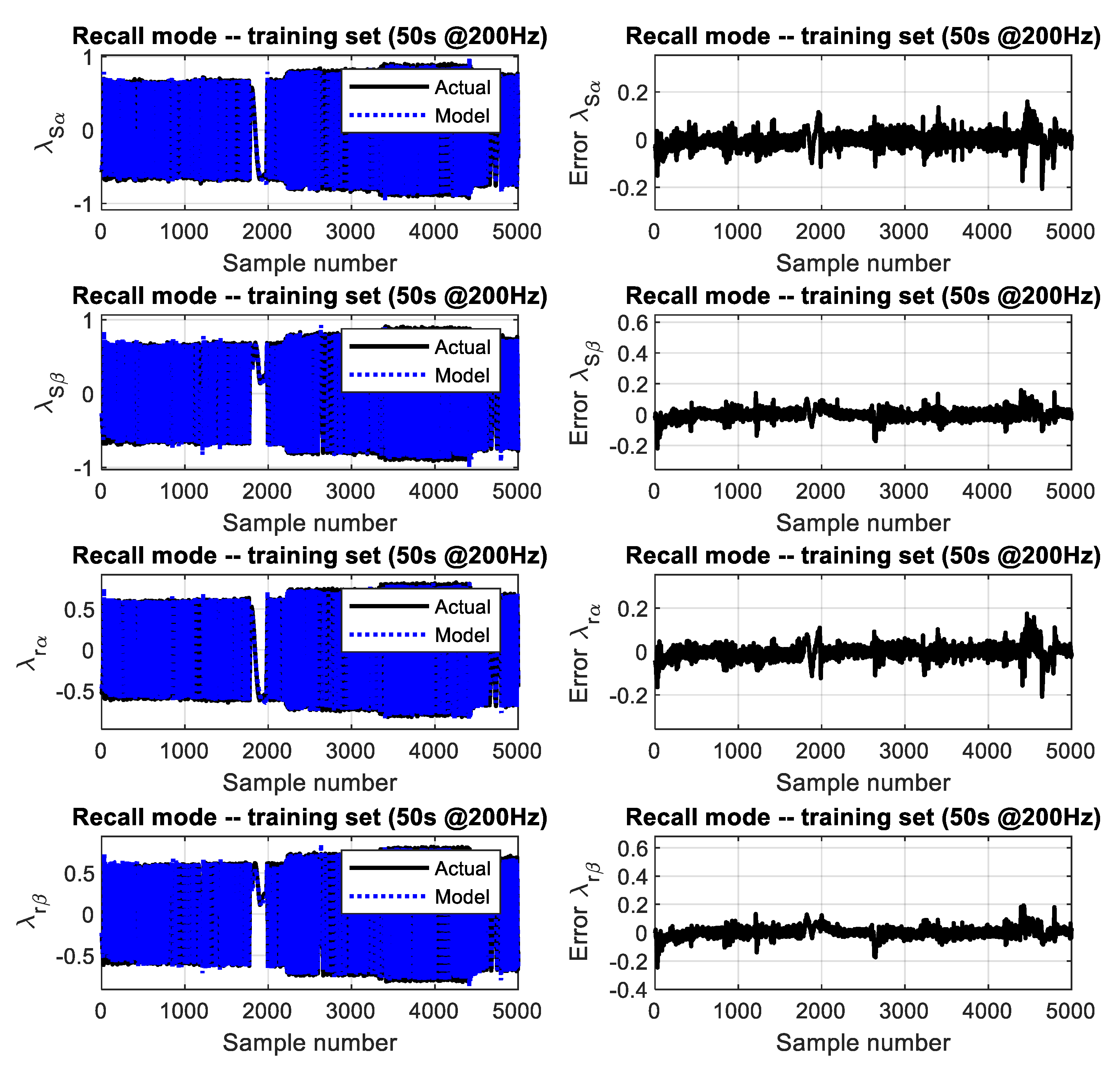
4.1. Step 1. Collecting Training Data
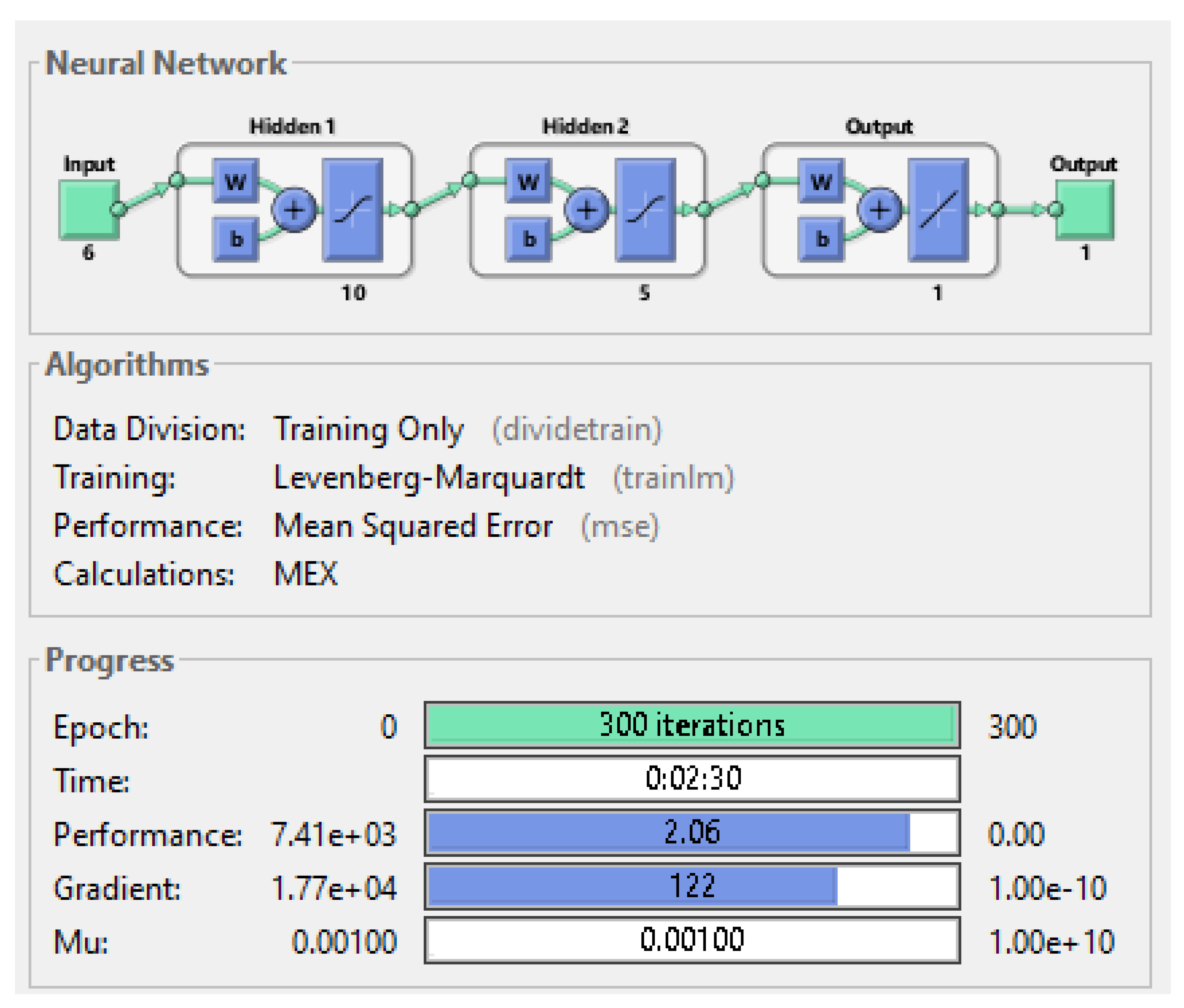
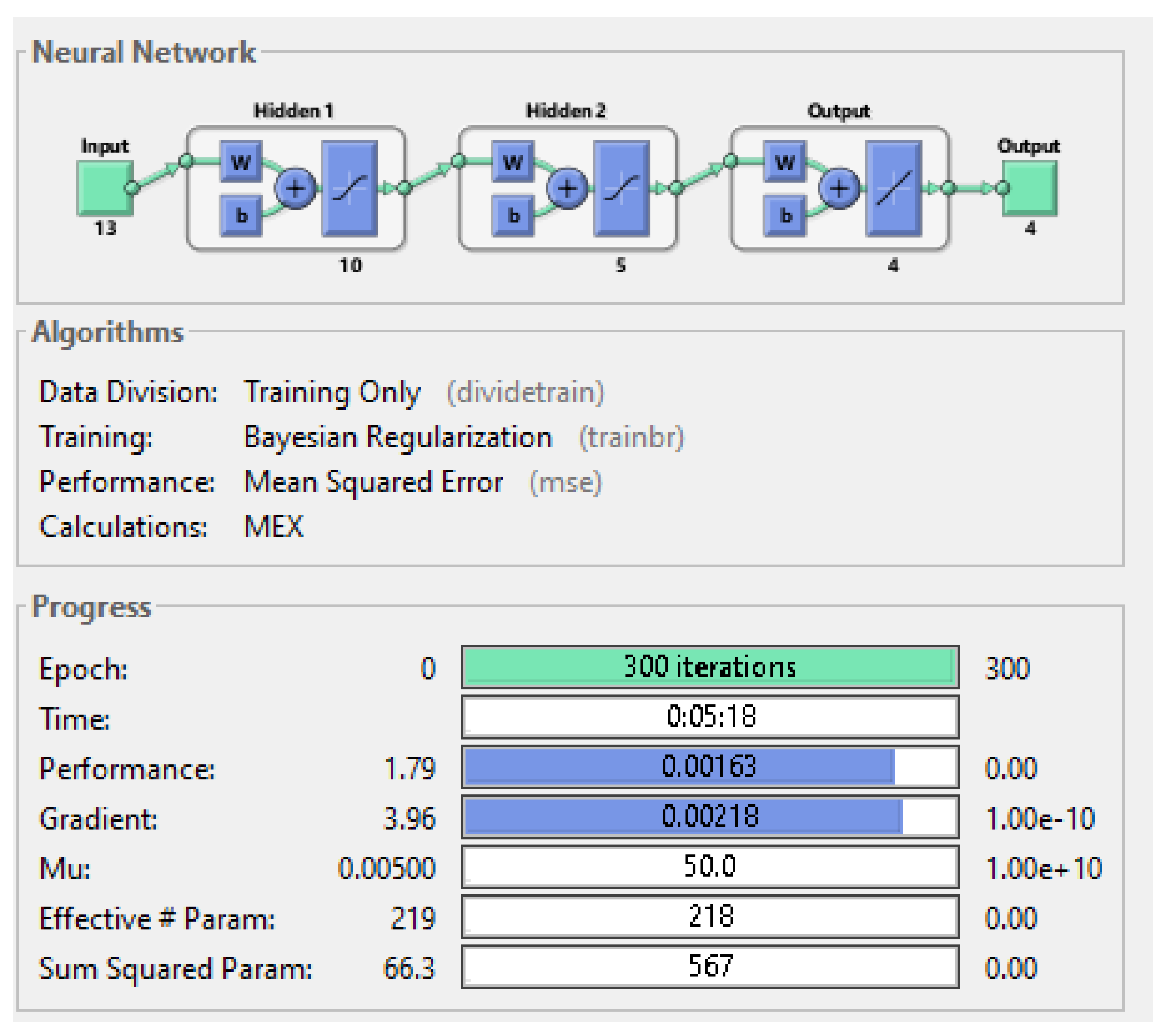
4.2. Step 2. Design ANN
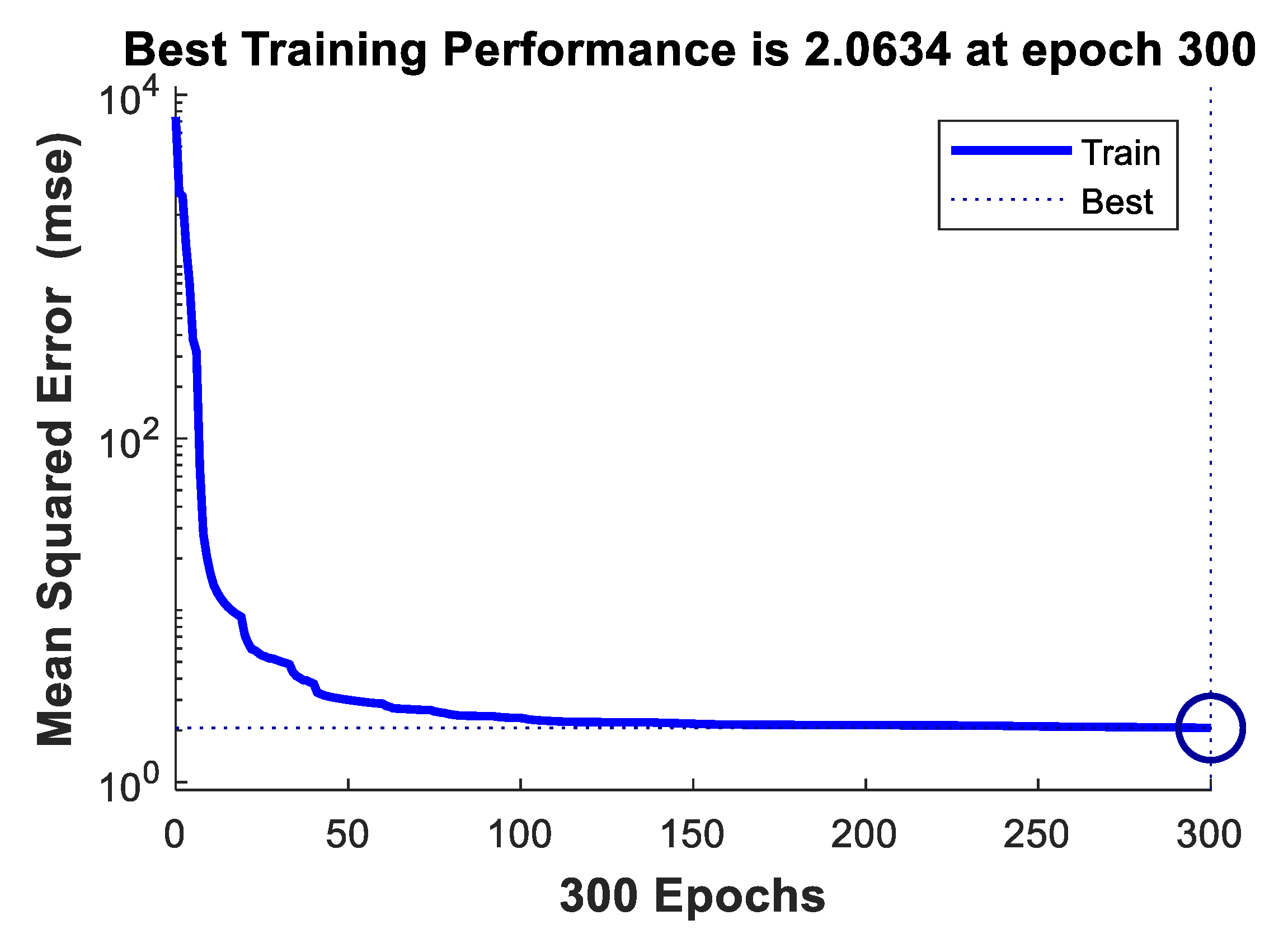
4.3. Step 3. Training ANNs
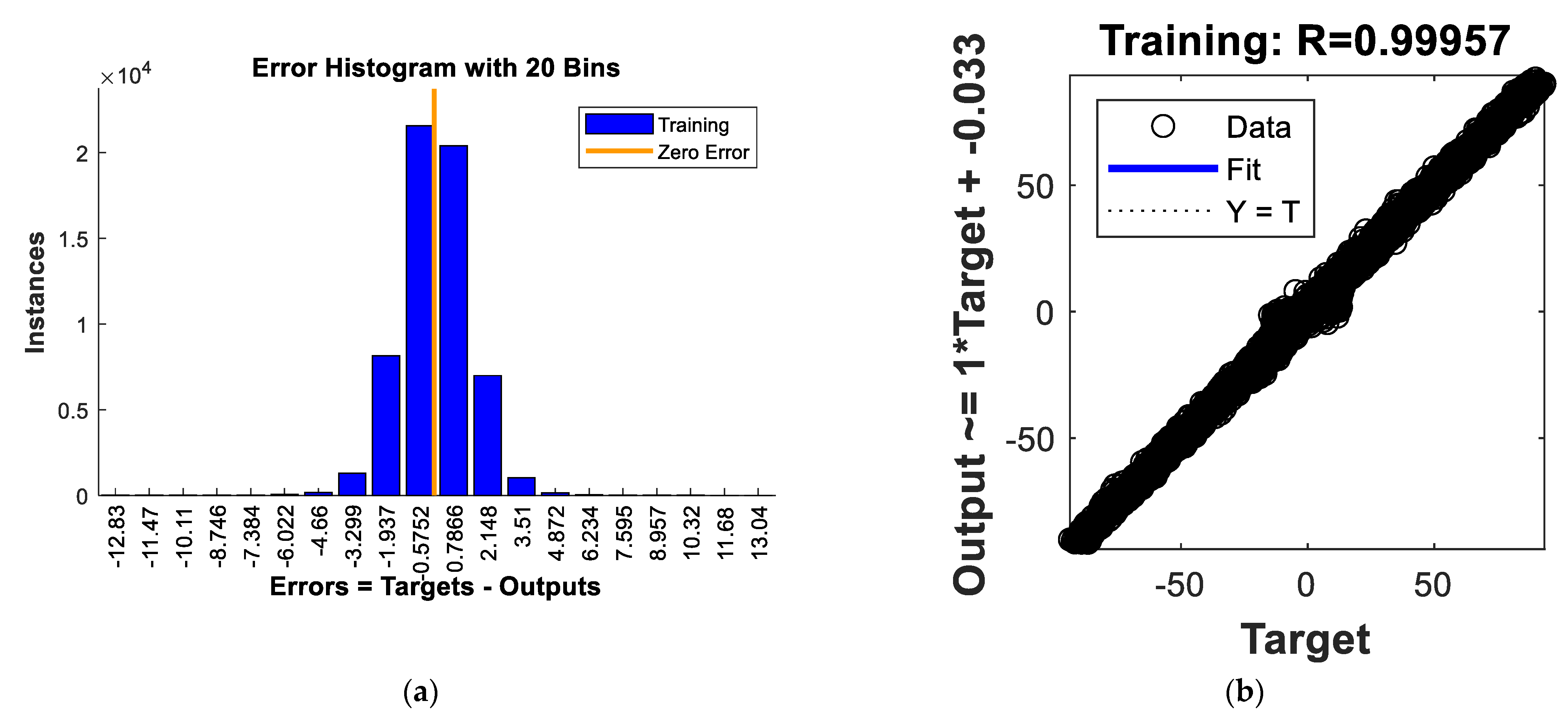
4.4. Step 4. Validation of the ANNs
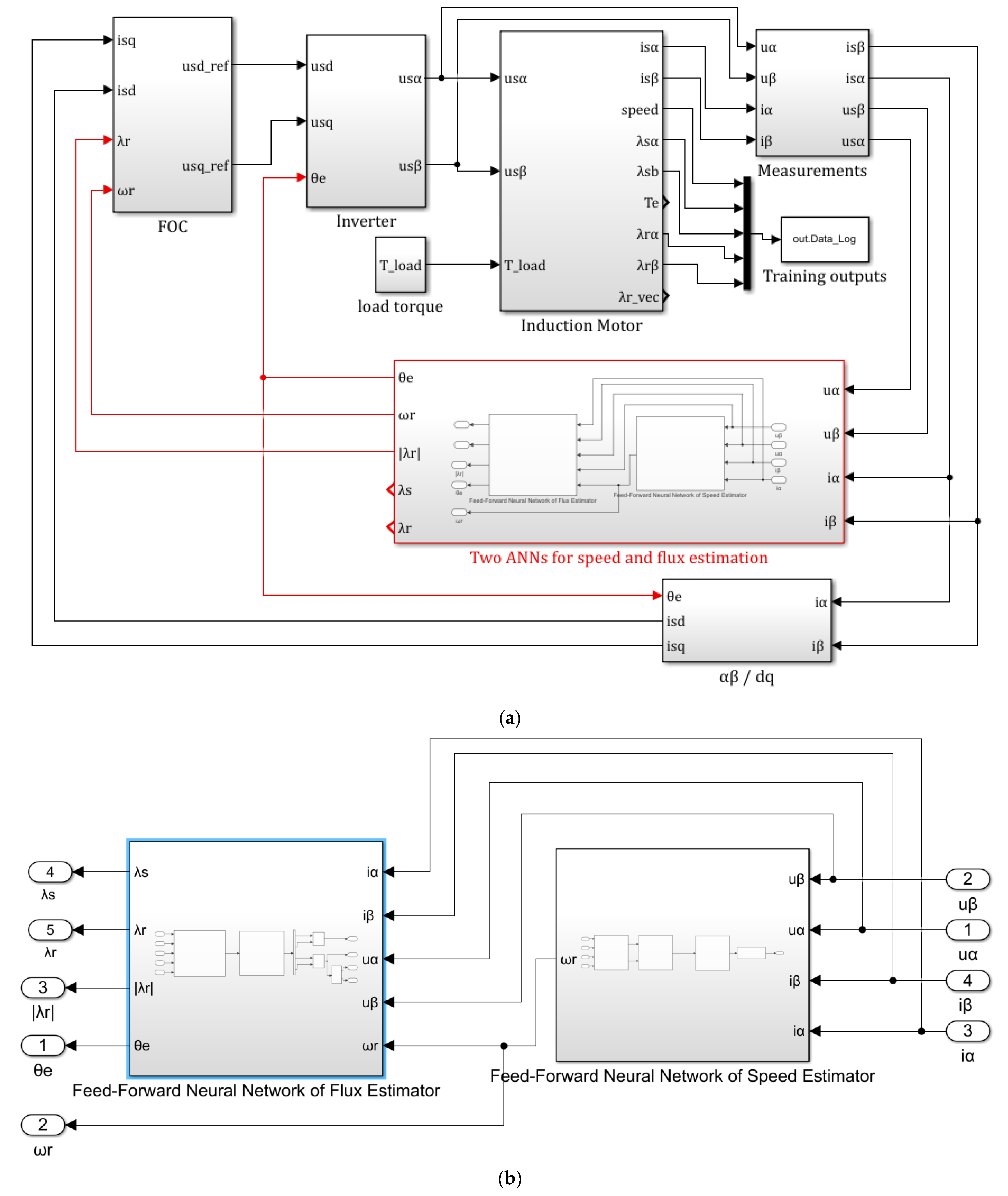
4.5. Step 5. Exporting the Simulink Block for the Two ANNs
- Implemented simulink Model of the direct vector controlled IM drive.
- Simulation simulink Model of the direct vector controlled IM drive.
- Collecting input signals of training and save it as input_signals.
- Collecting output signals of training and saving them as output_signals.
- Design NN as (net_speed = feedforwardnet ([10 5]); net_speed.layers.transferFcn = ‘tansig’; net_speed.layers.transferFcn = ‘tansig’; net_speed.layers.transferFcn = ‘purelin’; net_speed.trainFcn = 'trainbr'; net_speed.divideFcn = ’dividetrain’;).
- Configuration and traning of NN as (net_speed = configure (net_speed, input_signals, output_signals)).
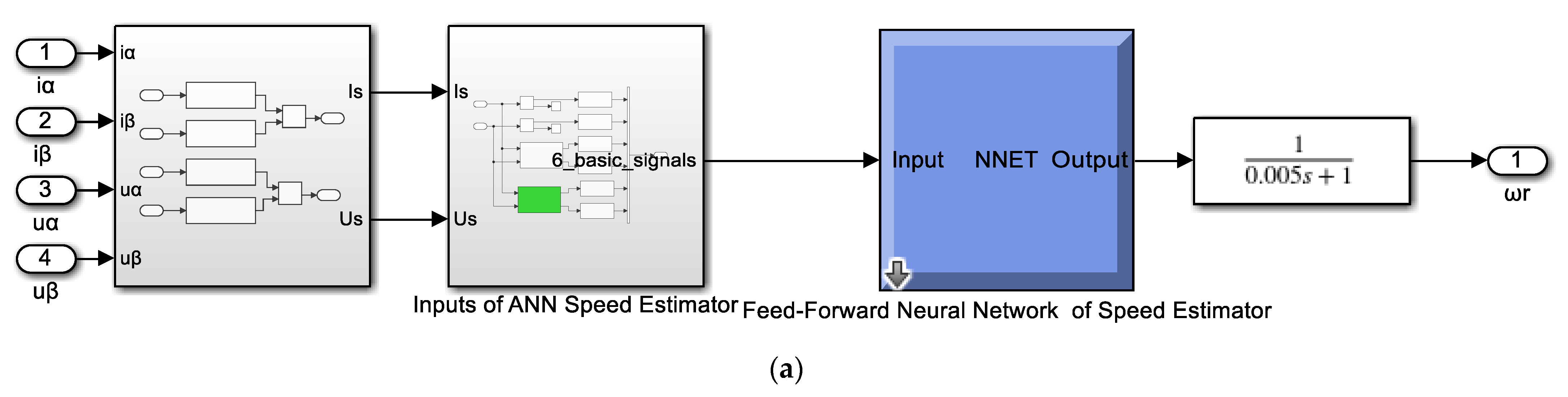
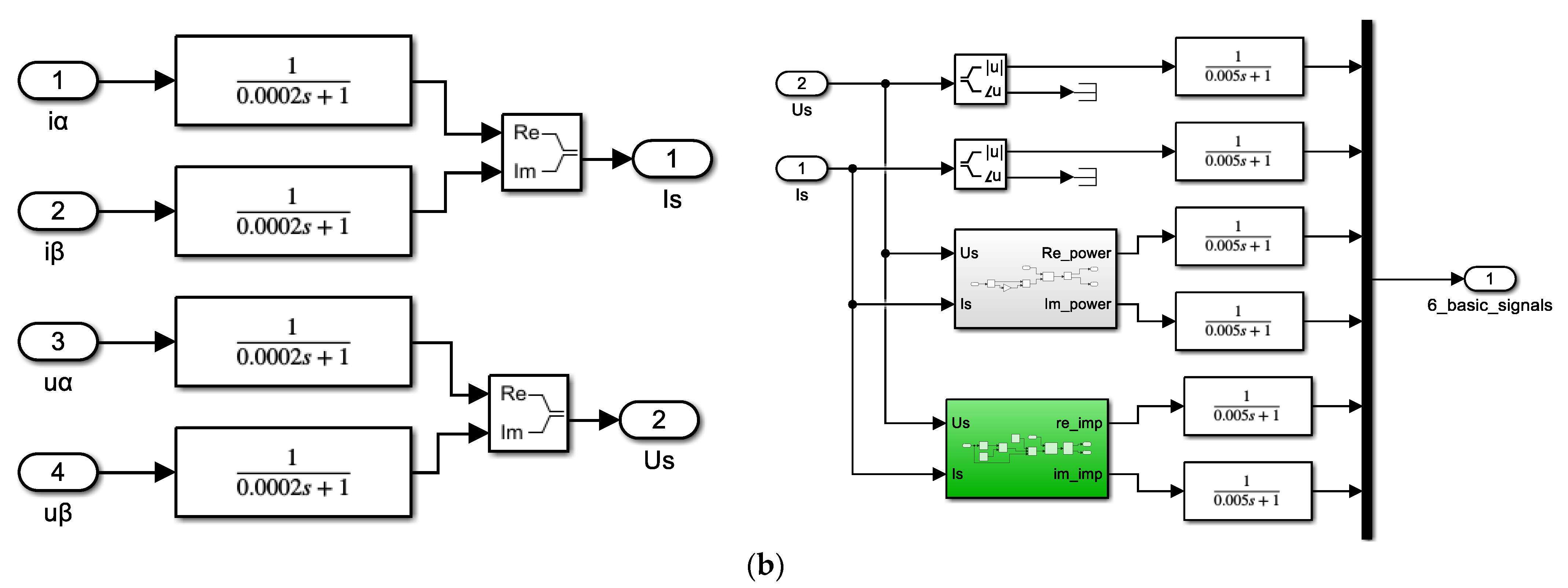
5. ANN Speed Estimator
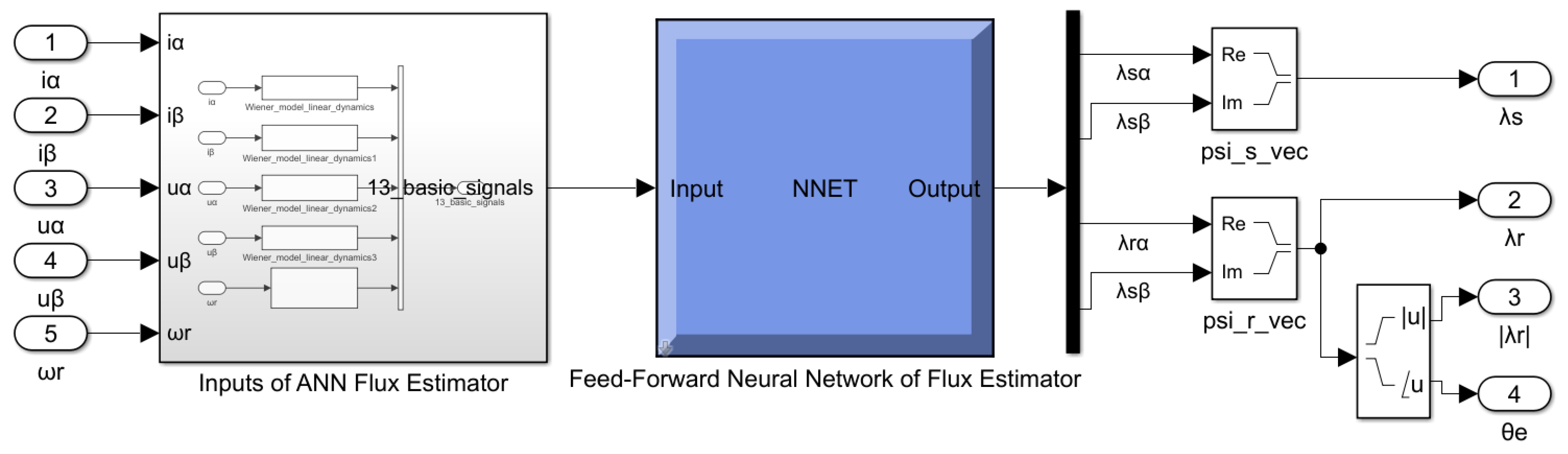
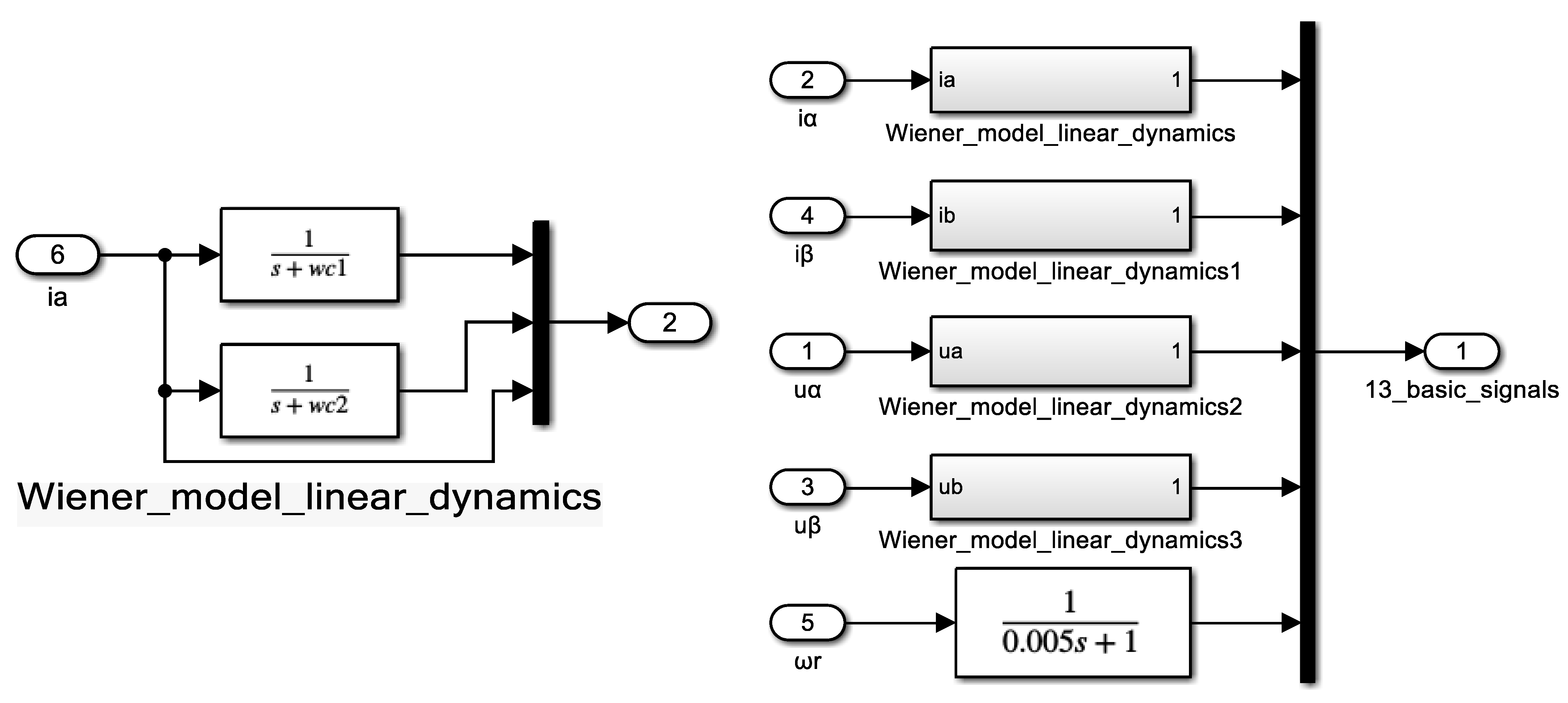
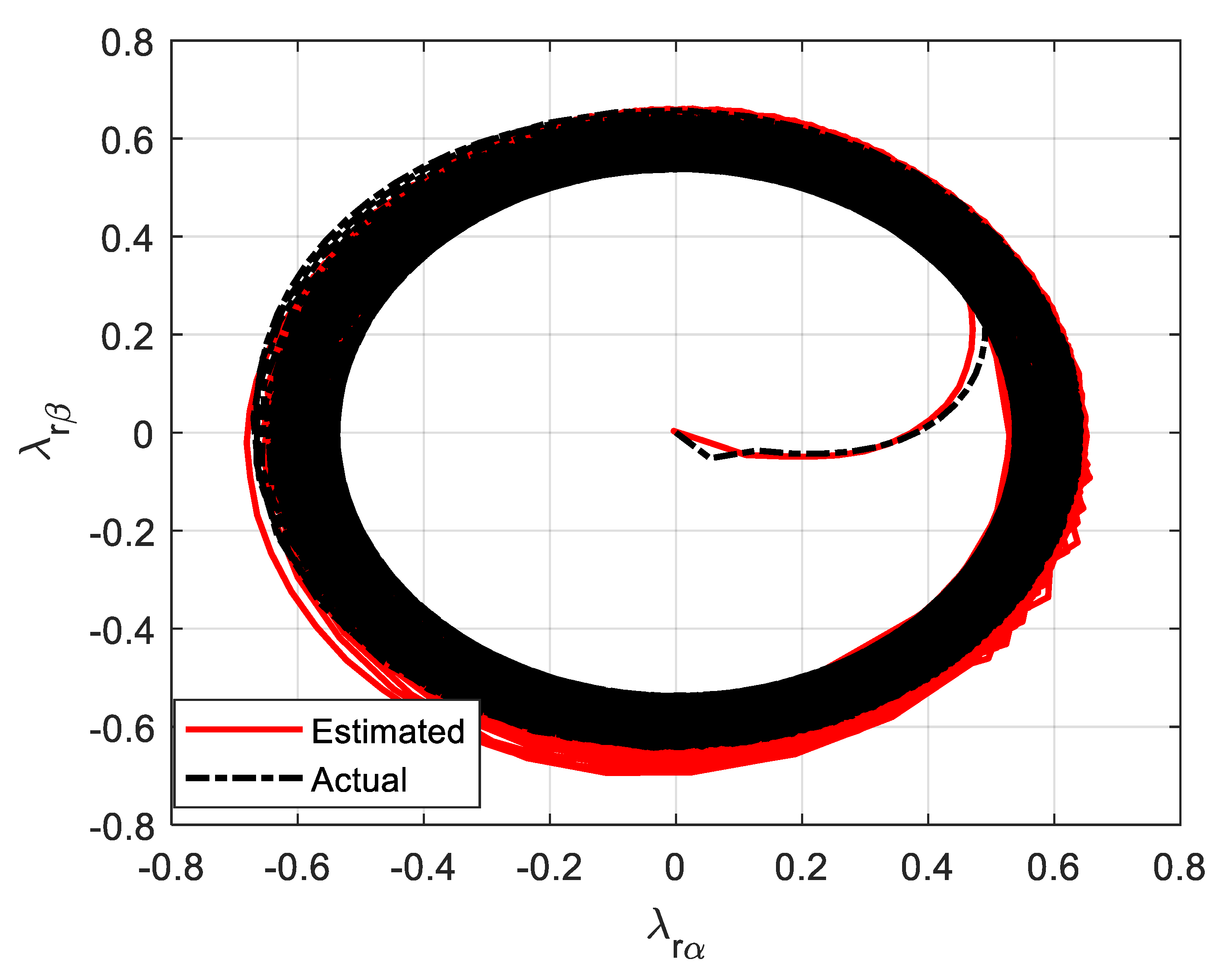
6. ANN Flux Estimator
7. Results and Discussions
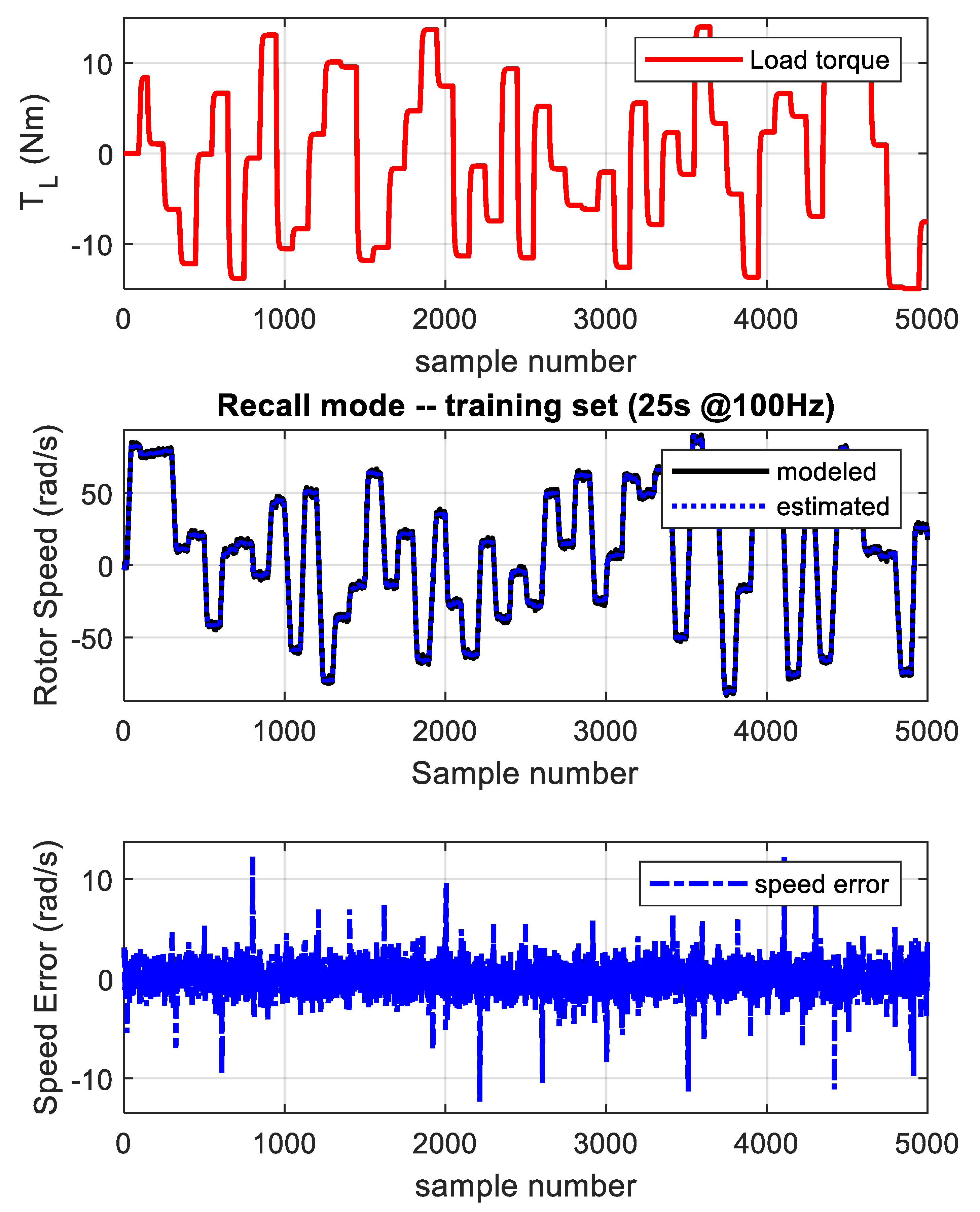
7.1. Case 1. Training Rotor Speed and Load Torque
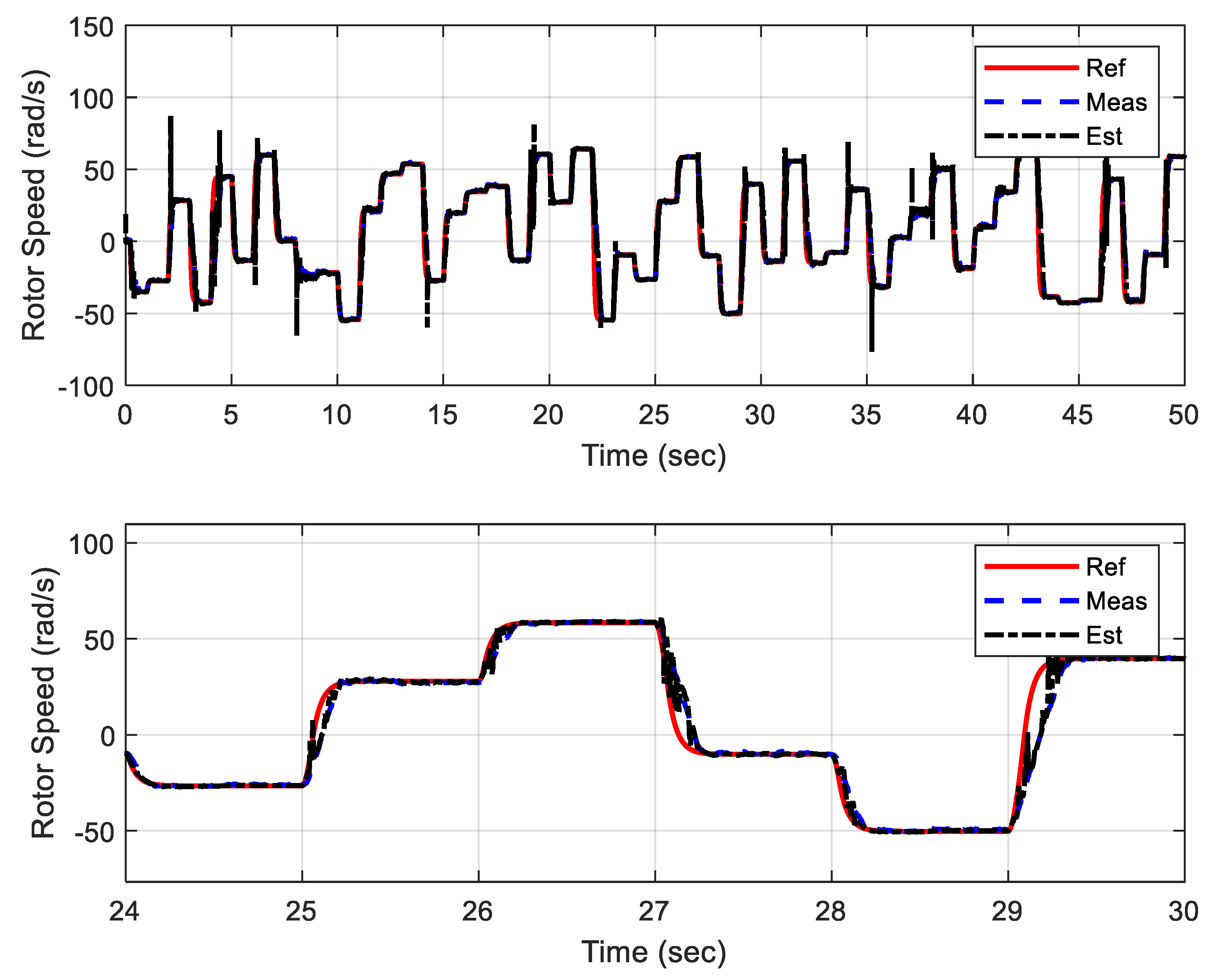
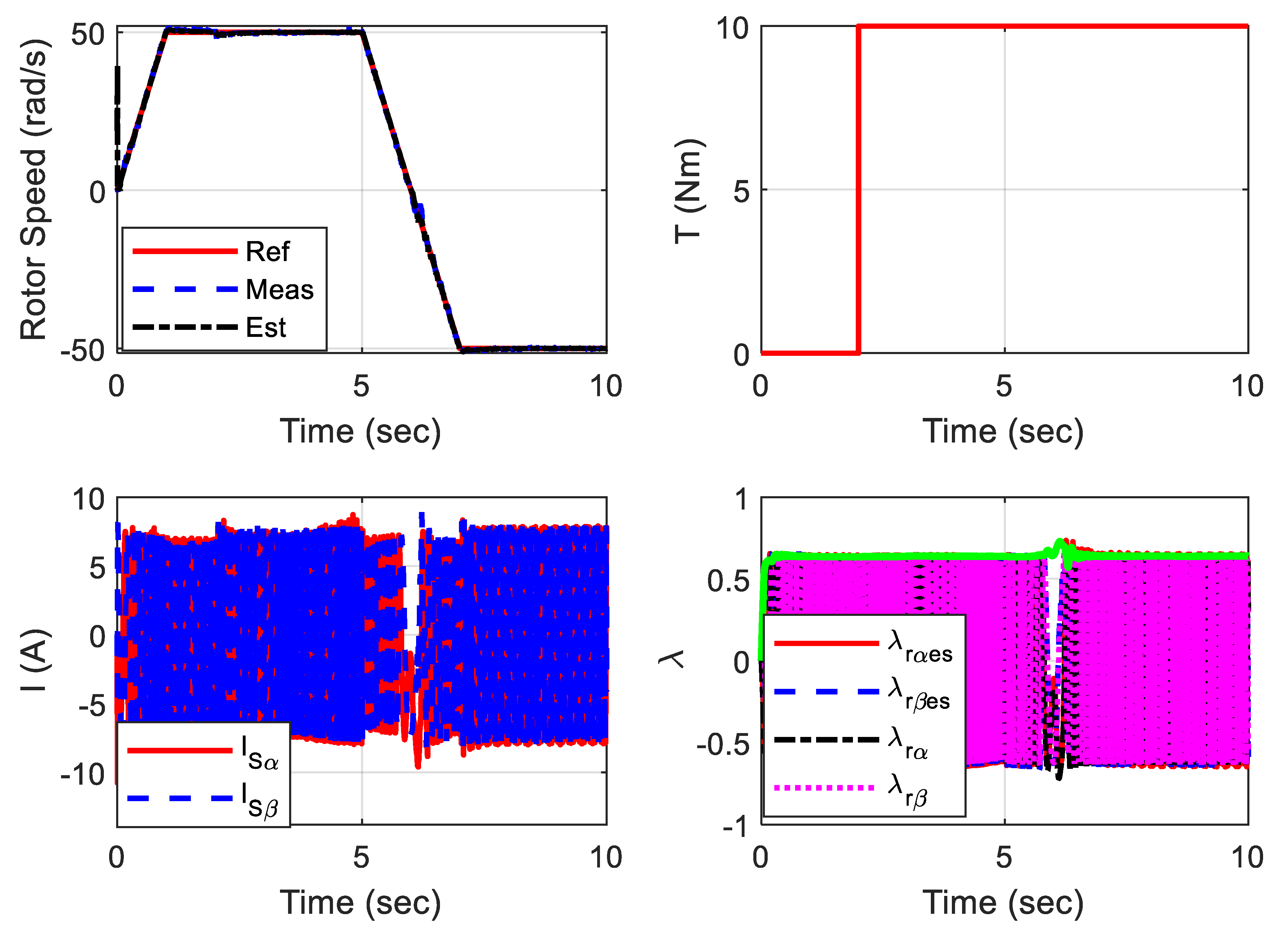
7.2. Case 2. Speed Reversal
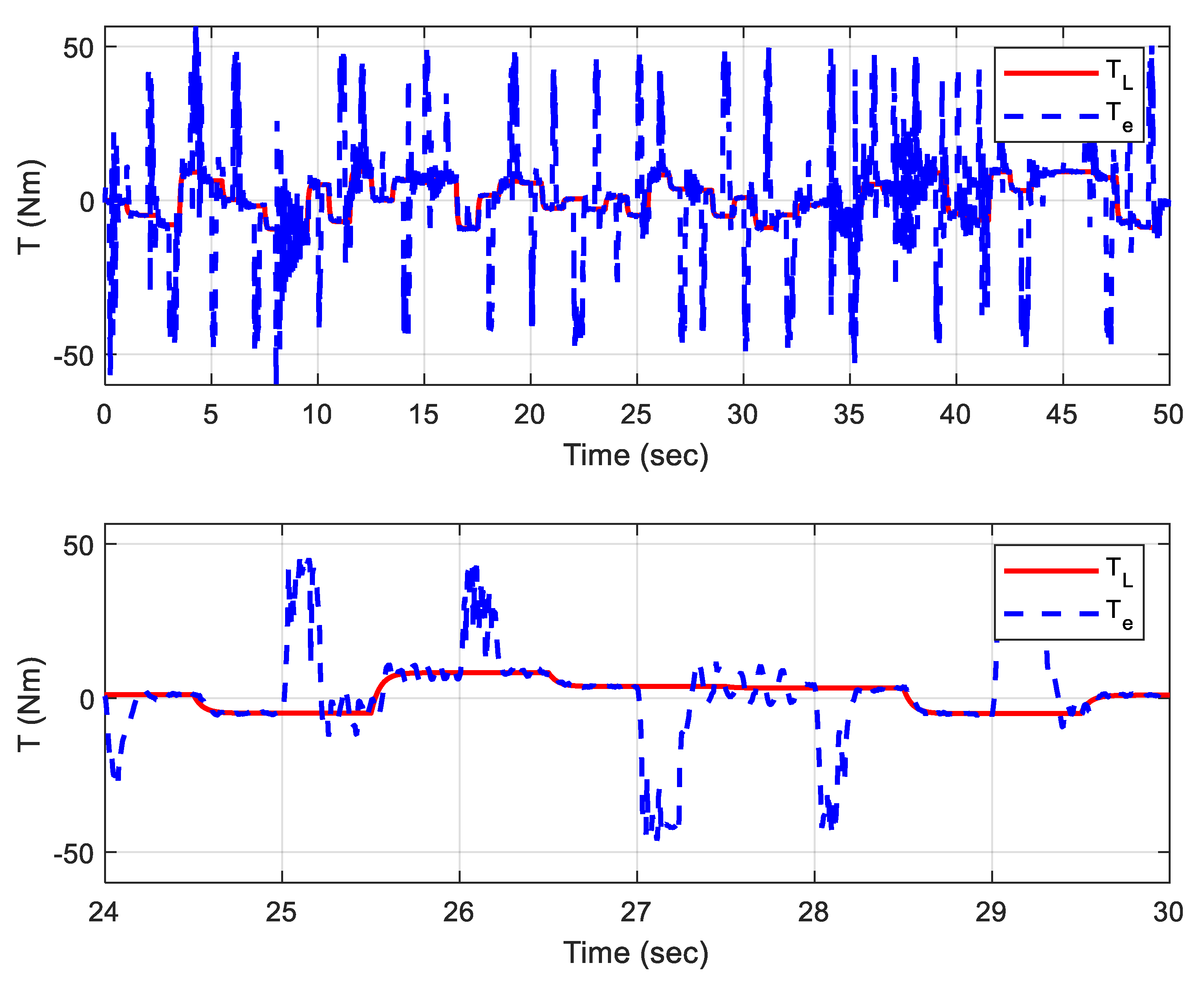
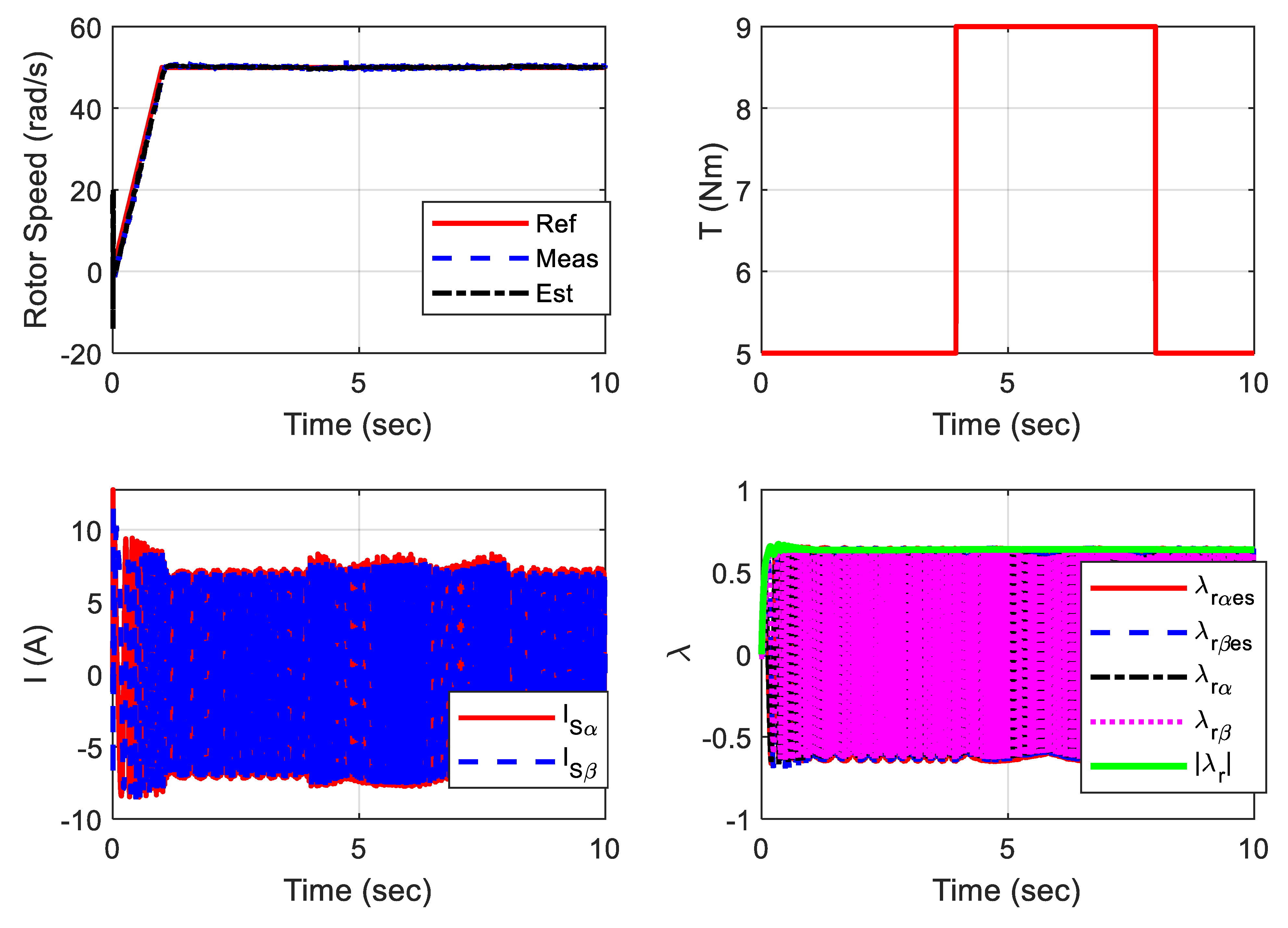
7.3. Case 3. Pulse Load Torque Disturbance
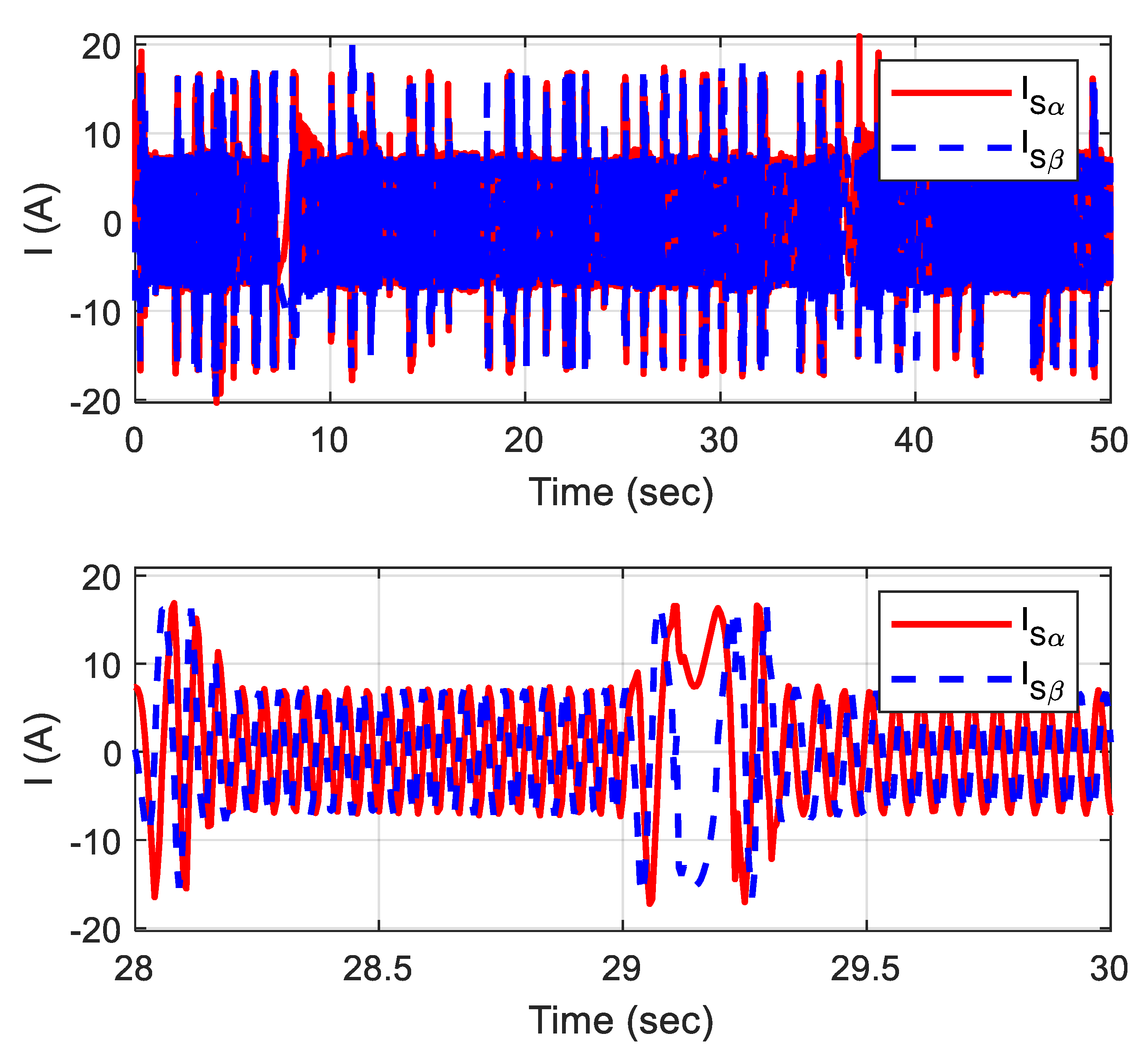
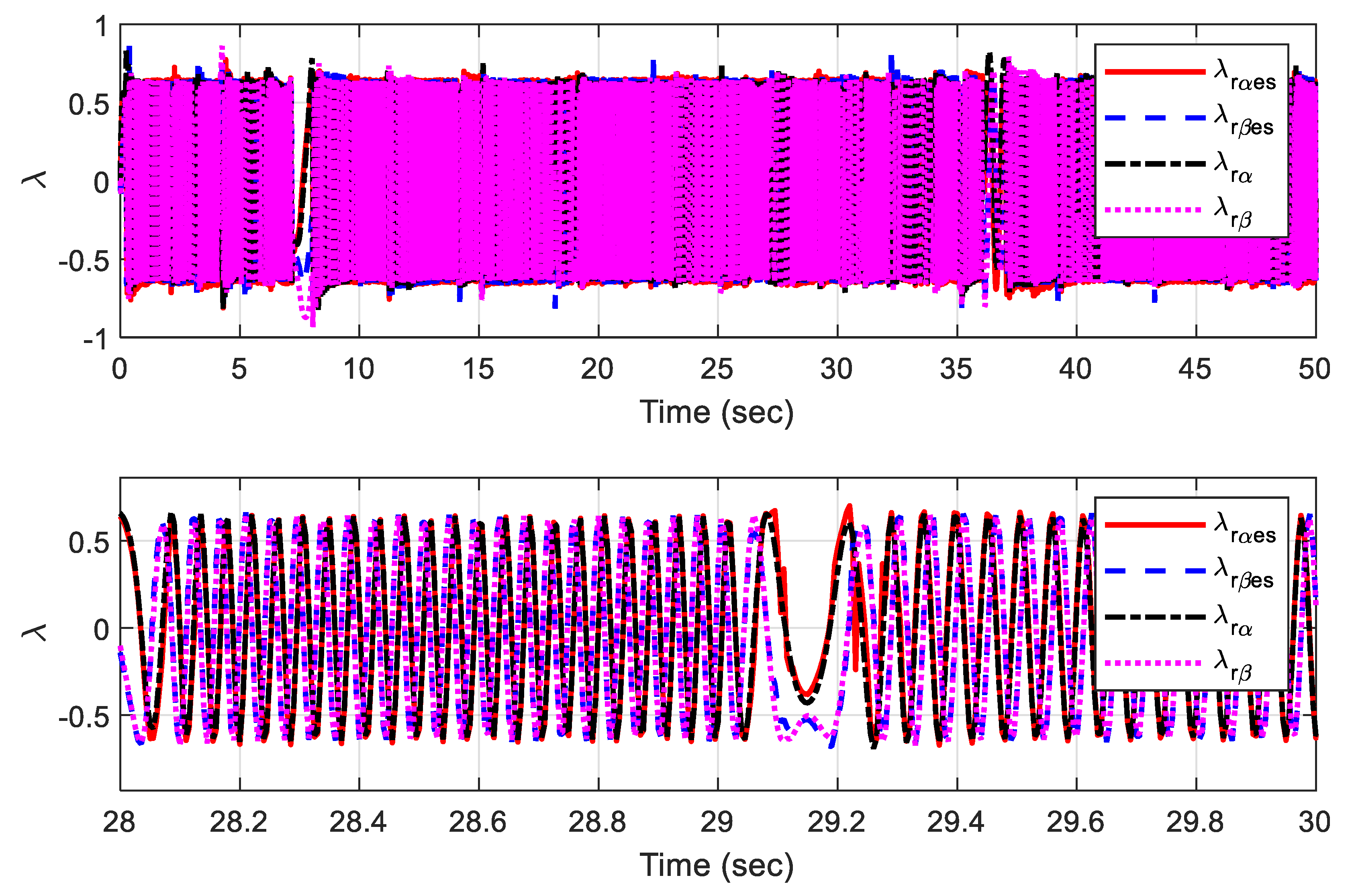
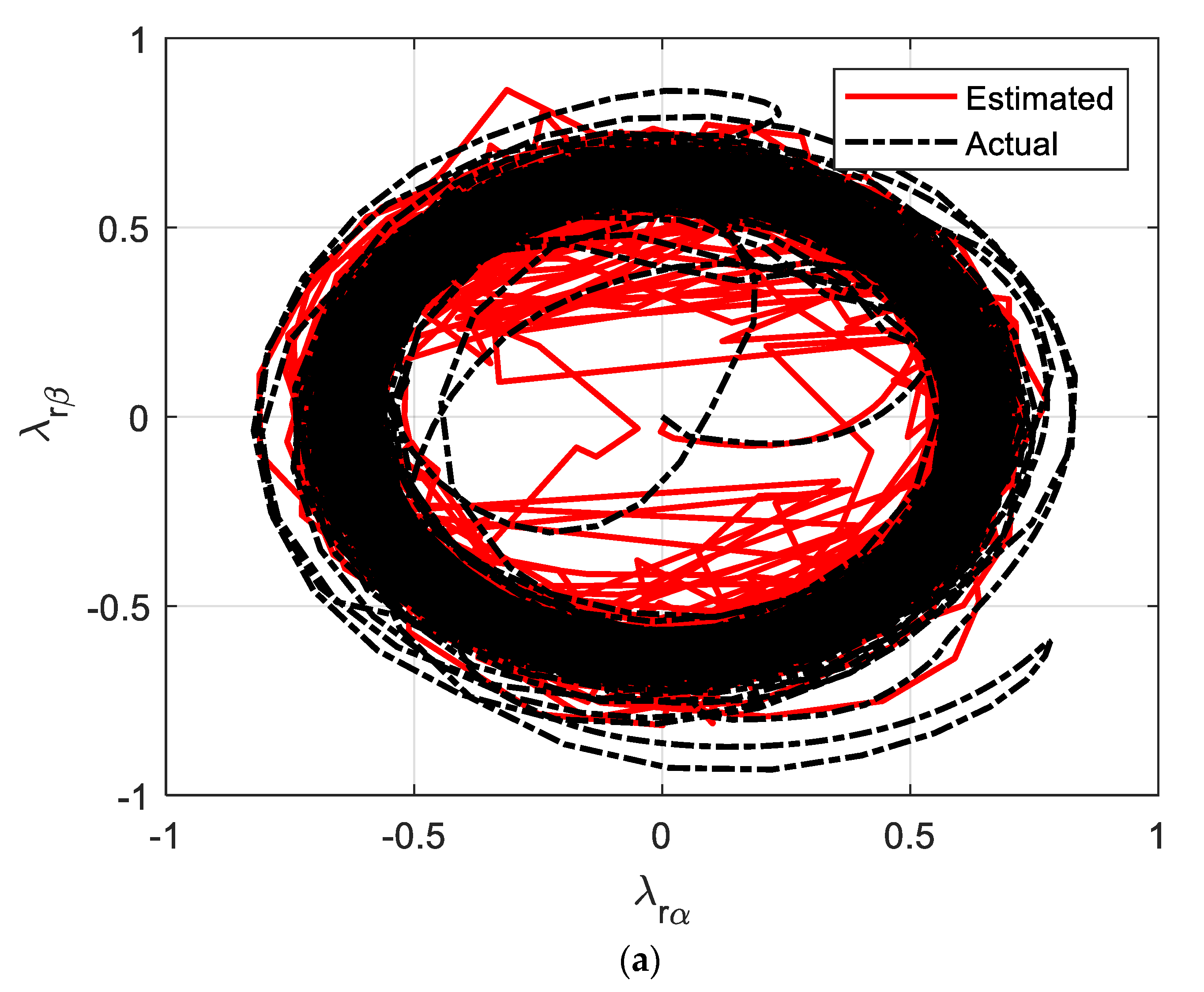
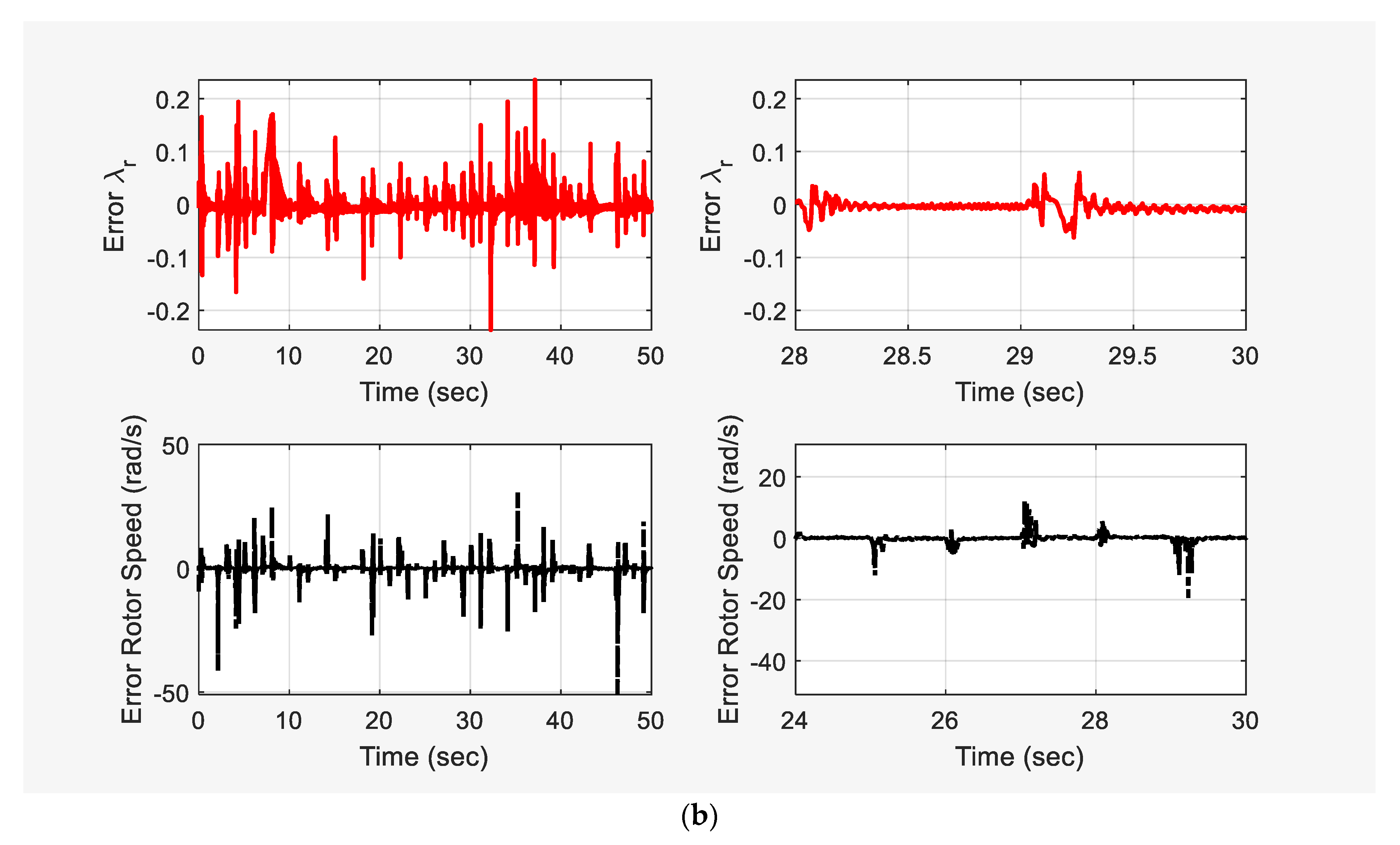
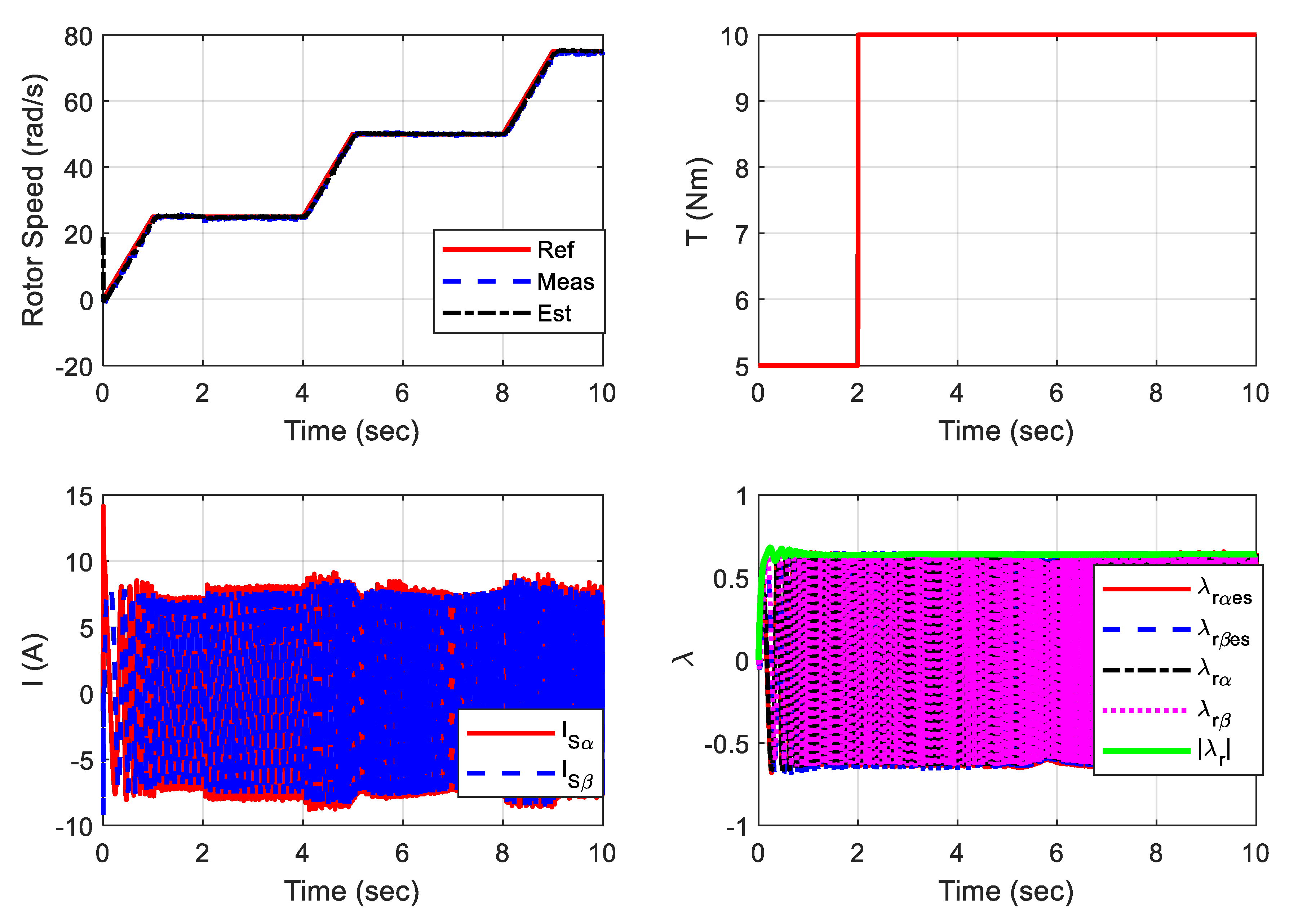
7.4. Case 4. Speed Variation
8. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated power (kW) | 1.5 | Rated voltage (V) | 127/220 |
| Rated current (A) | 12/6.9 | Rated frequency (Hz) | 60 |
| Rs (Ω) | 1.54 | Rr (Ω) | 1.294 |
| Ls (mH) | 100.4 | Lr (mH) | 96.9 |
| Lm (mH) | 91.5 | Rated rotor flux, (wb) | 0.6 |
| Jm (kg·m2) | 0.15 | Rated speed (rpm) | 930 |
| P | 3 |
References
- Mehrotra, P.; Quaicoe, J.E.; Venkatesan, R. Development of an artificial neural network based induction motor speed estimator. In Proceedings of the PESC Record 27th Annual IEEE Power Electronics Specialists Conference, Baveno, Italy, 23–27 June 1996. [Google Scholar] [CrossRef]
- Hu, J.; Wu, B. New integration algorithms for estimating motor flux over a wide speed range. IEEE Trans. Power Electron. 1998, 13, 969–977. [Google Scholar] [CrossRef]
- Karanayil, B.; Rahman, M.F.; Grantham, C. Online Stator and Rotor Resistance Estimation Scheme Using Artificial Neural Networks for Vector Controlled Speed Sensorless Induction Motor Drive. IEEE Trans. Ind. Electron. 2007, 54, 167–176. [Google Scholar] [CrossRef]
- Diab, A.A.Z.; Al-Sayed, A.-H.M.; Mohammed, H.H.A.; Mohammed, Y.S. Literature Review of Induction Motor Drives. In SpringerBriefs in Electrical and Computer Engineering; Springer: Singapore, 2020; pp. 7–18. [Google Scholar]
- Tiwari, A.; Kumar, B.; Chauhan, Y.K. ANN based RF-MRAS speed estimation of induction motor drive at low speed. In Proceedings of the 2017 International conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017. [Google Scholar] [CrossRef]
- Diab, A.A.Z.; Pankratov, V.V. Model predictive control of vector controlled induction motor drive. In Proceedings of the 2012 7th International Forum on Strategic Technology (IFOST), Tomsk, Russia, 18–21 September 2012. [Google Scholar] [CrossRef]
- Aziz, A.; Rez, H.; Diab, A. Robust Sensorless Model-Predictive Torque Flux Control for High-Performance Induction Motor Drives. Mathematics 2021, 9, 403. [Google Scholar] [CrossRef]
- Varga, T.; Benšić, T.; Štil, V.J.; Barukčić, M. Continuous Control Set Predictive Current Control for Induction Machine. Appl. Sci. 2021, 11, 6230. [Google Scholar] [CrossRef]
- Wlas, M.; Krzeminski, Z.; Toliyat, H.A.; Krzemiriski, Z. Neural-Network-Based Parameter Estimations of Induction Motors. IEEE Trans. Ind. Electron. 2008, 55, 1783–1794. [Google Scholar] [CrossRef]
- Blaschke, F. The principle of field orientation as applied to the new transvector closed loop system for rotating field machines. Siemens Rev. 1972, 39, 217–220. [Google Scholar]
- Grzesiak, L.M.; Ufnalski, B. DTC drive with ANN-based stator flux estimator. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar] [CrossRef]
- Çetin, O.; Dalcalı, A.; Temurtas, F. A comparative study on parameters estimation of squirrel cage induction motors using neural networks with unmemorized training. Eng. Sci. Technol. Int. J. 2020, 23, 1126–1133. [Google Scholar] [CrossRef]
- Pal, A.; Das, S. Development of energy efficient scheme for speed sensorless induction motor drive. Int. Trans. Electr. Energy Syst. 2020, 30, e12448. [Google Scholar] [CrossRef]
- Mehrotra, P.; Quaicoe, J.E.; Venkatesan, R. Speed estimation of induction motor using artificial neural networks. In Proceedings of the 1996 IEEE IECON. 22nd International Conference on Industrial Electronics, Control, and Instrumentation, Taipei, Taiwan, 9 August 1996. [Google Scholar] [CrossRef]
- Chitra, A.; Himavathi, S. A modified neural learning algorithm for online rotor resistance estimation in vector controlled induction motor drives. Front. Energy 2015, 9, 22–30. [Google Scholar] [CrossRef]
- Chen, J.; Huang, J.; Sun, Y. Resistances and Speed Estimation in Sensorless Induction Motor Drives Using a Model With Known Regressors. IEEE Trans. Ind. Electron. 2018, 66, 2659–2667. [Google Scholar] [CrossRef]
- Devanshu, A.; Singh, M.; Kumar, N. Nonlinear flux observer-based feedback linearisation control of IM drives with ANN speed and flux controller. Int. J. Electron. 2020, 108, 139–161. [Google Scholar] [CrossRef]
- Grzesiak, L.M.; Ufnalski, B. Neural stator flux estimator with dynamical signal preprocessing. In Proceedings of the 2004 IEEE Africon. 7th Africon Conference in Africa (IEEE Cat. No.04CH37590), Gaborone, Botswana, 15–17 September 2004. [Google Scholar] [CrossRef]
- Bensalem, Y.; Abdelkrim, M.N. A sensorless neural model reference adaptive control for induction motor drives. In Proceedings of the 3rd International Conference on Signals, Circuits and Systems (SCS), Medenine, Tunisia, 6–8 November 2009. [Google Scholar] [CrossRef]
- Chitra, A.; Himavathi, S. Investigation and analysis of high performance green energy induction motor drive with intelligent estimator. Renew. Energy 2016, 87, 965–976. [Google Scholar] [CrossRef]
- Grzesiak, L.M.; Meganck, V.; Sobolewski, J.; Ufnalski, B. Genetic Algorithm for Parameters Optimization of ANN-based Speed Controller. In Proceedings of the EUROCON 2007—The International Conference on “Computer as a Tool”, Warsaw, Poland, 9–12 September 2007. [Google Scholar] [CrossRef]
- Kowol, P.; Szczygieł, M.; Sciuto, G.L.; Capizzi, G. Modeling of Magnetorheological Fluids Relative Magnetic Permeability by using a Neural Network approach. In Proceedings of the 2020 IEEE 20th Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020; pp. 25–28. [Google Scholar]

























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diab, A.A.Z.; Elsawy, M.A.; Denis, K.A.; Alkhalaf, S.; Ali, Z.M. Artificial Neural Based Speed and Flux Estimators for Induction Machine Drives with Matlab/Simulink. Mathematics 2022, 10, 1348. https://doi.org/10.3390/math10081348
Diab AAZ, Elsawy MA, Denis KA, Alkhalaf S, Ali ZM. Artificial Neural Based Speed and Flux Estimators for Induction Machine Drives with Matlab/Simulink. Mathematics. 2022; 10(8):1348. https://doi.org/10.3390/math10081348
Chicago/Turabian StyleDiab, Ahmed A. Zaki, Mohammed A. Elsawy, Kotin A. Denis, Salem Alkhalaf, and Ziad M. Ali. 2022. "Artificial Neural Based Speed and Flux Estimators for Induction Machine Drives with Matlab/Simulink" Mathematics 10, no. 8: 1348. https://doi.org/10.3390/math10081348