2.1. Cooperative TU Games
A cooperative n-person game with transferable utility (TU game) is a pair where is the set of players and, denoting as the set of all possible coalitions, , verifying , is the characteristic function. For each , is the worth obtained by players in S if they cooperate.
We will denote by
the vector space of all TU games with
N fixed. In
, the family
with
is the
unanimity games basis. Each
v can be written uniquely as:
where the coefficients
are the
Harsanyi dividends [
8].
A TU game is zero-normalized if for all . We will denote with the subspace of consisting of all zero-normalized games with player set N. A basis for is given by the games with and . In the following, for each , s represents the cardinality of S.
An allocation rule in is a map . For each , represents the outcome or payoff for player in the game .
One of the more prominent allocation rules for TU games was proposed by [
2], later called the Shapley value. It assigns to each player the following weighted mean of his marginal contributions to different coalitions:
2.2. Graphs
A or a is a pair in which is the set of nodes and , which is the complete graph. denotes the set of all graphs with node set N. A of is a graph with . The restriction of the graph to is the graph with
We will say that two nodes i and j are directly connected in , if . If i and j are not directly connected, they might be connected using a sequence of nodes (intermediaries) with , , and such that , for .
A connected component, C, in the graph is a maximal connected subset. We will denote by the partition of N in connected components in , and by the set of the connected components of S in . The graph is connected if the cardinality of is 1. Similarly, a set is connected in if . We will consider to be connected whenever .
2.3. Communication Situations and Allocation Rules
Ref. [
1] introduced the possibility that players in a TU game have restrictions in their communication given by a graph. This model is known as a communication situation and it is mathematically formalized by means of a triple
,
being a TU game and
being a graph.
will denote the set of all communication situations with player–node set
and
will denote the subset of those elements in
in which the game is zero-normalized.
An allocation rule on is a map , representing the outcome for player i in .
Ref. [
1] also defined the graph-restricted game for a communication situation
as the TU game
with the characteristic function given by:
In this restricted game, the worth of a coalition is the sum of the worths of its maximally connected subcoalitions. As an allocation rule for communication situations, he introduced the Myerson value, obtained by applying the Shapley value to the graph-restricted game.
In [
1]’s framework, for communication situations in
, Refs. [
4,
5] introduced a
link game where the undirected edges (or links) are the players, and the worth of every coalition (of links) is determined by what the grand coalition of all players
N can earn if exactly the links in that coalition are present. Formally, given a communication situation
, the associated link game is the game
with the characteristic function given by:
They proposed another allocation rule, the position value
, that assigns to a player
i in a communication situation half of the sum of the Shapley values of the links (in the link game) incident with it. Thus, this allocation rule is given by:
where, for
and
,
is the set of links incident with
Ref. [
6] characterized the position value in terms of the following two properties.
An allocation rule
on
satisfies
component efficiency [
1] if,
and all
.
An allocation rule
on
satisfies
balanced link contributions [
6] if,
and all
,
where
is the subgraph of
obtained when the relation
l is broken.
2.4. Directed Graphs or Digraphs
A digraph (directed graph) is a pair (occasionally D when there is no ambiguity with respect to N), where is a (finite) set of nodes and is a binary relation on N. Each is an directed edge or arc, and i and j are called endpoints, the tail and the head, respectively. It is said that i is a predecessor of j and j a successor of i.
We will assume the digraph to be (i) irreflexive, i.e., with no loops (edges with equal endpoints), and (ii) simple, i.e., with no multiple edges (those having identical tails and identical heads). denotes the set of all irreflexive, simple digraphs with node set N.
Given and , is the set of directed edges in in which i is the tail, and is the set of directed edges in in which i is the head. Moreover, given and , the out-degree, (respectively, the in-degree, ) is the number of edges with i as the tail (respectively, i as the head). Further, is the degree of node i in .
The total out-degree, respectively, the total in-degree, in the digraph , will be denoted by , respectively, . It is easy to see that as every edge has one tail and one head.
The
relative out-degree of node
i in
, denoted
, is defined as
Similarly,
denotes the
relative in-degree of node
in the digraph
.
A subdigraph of is a digraph with . The restriction of to is the directed graph in which . For , we will abuse notation to indicate the nodes incident with the edges in L, i.e., . Notice that the restriction coincides with .
Given a digraph , a (directed) path from i to j is a sequence of distinct nodes with , and such that for . We assume that , , is a path. For convenience, we will sometimes abuse the notation to denote the set of nodes of a path , and thus .
A Hamiltonian path is a path that visits each node exactly once. Thus, if is a Hamiltonian path, then and .
Given two paths and in , with , we say that P is a subpath of Q, denoted by , if for each there exists such that and . Notice that is a partial order in the set of paths of . A path P in is maximal if it is maximal for this defined order, meaning that P is a path in and there is no other path Q in such that . We will denote by the set of all maximal paths of for . Similarly, for , we denote the family of the maximal paths in by .
Given a digraph and , we say that a path P in is a connection path of S in if . We will say that a path P is a minimal connection path of S in if P is a connection path of S and there does not exist another connection path of S such that By , we will denote the family (occasionally empty) of all minimal connection paths of S in .
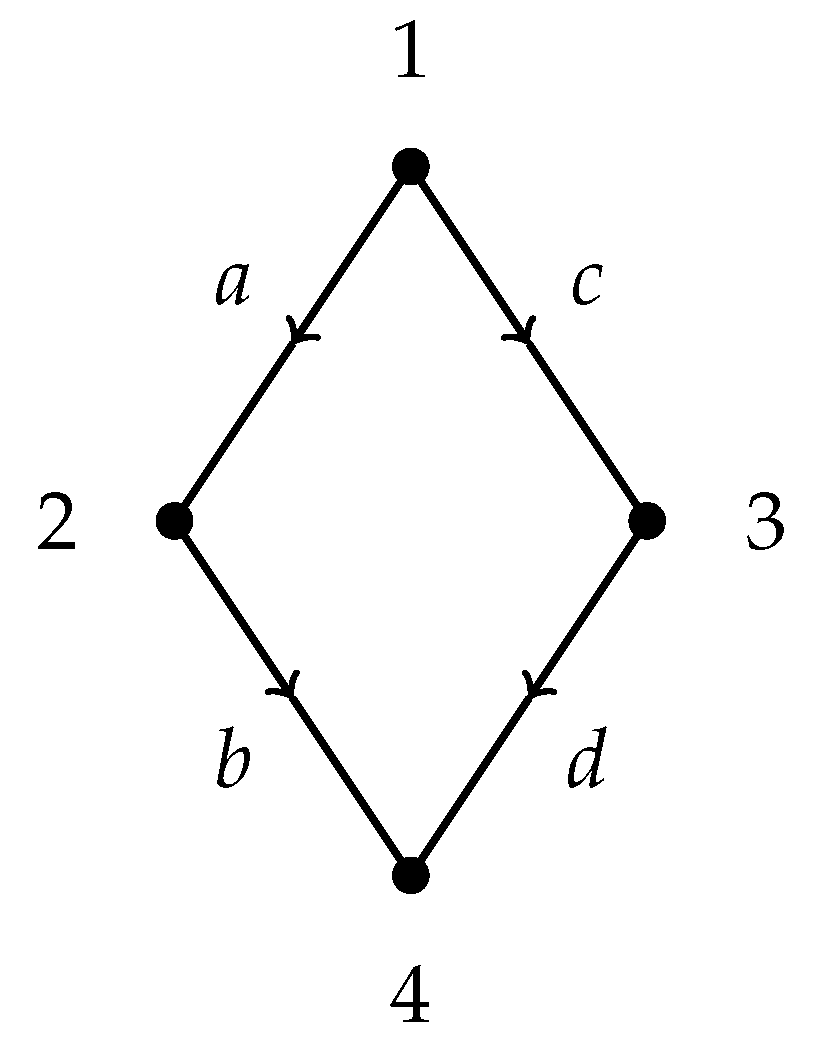
We illustrate these notions with an example.
Example 1 ([
7]).
Consider the digraph with , and ; see Figure 1.In this case, the set of maximal paths in isand in for is There is no Hamiltonian path in



{kind=link}
