1. Introduction
The bodies of animals and plants are naturally designed in helicoidal arrangement to resist and protect them from enemies. This arrangement provides their bodies with excellent mechanical properties, which inspires researchers and scientists to design a man-made composite structure in the same way. Helicoidal structure, known as “Bouligand structure”, is one of the exceptional and predominant arrangements noted in exoskeletons of the arthropod, crustaceans, sapidus, and insects. The helicoidal structures are portrayed by gradually changing the rotation angle of each lamina in the bulk unit [
1]. In the case of helicoidal arrangement, the discontinuity of in-plane shear properties gradually decreases. Therefore, the debonding resistance, toughness, strength, and damage tolerance can be improved and designed [
2]. Liu et al. [
3] illustrated that the delamination resistance increases by decreasing the inter-ply angles in helicoidal laminates. Therefore, the helicoidal composite laminated (COL) structure has been exploited for numerous anti-impact applications, such as tanks, warcraft, warship, and blades of turbine [
4]. Moreover, they may be used as alternatives for classical orthotropic laminated structures, which are used in many mechanical, military, civil, aerospace, and aeronautics industries [
5].
Cheng et al. [
1] and Shang et al. [
6] examined the response of bio-inspired helicoidal composite beams with different orientation angles under the transverse point load. Grunenfelder et al. [
7] and Jiang et al. [
4] experimentally analyzed the impact resistance of helicoidal composite panels. Ginzburg et al. [
8] explored the damage tolerance of helicoidal composite panels due to the low velocity impact and proved that they have the ability to sustain a transverse load up to 73%, which is more than the cross-ply scheme. Yang et al. [
9] experimentally and numerically studied the multiscale finite element model, low-velocity impact response, and energy absorption capacity of bio-inspired CFRP laminates. Golewski [
10] developed a special construction and material conditions to decrease the drawbacks of vibrations on concrete structures. Gul and Aydogdu [
11] studied mechanical behaviors of Timoshenko nanobeams using the doublet mechanics theory. Yang et al. [
12] and Yin et al. [
13] presented a theoretical analysis to investigate the crack-driving force and toughening mechanism of bio-inspired helical structures. Lyratzakis et al. [
14] reduced the induced vibrations due to the high-speed train on adjacent reinforced concrete buildings using single or double expanded polystyrene geofoam-filled trenches.
The geometries of beam, plate, and shell are not completely flat, but have small imperfections and curvatures [
15]. Lacarbonara et al. [
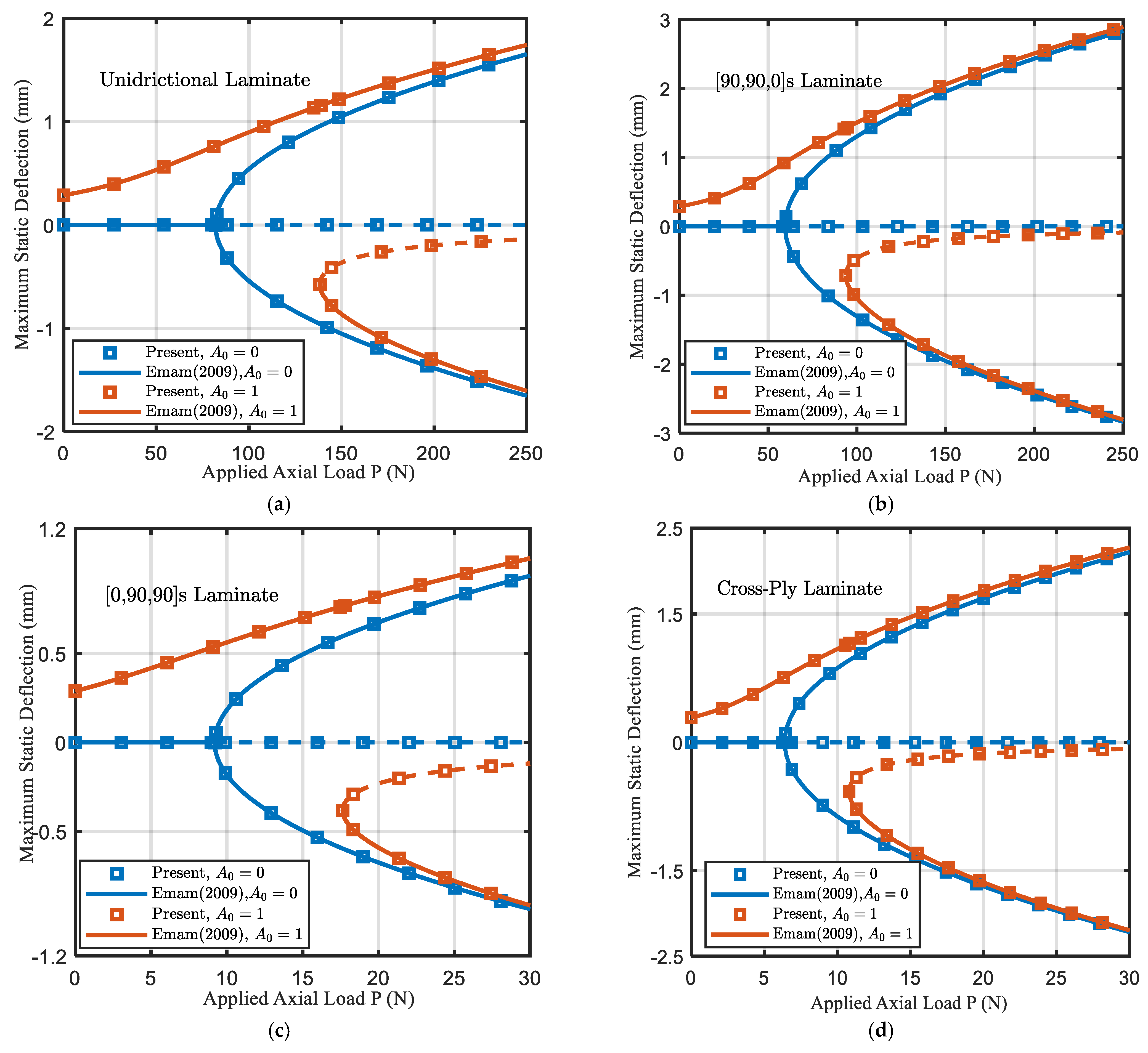
16] explored the two modes that are activated around a veering of frequencies, which result from the nonlinear stretching of imperfect beams. Emam [
17], Emam and Nayfeh [
18], Gupta et al. [
19], and Gunda et al. [
20] derived analytical solutions for postbuckling and vibration behaviors of COL beams with and without imperfections. Li and Qiao [
21] studied nonlinear pre- and postbuckling behaviors of imperfect anisotropic composite beams by employing the Newton-iterative method and Galerkin method. Emam and Eltaher [
22] introduced a mathematical model to predict the hygrothermal influence on buckling and postbuckling behaviors of composite imperfect beams. Emam et al. [
23] studied postbuckling and vibration behaviors of imperfect multilayer nonlocal nanobeams under the pre-stress compressive load. Mohamed et al. [
24] established a numerical model to analyze the nonlinear free and forced steady state vibrations of imperfect beams using DIQM. Guo et al. [
25] exploited a domain decomposition to investigate the static and dynamic response of COL curved beams with elastic boundary conditions. Eltaher et al. [
15] presented the influence of curved periodic and nonperiodic profiles of beams on the buckling, postbuckling, and dynamic response using DIQM. Wang et al. [
26] and Yang et al. [
27] introduced a mathematical model to predict buckling and postbuckling behaviors of composite beams reinforced with graphene platelets under electrical force. Mohamed et al. [
28,
29] exploited DIQM and the energy-equivalent method to study buckling and postbuckling behaviors of higher order carbon nanotubes. Eltaher et al. [
30,
31] studied nonlinear buckling, postbuckling, and vibration behaviors of imperfect carbon nanotubes (CNTs) modeled as a beam structure using analytical and numerical methods. Song et al. [
32] presented a comparison between the matched-interface-boundary method and its interpolation for vibrations of stepped structures. Emam and Lacarbonara [
33] developed a general formulation to investigate nonlinear buckling and postbuckling behaviors of curved beams, including the extensibility and shear deformability of the structure. Boutahar et al. [
34] studied bending vibratory behaviors of FG beams using the refined beam theory. Zhang et al. [
35] exploited a new method of curvature constrained interpolation in static and buckling behaviors of straight and strong curved thin beams. Almitani et al. [
36] developed exact solutions for nonlinear bending, buckling, and postbuckling behaviors of imperfect helicoidal composite beams. Karamanli and Vo [
37] studied vibrations of curved zigzag nanobeams using the doublet mechanics theory and finite element procedure.
Although many bio-inspired structures under an impact load have been studied experimentally, very limited research has been performed to present the mechanical bending, buckling, and postbuckling response of curved bio-inspired composite beams. Therefore, this paper aims to comprehensively cover this topic. The rest of the article is organized as follows.
Section 2 presents the constitutive equations, material distribution, geometrical configuration, and problem formulation.
Section 3 illustrates the numerical solution procedure for static bending and buckling response using the differential integral quadrature method.
Section 4 discusses the numerical studies and parametric analyses, while
Section 5 introduces the main conclusions and novel points derived from the parametric studies.
2. Problem Formulation
A laminated composite beam with
uniform layers, total thickness
, length
and width
are presented in the analysis. With respect to the classical beam theory, the axial
and lateral displacements
of a generic point at
can be written as follows [
24]:
where
and
the axial and lateral mid-plane displacements, and
is the initial rise. The normal strain due to deformation is given by
where
is the normal strain and
is the curvature of the mid-plane, which are defined as follows [
29,
38]:
The force
and moment (
resultants can be defined as follows [
17]:
The laminated axial, coupling, and bending stiffness are
,
, and
, respectively, which can be described by
where the reduced-transformed stiffness of a single orthotropic lamina
is defined as follows [
17]:
The transformed matrix
is defined as follows [
39]:
where
is the angle of fibers at
kth lamina. The plane reduced stiffness
can be evaluated by [
17]
where
, and
are four independent material constants. The equations of motion of helicoidal COL beams can be represented by [
15]
where
is the mass per unit length,
is the axial load,
is the transverse load,
are the axial and transverse damping coefficients, respectively. As the in-plane inertia and damping are insignificant on the transverse deflection, they can be neglected. Equations (12) and (13) can be reduced into one equation as follows:
where
is the axial imposed force,
is the elastic shear stiffness of the foundation,
and
are the linear and nonlinear elastic foundation constants, respectively. Moreover,
and
are the distributed transverse and axial loads along the beam length, and
is the forced frequency defining the following quantities:
The nondimensional governing equation is as follows:
where
Herein, the buckling and bending problems are studied. The static equilibrium equation can be acquired by dropping the time dependent terms in Equation (16). The result is as follows [
24]:
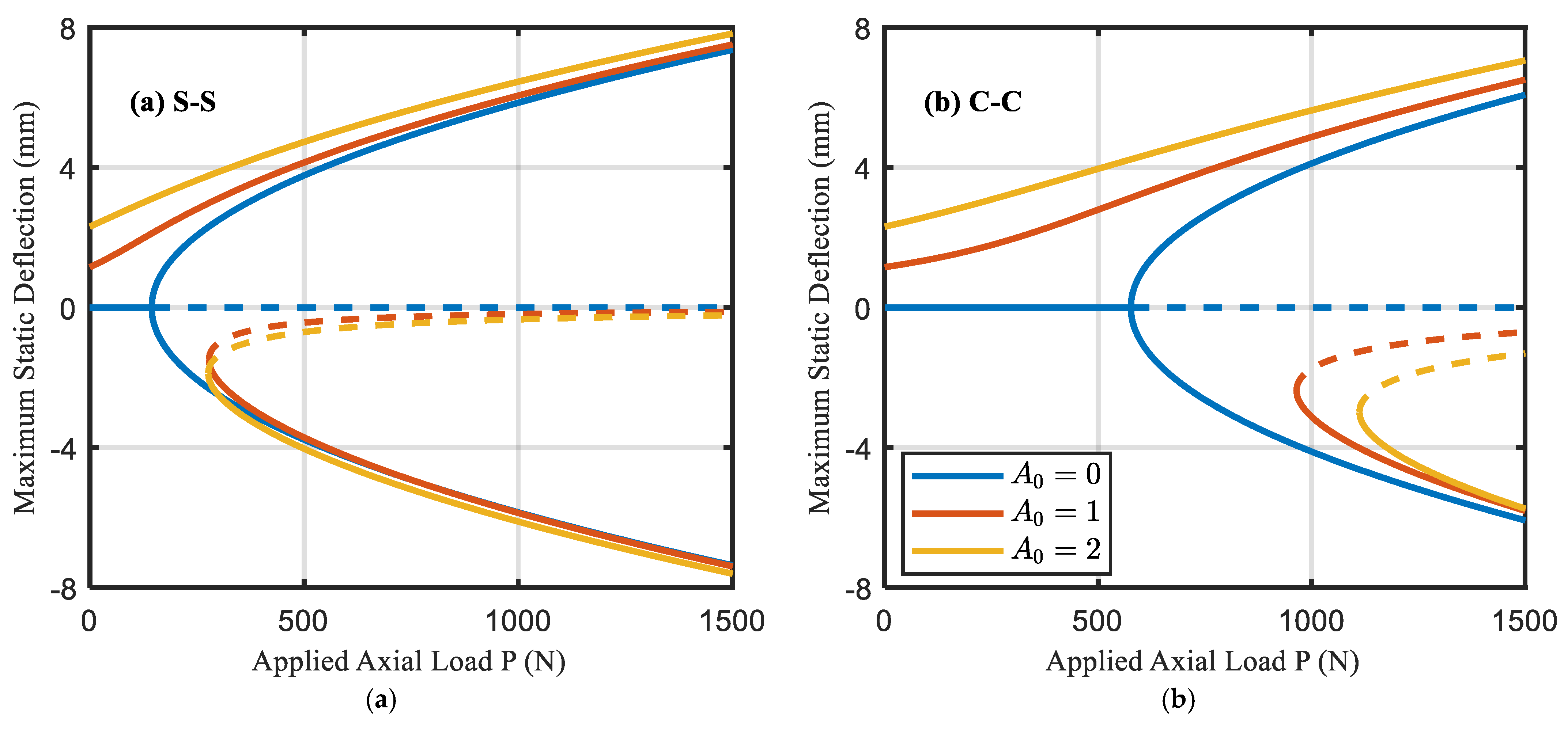
During fabrication or due to heating and cooling processes, the structure may exhibit an initial curved shape as a form of imperfection. Therefore, the initial imperfection can supposedly have the following form, which is accompanied by the first buckling mode as follows:
where
is the amplitude of initial curvature. The boundary conditions in dimensionless form for S-S and C-C beams, respectively are as follows:















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}